Griffiths D.F., Higham D.J. Numerical Methods for Ordinary Differential Equations: Initial Value Problems
Подождите немного. Документ загружается.

76 6. Linear Multistep Methods—III
Example 6.1
Use Euler’s method to solve the IVP (see Example 1.9)
x
0
(t) = −8x(t) − 40(3e
−t/8
− 1), x(0) = 100.
We know that the exact solution of this problem is given by
x(t) =
1675
21
e
−8t
+
320
21
e
−t/8
+ 5.
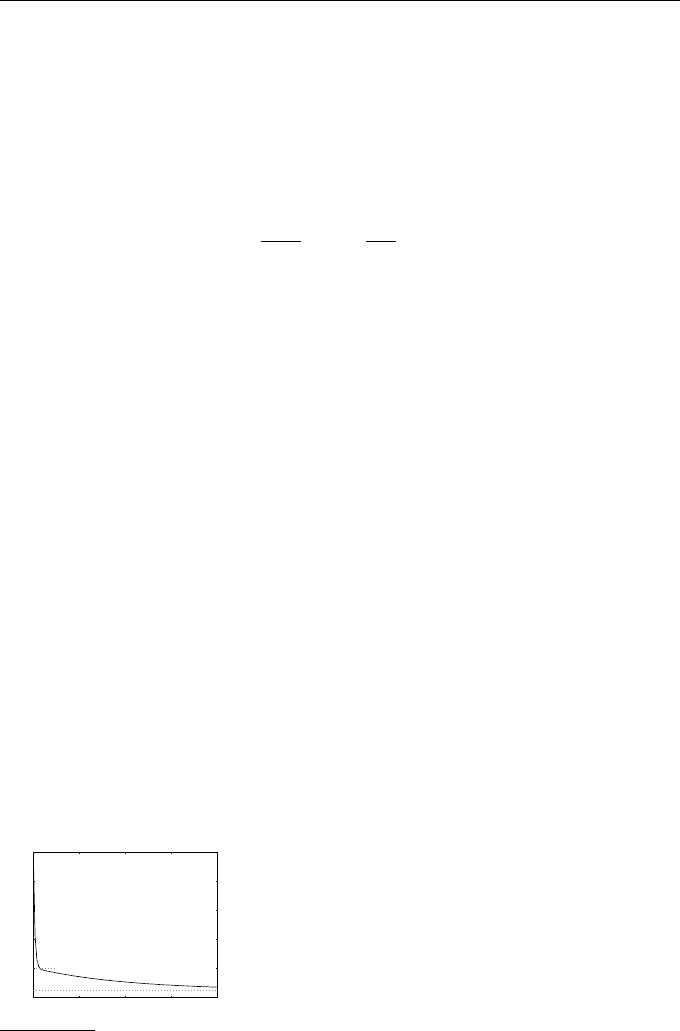
This function is shown in Figure 6.1. The temperature x(t) drops quite rapidly
from 100
◦
C to room temperature (about 20
◦
C) and then falls slowly to the
exterior temperature (about 5
◦
C).
Turning now to the numerical solution, Euler’s method applied to this ODE
gives
x
n+1
= (1 − 8h)x
n
+ h
120e
−t
n
/8
+ 40
, n = 0, 1, 2, . . . ,
with t
n
= nh and x
0
= 100.
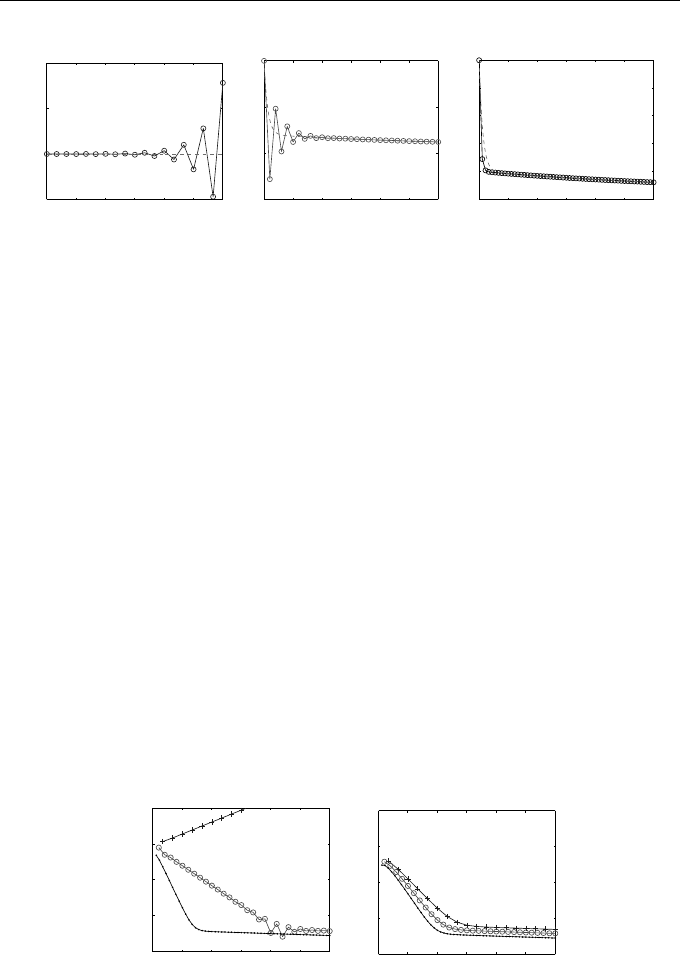
The leftmost graph in Figure 6.2 shows x
n
versus t
n
when h = 1/3. The nu-
merical solution has ever-increasing os cillations—a classic symptom of numeri-
cal instability—reaching a maximum amplitude of 10
6
. The numerical solution
bears no resemblance to the exact solution shown in Figure 6.1.
Reducing h (slightly) to 1/5 has a dramatic effect on the solution (middle
graph): it now decays in time while continuing to oscillate until about t ≈ 2,
after which point it becomes a smooth curve.
When h is further reduced to 1/9 the solution rese mbles the exact solution,
but the solid and broken curves do not become close until t ≈ 0.5.
In Figure 6.3 we plot the GEs (GE) |x(nh) − x
n
| on a log-linear sc ale.
1
The linear growth of the GE on this scale for h = 1/3 suggests exponential
growth. In contrast, for h = 1/5, the error decays exponentially over the interval
0 4 8 12 16
0
20
40
60
80
100
t
u(t)
Fig. 6.1
The exact solution to Example 6.1
1
If the GE were to vary exponentially with n, e
n
= c r
n
, then log e
n
= n log r+log c
and a graph of log e
n
versus n would be a straight line with slope log r . When r > 1
the slope would be positive, corresponding to exponential growth, while the slope
would be negative if 0 < r < 1, corresponding to exponential decay.
6.1 Absolute Stability—Motivation 77
1 2 3 4 5 6
−5
0
5
10
x 10
5
t
n
x
n
1 2 3 4 5 6
−50
0
50
100
t
n
x
n
1 2 3 4 5 6
0
20
40
60
80
100
t
n
x
n
Fig. 6.2 Solutions to Example 6.1 using Euler’s method with h = 1/3 (left),
h = 1/5 (middle) and h = 1/9 (right). The exact solution of the IVP is shown
as a broken curve
0 ≤ t ≤ 4 where it reaches a level of about about 10
−3
. Were we to be interested
in an accuracy of about 1
◦
C, this would be achieved at around t = 1.8 h.
For h = 1/9 there is a more rapid initial exponential decay of the error until
it, too, levels out, at a similar value of about 10
−3
at t = 1.3 h.
The theory that we shall present below can be used to show (see Exam-
ple 6.7) that Euler’s method suffers a form of instability for this IVP when
h ≥ 1/4; this is clearly supported by the numerical evidence we have pre-
sented. This is typical: Euler’s me thod is of no practical use for problems with
exponentially decaying solutions unless h is small enough. Furthermore, when
h is chosen small enough to avoid exponential growth of the GE, the accuracy
of the long-term solution may be much higher than is required.
This behaviour is caused by the exponent e
−8t
in the complementary func-
tion; had it been e
−80t
we would have needed to take h to be 10 times smaller
and we would have generated, as a consequence, a numerical solution that was
10 times more accurate. Thus, in this problem, we are forced to choose a small
value of h in order to avoid instability and, while this will produce a solu-
1 2 3 4 5 6
10
−4
10
−2
10
0
10
2
10
4
GE
t
n
1 2 3 4 5 6
10
−4
10
−2
10
0
10
2
10
4
GE
t
n
Fig. 6.3 The GEs associated with the solutions to Example 6.1 using Euler’s
method (left) and the backward Euler method (right) with h = 1/3 (+), h =
1/5 (◦), and h = 1/9 (•)
78 6. Linear Multistep Methods—III
tion of high accuracy, it is likely to be more accurate than required by the
application—the method is ineffic ient since we have expended more effort than
necessary when only moderate accuracy is called for.
We now contrast this behaviour with that of the backward Euler method:
x
n+1
= x
n
− 8hx
n+1
+ h
120e
−t
n+1
/8
+ 40
, n = 0, 1, 2, . . . ,
which is rearranged to read
x
n+1
=
1
1 + 8h
x
n
+ h(120e
−t
n+1
/8
+ 40)
, n = 0, 1, 2, . . . ,
with t
n+1
= (n + 1)h and x
0
= 100.
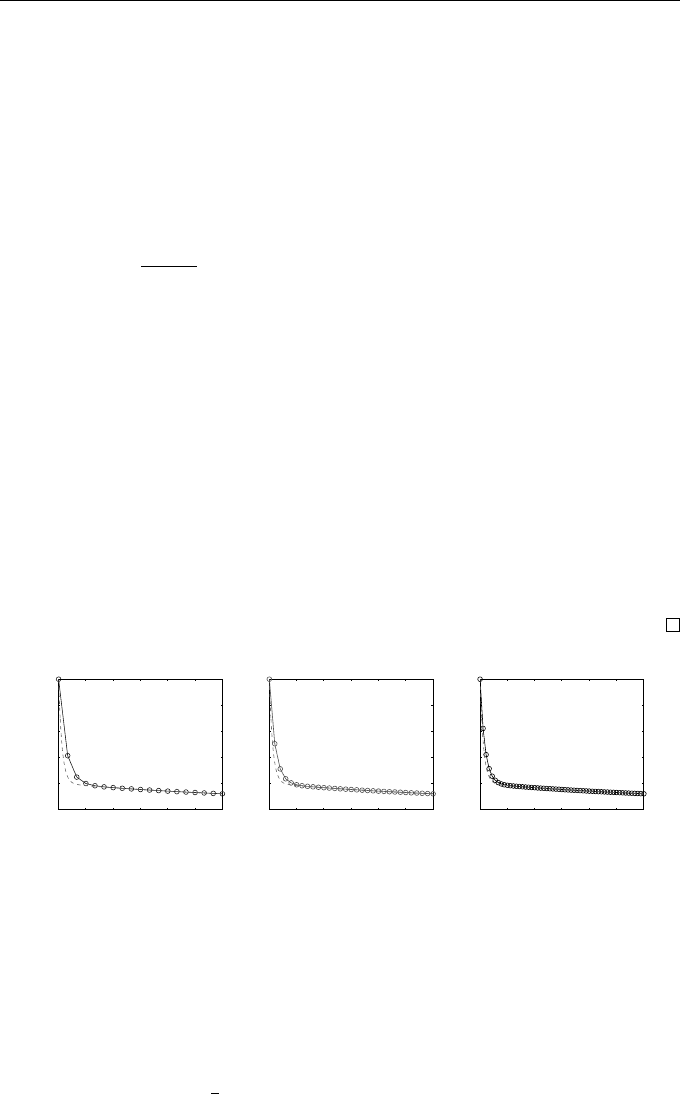
Solutions corresponding to h = 1/3, 1/5, 1/9 are shown in Figure 6.4. Com-
paring with Figure 6.2 it is evident that there are no oscillations and the nu-
merical solutions are reasonable approximations of the exact solution for each
of the values of h. The behaviour is such that small changes to h lead to small
changes in the numerical solutions (and associated GEs)—this is a desirable,
stable feature.
The local truncation errors for forward and backward Euler methods are
equal but opposite in sign. However, the way that these errors propagate is
clearly different. In this example the backward Euler method is much superior
to that of the Euler method since we are able to choose h on grounds of accuracy
alone without having to be concerned with exponentially growing oscillations
for larger values of h.
1 2 3 4 5 6
0
20
40
60
80
100
t
n
x
n
1 2 3 4 5 6
0
20
40
60
80
100
t
n
x
n
1 2 3 4 5 6
0
20
40
60
80
100
t
n
x
n
Fig. 6.4 Solutions to Example 6.1 using the backward Euler method with
h = 1/3 (left), h = 1/5 (middle), and h = 1/9 (right). The exact solution of
the IVP is shown as a broken curve
Example 6.2
Use the forward and backward Euler methods to solve the IVP (see (1.16))
x
0
(t) = −
1
8
(x(t) − 5 − 5025e
−8t
), x(0) = 100.
6.2 Absolute Stability 79
Compare the results produced with those of the previous example which has
the same exact s olution (see Example 1.9).
The forward and backward Euler me thods are, respectively,
x
n+1
= (1 −
1
8
h)x
n
− h(5 − 5025e
−8t
n
),
x
n+1
=
1
1 + h/8
x
n
− h(5 − 5025e
−8t
n+1
)
,
with x
0
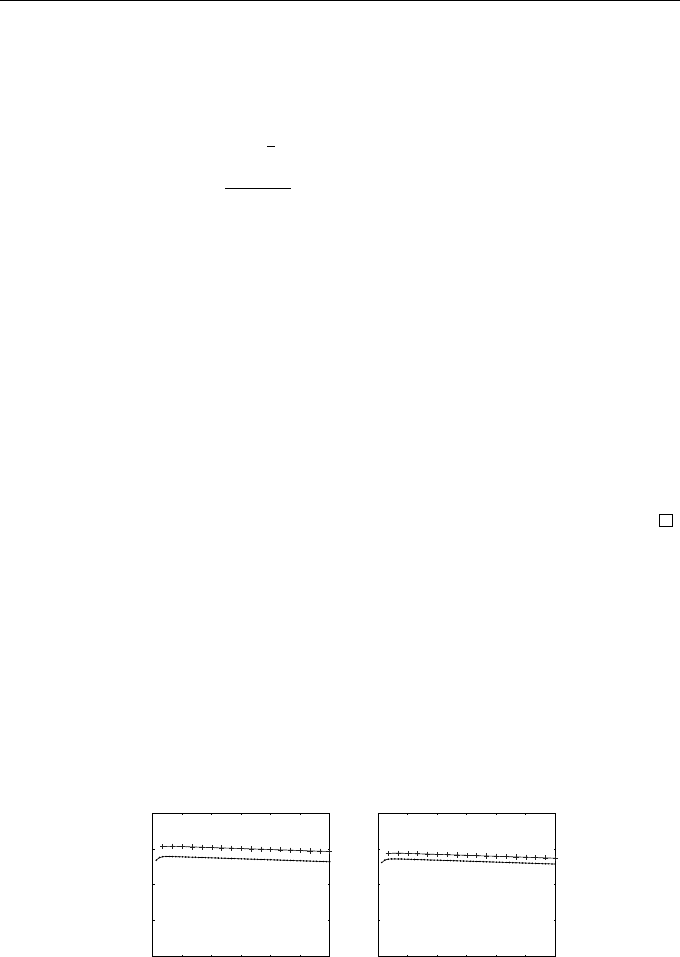
= 100 in each case. The GEs obtained when these methods are deployed
with h = 1/3 and 1/9 are shown in Figure 6.5. In both cases the GEs are
quite large over the interval of integration and decay slowly (proportional to
e
−t/8
). However, the most important feature in the present context is that
there is no indication of the exponential growth that we saw in the previous
example with Euler’s method with h = 1/3. In this example the forcing function
decays rapidly relative to the solutions of the homoge neous equation (e
−8t
versus e
−t/8
), whereas the roles are reversed in Example 6.1. This suggests
that the exponentially growing oscillations observed in Figure 6.2 with h = 1/3
are associated with rapidly decaying solutions of the homogeneous equation.
This is the motivation for studying homogeneous equations in the remainder
of this chapter.
6.2 Absolute Stability
The numerical results for Examples 6.1 and 6.2 lead us to absolute stability
theory, in which we examine the effect of applying (convergent) LMMs to the
model scalar problem
x
0
(t) = λx(t), (6.1)
1 2 3 4 5 6
10
−4
10
−2
10
0
10
2
10
4
GE
t
n
1 2 3 4 5 6
10
−4
10
−2
10
0
10
2
10
4
GE
t
n
Fig. 6.5 The GEs associated with the solutions to Example 6.2 using Euler’s
method (left) and the backward Euler method (right) with h = 1/3 (+) and
h = 1/9 (•)

80 6. Linear Multistep Methods—III
in which λ may be complex
2
and has negative real part: <(λ) < 0. The general
solution has the form x(t) = c e
λt
in which c is an arbitrary constant. Hence,
x(t) → 0 as t → ∞, regardless of the value of c.
Our aim is to determine those LMMs which, when applied to (6.1), give
solutions {x
n
} that also tend to zero as t
n
→ ∞ with a given fixed step size
h. Note that this property is different from that used by convergence theory,
which also required the limit n → ∞, since h is now fixed. This notion has
proved, perhaps surprisingly, to be both important and useful over many years
and we formalize our aspirations by the following definition.
Definition 6.3 (Absolute Stability)
An LMM is said to be absolutely stable if, when applied to the test problem
x
0
(t) = λx(t) with <(λ) < 0 and a given value of
b
h = hλ,
3
its solutions tend to
zero as n → ∞ for any choice of starting values.
Our definition of absolute stability is motivated by the idea of asking for
the numerical method to reproduce the long-term behaviour of the model ODE
(6.1). However, from Section 5.3 it should be clear that this condition is very
similar to the requirement that the GE should be damped as time increases—
this is the property that we looked at in Example 6.1. Hence, absolute stability
is an important factor in the control of the GE. Applying the general two-step
LMM (see Equation (4.13)) to the ODE x
0
(t) = λx(t) we have
x
n+2
+ α
1
x
n+1
+ α
0
x
n
= hλ(β
2
x
n+2
+ β
1
x
n+1
+ β
0
x
n
),
which can be rearranged to give the two-step linear difference equation
(1 −
b
hβ
2
)x
n+2
+ (α
1
−
b
hβ
1
)x
n+1
+ (α
0
−
b
hβ
0
)x
n
= 0. (6.2)
This equation is relatively easy to analyse since it is a homogeneous linear
difference equation with constant coefficients (see Appendix D). It has solutions
of the form x
n
= ar
n
, where r is a root of the auxiliary equation
(1 −
b
hβ
2
)r
2
+ (α
1
−
b
hβ
1
)r + (α
0
−
b
hβ
0
) = 0. (6.3)
We denote the polynomial on the left-hand side by p(r). Notice that
p(r) = ρ(r) −
b
hσ(r).
2
The reason for allowing λ to be complex will become clear in Chapter 7 during
the application to systems of differential equations.
3
We introduce the single parameter
b
h since the parameters h and λ occur only as
the product hλ.
6.2 Absolute Stability 81
We refer to p(r) as the stability polynomial of the LMM; it is a polynomial of
degree 2 whose coefficients depend (linearly) on the parameter
b
h.
This stability p olynomial will have two roots, r
1
and r
2
, and so (6.2) will
have the general solution
x
n
= ar
n
1
+ br
n
2
,
for arbitrary constants a and b provided that r
1
6= r
2
.
4
In
order to have |x
n
| → 0
as n → ∞ for any choices of a and b, it is necessary to have |r
1
| < 1 and |r
2
| < 1,
i.e., the polynomial p(r) must satisfy the strict root condition (Definition 5.4).
This gives the following result.
Lemma 6.4
An LMM is absolutely stable for a given value of
b
h = λh if, and only if, its
stability polynomial p(r) satisfies the strict root condition (Definition 5.4).
An LMM will not, in general, be absolutely stable for every choice of
b
h, so we
are led to define the following.
Definition 6.5 (Region of Absolute Stability)
The set of values R in the complex
b
h-plane for which an LMM is absolutely
stable forms its region of absolute stability.
We must, therefore, address the question of whether, and for what values
of
b
h, the roots of p(r) satisfy |r| < 1. Cases where λ is real (and negative) are
easier to analyse so, for these, we define the following.
Definition 6.6 (Interval of Ab solute Stability)
The interval of absolute stability of an LMM is the largest interval of the form
R
0
= (
b
h
0
, 0), with
b
h
0
< 0, for which the LMM is absolutely stable for all real
values of
b
h ∈ R
0
.
The interval of absolute stability is found by looking at the intersection of
the region of absolute stability with the negative real
b
h axis.
4
The case of equality is unimportant since it could be countered by making a small
change to the value of h.
82 6. Linear Multistep Methods—III
Example 6.7
Find the region of absolute stability of Euler’s me thod: x
n+1
− x
n
= hf
n
.
Applied to x
0
(t) = λx(t) we have f
n
≡ f(t
n
, x
n
) = λx
n
so that
x
n+1
= x
n
+ hλx
n
= (1 +
b
h)x
n
.
This has stability polynomial p(r) = r − 1 −
b
h with the single root r
1
= 1 +
b
h.
The region of absolute stability is, therefore, the open disc |1 +
b
h| < 1 whose
boundary is the circle of radius 1 centred at
b
h = −1. To see this, let
b
h = bx + iby,
then the boundary equation |1 +
b
h|
2
= 1 leads to (bx + 1)
2
+ by
2
= 1.
If
b
h is real, the interval of absolute stability is given by
−1 < 1 +
b
h < 1,
which leads to
b
h ∈ (−2, 0). See Figure 6.6.
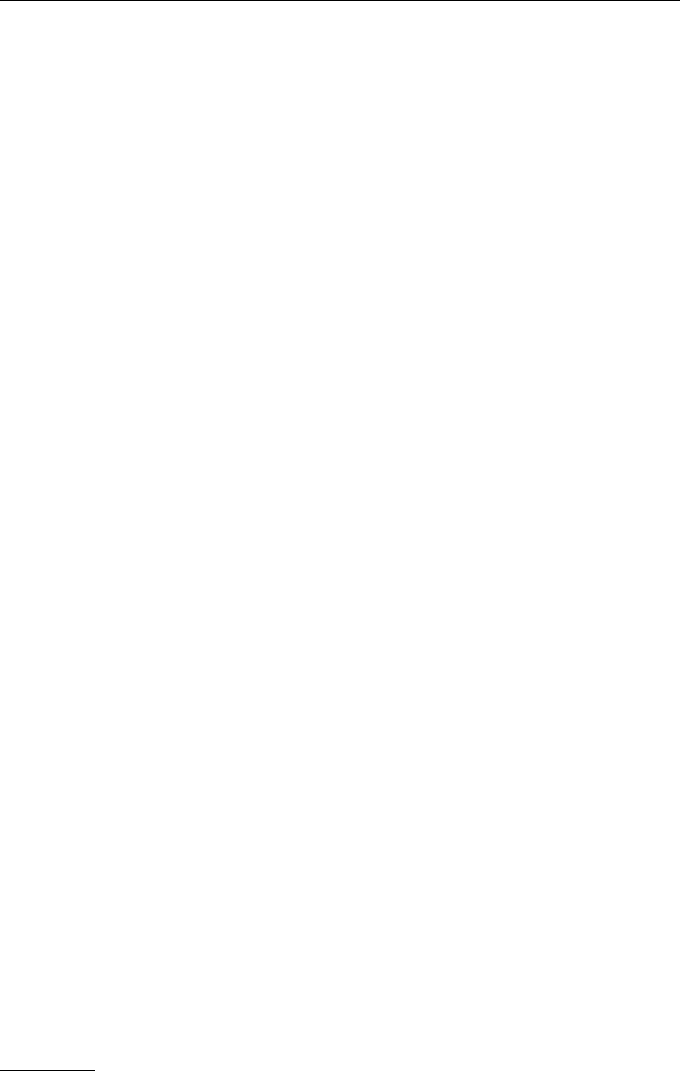
−3 −2 −1 0
−1.5
−1
−0.5
0
0.5
1
1.5
ℜ(
b
h)
ℑ(
b
h)
O
−3 −2 −1 0
−1.5
−1
−0.5
0
0.5
1
1.5
ℜ(
b
h)
ℑ(
b
h)
O
A
h
=
1
/
2
h
=
8
/
2
5
h
=
1
/
5
Fig. 6.6 The region of absolute stability for Euler’s method (shaded) and the
interval of absolute stability (broken line). On the right the line OA is the locus
of the points (−4h, 3h) for Example 6.8
If Euler’s method were to be applied to x
0
(t) = −8x(t), then
b
h = −8h and
absolute stability would require h < 1/4. Similarly, for x
0
= −80x, we would
have
b
h = −80h and absolute stability would require h < 1/40. This is the reason
that sensible results were computed with Euler’s method in Example 6.1 only
when h < 1/4.
Example 6.8
What is the largest value of h that can be used so that Euler’s method is
absolutely stable when used to solve the ODE x
0
(t) = λx(t) with λ = −3 + 4i?
6.2 Absolute Stability 83
In this case
b
h = h(−4 + 3i), |1 +
b
h| = |1 + h(−4 + 3i)|, and
|1 +
b
h|
2
= |1 + h(−4 + 3i)|
2
= (1 − 4h)
2
+ 9h
2
.
Since |1 +
b
h| < 1 is equivalent to |1 +
b
h|
2
− 1 < 0 we calculate
|1 +
b
h|
2
− 1 = h(−8 + 25h)
and conclude that the right-hand side will be negative if h < 8/25.
To interpret the situation geometrically, let
b
h = bx + iby, where bx = −4h
and by = 3h. As h varies, the locus of the points (−4h, 3h) is a straight line in
the complex
b
h-plane having equation by = −
4
3
bx—this is shown as the line OA
in Figure 6.6 (right). The indicated points on this line are at h = 2/5, 8/25
and h = 1/2. When h = 8/25 the point (−4h, 3h) lies on the boundary of the
region of stability.
Example 6.9
Find the region of absolute stability of the trapezoidal rule:
x
n+1
− x
n
=
1
2
h[f
n+1
+ f
n
].
The stability polynomial is
p(r) = r − 1 −
1
2
b
h(r + 1),
which has the single root
r
1
=
1 +
1
2
b
h
1 −
1
2
b
h
.
It may be verified (Exercise 6.1) that |r
1
| < 1 for all values of
b
h with negative
real part, so the region of absolute stability is the entire left half plane and the
interval of absolute stability is given by
b
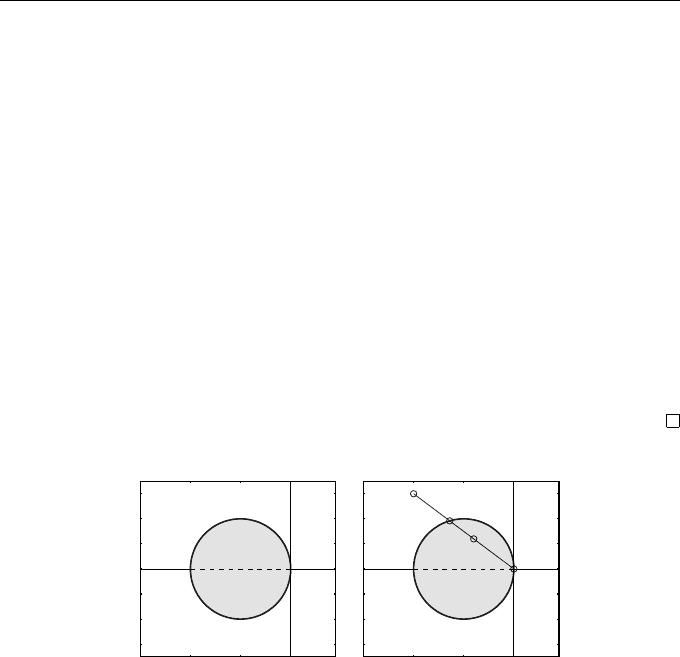
h ∈ (−∞, 0). See Figure 6.7.
ℜ(
b
h)
ℑ(
b
h)
O
Fig. 6.7 The region of absolute stability for the
trapezoidal rule (shaded) and the interval of ab-
solute stability (−∞, 0) (Broken line). The axes
have no scale because the region is infinite
84 6. Linear Multistep Methods—III
Thus, if the trapezoidal rule were to be applied to the problems in Exam-
ples 6.1 or 6.8, we would have absolute stability regardless of the size of h; this
means that h can be chosen on grounds of accuracy without regard to stability.
The following lemma is useful when the stability polynomial is quadratic
and
b
h is real.
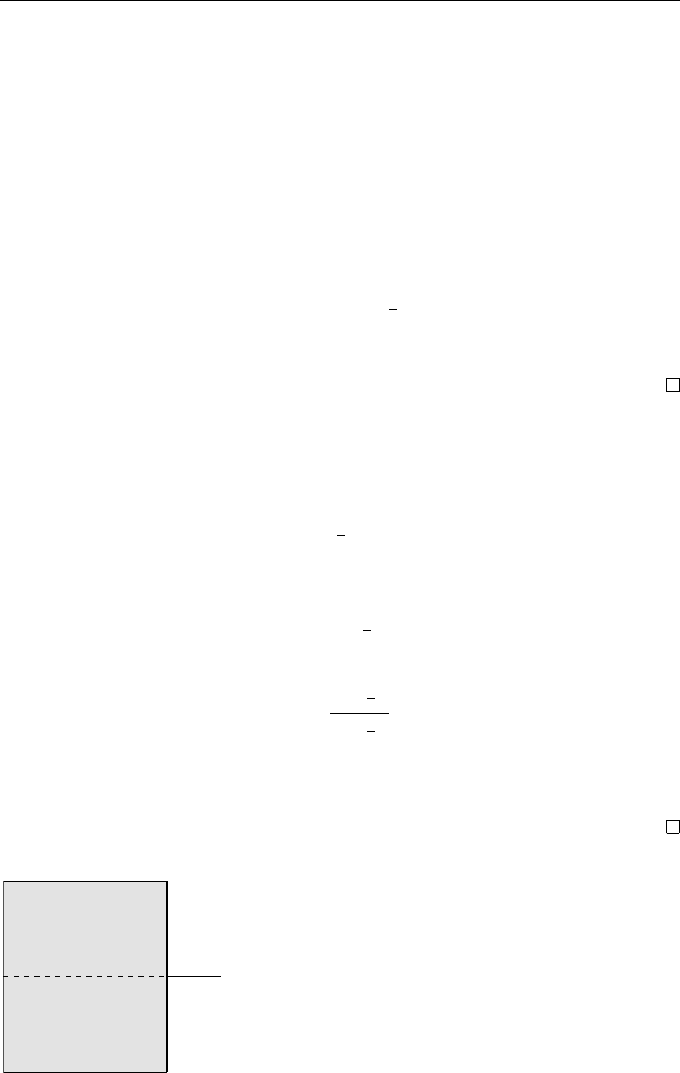
Lemma 6.10 (Ju ry Conditions)
The quadratic polynomial q(r) = r
2
+ ar + b, where a and b are both real
parameters, will satisfy the strict root condition of Definition 5.4 if, and only
if,
(i) b < 1, (ii) 1 + a + b > 0, and (iii) 1 − a + b > 0.
These are often called Jury conditions [40] and they define the triangular region
shown in Figure 6.8.
Proof
Using the quadratic formula, the roots of q(r) = r
2
+ ar + b are given by
r
1
, r
2
=
1
2
−a ±
p
a
2
− 4b
.
When a
2
< 4b the roots form a complex conjugate pair and, since b is equal
to the product of the roots, we find that b = r
1
r
2
= |r
1
|
2
= |r
2
|
2
. Hence, the
strict root condition holds if, and only if, b < 1. The inequality a
2
< 4b also
implies that (ii) and (iii) are satisfied (see Exercise 6.4).
In the case of real roots (a
2
≥ 4b), the root of largest magnitude R is
R = max{|r
1
|, |r
2
|} =
1
2
|a| +
p
a
2
− 4b
.
−2 0 2
−2
0
2
b = 1
a +
b
=
−1
a −
b
=
1
(2, 1)(−2, 1)
a
b
Fig. 6.8 The interior of the shaded
triangle shows the points (a, b) where
the polynomial q(r) = r
2
+ ar + b sat-
isfies the s trict root conditions. (Solu-
tions are complex for values of a and b
above the broken line: b = a
2
/4)

6.2 Absolute Stability 85
This is an increasing function of |a|, and R = 1 when |a| = 1 + b. Hence,
0 ≤ R < 1 if, and only if, 0 ≤ |a| < 1 + b. Also, since the strict root condition
implies that |r
1
r
2
| < 1, it follows that |b| < 1 and condition (i) must hold.
Combining the res ults for real and complex roots, we find that the strict
root condition is satisfied if, and only if, |a| − 1 < b < 1.
These conditions are equivalent to
q(0) < 1 and q(±1) > 0,
which may be easier to remember. To apply this lemma to the stability poly-
nomial (6.3) for a general two-step LMM it is first necessary to divide by the
coefficient of r
2
, so
a =
α
1
−
b
hβ
1
1 −
b
hβ
2
, b =
α
0
−
b
hβ
0
1 −
b
hβ
2
.
The denominators in these coefficients are necessarily positive for all
b
h ∈ R
0
(see Exercise 6.12), so the conditions q(±1) > 0 can be replaced by p(±1) > 0.
For explicit LMMs, β
2
= 0 and q(r) will coincide with the stability polynomial
p(r).
Example 6.11
Find the interval of absolute stability of the LMM:
x
n+2
− x
n+1
= hf
n
.
The stability polynomial is quadratic in r:
p(r) = r
2
− r −
b
h; (6.4)
since
b
h is real, the coefficients of this polynomial are real, and we can use
Lemma 6.10 to determine precisely when it satisfies the strict root condition.
Moreover, p(r) ≡ q(r), so the conditions for absolute stability are p(±1) > 0
and p(0) < 1. We find
p(0) < 1 : −
b
h < 1 ⇒
b
h > −1,
p(1) > 0 : −
b
h > 0 ⇒
b
h < 0,
p(−1) > 0 : 2 −
b
h > 0⇒
b
h < 2.
In order to satisfy all three inequalities, we must have −1 <
b
h < 0. So the
interval of absolute stability is (−1, 0).