Лещенко А.И. Программирование и технологические процессы для станков с ЧПУ
Подождите немного. Документ загружается.


Министерство образования и науки Украины
Приазовский государственный технический университет
Кафедра «Технология машиностроения»
Лещенко А.И.
«Программирование и технологические процессы для
станков с ЧПУ»
Конспект лекций
для студентов специальностей «Технология машиностроения»,
Мариуполь 2005
Утверждено на заседании кафедры
технологии машиностроения
протокол № 4 от 20 декабря 2004 года
Рекомендовано методическим советом
механико-машиностроительного факультета
- 2 -
2
Введение.
Развитие числового программного управления (ЧПУ) имеет примерно
тридцатилетнюю историю. Этот процесс протекает столь стремительно, что в
технике не так просто найти другой аналогичный в этом смысле пример.
Сменялись поколения электронных устройств ЧПУ, принципиально изменялись
их возможности, что накладывало отпечаток на конструкцию и функциональ-
ную связь с самим объектом управления – металлорежущим станком.
Основное свойство станков с ЧПУ – это их гибкость, т. е. скорость
переналадки, которая на порядок выше гибкости станков автоматов на основе
копиров, командаппаратов, путевых выключателей и пр.
В результате развития устройств ЧПУ, построенных по структуре ЭВМ,
созданы высокопроизводительные технологические модули, в состав которых
входят: многооперационный станок с автоматической сменой инструмента,
транспортно накопительная система, позволяющая производить замену детали
на заготовку, система контроля и регенерации отходов. Такие модули могут
работать в автономном режиме или встраиваться в автоматические линии.
Станки с ЧПУ позволяют производить обработку деталей с большой
концентрацией инструментальных переходов, что повышает точность деталей
(обработка с одной технологической базы), снижает Тшт. на операцию и
уменьшает длину транспортных потоков. Все эти качества позволяют
предположить увеличение объема обработки на станках с ЧПУ в условиях
перехода к рыночной экономике.
1.Конструктивные и технологические особенности cтанков с ЧПУ.
1.1 Классификация станков с ЧПУ.
Металлорежущие станки с ЧПУ можно классифицировать по различным
признакам.
В зависимости от вида основных операций обработки станки подразделяют-
ся на технологические группы:
♦ токарные,
♦ фрезерные,
♦ сверлильные,
♦ сверлильно – фрезерно - расточные,
♦ шлифовальные,
♦ многооперационные.
По количеству используемого инструмента, станки с ЧПУ подразделяются:
♦ многоинструментальные , с числом автоматически сменяемых
инструментов до 12, как правило станки с инструментальной револьверной
головкой;
♦ многооперационные, с числом автоматически сменяемых инструментов
более 12, снабженные специальным инструментальным магазином цепного или
барабанного типа.
По принципу управления движением, различают четыре группы станков, при
этом к основному обозначению станка, добавляется соответствующий индекс:
♦ Ф1 – станки с цифровой индикацией положения рабочих органов.
Такие станки можно называть программыми только условно.
- 3 -
3
♦ Ф2 – станки с позиционной системой ЧПУ. Программируется только
выход на позицию обработки на ускоренном ходу, и движение на
рабочей подаче по одной координате. Обычно это сверлильные станки.
♦ Ф3 – станки с контурной системой ЧПУ. Программируется траектория
перемещения на рабочей подаче по контуру. Обычно это фрезерные
станки.
♦ Ф4 – станки с комбинированной системой ЧПУ, имеющей признаки
систем Ф1,Ф2,Ф3. Такой системой управления, как правило, оснащены
многооперационные станки.
По числу координат управления, наиболее распространенные, двух и трех
координатные станки. Токарные станки имеют двух координатную систему
управления. Станки, имеющие три координаты управления, но возможность
одновременного управления только по двум координатам, обычно называют
станками с числом координат управления 2,5.
Индексы отражающие конструктивные особенности связанные с автомати-
ческой сменой инструмента:
♦ Р – смена инструмента поворотом револьверной головки. (16K20РФ3)
♦ М – смена инструмента из инструментального магазина. (ИР500МФ4)
Следует отметить, что некоторые станкозаводы имеют свое обозначения
моделей станков, например Горьковский завод фрезерных станков – ГФ.
1.2 Конструктивные особенности многооперационных станков.
Станки данного типа, имеют второе название – обрабатывающий центр.
Позволяют эффективно использовать принцип постоянства баз, концентрации
инструментальных переходов, осуществлять обработку многими инструментам
с одного установа. Для многооперационных станков характерны компановки
двух типов: с горизонтальным шпинделем - поворотным столом и с вертикаль-
ным шпинделем - крестовым столом. Станки оснащается инструментальным
магазином, из которого при помощи устройства автоматической смены,
инструменты попадают в рабочую позицию. Для перекрытия вспомогательного
времени, затрачиваемого на установку и снятие деталей машинным временем,
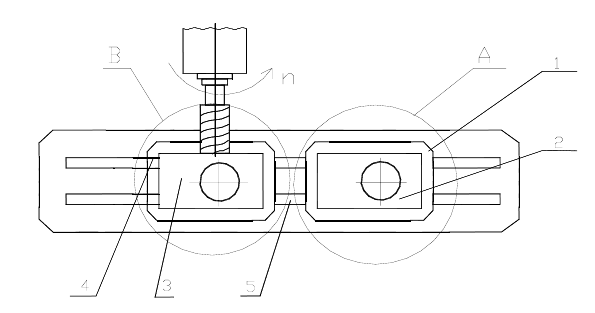
станки этого типа часто комплектуются устройством смены палет (рис. 1.1).
Рис.1.1 Устройство смены палет.
В поз.А на палете 1 базируется и закрепляется заготовка 2, в то время, когда в
поз.В происходит обработка заготовки 3 на палете 4. По окончании обработки
палета 4 с деталью 3 и палета 1 с заготовкой 2 смещается влево, по
- 4 -
4
направляющим станины 5. В рабочую зону станка попадает заготовка 2 а с
палеты 4 снимается деталь и на нее устанавливается новая заготовка.
Современные станки с ЧПУ, оснащаются приводом главного движения с
верхним пределом частоты вращения до 4000об/мин, скоростей рабочих подач
до 3000мм/мин и быстрого хода до 10м/мин, дискретой перемещения до .001мм.
Дискретой перемещения по данной координатной оси, называется
минимально возможное перемещение по этой оси.
1.3 Конструкторско – технологические особенности станков с ЧПУ.
Применение высокомоментных двигателей постоянного тока в приводах
станков, имеет следующие преимущества:
1.Сокращает или устраняет механические передачи в цепях исполнитель-
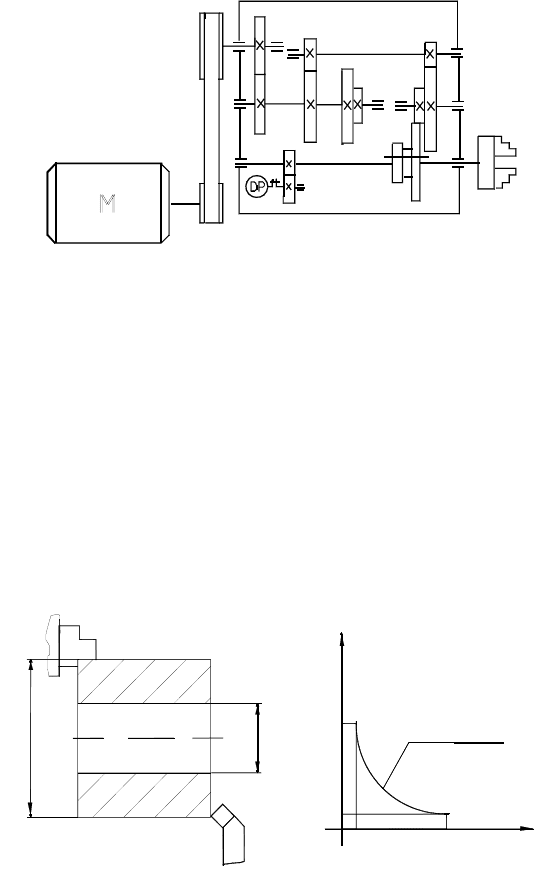
механизмов. Структурная схема привода главного движения, токарного станка
16К20РФ3, имеет вид представленный на рис.1.2. Привод имеет три диапазона
регулирования (22.4...355об/мин), (63...900об/мин), (160...2240об/мин) с
плавным изменением частоты вращения, в пределах каждого диапазона.
Рис.1.2. Структурная схема привода главного движения.
Токарные станки с ЧПУ не имеют ходового винта. При многопроходном
нарезании резьбы, попадение резца в виток резьбы обеспечивает датчик резьбо-
нарезания DP, который дает сигнал разрешающий движение резания только
при определенном угловом положении шпинделя. Этот датчик действует и при
выполнении команды “ориентированный останов шпинделя” - М19.
В сравнении с не программным оборудованием, видно упрощение конструк-
ции шпиндельного узла станка, а следовательно снижение его стоимости и
ремонтной сложности.
2. Приводы на основе двигателей постоянного тока позволяют плавно изме-
нять величину подачи, обрабатывать с постоянной V
РЕЗ
. Например (рис.1.3)
Рис.1.3 Изменение частоты вращения при обработке с V
РЕЗ
=const
D2
D1
n1
D2
D1
D
n=f(D)
n2
n
- 5 -
5
при уменьшении диаметра обработки с D1 до D2, частота вращения двигателя
привода главного движения увеличивается по гиперболическому закону с n1 до
n2, поддерживая V
рез
=const.
Поэтому в управляющих программах (УП) для современных станков, может
указываться не численное значение частоты вращения шпинделя, а значение
оптимальной для данной обработки детали V
рез
, которое система будет поддер-
живать постоянной автоматически.
В конструкцию многооперационных станков заложены следующие свойства,
позволяющие их функционирование в автономном режиме:
1.Контроль износа или поломки режущего инструмента по теоретическому
времени стойкости инструмента или по предельному М
кр
на валу электродвига-
теля привода главного движения. Первый предполагает смену инструмента по
истечению времени равного периоду его стойкости, однако он не учитывает
влияние случайных факторов на процесс резания. Второй более оптимальный,
однако и более дорогостоящий.
2.Система смены инструмента реализуется применением инструментальных
магазинов, емкость которых достаточна для обработки детали в течении всей
операции.
3.Автоматическая смена деталей на заготовки при помощи столов- спутников
или палет.
4.Уборка и смыв стружки, обильное охлаждение при герметичной защите
зоны резания специальными кожухами.
Повышенная точность многооперационных станков достигается за счет
конструктивных элементов оборудования, особых требований к качеству
сборки. При сдаче в эксплуатацию станка и регламентных проверках на техно-
логическую точность определяются величины люфтов по двум направлениям
(+) и (–) каждого координатного перемещения и записывается в память УЧПУ в
качестве «параметров станка». При выполнении программных перемещений
система автоматически учитывает эти величины.
1.4 Регулируемый привод станков с ЧПУ.
Регулируемый привод применяют в механизмах главного движения станков и
следящем приводе подач. Основой привода является двигатель постоянного
тока с независимым возбуждением. Особенностью этих приводов является
широкий диапазон регулирования частоты вращения от 1:1000 до 1:50000, за
счет изменения напряжения в цепи якоря при неизменном возбуждении, что
обеспечивает максимально допустимый крутящий момент, на всем диапазоне
регулирования. Это позволяет выполнять не только рабочие движения подачи,
связанные с технологическим процессом обработки, но также и быстрые
установочные перемещения без применения многоступенчатых механических
передач. Совершенный регулируемый привод имеет минимальную частоту
вращения до 1об/мин и обладает высоким быстродействием при переходе с
одной установленной частоты вращения на другую. Рассмотрим структурную
схему, регулируемого следящего привода подач (рис.1.4).
УЧПУ считывает управляющую программу (УП) с программоносителя и генерирует два
сигнала управления – по скорости перемещения F (подачи) и по положению E
(величине перемещения). Эти сигналы поступают на блок тиристорного

- 6 -
6
управления – БТУ, который вырабатывает напряжение управления током якоря
М и обмоткой возбуждения ОВ двигателя постоянного тока.
Рис. 1.4 Регулируемый привод подач.
Крутящий момент М
КР
с ротора двигателя, через муфту и механическую пере-
дачу, поступает на ходовой вал Р который через шариковую пару винт-гайка
выполняет перемещение подвижного органа станка. Ротор двигателя М, датчик
обратной связи по скорости тахогенератор ТГ и тормоз ТР, обеспечивающий
практически мгновенный останов ротора, как правило соосны и собраны в
одном корпусе. Датчик обратной связи по положению D, типа «вращающийся
трансформатор” устанавливается на оси объекта регулирования
- ходового вала Р
Регулируемый привод работает по замкнутой схеме, в данном случае по
схеме с отрицательной обратной связью, и имеет два контура управления: по
скорости F и по положению E. ТГ вырабатывает напряжение F
ОС
прямо пропор-
циональное частоте вращения якоря двигателя, а D напряжение Е
ОС
пропорцио-
нальное величине координатного перемещения. Сигналы Fос и E
ОС
поступают
на элементы сравнения. Таким образом, происходит контроль «задания»,
определенного УЧПУ по управляющей программе (УП).
1.5 Привод главного движения
В приводах главного движения станков с ЧПУ, применяют регулируемые
приводы с двигателем постоянного тока и тиристорным преобразователем на-
пряжений. Необходимая мощность привода главного движения станка изменя-
ется в зависимости от частоты вращения шпинделя. При этом номинальная
мощность полностью не используется на высоких и низких частотах вращения.
На рис. 1.5 представлен график полезной мощности Р в зависимости от
частоты вращения n.
Рис.1.5 График полезной мощности
- 7 -
7
Анализируя график зависимости можно отметить, что примерно до половины
диапазона мощность Р возрастает пропорционально частоте вращения n, и регу-
лирование привода необходимо производить с постоянным крутящим моментом
М. Затем мощность достигает max и после этого незначительно снижается. На
этом участке привод нужно регулировать с постоянной, максимально допусти-
мой мощностью Р.
Таким образом для оптимизации обработки деталей с различной скоростью
резания, приводы главного движения станков выполняются по схеме двухзон-
ного регулирования.
1.6 Система координат станка.
Перемещения подвижных частей металлорежущих станков, не оснащенных
системами ЧПУ, контролируются визуально или с помощью упоров, копиров,
командаппаратов. Все перемещения рабочих органов станка, УЧПУ определяет
в системе координатной станка – СКС.
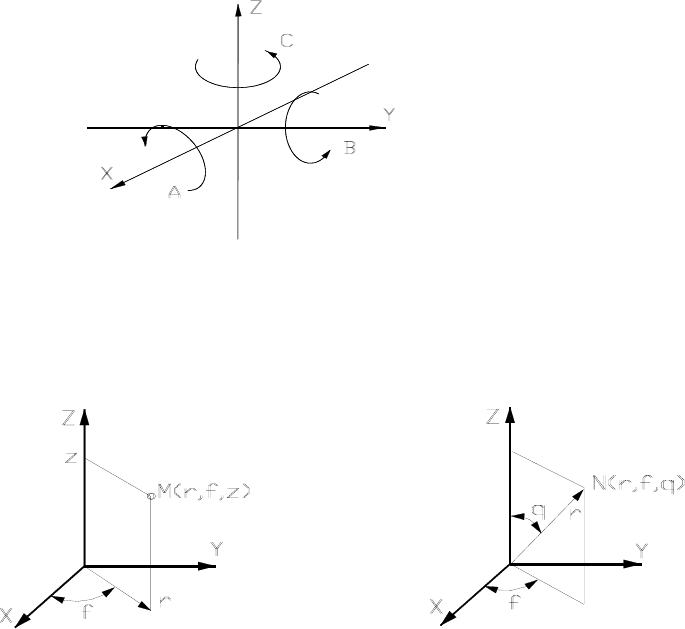
Стандартная система координат, принятая в соответствии с рекомендациями
ISO, представляет собой правую прямоугольную (декартовую) систему коорди-
нат (рис.1.6), однако современные станки могут работать в полярной и
сферической координатных системах.
Puc.1.6 Прямоугольная координатная система.
В цилиндрической системе координат (рис. 1.7) точка M задается радиус -
вектором r, центральным углом f, определяющим положение проекции точки на
основной плоскости и апликатой z. В сферической системе (рис. 1.8) координа-
тами точки N является радиус вектор r, долгота f и полярный угол q.
Рис. 1.7 Цилиндрическая система Рис. 1.8 Полярная система
ISO рекомендует закрепить за координатными осями следующие признаки.
Ось Z, ось шпинделя положительное направление соответствует выводу (или
отводу) инструмента от заготовки. Ось Х параллельно плоскости установки
- 8 -
8
заготовки. Если такому направлению соответствуют две оси (Х, У), то за ось Х
принимают ту, вдоль которой возможно большее перемещение узла станка.
Круговые перемещения вокруг осей обозначает буквами А (вокруг оси Х),
В (вокруг оси У), С(вокруг оси Z), причем положительное вращение против
часовой стрелки, если смотреть со стороны положительного направления оси.
Начало СКС ISO рекомендует помещать в такую точку, в которой все переме-
щения рабочих органов станка могли описываться положительными координа-
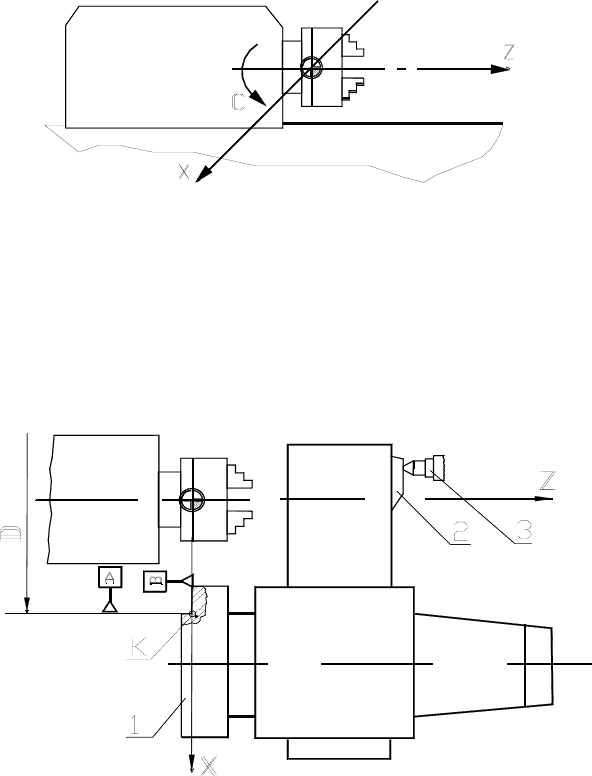
тами. Например, системой координат токарного станка служит двухкоординат-
ная система ХУ (рис.1.9) начало которой находится в центральной точке фланца
шпинделя.
Puc.1.9 СКС токарного станка.
Следует отметить, что начало СКС определяется взаимодействием жестких
упоров и концевых выключателей. Например, для токарных станков с УЧПУ
2Р22 начало СКС определяется через специальную точку – фиксированное
положение (ФП) (рис.1.10). После включения станка система отсчета УЧПУ
рассогласована с СКС – датчики положения суппорта генерируют случайные
величины.
Puc.1.10 Определение начала СКС через ФП
Служебной программой «Выход в ФП» обеспечивается движение по двум
направлениям: +Х и – Z, с целью определения базовой точкой К, инструмен-
тальной головки 1, начала СКС. За базовую точку К условно принимаем угол
инструментального гнезда инструментальной головки, определенного базирую-
щими плоскостями А и В. На линейках суппорта установлены упоры 2, один –
на замедление движения, другой – на останов (на рис. 1.10 условно показан
один упор), которые при поперечном перемещении суппорта воздействуют на
электромеханические выключатели 3 , останавливая плоскость А на диаметре D.
Величина D записывается в память УЧПУ в виде «параметра № 1» , определяя
- 9 -
9
нулевую точку по оси Х. Необходимо отметить, что координаты по оси Х для
станков с ЧПУ удваиваются на диаметр. Аналогично движение суппорта в
продольном направлении определяет плоскостью В нулевую точку по оси Z.
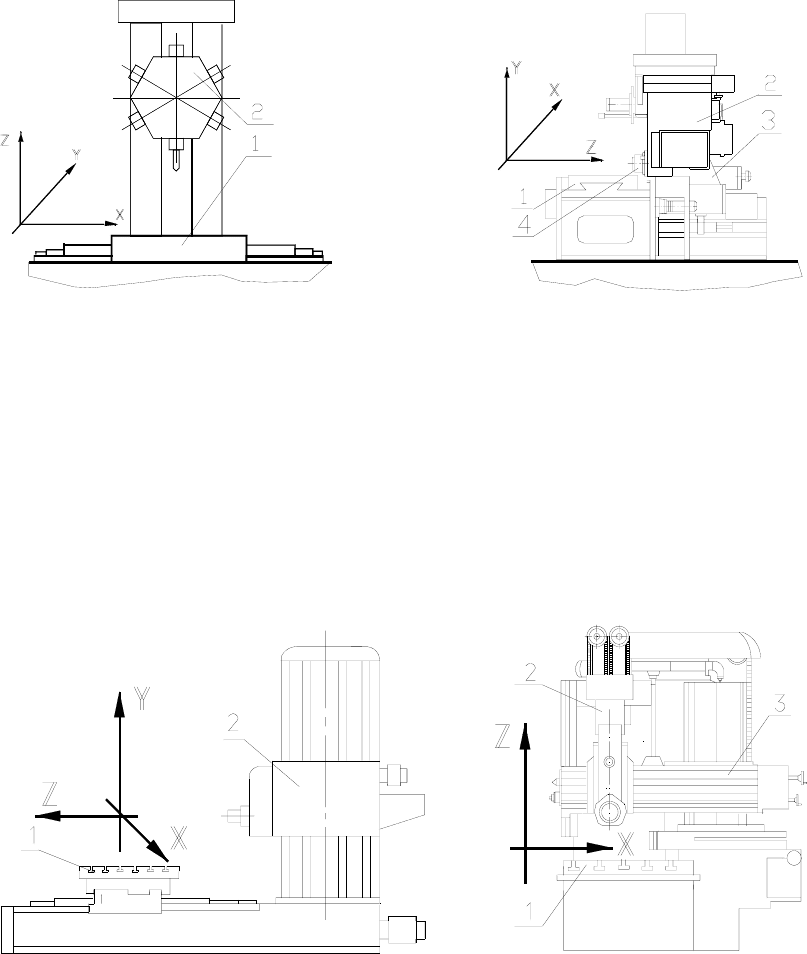
На рис.1.11 показана СКС сверлильного, станка с револьверной головкой,
типа 2Н185. Деталь устанавливается на столе 1, при этом вертикальная подача F
осуществляется перемещением револьверной головкой 2. При движении в по-
ложительном направлении инструмент должен удаляться от заготовки на столе,
следовательно ось Z будет направлена вверх.
На рис.1.12 показана СКС многооперационного станка типа ИР500, где 1
стол станка и 2 колонна. Для этого станка движение подачи F, параллельно оси
шпинделя 4, осуществляется перемещением колонны 2 со шпиндельной
бабкой 3, чем обусловлено направление оси Z.
Рис. 1.11 СКС станка 2Н185Ф2 Рис.1.12 СКС станка ИР500
На рис.1.13 показана СКС расточного станка типа 2636ГФ2. Для этого станка
движение подачи в горизонтальной плоскости осуществляется перемещением
стола 1 параллельно оси шпинделя - ось Z и перпендикулярно - ось X. Движе-
ние шпиндельной бабки 2 по направляющим колонны, выполняется по оси Y.
На рис.1.14 показана СКС карусельного станка типа 1А525МФ3. Для этого
станка характерно движение подачи в плоскости XZ. Ось стола станка 1 несу-
щего заготовку - ось Z. Движение подачи по оси Z - перемещение траверсы 3 по
направляющим колонны с суппортом 2, а по оси X - движение суппорта по
направляющим траверсы.
Рис. 1.13 СКС станка 2636ГФ2 Рис.1.14 СКС станка 1А525МФ3
- 10 -
10
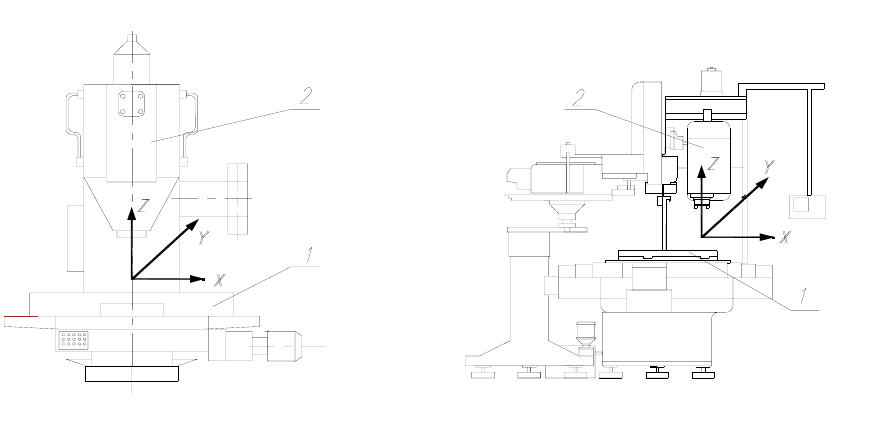
На рис.1.15 показана СКС вертикально-фрезерного станка типа ГФ2171.
Крестовый стол 1, выполняет перемещение в горизонтальной плоскости по
направлениям осей XY. Вертикальная подача осуществляется движением
гильзы шпинделя 2.
На рис.1.16 показана СКС многооперационного станка типа 2254МФ4.
Крестовый стол 1 - плоскость XY и перемещение шпиндельной бабки 2 по оси
Z, обеспечивают обработку деталей на этом станке.
Рис. 1.15 СКС станка ГФ2171 Рис.1.16 СКС станка 2254ВМФ4
2. Системы ЧПУ станков
Основным фактором, обусловившим необходимость создания и развития
станков с программным управлением, была потребность автоматизации обра-
ботки в средне и мелкосерийном производствах. Однако создание на основе
ЭВМ управляющих комплексов многооперационными станками, сделало
эффективным применение средств ЧПУ и в крупносерийном производстве.
Определяющим фактором в развитии УЧПУ является электроника. Первые
УЧПУ, выполняли на полупроводниковых элементах. Значительное ускорение в
развитии, системы ЧПУ получили с применением элементов малой и средней
интеграции, а затем с использованием микроЭВМ на микропроцессорной осно-
ве. На ряду с элементной базой совершенствовались также приводы станков и
общая структура УЧПУ. Моральное старение УЧПУ наступает быстрее, чем
станков. Практически УЧПУ претерпевают существенные изменения каждые 3
– 4 года, в то время как конструкции станков за этот период лишь незначитель-
но модифицируются, а сроки их морального старения в 2 – 2.5 раза больше.
Современные УЧПУ характеризуются мощным пользовательским интерфейсом
когда создание и контроль УП приближается к САП, реализованным на ПК. Это
обуславливает их высокую стоимость и вследствие этого можно предположить
переход к сетевым технологиям, когда многие функции УЧПУ станков, возьмет
на себя ЭВМ установления в технологическом отделе. Если ранее в системах
УЧПУ алгоритмы управления реализовывались конструкцией схемы, то в
современных системах эти алгоритмы определяет программное обеспечение
(ПрО). Можно сказать что грани между аппаратной частью различных по
назначению УЧПУ стираются, а их различие переходит в область ПрО. Это