Голдаев С.В., Ляликов Б.А. Основы математического моделирования в теплотехнике
Подождите немного. Документ загружается.


Голдаев С.В., Ляликов Б.А. Основы математического моделирования
в теплотехнике: Учебное пособие. - Томск: Изд. ТПУ, 1999. – 106 с.
21
⎪
⎩
⎪
⎨
⎧
=++
=++
=++
.
,
,
2222121020
1212111010
0202101000
cababab
cababab
cababab
(2.13)
Вычисляя коэффициенты этой системы по формулам (2.11), где
i = 0, 1, 2, 3, 4, 5, получаем:
()
()
()
()
∑∑
∑∑
∑
∑
∑
====
====
===
====
====
==
=
=
=
.226,335)()10/(,674,234)(10/
,42,206)(,596,2410/
,509,1410/
,153,910/
,538,610/,6
223
2
3
1
5
0
0
5
1
4
3
22
5
1
3
3
2112
5
1
2
3
201102
5
0
3
100100
ipiipi
i
ip
i
i
i
i
i
i
i
i
cTccTc
ccTb
Tbb
Tbbb
Tbbb
μμ
μ
Замечание. Чтобы избежать громоздких расчетов, табличные значения
температур были уменьшены в 1000 раз. Такой прием нормирования приме-
няется часто, например, при определении лучистого теплового потока по за-
кону Стефана – Больцмана, когда температуры газа, достигающие значений
3000 К, приходится возводить в четвертую степень [27-30].
Как видно, все коэффициенты b
kl
при k+l = const равны между собой, что
сокращает объем вычислений.
Система уравнений (2.13) запишется в виде:
⎪
⎩
⎪
⎨
⎧
=++
=++
=++
.226,335596,24509,14153,9
,674,234509,14153,9538,6
,42,206153,9538,66
210
210
210
aaa
aaa
aaa
(2.14)
Определяем неизвестные по правилу Крамера [20], [36]:

Голдаев С.В., Ляликов Б.А. Основы математического моделирования
в теплотехнике: Учебное пособие. - Томск: Изд. ТПУ, 1999. – 106 с.
22
,
,
,,,
211202210121102
210212120122110
22212
12111
02010
0
211200221001201102
211210201201221100
222120
121110
020100
2
2
1
1
0
0
bbcbcbcbb
bbccbbbbc
bbc
bbc
bbc
D
bbbbbbbbb
bbbbbbbbb
bbb
bbb
bbb
D
D
D
a
D
D
a
D
D
a
−−
−++
==
−−
−++
==
===
(2.15)
.
,
211002100120110
210102010121100
22120
11110
00100
2
212002210020102
2112102012022100
22220
12110
02000
1
bcbcbbbbc
bcbbcbcbb
cbb
cbb
cbb
D
bcbbbcbcb
bcbbbcbcb
bcb
bcb
bcb
D
−−
−++
==
−−
−++
==
Вычисляя определители, находим значения параметров эмпирической
формулы: a
0
= 26,48, a
1
= 11,37, a
2
= -2,94. Таким образом, искомая аппрок-
симация функции, заданной таблично, имеет вид:
(
)
(
)
.10/94,210/37,1148,26
~
2
33
TTc
p
−+=
μ
Оценку достоверности этой интерполяционной формулы получим путем
вычисления относительных погрешностей в заданных точках молярных теп-
лоемкостей, т.е. найдем значения
.
)(
)()
~
(
)(
ip
ipip
ip
i
i
p
c
cc
c
c
μ
μ
μ
μ
ε
δμ
−
==
T, K
273 573 873 1273
1573 1973
,
p
c
μ
кДж/(кмоль⋅К)
29, 278 31, 836 34, 206 35, 919 36,756 37, 720
,
~
p
c
μ
кДж/(кмоль⋅К)
29, 373 32, 044 34, 184 36, 213 37,115 37, 49
,
~
p
c
δμ
%
0, 3 0, 6 0.06 0, 8 0, 95 0, 6
Как упоминалось выше, с целью повышения точности аппроксимирую-
щей функции используются полиномы высокой степени.
Пример 2.4 В опыте получены следующие данные, характеризующие
связь давления насыщения аммиака с температурой:
T
s
, K
273 278 283 288 293
p
s
, МПа 0,419 0,504 0,602 0,714 0,841

Голдаев С.В., Ляликов Б.А. Основы математического моделирования
в теплотехнике: Учебное пособие. - Томск: Изд. ТПУ, 1999. – 106 с.
23
С помощью метода наименьших квадратов требуется выразить зависи-
мость ps = f(Ts) в виде:
.
3
3
2
210 ssss
TaTaTaap +++=
(2.16)
В данном случае имеем m = 3, n = 4, а система уравнений (2.10) запишет-
ся следующим образом:
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=+++
=+++
=+++
=+++
.
,
,
,
3333232131030
2323222121020
1313212111010
0303202101000
cabababab
cabababab
cabababab
cabababab
(2.17)
Решим эту систему методом Гаусса. Для исключения a
0
из второго,
третьего и четвертого уравнений прибавляем к ним первое, умноженное со-
ответственно на (–b
10
/b
00
), (–b
20
/b
00
), (–b
3
0/b
00
). Получаем равносильную сис-
тему уравнений вида
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=++
=++
=++
=+++
,
,
,
,
31333232131
21323222121
11313212111
0303202101000
cagagag
caeaeae
cadadad
cabababab
(2.18)
где
.,,
,,,
,,,
,,,
00
030
331
00
020
221
00
010
111
00
3003
3333
00
3002
3232
00
3001
3131
00
2003
2323
00
2002
2222
00
2001
2121
00
1003
1313
00
1002
1212
00
1001
1111
b
cb
cc
b
cb
cc
b
cb
cc
b
bb
bg
b
bb
bg
b
bb
bg
b
bb
be
b
bb
be
b
bb
be
b
bb
bd
b
bb
bd
b
bb
bd
−=−=−=
−=−=−=
−=−=−=
−=−=−=
(2.19)

Голдаев С.В., Ляликов Б.А. Основы математического моделирования
в теплотехнике: Учебное пособие. - Томск: Изд. ТПУ, 1999. – 106 с.
24
Теперь из последних двух уравнений исключаем a1. Для этого умножаем
второе уравнение последовательно на (–e
21
/d
11
) и (–g
31
/d
11
) и складываем с
третьим и четвертым уравнениями. Получаем:
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=+
=+
=++
=+++
,
,
,
,
32333232
22323222
11313212111
0303202101000
caiai
cahah
cadadad
cabababab
(2.20)
где
.,
,,
,,
11
1131
3132
11
1121
2122
11
3113
3333
11
3112
3232
11
2113
2323
11
2112
2222
d
cg
cc
d
ce
cc
d
gd
gi
d
gd
gi
d
ed
eh
d
ed
eh
−=−=
−=−=
−=−=
(2.21)
Наконец, исключаем a
2
из четвертого уравнения, умножая предыдущее на
(-i
32
/h
22
) и складывая с ним:
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=
=+
=++
=+++
,
,
,
,
33333
22323222
11313212111
0303202101000
cah
cahah
cadadad
cabababab
(
2.21)
где
.,
22
2232
3233
22
3223
3333
h
ci
cc
h
ih
ih −=−=
(2.22)
На этом заканчивается прямой ход метода Гаусса.
Замечание. В процессе исключения неизвестных неоднократно выполня-
лись операции деления на коэффициенты b
00
и т.д. Поэтому они должны
быть отличными от нуля; в противном случае необходимо соответственным
образом переставить уравнения системы. Такая процедура должна быть пре-
дусмотрена в вычислительном алгоритме при его реализации на ЭВМ.
Обратный ход начинается с решения четвертого уравнения системы
(2.21):
./
33333
hca
=
Используя это значение, можно найти a
2
из третьего уравнения, а затем a
1
из второго и a
0
из первого.

Голдаев С.В., Ляликов Б.А. Основы математического моделирования
в теплотехнике: Учебное пособие. - Томск: Изд. ТПУ, 1999. – 106 с.
25
Аналогично организуется вычислительный алгоритм для линейной сис-
темы с произвольным числом уравнений.
Возвращаясь к примеру 2.4, вычисляем коэффициенты этой системы по
формулам (2.11), где i = 0, 1, 2, 3, 4, получаем:
()
()
() ()
()
∑
∑
∑∑
∑∑
∑∑
∑∑
====
====
=======
=======
========
=
=
.94,75)()10/(,65,26)()10/(
,36,9)(10/,29,3)(
,29,91310/,91,32110/
,63,259210/,54,113)10/(
,07,4010/,15,1410/,5
332
3
222
2
2
1
4
0
0
5
2
3223
4
2
312213
6
2
33
32
30211203
2
2
201102
4
0
2
100100
isiisi
isi
i
is
ii
ii
i
i
i
pTcpTc
pTcpc
TbbTbbb
TbTbbbb
TbbbTbbb
Реализуя метод Гаусса, находим по формулам (2.18), (2.20), (2.22) значе-
ния соответствующих коэффициентов:
,301,1,306,0,054,0,448,14
,801,0,402,3,801,0
,6,0,142,0,025,0
31211133
22322322
3113211211
====
====
=
=
=
=
=
cccg
egee
gdedd
.10091,1,107296,2,100808,1,1003,1
,10768,4,10657,2,10056,2,1068,2
3
33
3
33
3
32
6
22
3
33
4
32
4
23
5
22
−−−−
−−−−
⋅=⋅=⋅=⋅−=
⋅=⋅=⋅=⋅=
chcc
iihh
Осуществляя обратный ход, подставляем найденные значения коэффици-
ентов в (2.21) и находим требуемые неизвестные:
a
3
=0,4, a
2
= -3,105, a
1
= 10,13, a
0
= -12, 21.
Следовательно, аппроксимационная зависимость (2.15) имеет вид:
.104,010105,31013,021,12
36
2
4
ssss
TTTp
−−
⋅+⋅−+−=
Ниже представлены файлы с программой, с исходными данными и ре-
зультатами решения системы линейных алгебраических уравнений методом
Гаусса.
program Gauss;
uses Uchism2;
var a,c : matr; b,x,g : vector; n : integer;
begin
assign(finp,'c:\tp55\bor\metod\mynew\mod\primer\dgauss.dat');
reset(finp);
assign(fout,'c:\tp55\bor\metod\mynew\mod\primer\rgauss.dat');
rewrite(fout); readln(finp,n); { Ввод ранга матрицы}
for I:=1 to N do for J:=1 to N do
Голдаев С.В., Ляликов Б.А. Основы математического моделирования
в теплотехнике: Учебное пособие. - Томск: Изд. ТПУ, 1999. – 106 с.
26
read(finp,A[I,J]); readln(finp);{ Ввод матрицы }
for I:=1 to N do read(finp,b[i]); {Ввод вектора свободных
членов}
Gauss(n,a,b,x,g,c);
writeln(fout,'':10,'Вектор решения системы'); writeln(fout,'');
for i:=1 to n do write(fout,x[i]:9:3);
writeln(fout,''); writeln(' Программа закончила работу ...');
readln; close(finp); close(fout);
end.
Исходные данные
3
6.000 6.538 9.153
6.538 9.153 14.509
9.153 14.509 24.596
206.420 234.674 335.226
*** Вектор решения системы уравнений ***
26.495 11.370 -2.938
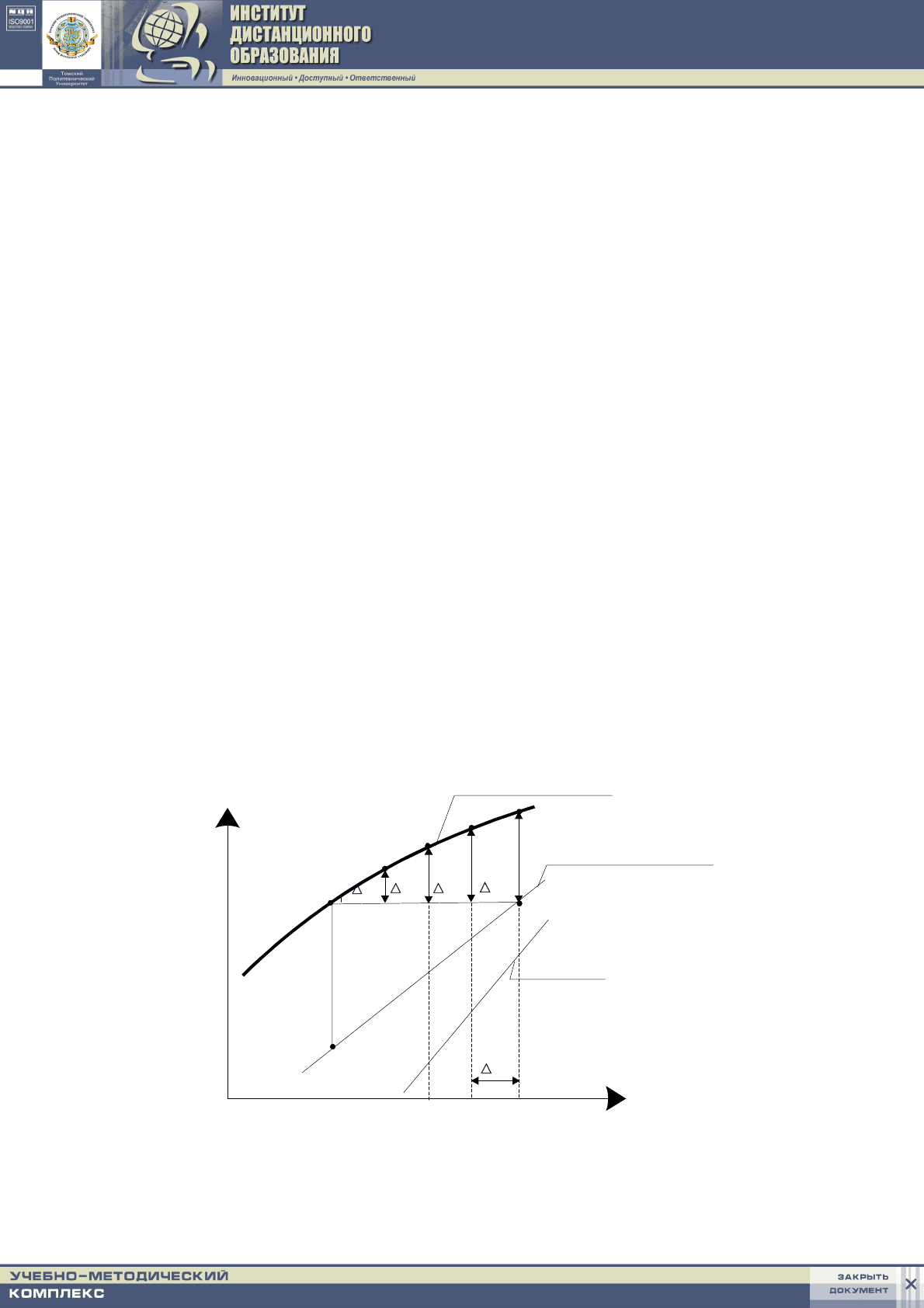
Пример 2.5. При построении на ЭВМ ректификационного процесса для
бинарной смеси (спирт- вода) необходимо перевести зависимость Y = f(X)
из табличной в аналитическую форму. На рис.2.8 показан укрупненный
фрагмент диаграммы равновесия, который помогает представить стадию мо-
делирования этого процесса для одной ступени [39].
X
X
Y
Y
1
Y
1
Y
3
1
2
Y=f (x)
3
Диагональ
Рабочая диагональ
Кривая равновесия
Y
2
X
1
,
X
1
,
X
2
,
X
2
,
X
2
X
1
X
3
1
1
1
3
рл
рл
кр
рл
рл
кр
рл
рл
Y
Y
Y
Y
(
(
(
(
)
)
)
)
Рис.2.2. Иллюстрация к построению ректификационного процесса.

Голдаев С.В., Ляликов Б.А. Основы математического моделирования
в теплотехнике: Учебное пособие. - Томск: Изд. ТПУ, 1999. – 106 с.
27
Осуществим эту процедуру с применением метода наименьших квадра-
тов. Допустим, что координаты точки 1 заданы или определены из предыду-
щих расчетов. При построении линии 1-2 необходимо определить координа-
ты по X (так как Y
2
=Y
1
= const) точки 2 программным путем. При ручном
способе построения координата этой точки определяется проектировщиком
визуально при пересечении двух линий - кривой равновесия и горизонталь-
ной линии, исходящей из точки 1. На ЭВМ визуальное фиксирование точки,
образующейся при пересечении двух линий, возможно при использовании
графического редактора либо системы автоматизированного проектирования
(САПР). В данном примере рассматривается возм
ожность математического
моделирования процесса на основе аналитических расчетов координат точки
2.
Алгоритм построения горизонтальной линии 1-2, т. е., в конечном ито-
ге, нахождение координаты X
2
, сводится к следующему итеративному циклу:
1.По величине абсциссы рабочей линии Х
1
точки 1 определяем значение ор-
динаты кривой равновесия Y
1
кр (с использованием процедур Appr и Yap).
2.Производим сравнение ординат кривой равновесия и рабочей линии:
ΔY
1
= Y
1кр
- Y
1рл
.
3.Если Y
1
кр
> Y
1
рл
, если ΔY
i
> ε (заданная степень точности), то значение X
1
рл
уменьшается на величину шага
Δ
X, и итерационный процесс продолжается,
иначе цикл по поиску координаты Х
2
кр
точки 2 прекращается с фиксацией
усредненного значения X
2
на последнем шаге.
Для построения точки 3 необходимо определить значение ординаты Y
3рл
,
которая находится из аналитического выражения рабочей линии по известному
значению X
2кр
.
Описанный алгоритм реализован в виде программы, листинг которой ,
исходные данные и результаты решения примера 2.5 представлены ниже.
program grappr;
uses uchism2;
var xxx1,yyy1 : mac16; {Массивы табличных данных аппроксими-
руемой зависимости}
begin
assign(finp,’c:\tp55\st\G6A54\dint1.dat’);
reset(finp);
assign(fout,’c:\tp55\st\G6A54\rint1.dat’);
rewrite(fout);
readln(finp,H); {Считывание количества точек в табличной зависимо-
сти}
for i:=1 to h do read(finp,xxx1[i]); { Считывание массивов табличных}
for i:=1 to h do read(finp,yyy1[i]); аргументов и функций}
Appr(H,E1,Xxx1,Yyy1,MM,Na,E,Z); {Обращение к процедуре аппрок-
симации}

Голдаев С.В., Ляликов Б.А. Основы математического моделирования
в теплотехнике: Учебное пособие. - Томск: Изд. ТПУ, 1999. – 106 с.
28
writeln(fout,’’);
writeln(fout,’Полином аппроксимации кривой равновесия:’);
writeln(fout,’’);
write(fout,’ Y= ‘,Z[1]:9:3); {Вывод аппроксимирующего полинома}
for I:=2 to Na do
if (I=4) or (I=8) or (I=12) then
begin
if Z[i]>=0 then
write(fout,’ + ‘);
writeln(fout,Z[I]:10:3,’*X^’,I-1:2)
end
else
begin
if Z[i] >=0 then
write(fout,’ + ‘);
write(fout,Z[I]:10:3,’*X^’,I-1:2);
end;
writeln(fout,’’);
yap(0.9,z,q); {Расчет по аппроксимирующей функции для заданного
аргумента}
writeln(fout,’Для Х = 0.9 у = ‘, q:6:3);
Close(finp);
Close(Fout);
end.
Исходные данные
12
0 0.05 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
0 0.332 0.442 0.531 0.576 0.614 0.654 0.699 0.753 0.818 0.898 1.0
Полином аппроксимации кривой равновесия:
Y= 0.001 + 10.045
.
X - 90.169
.
X
2
+ 451.967
.
X
3
+1231.025
.
X
4
+ 1515.852
.
X
5
+ 529.552
.
X
6
- 4232.465
.
X
7
+5463.671
.
X
8
- 2969.596
.
X
9
+ 456.013
.
X
10
+ 97.155
.
X
11
Для Х = 0.9; Y = 0.898
3. МЕТОДЫ РЕШЕНИЯ НЕЛИНЕЙНЫХ УРАВНЕНИЙ
В ряде случаев анализа различных задач теплотехники [28-31] возникает
необходимость решения нелинейных уравнений вида
()
0,...,,
21
=
ppxF
,
(3.1)
где F(x) – некоторая непрерывная функция, p
1
, p
2
, - параметры.
Голдаев С.В., Ляликов Б.А. Основы математического моделирования
в теплотехнике: Учебное пособие. - Томск: Изд. ТПУ, 1999. – 106 с.
29
Разработано несколько приближенных алгоритмов решения такого типа
уравнений, которые относятся к итерационным [18], [20-23], [32], [36].
В методе простой итерации исходное уравнение (3.1) приводится к виду
()
,...,,
21
ppxfx =
.
(3.2)
Вначале графически или подбором находится нулевое (грубое) значение
корня x = с
0
, а затем оно уточняется путем последовательного вычисления
()
...),2,1(,,...,,
211
=
=
+
ippcfc
ii
(3.3)
до тех пор, пока отличие последующего приближения от предыдущего не
превысит заданной погрешности ε, т.е.
()
ε
<−
+ iii
ccc /
1
.
(3.4)
Описанный процесс сходится в случае, когда
()
1/,...,,
21
<dxppcdf
i
.
(3.5)
Если это условие не выполняется, то уравнение (3.2) преобразовывают
подходящим образом, например, переходя к обратной функции.
В тех вариантах, когда функция y = f(x) очень громоздкая, процедуру
схождения процесса проверяют практически, по критерию (3.4). Итерацион-
ный процесс может осуществляться колебательным образом, в течение кото-
рого значения x
i
приближаются к искомому корню то «сверху», то «снизу».
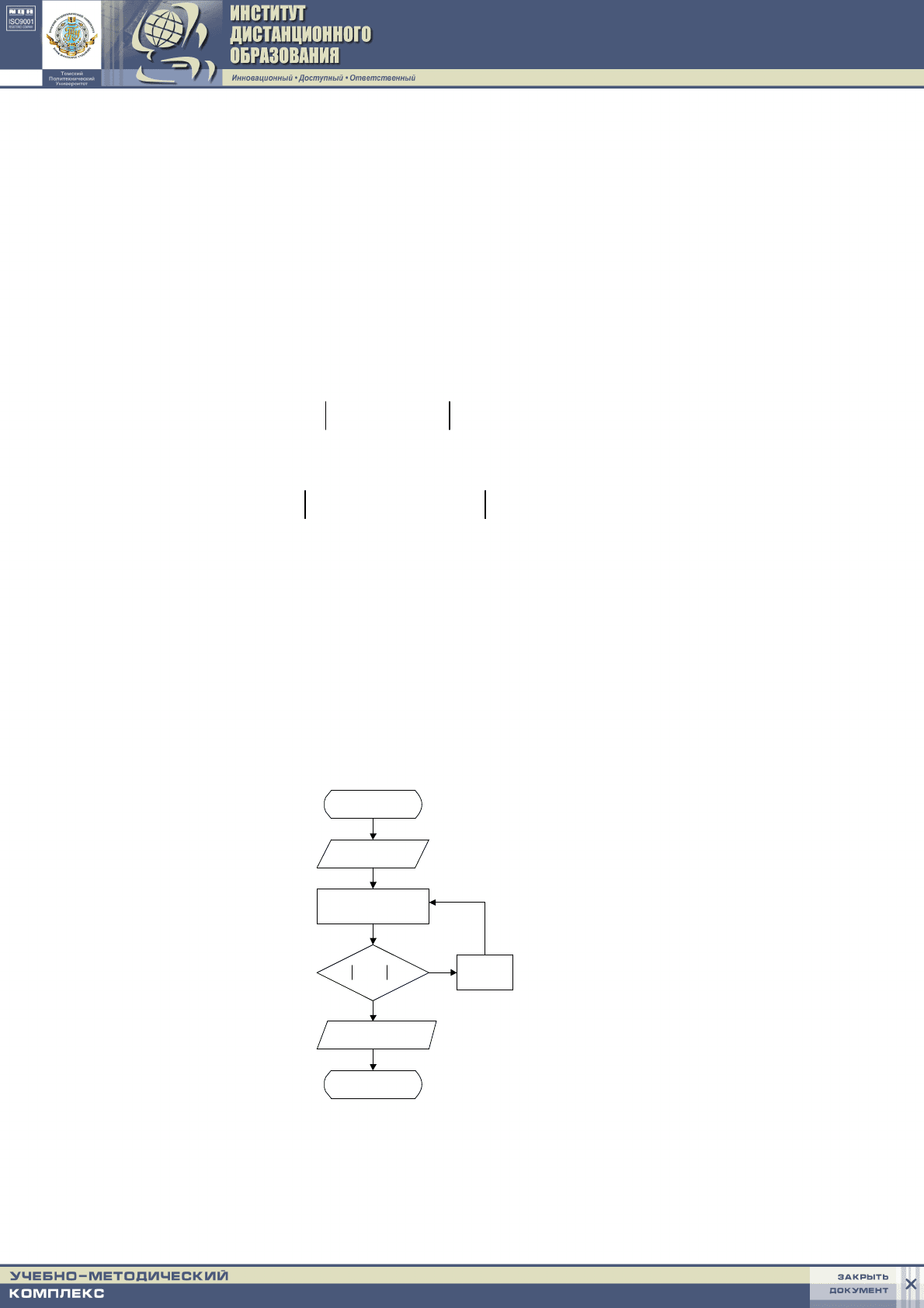
На рис.3.1 представлена блок-схема процесса решения нелинейного урав-
нения (3.2) этим методом.
Рис.3.1 Блок-схема метода
простой итерации
x-c
< ε
Начало
Ввод с
, ε
x
=
f
(c)
c
=
x
Вывод
Конец

Голдаев С.В., Ляликов Б.А. Основы математического моделирования
в теплотехнике: Учебное пособие. - Томск: Изд. ТПУ, 1999. – 106 с.
30
Здесь c – начальное приближение корня, а в дальнейшем – результат пре -
дыдущей итерации, x – значение корня после каждой итерации. В данном ал-
горитме предполагается, что итерационный процесс сходится. Если такой
уверенности нет, то необходимо ограничить число итераций или ввести про-
межуточную печать в цикле.
Листинг программы, составленной по описанному алгоритму, воспроиз-
веден ниже
program itera;
uses crt;
var x,x1,e:real; m,n,i:integer;
function f(x:real):real;
begin f:=5*(1-exp(-x)); end;
procedure iter (var x,e:real;
m:integer);
begin for i:=1 to m do begin
x1:=x; x:=f(x); if abs((x-x1)/x1)<e then exit;
if i=m then writeln ('iteratsi use')
end;
end;
begin clrscr; repeat write(‘x,e,m: ‘); readln(x,e,m);
iter(x,e,m); writeln(‘x=’,x:6:4); until readkey = #27;
end.
После трансляции программы необходимо задать: начальное приближе-
ние, погрешность нахождения корня и ограничение на количество итераций.
При использовании метода хорд необходимо знать отрезок [a, b], на кото-
ром функция F(x, p
1
,p
2
,…) меняет знак (Рис.3.2).
a
b
c
0
c
1
c
2
0
x
y
Рис.3.2 Иллюстрация метода хорд
y = F(x)
A
B
B
1
B
2
C