Инструкция для оператора HEIDENHAIN - диалог с открытым текстом iTNC 530
Подождите немного. Документ загружается.

HEIDENHAIN iTNC 530 261
6.4 Движения по траектории – прямоугольные координаты
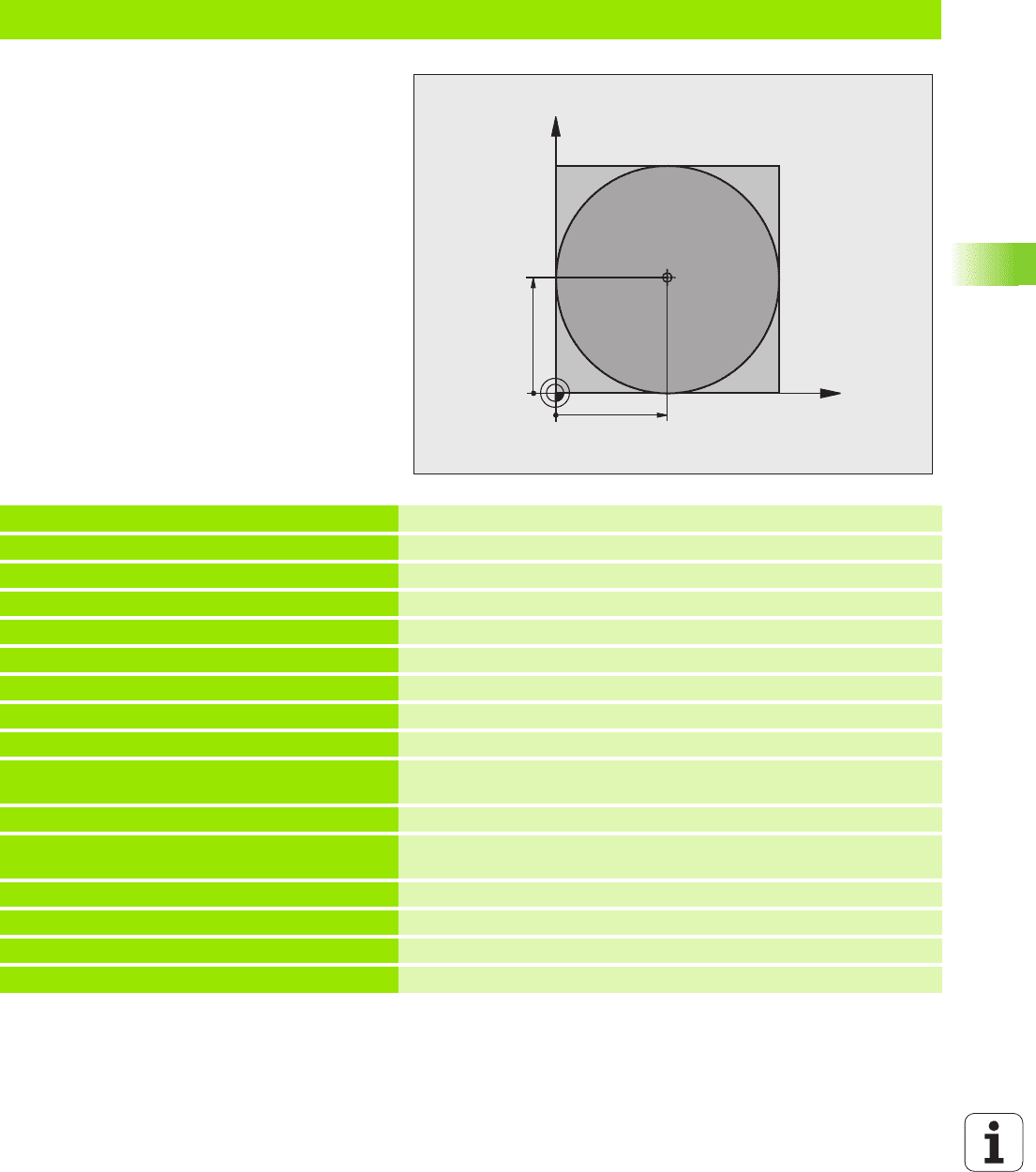
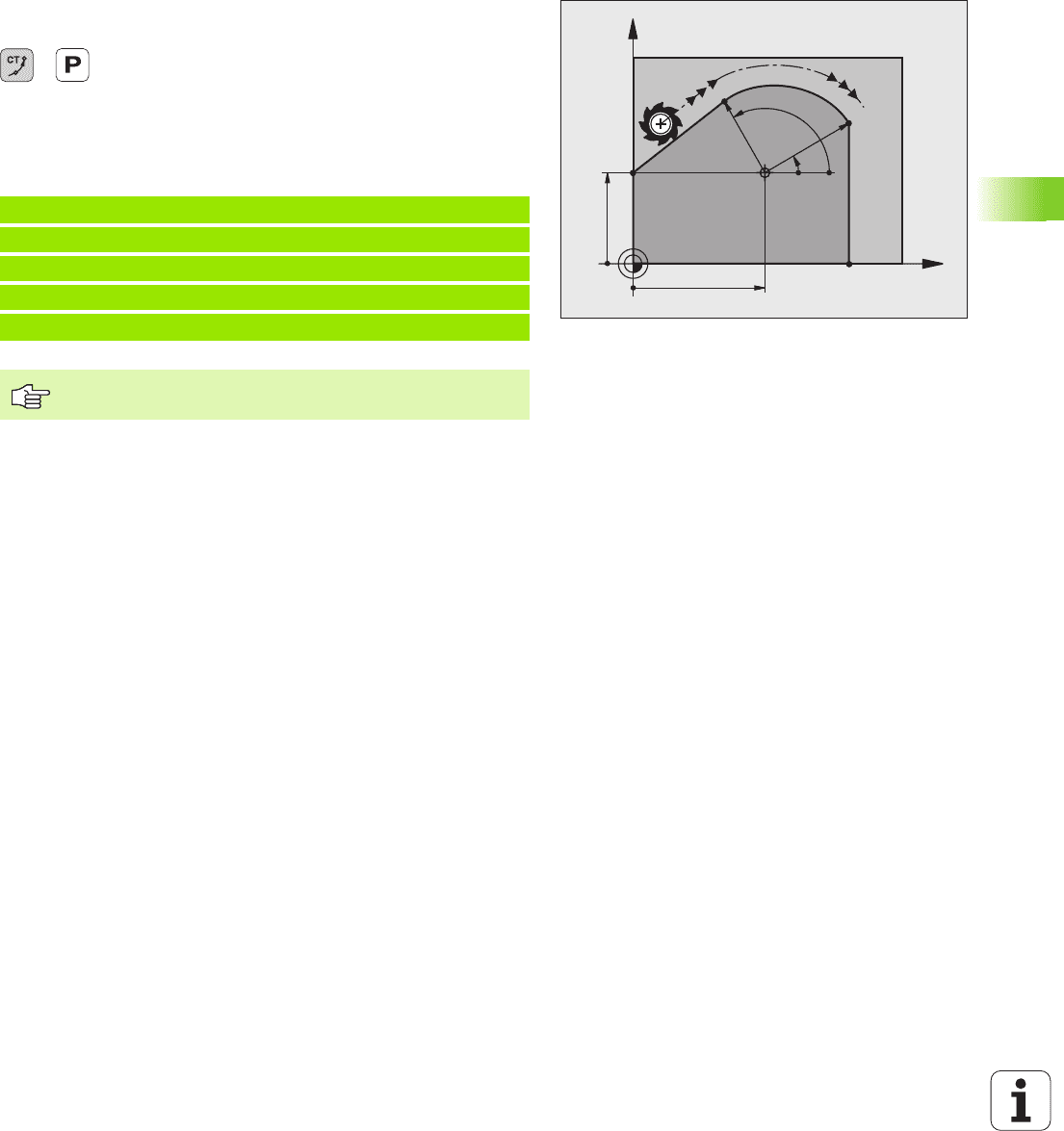
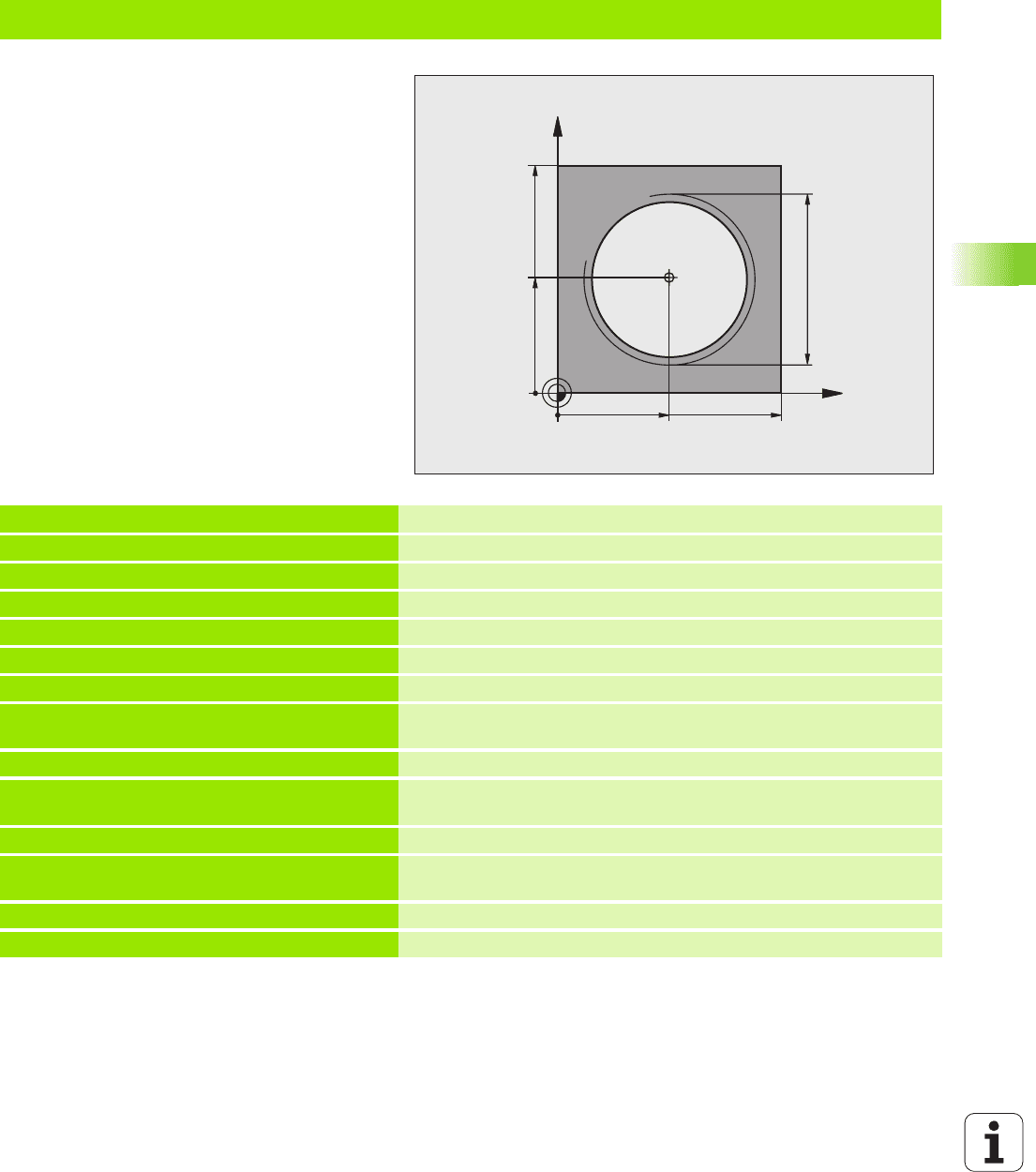
Пример: круг декартов
0 BEGIN PGM C-CC MM
1 BLK FORM 0.1 Z X+0 Y+0 Z-20
Дефиниция заготовки
2 BLK FORM 0.2 X+100 Y+100 Z+0
3 TOOL DEF 1 L+0 R+12.5
Определение инструмента
4 TOOL CALL 1 Z S3150
Вызов инструмента
5CCX+50Y+50
Определение центра окружности
6LZ+250R0FMAX
Отвод инструмента от загатовки
7 L X-40 Y+50 R0 FMAX
Предпозиционирование инструмента
8LZ-5R0F1000M3
Перемещение на глубину обработки
9 APPR LCT X+0 Y+50 R5 RL F300
Подвод к начальной точке круга по круговой траектории с
тангенциальным
примыканием
10 C X+0 DR-
Подвод к конечной точке окружности (=начальная точка
окружности)
11DEP LCTX-40Y+50R5F1000
Отвод от контура по круговой траектории с тангенциальным
примыканием
12 L Z+250 R0 FMAX M2
Свободный ход инструмента, конец программы
13 END PGM C-CC MM
X
Y
50
50
CC
262 6 Программирование: программирование контуров
6.5 Движения по траектории – полярные координаты
6.5 Движения по траектории –
полярные координаты
Обзор
С помощью полярных координат установливется позицию через
угол PA и расстояние PR к определённому раньше полюсу CC
(смотри „Основы”, страница 270).
Полярные координаты применяется преимущественно в случае:
позиций на дугах окружности
чертежей загатовок с данными угла,напр. при окружностях из
отверстий
Обзор функции траектории с полярными координатами
Функция
Функциональная
клавиша
траектории
Движение инструмента
Требуемые вводимые
данные
Страница
Прямая LP + Прямая Полярный радиус,
полярный угол конечной
точки прямой
Страница
264
Дуга окружности
CP
+ Круговая траектория вокруг
центра окружности / полюс
CC к конечной точке дуги
окружности
Полярный угол конечной
точки окружности,
направление вращения
Страница
264
Дуга окружности
CTP
+ Круговая траектория с
тангенциальным
примыканием к
предыдущему элементу
контура
Полярный радиус,
полярный угол конечной
точки окружности
Страница
265
Винтовая
линия
(Helix)
+ Перекрытие круговой
траектории с прямой
Полярный радиус,
полярный угол конечной
точки окружности,
координата конечной точки
на оси инструментов
Страница
266
HEIDENHAIN iTNC 530 263
6.5 Движения по траектории – полярные координаты
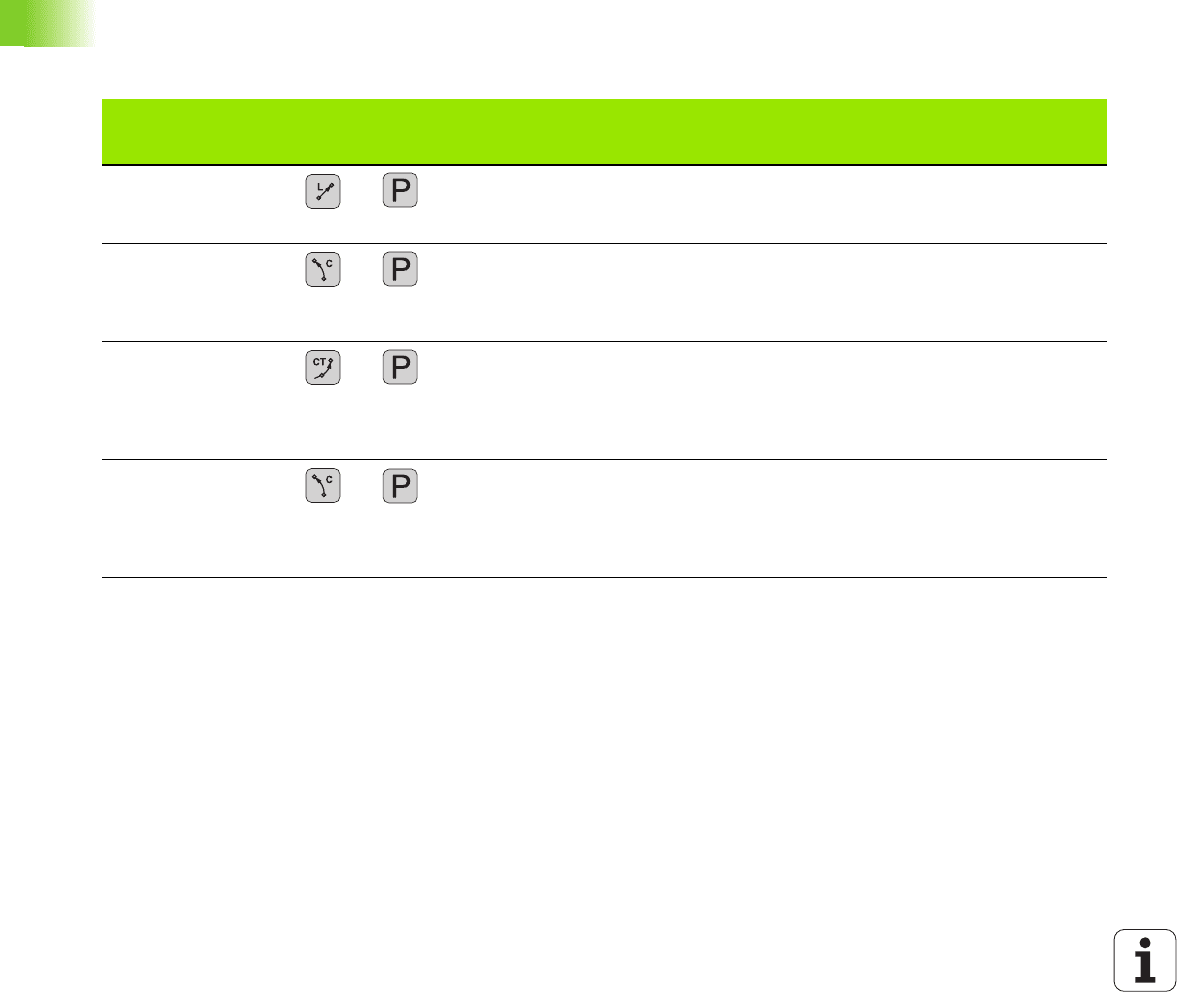
Начало полярных координат: полюс CC
Полюс CC можете назначить в любом месте в программе
обработки, до момента ввода позиций с помощью полярных
координат. При назначении полюса Вам надо поступать как при
программировании центра окружности CC.
Координаты CC: ввести прямоугольные
координаты для полюса или
Для ввода в программу программированной в
последнюю очередь позиции: не вводить
координат. Устанавить полюс CC, до
программирования полярных координат.
Программировать полюс CC только с помощью
прямоугольных координат. Полюс CC так долго
действителен, пока не определите нового полюса
CC.
ЧУ-кадры в качестве примера
X
Y
CC
X
CC
Y
C
C
12 CC X+45 Y+25
264 6 Программирование: программирование контуров
6.5 Движения по траектории – полярные координаты
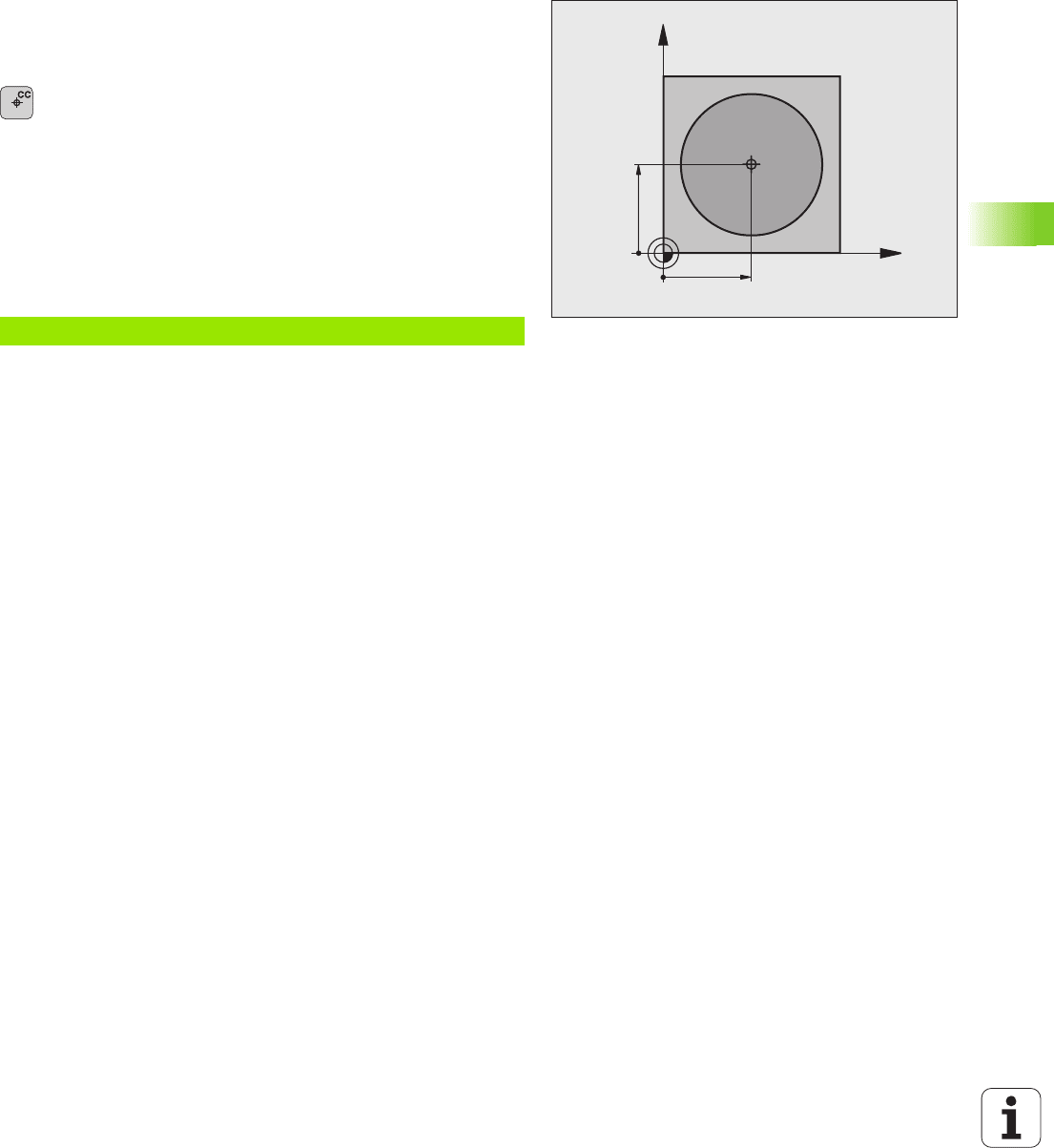
Прямая LP
Инструмент перемещается по прямой от своей актуальной
позиции к конечной точке прямой. Точка старта является
конечной точкой предыдущего кадра.
Полярные координаты-радиус PR: ввести
расстояние конечной точки прямой от полюса CC
Полярные координаты-угол PA: угловое
положение конечной точки прямой между –360° и
+360°
Знак числа PA определен базовой осью угла:
Угол между базовой осью угла и PR против часовой стрелки:
PA>0
Угол между базовой осью угла и PR по часовой стрелке: PA<0
ЧУ-кадры в качестве примера
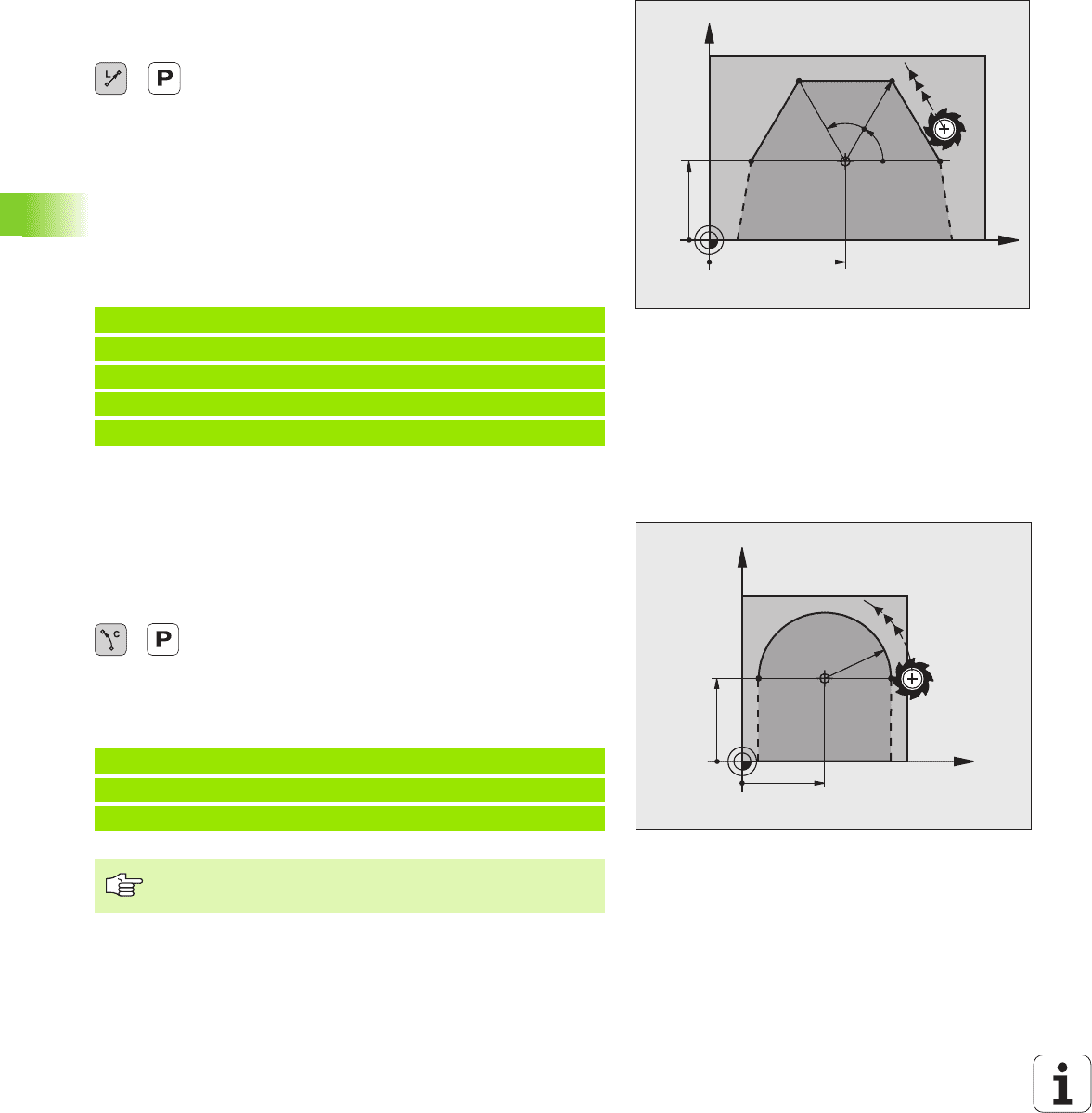
Круговая траектория CP вокруг полюса CC
Радиус с полярными координатами PR является одновременно
радиусом дуги окружности. PR установлен через расстояние
точки старта к полюсу CC. Программированная в последнюю
очередь позиция инструмента перед CP-кадром является точкой
старта круговой траектории.
Полярные координаты-угол PA: угловое
положение конечной точки круговой траектории
между –99999,9999° и +99999,9999°
Направление вращения DR
ЧУ-кадры в качестве примера
X
Y
45
25
60°
60°
30
CC
12 CC X+45 Y+25
13LPPR+30PA+0RRF300M3
14 LP PA+60
15 LP IPA+60
16 LP PA+180
X
Y
25
25
R20
CC
18 CC X+25 Y+25
19LPPR+20PA+0RRF250M3
20 CP PA+180 DR+
В случае инкрементных координат ввести тот же
самый знак числа для DR PA.
HEIDENHAIN iTNC 530 265
6.5 Движения по траектории – полярные координаты
Круговая траектория CTP с тангенциальным
примыканием
Инструмент перемещается по круговой траектории,
примыкающей тангенциально к предыдущему элементу контура.
Полярные координаты-радиус PR: расстояние
конечной точки круговой траектории от полюса Pol
CC
Полярные координаты-угол PA: угловое
положение конечной точки круговой траектории
ЧУ-кадры в качестве примера
X
Y
40
35
CC
30°
120°
R30
R25
12 CC X+40 Y+35
13 L X+0 Y+35 RL F250 M3
14 LP PR+25 PA+120
15 CTP PR+30 PA+30
16 L Y+0
Полюс CC не является центром окружности контура!
266 6 Программирование: программирование контуров
6.5 Движения по траектории – полярные координаты
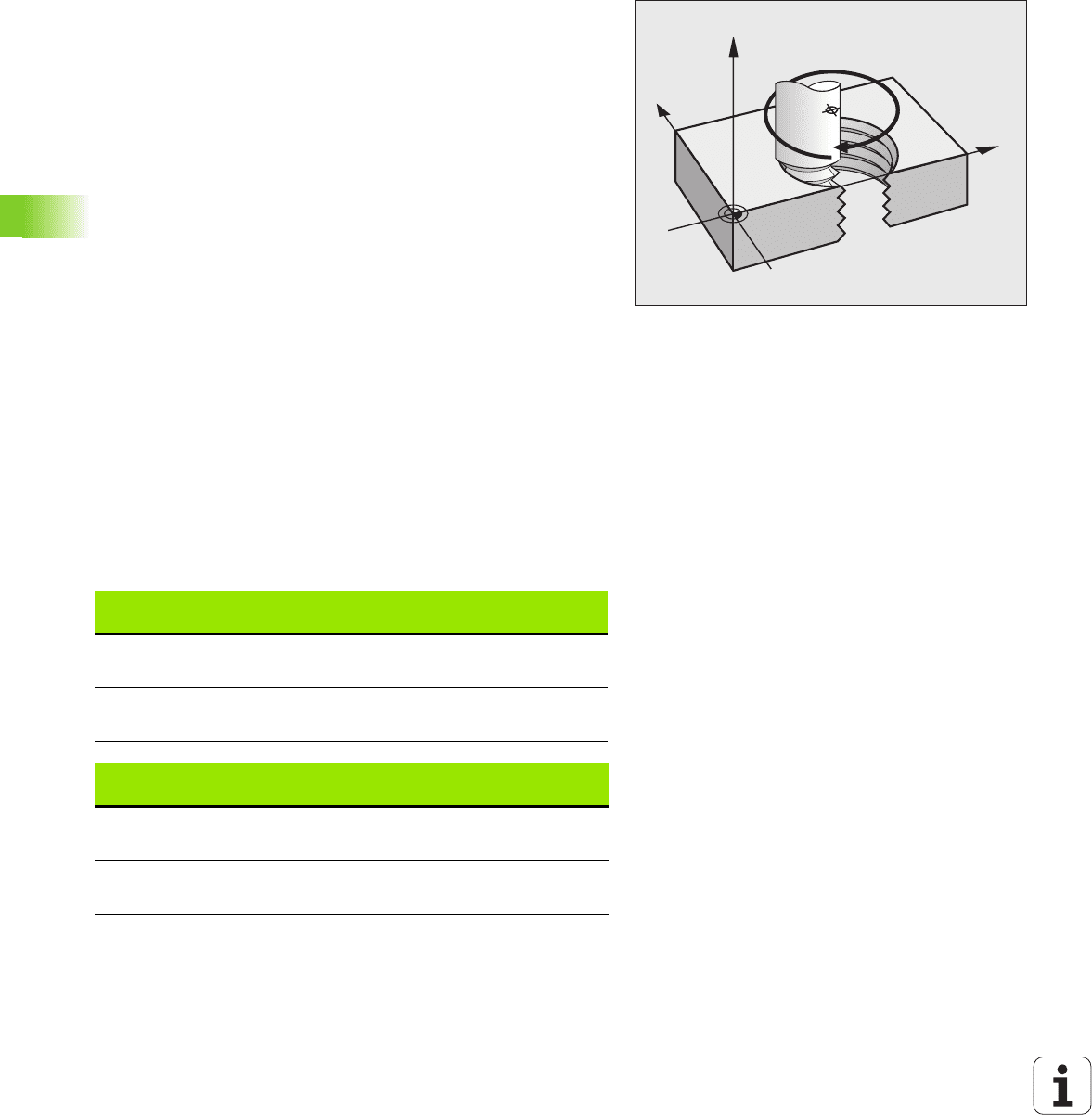
Винтовая линия (Helix)
Винтовая линия возникает из суперпозиции кругового движения и
пробегающего вертикально к нему движения прямой. Круговую
траекторию программируете на главной поверхности.
Движения по траектории для винтовой линии можно
программировать только с полярными координатами.
Применение
Внутренная и наружная резьба большого диаметра
Смазочные канавки
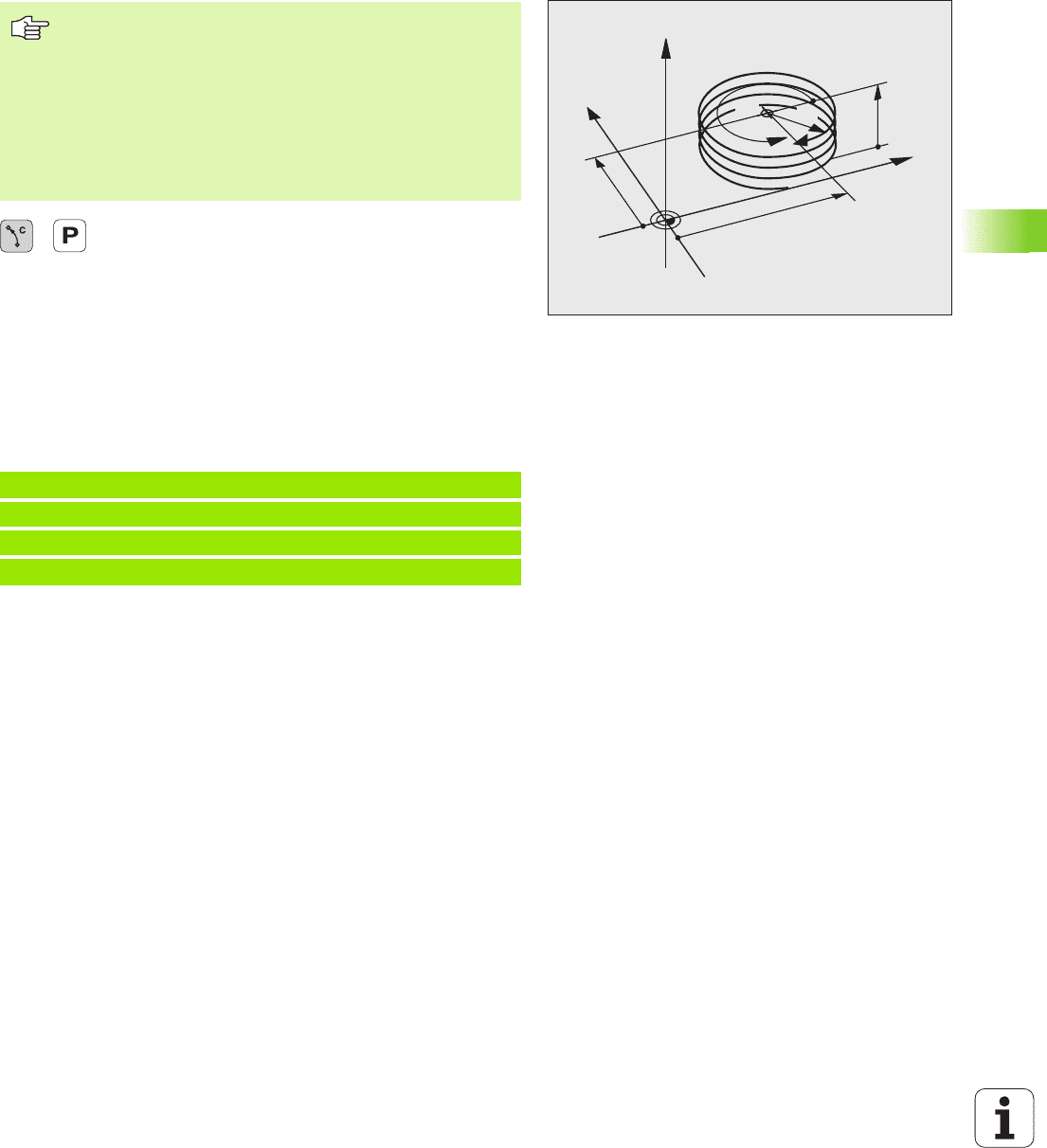
Расчёт винтовой линии
Для программирования требуются инкрементные данные полного
угла, под
которым инструмент перемещается по винтовой линии
и общей высоты винтовой линии.
Для расчёта в направлении фрезерования снизу вверх действует:
Исполнение винтовой линии
Таблица указывает соотношение рабочего направления,
направления вращения и коррекции на радиус для определённых
форм траектории.
Y
X
Z
CC
Количество витков n Витки резьбы + переполнение витков в
начале и конце резьбы
Общая высота h Шаг резьбы P x количество витков n
Инкрементный
общий угол IPA
Количество витков x 360° + угол для
начала резьбы + угол для переполнения
витков
Начальная
координата Z
Шаг резьбы P x (витки резьбы +
переполнение резьбы в начале резьбы)
Внутренная
резьба
Направлени
еобработки
Напр.вращения
Коррекция
нарадиус
правая
левая
Z+
Z+
DR+
DR–
RL
RR
правая
левая
Z–
Z–
DR–
DR+
RR
RL
Наружная
резьба
правая
левая
Z+
Z+
DR+
DR–
RR
RL
правая
левая
Z–
Z–
DR–
DR+
RL
RR
HEIDENHAIN iTNC 530 267
6.5 Движения по траектории – полярные координаты
Программирование винтовой линии
Полярные координаты-угол: ввести в
прирощениях полный угол, под которым
инструмент перемещается по винтовой линии.
После ввода угла выбирается ось
инструмента с помощью клавиши выбора оси.
Координату для высоты винтовой линии ввести с
помощью инкрементных значений
Направление вращения DR
Винтовая линия по часовой стрелке: DR–
Винтовая линия против часовой стрелки: DR+
ЧУ-пример: резьба M6 x 1 мм с 5 витками
Y
X
Z
25
40
5
270°
R3
CC
Ввести направление вращения DR и инкрементный
общий угол IPA c тем самым знаком числа, а то
инструмент может перемещаться по неправильной
траектории.
Для общего угла IPA можно ввести значение от –5400°
до +5400°. Если резьба имеет больше 15 витков, то
следует программировать винтовую линию в
повторении части программы (смотри „Повторения
части программы”, страница 588)
12 CC X+40 Y+25
13 L Z+0 F100 M3
14 LP PR+3 PA+270 RL F50
15 CP IPA-1800 IZ+5 DR-
268 6 Программирование: программирование контуров
6.5 Движения по траектории – полярные координаты
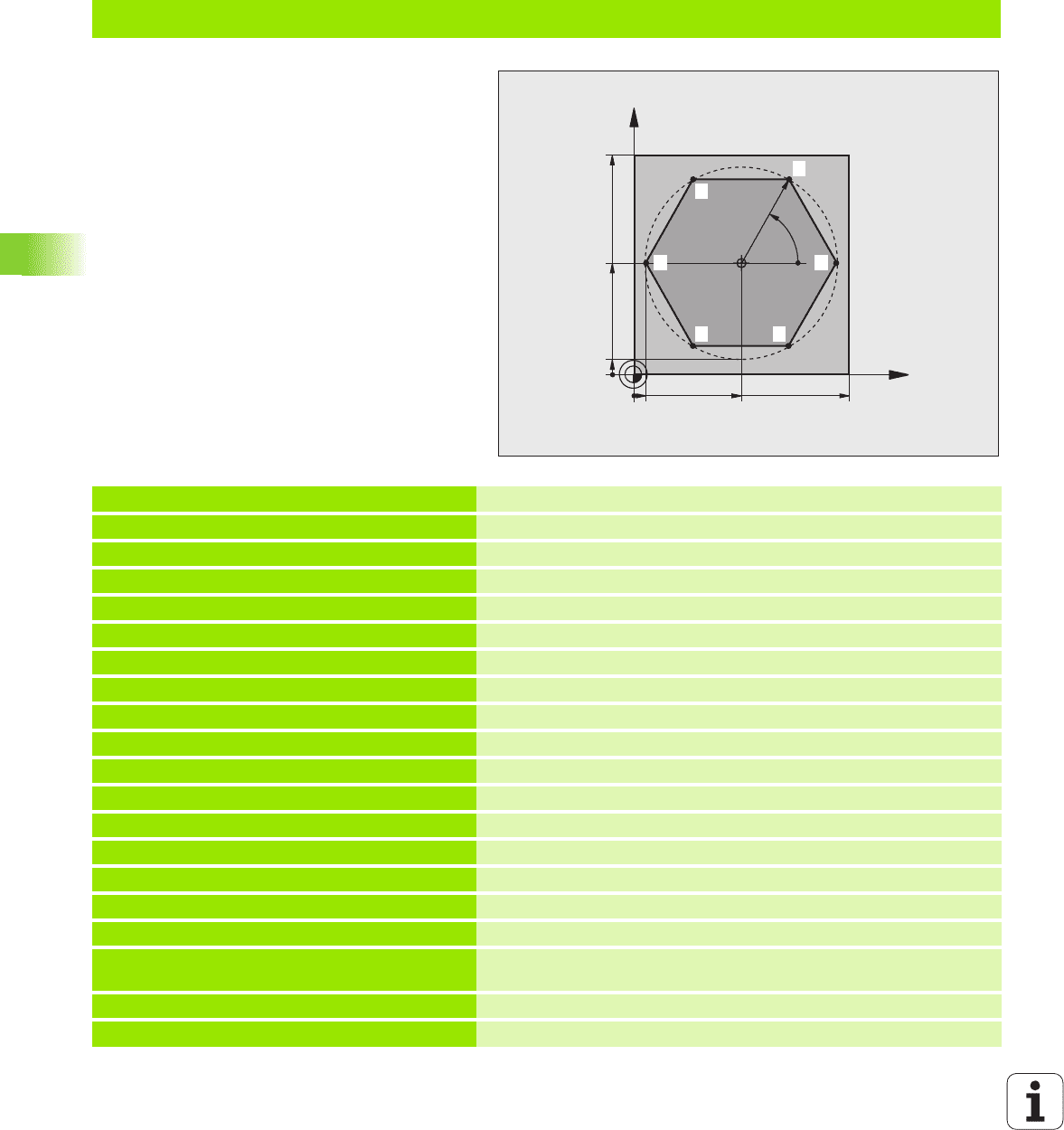
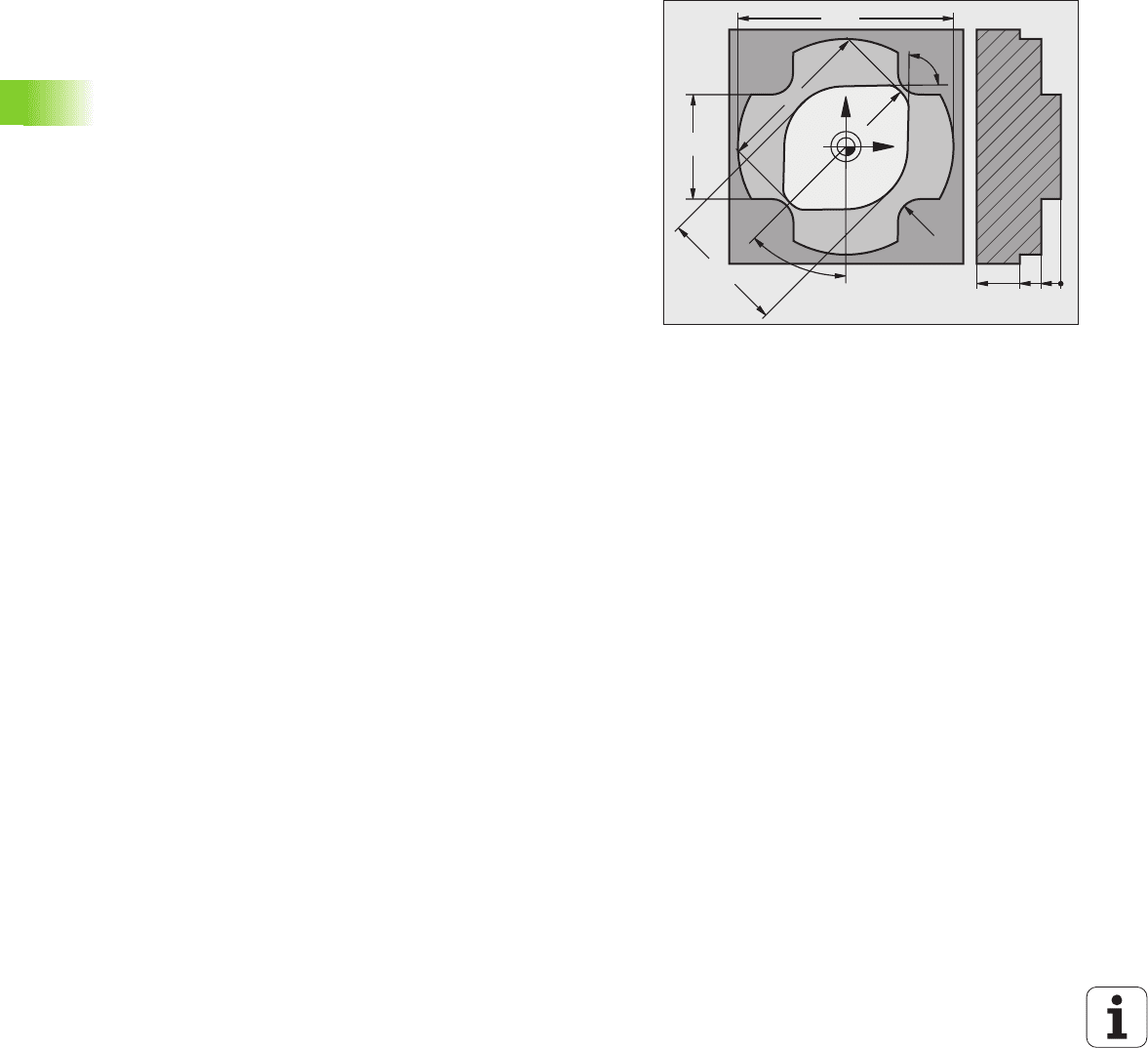
Пример: движение прямых полярно
0 BEGIN PGM LINEARPO MM
1BLK FORM 0.1ZX+0Y+0Z-20
Дефиниция заготовки
2BLK FORM 0.2X+100Y+100Z+0
3 TOOL DEF 1 L+0 R+7.5
Определение инструмента
4 TOOL CALL 1 Z S4000
Вызов инструмента
5CCX+50Y+50
Определение опорной точки для полярных координат
6LZ+250R0FMAX
Отвод инструмента от загатовки
7 LP PR+60 PA+180 R0 FMAX
Предпозиционирование инструмента
8LZ-5R0F1000M3
Перемещение на глубину обработки
9APPR PLCTPR+45PA+180R5RLF250
Наезд контура в точке 1 по окружности с
тагенциальным примыканием
10 LP PA+120
Подвод к точке 2
11 LP PA+60
Подвод к точке 3
12 LP PA+0
Подвод к точке 4
13 LP PA-60
Подвод к точке 5
14 LP PA-120
Подвод к точке 6
15 LP PA+180
Подвод к точке 1
16 DEP PLCT PR+60 PA+180 R5 F1000
Отвод от контура по окружности с тангенциальным
примыканием
17 L Z+250 R0 FMAX M2
Свободный ход инструмента, конец программы
18 END PGM LINEARPO MM
X
Y
50
100
50
CC
5
100
R45
60°
5
41
2
6 5
3
HEIDENHAIN iTNC 530 269
6.5 Движения по траектории – полярные координаты
Пример: Helix
0 BEGIN PGM HELIX MM
1 BLK FORM 0.1 Z X+0 Y+0 Z-20
Дефиниция заготовки
2 BLK FORM 0.2 X+100 Y+100 Z+0
3 TOOL DEF 1 L+0 R+5
Определение инструмента
4 TOOL CALL 1 Z S1400
Вызов инструмента
5LZ+250R0FMAX
Отвод инструмента от загатовки
6 L X+50 Y+50 R0 FMAX
Предпозиционирование инструмента
7CC
Приём последней программированной позиции в качестве
полюса
8LZ-12.75R0F1000M3
Перемещение на глубину обработки
9 APPR PCT PR+32 PA-
182 CCA180 R+2 RL F100
Подвод к контуру по окружности с тангенциальным
примыканием
10 CP IPA+3240 IZ+13.5 DR+ F200
Проезд Helix
11 DEP CT CCA180 R+2
Отвод от контура по окружности с тангенциальным
примыканием
12 L Z+250 R0 FMAX M2
Свободный ход инструмента, конец программы
13 END PGM HELIX MM
X
Y
50
50
CC
100
100
M64 x 1,5
270 6 Программирование: программирование контуров
6.6 Движение по траектории – Программирование разнообразных
контуров FK
6.6 Движение по траектории –
Программирование
разнообразных контуров FK
Основы
Чертежа загатовок, не содержащие требуемых ЧУ размеров,
имеют часто данные о координатах, которых не можно ввести с
помощью серых клавиш диалога. И так могут нпр.
известные координаты лежать на элементе контура или близко
него,
координаты относятся к другому элементу контура или
данные о направлении и данные прохода контура быть
известными.
Такие данные программируются непосредственно с помощью
программирование свободного контура FК. УЧПУ рассчитывает
контур на основании известных данных и поддерживает диалог
программирования с помощью интерактивной СК-графики.
Картина справа вверху показывает проставление размеров,
самых простых для ввода путем FK-программирования.
Y
X
051020
88.15°
¬36
45°
¬21
18
R4
28
R2.5