Гаркушенко В.И. Лекции по ТАУ
Подождите немного. Документ загружается.

161
RC
- цепей. При этом исходная передаточная функция коррекции разбивается
на произведение передаточных функций типовых корректирующих цепей,
которые приведены в Приложении 2. Указанное разбиение не является
однозначным, поэтому его следует проводить из условия простоты реализации
корректирующего устройства. При этом необходимо стремиться к тому, чтобы
разница в постоянных времени числителя и знаменателя типовой
корректирующей цепи была наименьшей, что снижает влияние шумов в
межкаскадных соединениях.
Для исключения взаимного влияния пассивных корректирующих цепей
между ними устанавливаются операционные усилители с требуемым
коэффициентом усиления или повторители напряжения.
9. Определяется место включения корректирующего устройства с учетом
допустимых входных сигналов.
Вопросы для самопроверки
1. Какие существуют способы синтеза САР?
2. Какие типовые регуляторы используются в промышленности?
3. В каком случае нельзя обеспечить устойчивость замкнутой системы с ПИД-
регулятором?
4. Каким образом определяются параметры ПИД-регулятора с помощью инте-
гральных оценок?
5. Какие используются схемы реализации ПИД-регуляторов?
6. За счет чего в замкнутой системе обеспечивается заданная установившаяся
ошибка?
7. В чем смысл методики синтеза последовательного корректирующего устрой-
ства?
8. От чего зависит желаемая частота среза?
9. Каким образом определяется передаточная функция корректирующего уст-
ройства с помощью ЛЧХ?
162
ЛЕКЦИЯ 13
Пример синтеза последовательного корректирующего устройства. Синтез парал-
лельного корректирующего устройства. Синтез корректирующих устройств по команде и
возмущению.
1. Пример синтеза последовательного корректирующего устройства.
В качестве примера синтеза последовательного корректирующего
устройства рассмотрим следящую систему рис. 11.2 с выбранным
коэффициентом усиления
у
k
на заданный входной сигнал
0 1
( )
g t g g t
, где
передаточные функции
1
( )
W p
,
( )
f
W p
соответствуют к двигателю постоянного
тока с усилителем мощности:
ум дв
1
y дв
( )
( 1)( 1)
k k
W p
p T p T p
,
дв
дв
( )
( 1)
f
f
k
W p
p T p
;
2 р
( )
W p k
– редуктору, связанного с нагрузкой,
ос ос
( )
W p k
– редуктору
обратной связи.
Тогда передаточная функцию нескорректированной разомкнутой
системы имеет вид:
раз
Н
y дв
( )
( 1)( 1)
k
W p
p T p T p
, (1)
где
раз у ум дв р ос
k k k k k k
. В качестве исходных данных примем значения:
раз
100
k
,
дв
0,1
T
с,
y
0,01
T
с.
Согласно методике, рассмотренной в лекции 11, определение передаточ-
ной функции
К
( )
W p
состоит из следующих шагов.
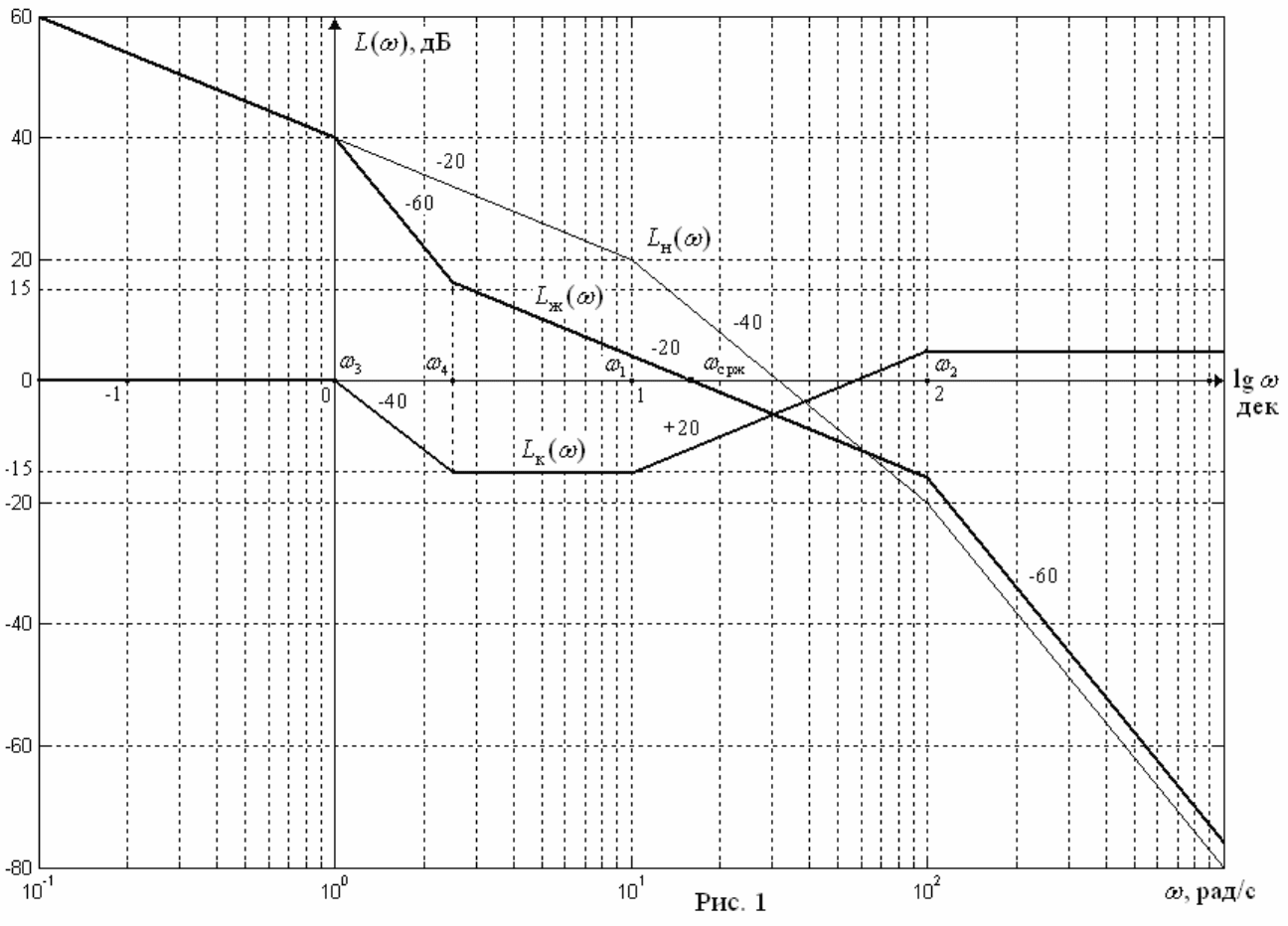
1. По передаточной функции (1) строится ее асимптотическая ЛАХ
Н
( )
L
(рис. 1), в виде суммы асимптотических ЛАХ типовых звеньев с учетом
сопрягающих частот
1 дв
1/
T
=10 рад/с,
2 у
1/
T
=100 рад/с. Методика по-
строения асимптотической ЛАХ для произвольной передаточной функции рас-
смотрена в лекции 4.
Для построения точной ЛАХ
Н
( )
L
и ЛФХ
Н
( )
можно воспользовать-
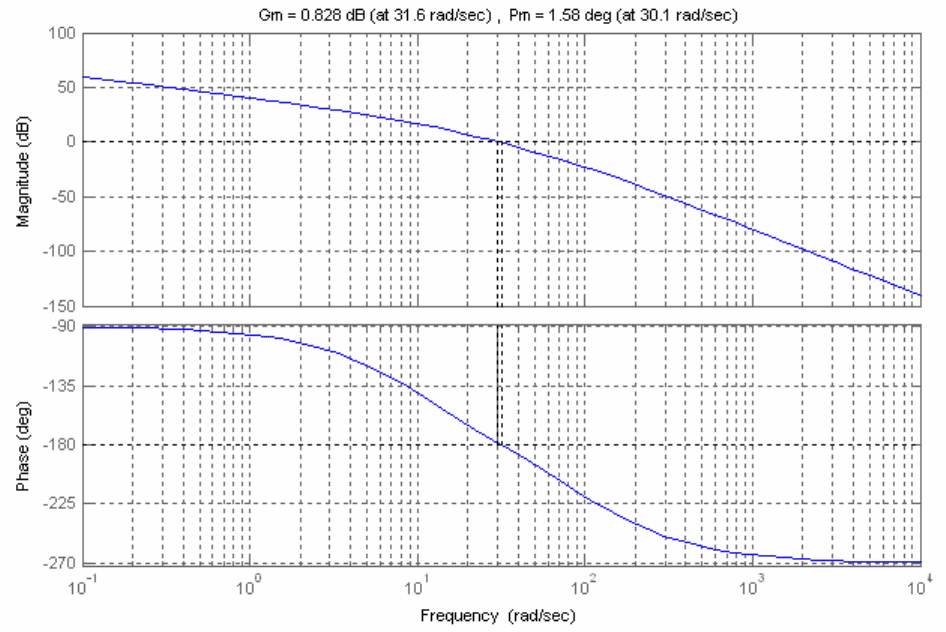
ся программой, составленной в Script-файле:
kpas=100;Ty=0.01;Tdv=0.1;%Исходные данные.
%Передаточная функция Wн(p);
Wn=tf([kpas],[Ty 1])*tf([1],[Tdv 1 0])
figure(1);margin(Wn);grid %Построение ЛАХ и ЛФХ для Wн(p);
%Вычисление корней характеристического уравнения 1+Wн(p)=0:
p=esort(tzero(1+Wn))
%Построение переходной характеристики замкнутой
%нескорректированной системы
Wz=feedback(Wn,1); figure(2);step(Wz);grid
Результат выполнения программы представлен на рис. 2, где указаны запас
по амплитуде 0,828 дБ и фазе 1,58 град.
Рис. 2
Также вычисляются корни характеристического уравнения
Н
1 ( ) 0
W p
,
которые имеют значения: –0,39
j
30,26; –109,23, и осуществляется построе-
ние переходной характеристики замкнутой системы (рис. 3)
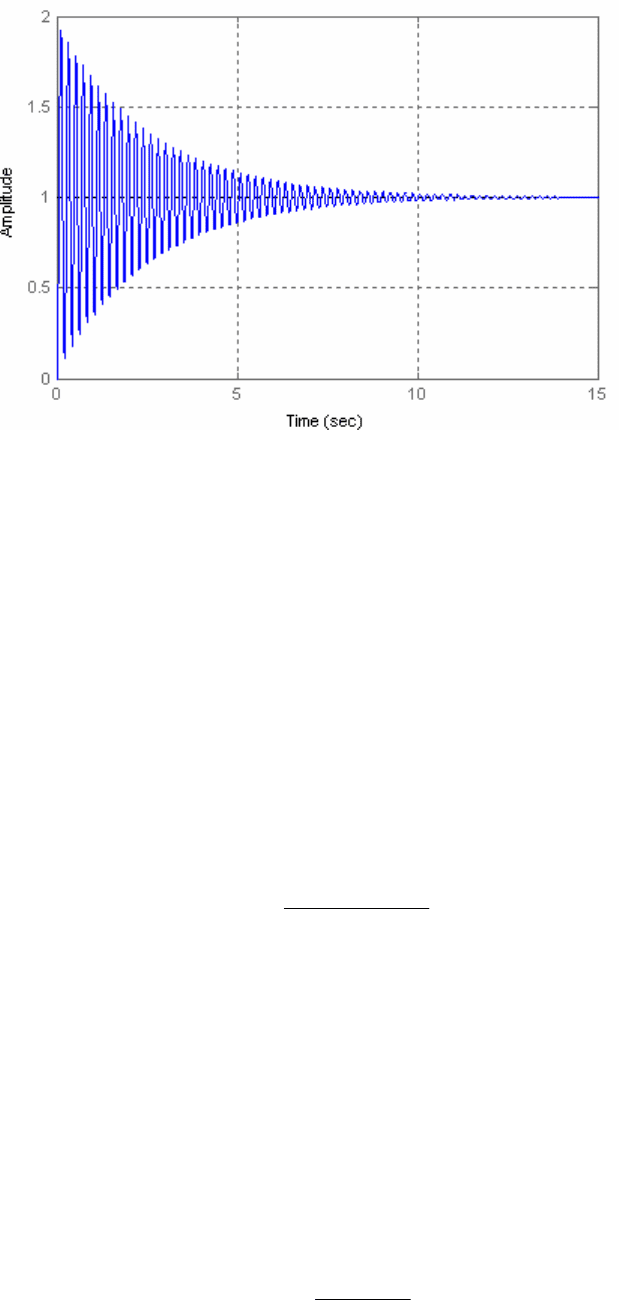
3
Рис. 3
Из полученных результатов следует, что нескорректированная система
устойчива, но обладает плохими динамическими свойствами. Поэтому в систе-
ме необходимо использовать корректирующее устройство.
2. Для заданных показателей качества
*
p
0,75
t с,
*
30% определяется
структура передаточной функции
Ж
( )
W p
. С этой целью проведем факториза-
цию числителя и знаменателя передаточной функции
раз
Н
+
Н Н
( )
( ) ( )
k
W p
d p d p
,
где полином
+
Н дв y
( ) ( 1)( 1)
d p T p T p
имеет корни
д1 в
10
1/Tp
,
y2
100
1/Tp
, для которых время регулирования
p
3/ 3/10 0,3
t
с, что
меньше заданного значения
*
p
t
; полином
Н
( )
d p p
имеет корень
1
0
p
, рас-
положенный на мнимой оси. Тем самым передаточная функция разомкнутой
желаемой системы должна иметь вид
+
Ж
Ж
+
Ж
( )
( )
( )
m p
W p
pd p
, (2)
где неизвестные полиномы
+
Ж
( )
m p
и
+
Ж
( )
d p
определяются с помощью методи-
ки построения
Ж
( )
L
. Сохранение интегрирующего звена в передаточной

4
функции (2), также необходимо для обеспечения статизма системы к входному
сигналу
1
g t
.
а) Построение ЛАХ в области средних частот:
С помощью номограмм рис. 11.3 определяем желаемую частоту среза
*
срж p
3,8 /
t
для
*
30%. Тем самым находим
срж
15,9
и
срж
lg 1,2
.
На рис.1 через точку
cpж
проводим отрезок ЛАХ с наклоном
20
дБ/дек,
у которого слева от
cpж
значение
*
ж 4 1
( )
L L
, а справа
*
ж 2 2
( )
L L
, где
*
1
L
,
*
2
L
15 дБ. Тем самым определяется среднечастотный диапазон
4 2
.
б) Построение ЛАХ в области низких частот:
Проводим сопряжение среднечастотного участка
Ж
( )
L
с низкочастот-
ным участком
Н
( )
L
нескорректированной системы с помощью сопрягающей
части, т.е. отрезка прямой в интервале частот
3 4
при
Ж 3 Н 3
( ) ( )
L L
с
наклоном
60 дБ/дек. При этом желаемая передаточная функция будет иметь
вид (2), у которой коэффициент усиления равен
раз
k
нескорректированной сис-
темы.
в) Построение ЛАХ в области высоких частот:
Построим высокочастотный участок
Ж
( )
L
из условия получения наибо-
лее простого корректирующего устройства. Для этого необходимо, чтобы впра-
во от частоты
2
желаемая ЛАХ имела наклон равный наклону
Н
( )
L
.
Результат построения асимптотической ЛАХ
Ж
( )
L
представлен на
рис.1, где
3
1
,
4
2,5
,
2
100
.
3. По виду желаемой ЛАХ восстанавливается передаточная функция
2
раз 4
Ж
2 2
3 y
( 1)
( )
( 1) ( 1)
k T p
W p
p T p T p
, (3)
где
3 3
1/ 1
T
с,
4 4
1/ 0,4
T
с.
4. По передаточной функции
Ж
( )
W p
строятся ее точные ЛАХ и ЛФХ
Ж
( )
(рис. 4) и определяются запасы устойчивости по фазе и амплитуде:
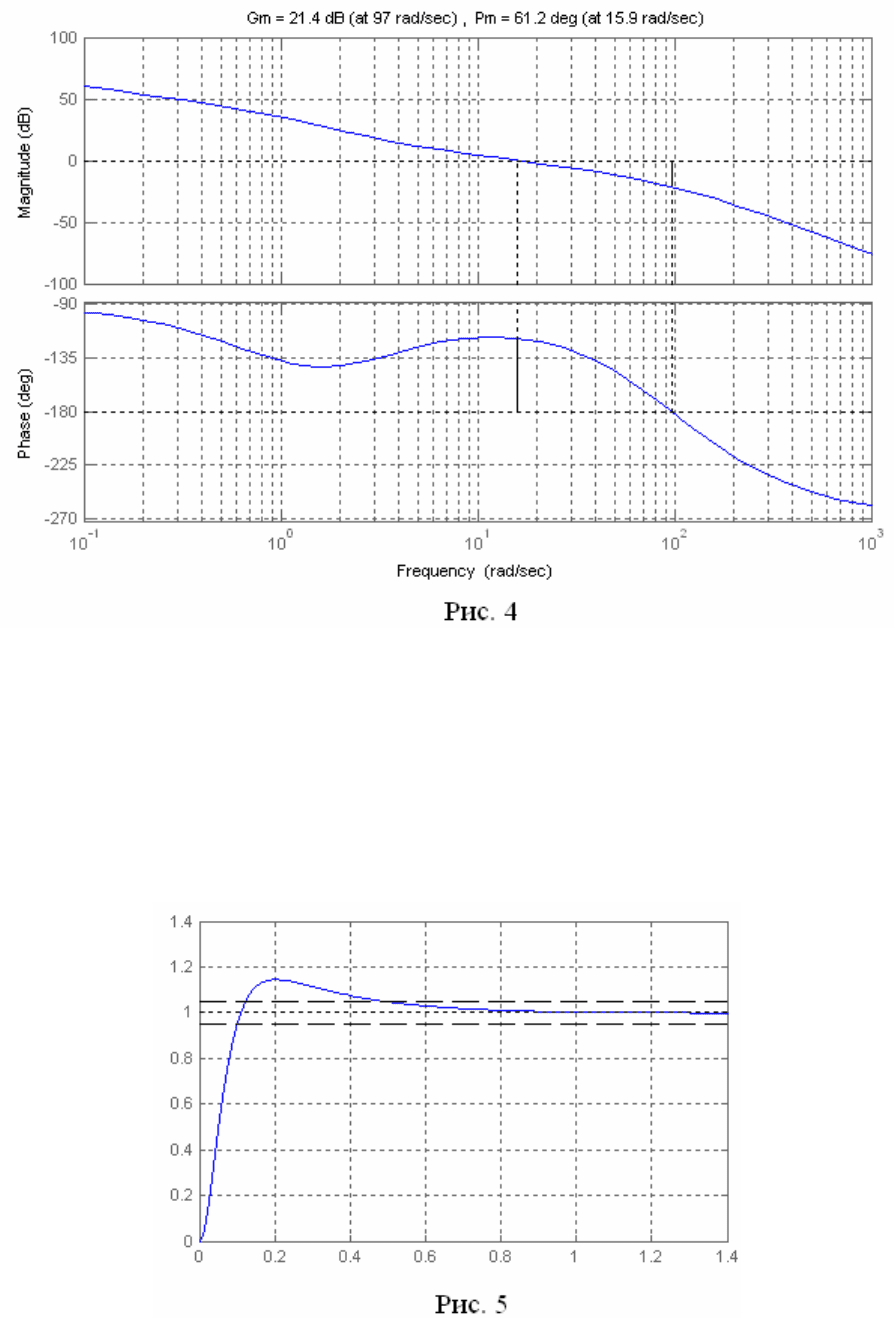
5
2
L
21,4 дБ и
З
61,2 град, т.е. обеспечиваются желаемые запасы:
2
15
L
дБ,
60
З
град.
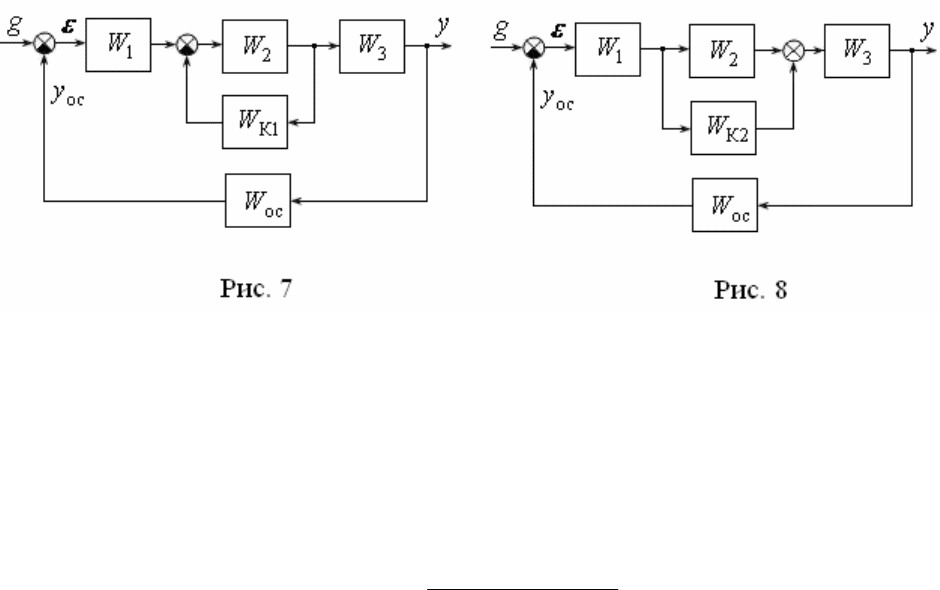
5. Определяются показатели качества
p
t
,
полученной замкнутой
системы по переходной характеристике
ж
( )
h t
, представленной на рис. 5, из
которой следует, что
p
0,5
t с,
15
%, т.е. выполняются заданные показатели
качества.

6
6. Поскольку
*
p p
t t
,
*
, то процесс синтеза закончен.
7. Определяется передаточная функция последовательной коррекции по
формуле
К Ж Н
( ) ( )/ ( )
W p W p W p
или с помощью ее логарифмической характе-
ристики
к ж н
( ) ( ) ( )
L L L
, представленной на рис. 1, по виду которой вос-
станавливается передаточная функция
К
( )
W p
:
2
4 дв
К
2
3 y
( 1) ( 1)
( )
( 1) ( 1)
T p T p
W p
T p T p
. (4)
Таким образом, найдена структура и параметры передаточной функции
корректирующего устройства.
8. По найденной передаточной функции корректирующего устройства
составляется его электрическая схема. Для этого передаточную функцию (4)
представим в виде произведения двух передаточных функций:
4 дв
4
К
3 y 3
( 1)( 1)
( 1)
( )
( 1)( 1) ( 1)
T p T p
T p
W p
T p T p T p
. (5)
Поскольку
3 4 дв y
T T T T
, то для реализации первой передаточной
функции в соответствии с таблицей Приложения 2 можно использовать интег-
ро-дифференцирующую цепь постоянного тока. Учитывая, что у второй пере-
даточной функции
3 4
T T
, используем активную дифференцирующую цепь.
Тогда электрическая схема корректирующего устройства будет иметь вид рис.
6, где значения сопротивлений и емкостей определяются по формулам таблицы
П.2.
Рис. 6
7
9. Включение корректирующего устройства осуществляется после сигна-
ла ошибки с учетом допустимого входного сигнала на операционном усилите-
ле. Если сигнал рассогласования превышает допустимое значение, то его необ-
ходимо ослабить и затем соответственно усилить в следующих каскадах усили-
телей. Если уровень сигнала рассогласования мал, то необходимо сначала уси-
лить сигнал перед корректирующим устройством и затем соответственно осла-
бить в следующих каскадах усилителей.
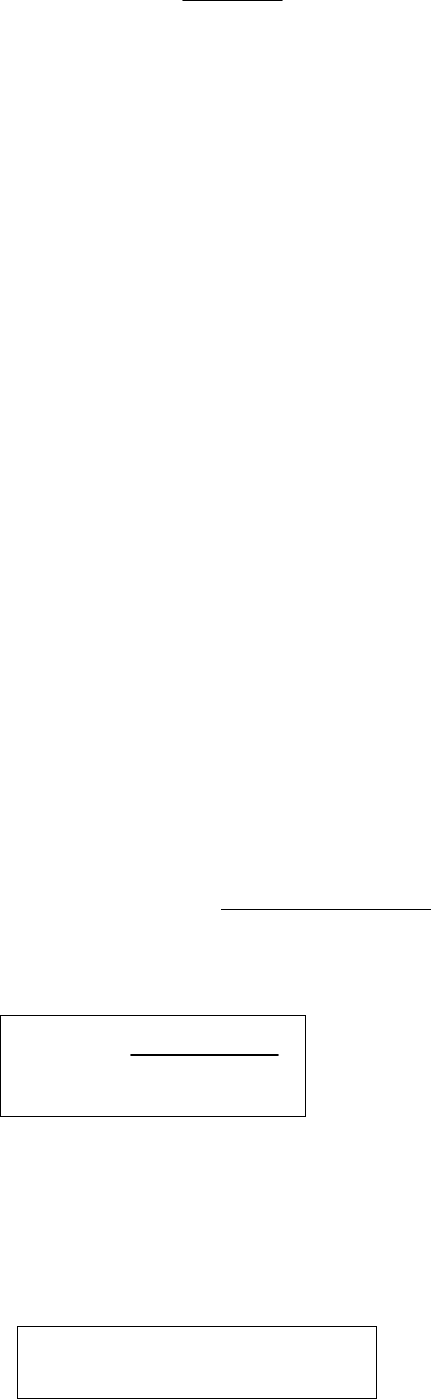
2. Синтез параллельного корректирующего устройства.
Недостатком последовательной коррекции является чувствительность по-
казателей качества к изменению параметров системы. Для устранения этого не-
достатка может быть использовано параллельно-встречное корректирующее
устройство, представленное на рис. 7 передаточной функцией
К1
( )
W p
.
Данное корректирующее устройство охватывает обратной связью эле-
мент прямой цепи с передаточной функцией
2
( )
W p
, у которой параметры могут
изменяться. Передаточная функция участка цепи с параллельным корректи-
рующим устройством имеет вид
2
2
К1 2
( )
( )
1 ( ) ( )
W p
W p
W p W p
(6)
Обычно в достаточно широком и существенном для качества системы
диапазоне частот справедливо неравенство
К1 2
| ( ) ( )| 1
W j W j
(7)
Тогда в этом диапазоне частот справедливо приближенное равенство
8
2
К1
1
( )
( )
W j
W j
. (8)
Таким образом, при выполнении условия (7) свойства участка цепи с па-
раллельным корректирующим устройством определяются только лишь свойст-
вами этого корректирующего устройства, т.е. изменение параметров переда-
точной функции
2
( )
W p
практически не влияет на качество системы.
Другое достоинство данного корректирующего устройства заключается в
том, что в качестве устройства с передаточной функцией
2
( )
W p
может быть
усилитель мощности или исполнительный элемент с высоким уровнем сигнала,
что облегчает реализацию коррекции.
Для реализации коррекции также используется прямое параллельное кор-
ректирующее устройство
К2
( )
W p
, приведенное на рис. 8. Передаточная функ-
ция участка цепи с параллельным корректирующим устройством имеет вид
2 К2
( ) ( )
W p W p
.
Синтез параллельной коррекции проводится по найденной передаточной
функции последовательной коррекции
К
( )
W p
с желаемой передаточной функ-
цией
Ж К 1 2 3
( ) ( ) ( ) ( ) ( )
W p W p W p W p W p
разомкнутой системы рис. 7 и рис.8.
Затем для схемы рис. 7 определяется
К1
( )
W p
из уравнения
2
К1
1 3
К 1 2 3
2
( ) ( )
( ) ( ) ( ) ( )
( )
1 ( ) ( )
W p W p
W p W p W p W
W p
W p W p
p
,
которое имеет вид
К
К
К1
2
1 ( )
(
( ) ( )
)
W p
W p
W
W p
p
.
(9)
Соответственно для схемы рис. 8 выражение
К1
( )
W p
определяется из
уравнения
К 1 2 3 2 К1 32
( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
W p W p W p W p W p WW p W p
p
,
которое имеет вид
К1 К 2
( ) ( ) 1
( )
WW p W p
p
.
(10)