Li S.Z., Jain A.K. (eds.) Encyclopedia of Biometrics
Подождите немного. Документ загружается.

calibration or 3D reconstruction. Other application
domains include pose estimation, image alignment,
or mosaicing. A t ypical example here is the features
used in the KLT tracker [1]. Finally, a set of local
features can be used as a robust image representation,
that allows to recognize objects or scenes without the
need for segmentation. Here again, it does not really
matter what the features actually represent. They do
not even have to be localized precisely, since the goal is
not to match them on an individual basis, but rather to
analyze their statistics. This way of exploiting local
features was first reported in the seminal work of [2]
and soon became very popular, especially in the con-
text of object recognition (both for specific objects as
well as for category-level recognition). Other applica-
tion domains include scene classification, texture anal-
ysis, image retrieval, and video mining.
Introduction
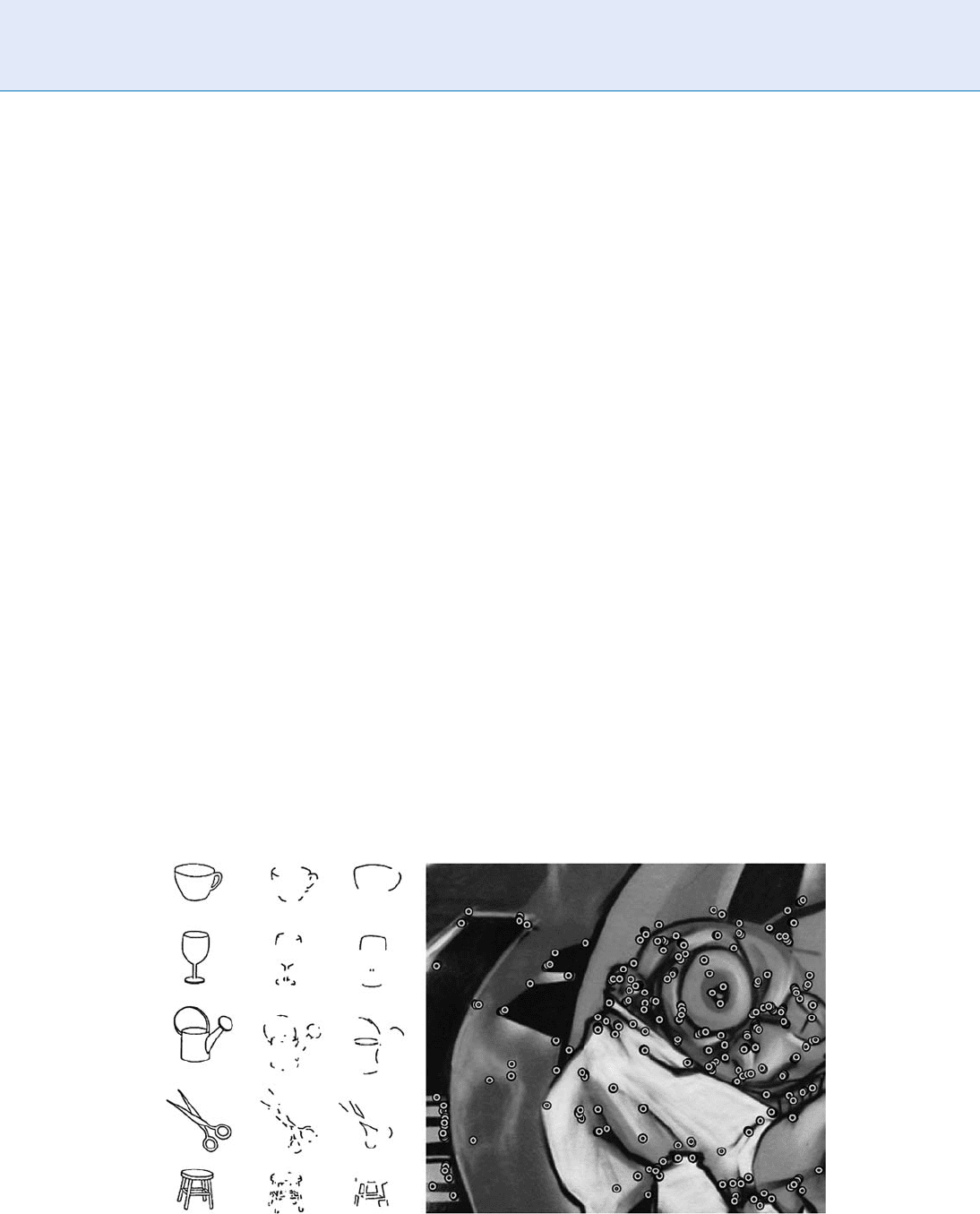
The first publication on local features appeared after
the observation on the importance of corners and
junctions in visual recognition [3] (see Fig. 1). Since
then a large number of algorithms have been suggested
for extracting
▶ interest points at the extrema of vari-
ous functions computed on the digita l shape. Also, it
has been understood early on in the image processing
and visual pattern recognition field that intersections
of straight lines and straight corners are strong indic a-
tions of man made structures. Such features have been
used in the first series of applications from line draw-
ing images [4] and photomosaics [5]. First mono-
graphs on digital image processing [6, 7] and later
editions served to establish the field on a sound theo-
retical foundation. Several survey articles on local fea-
tures appeared recently [8–10].
Interest points are now the preferred strategy for
solving a wide variety of problems, from wide baseline
matching and the recognition of specific objects to the
recognition of object classes. Additionally, similar ideas
have been applied to texture recognition, scene classi-
fication, robot nav igation, visual data mining, and
symmetry detection, to name just a few application
domains.
Local
▶ invariant features not only allow to find
correspondences, in spite of large changes in viewing
conditions, occlusions, and image clutter (wide base-
line matching), but also yield an interesting descrip-
tion of the image content for image retrieval and object
or scene recognition tasks (both for specific objects as
well as categories). To put this into context, some
alternative strategies are briefly summarized, including
global features, image segments, and exhaustive and
random sampling of features.
Global Features
In the field of image retrieval, many global features
have been proposed to describe the image content,
with color histograms and variations thereof as a
Local Image Features. Figure 1 Illustration of local features in line drawing images and a grayvalue image.
940
L
Local Image Features

typical example [11]. This approach works surprisingly
well, at least for images with distinctive colors, as long
as it is the overall composition of the image as a whole
that the user is interested in, rather than the fore-
ground object. Indeed, global features cannot distin-
guish foreground from background, and mix
information from both parts together.
Global features have also been used for object rec-
ognition, resulting in the first appearance-based
approaches to tackle this challenging problem. [12]
and later [13] proposed to compute a principal com-
ponent analysis of a set of model images and to use the
projections onto the first few principal components as
descriptors. Compared to the purely geometry-based
approaches tried before, the results of the novel ap-
pearance-based approach were striking. A whole new
range of natural objects could suddenly be recognized.
However, being based on a global description, image
clutter and occlusions again form a major problem,
limiting the usefulness of the system to cases with clean
backgrounds or where the object can be segmented
out, e.g., relying on motion information.
Image Segments
An approach to overcome the limitations of the global
features is to segment the image in a limited number
of regions or segments, with each such region
corresponding to a single object or a part thereof.
However, this raises a chicken-and-egg problem as
image segmentation is a very challenging problem in
itself, which in general requires a high-level under-
standing of the image content. For generic objects,
color and texture cues are insufficient to obtain mean-
ingful segmentations.
Sampled Features
A way to deal with the problems encountered with
global features or image segmentation is to exhaustively
sample different subparts of the image at each location
and scale. For each such image subpart, global features
can then be computed. This approach is also referred
to as a sliding window based approach. It has been
especially popular in the context of face detection,
but has also been applied for the recognition of specific
objects or particular object classes such as pedestrians
or cars.
By focusing on subparts of the image, these meth-
ods are able to find similarities between the queries and
the models in spite of changing backgrounds, even if
the object covers only a small percentage of the total
image area. In the bottom, they still do not manage to
cope with partial occlusions, and the allowed shape
variability is smaller than what is feasible with a local
feature based approach. However, by far the biggest
drawback is the inefficiency of this approach. Each and
every subpart of the image must be analyzed, resulting
in thousands or even millions of features per image.
This requires extremely efficient methods which signif-
icantly limits the scope of possible applications. To
overcome the complexity problems sparser fixed grid
sampling of image patches can be used. It is however
difficult to achieve invariance to geometric deforma -
tions for such features. The approach can tolerate some
deformations due to dense sampling over possible
locations, scales, poses etc. but the individual features
are not invariant. As a result, sampled features cannot
be used when the goal is to find precise corres-
pondences between images. However, for some app-
licationssuchassceneclassificationortexture
recognition, they may well be sufficient.
In a similar vein, rather than using a fixed grid of
patches, a random sampling of image patches can also
be used. This gives a larger flexibility in the number of
patches, the range of scales or shapes, and their spatial
distribution. Random patches are in fact a subset of the
dense patches, and are used mostly to reduce the com-
plexity. Their repeatability is poor hence they work
better as an addition to the regular features rather
than as a stand alone method.
Finally, to overcome the complexity problems
while still providing a large number of features with
better than random localization one can sample fea-
tures uniformly from edges. This proved useful for
dealing with wiry objects well represented by edges
and curves.
Properties of the Ideal Local Feature
Local features typically have a spatial extent, i.e., the
local neighborhood of pixels ment ioned above. In con-
trast to classical segmentation, this can be any subset of
an image. The region boundaries do not have to corre-
spond to the changes in image appearance such as
color or texture. Also, multiple regions may overlap,
Local Image Features
L
941
L

and ‘‘uninteresting’’ parts of the image such as homo-
geneous areas can remain uncovered.
Ideally, one would like such local features to corre-
spond to semantically meaningful object parts. In
practice, however, this is unfeasible, as this would
require high-level interpretation of the scene content,
which is not available at this early stage. Instead, detec-
tors select local features directly based on the underly-
ing intensity patterns.
Good features should have the following
properties:
Repeatability: Given two images of the same object
or scene, taken und er different viewing conditions,
a high percentage of the features detected on the
scene part visible in both images should be found
in both images.
Distinctiveness/informativeness: The intensity pat-
terns underlying the detected features should
show a lot of variation, such that features can be
distinguished and matched.
Locality: The features should be local, so as to
reduce the probability of occlusion and to allow
simple model approximations of the geometric and
photometric deformations between two images
taken under different viewing conditions (e.g.,
based on a local planarity assumption).
Quantity: The number of detected features should
be sufficiently large, such that a reasonable number
of features are detected even on small objects. How-
ever, the optimal number of features depends on
the application. Ideally, the number of detected
features should be controllable over a large range
by a simple and intuitive threshold. The density
of features should reflect the information con-
tent of the image t o provide a compact image
representation.
Accuracy: The detected features should be accu-
rately localized, in both image location, with re-
spect to scale and possibly shape.
Efficiency: Preferably, the detection of features
in a new image should allow for time-critical
applications.
Repeatability, arguably the most important
property of all, can be achieved in two different
ways: either by invariance or by robustness.
Invariance: When large deformations are to be
expected, the preferred approach is to model these
mathematically if possible, and then develop
methods for feature detection that are unaffected
by these mathematical transformations.
Robustness: In case of relatively small deformations,
it often suffices to make feature detection methods
less sensitive to such deformations, i.e., the accu-
racy of the detection may decrease, bu t not drasti-
cally. Typical deformations that are tackled using
robustness are image noise, discretization effects,
compression artifacts, blur, etc. Also geometric and
photometric deviations from the mathematical
model used to obtain invariance are often over-
come by including more robustness.
Clearly, the importance of these different properties
depends on the actual application and settings, and
compromises need to be made.
Repeatability is required in all application scenarios
and it directly depends on the other properties like
invariance, robustness, quantity etc. Depending on
the application, increasing or decreasing them may
result in higher repeatability.
Distinctiveness and locality are competing proper-
ties and cannot be fulfilled simultaneously: the more
local a feature, the less information is available in
the underlying intensity pattern and the harder it
becomes to match it correctly, especially in database
applications where there are many candidate features
to match to. On the other hand, in case of planar
objects and/or purely rotating cameras (e.g., in image
mosaicing applications), images are related by a global
homography, and there are no problems with occlu-
sions or depth discontinuities. Under these conditions,
the size of the local features can be increased without
problems, resulting in a higher distinctiveness.
Similarly, an increased level of invariance typically
leads to a reduced distinctiveness, as some of the image
measurements are used to lift the degrees of freedom of
the transformation. A similar rule holds for robustness
versus distinctiveness, as typically some information is
disregarded (considered as noise) to achieve robust-
ness. As a result, it is important to have a clear idea on
the required level of invariance or robustness for a
given application. It is hard to achieve high invariance
and robustness at the same time and invariance, which
is not adapted to the application, may have a negative
impact on the results.
Accuracy is especially important in wide baseline
matching, registration, and structure from motion
applications, where precise correspondences are
942
L
Local Image Features
needed to, e.g., estimate the epipolar geometry or to
calibrate the camera setup.
Quantity is particularly useful in some class-le vel
object or scene recognition methods, where it is vital to
densely cover the object of interest. On the other hand,
a high number of features have in most cases a negative
impact on the computation time and it should be kept
within limits. Also robustness is essential for object
class recognition, as it is impossible to model the
intra-class variations mathematically, so full invariance
is impossible. For these applications, an accurate local-
ization is less important. The effect of inaccurate
localization of a feature detector can be countered, up
to some point, by having an extra robust descriptor,
which yields a feature vector that is not affected by
small localization errors.
Related Entries
▶ Gabor filter
▶ Image descriptors
▶ Local binary pattern
▶ Local Feature Filters
▶ Matching
▶ Registration
References
1. Shi, J., Tomasi, C.: ‘‘Good features to track,’’ in: Proceedings of
the Conference on Computer Vision and Pattern Recognition,
pp. 593–600 (1994)
2. Schmid, C., Mohr, R.: Local gray-value invariants for image re-
trieval. IEEE Trans. Pattern Anal. Mach. Intell. 19(5), 530–534
(1997)
3. Attneave, F.: Some informational aspects of visual perception.
Psychol. Rev. 61, 183–193 (1954)
4. Freeman, H.: A review of relevant problems in the processing of
line-drawing data, AII, pp. 155–174 (1969)
5. Milgram, D.: Computer methods for creating photomosaics.
IEEE Trans. Comput. 23 , 1113–1119 (1975)
6. Duda, R., Hart, P.: Pattern Classification and Scene Analysis.
Wiley, New York (1973)
7. Rosenfeld, A.: Picture processing by computer. ACM Comput.
Surv. 1(3), 147–176 (1969)
8. Mikolajczyk, K., Schmid, C.: A performance evaluation of local
descriptors. IEEE Trans. Pattern Anal. Mach. Intell. (2005)
9. Mikolajczyk, K., Tuytelaars, T., Schmid, C., Zisserman, A.,
Matas, J., Schaffalitzky, F., Kadir, T., Gool, L.V.: A comparison
of affine region detectors. Int. J. Comput. Vis. (2005)
10. Tuytelaars, T., Mikolajczyk, K.: Local Invariant Feature
Detectors: A Survey, Foundations and Trends in Computer
Graphics and Vision (2008)
11. Swain M., Ballard, D.: Color indexing. Int. J. Comput. Vis. 7(1),
11–32 (1991)
12. Turk, M.A., Pentland, A.P.: Eigenfaces for face recognition,
in The Conference on Computer Vision and Pattern Recognition,
pp. 586–591 (1991)
13. Murase, H., Nayar, S.: Visual learning and recognition of
3D objects from appearance. Int. J. Comput. Vis. 14(1), 5–24
(1995)
Local Image Filters
ABDENOUR HADID,MATTI PIETIKA
¨
INEN
Machine Vision Group, Department of Electri cal and
Information Engineering, University of Oulu, Finland
Synonyms
Gabor features; LBP features
Definition
Local feature filters can be defined as operators (or
filters) which are applied to an image in order to
extract local characteristics describing (some) impor-
tant information in the image. For instance, these
characteristics (or
▶ features) can be used to detect,
recognize, and analyze the objects in the image. They
can also facilitate the interpretation or further proces-
sing of the image. In contrast to global features which
describe the overall content and shape of the objects in
the image, local features define specific information in
local regions. Among the most effective operators for
feature extractio n are Gabor filter and local binary
pattern (LBP). Gabor filters are linear bandpass filters
computed for images at different orientations and
scales. The imp ulse response of a Gabor filter is defined
by a harmonic function multiplied by a Gaussian func-
tion. Local binary pattern is a nonlinear operator
which labels the pixels of an image by thresholding
the neighborhood of each pixel with the value of the
center pixel and considers the result as a binary num-
ber. LBP labels can be regarded as local primitives such
as curved edges, spots, flat areas, etc. The histogram of
Local Image Filters
L
943
L

the labe ls can be then used as a feature vector (or image
representation). Gabor filtering and LBP operator are
powerful means of analyzing biometric data such faces,
irises, fingerprints, palmprints, etc.
Introduction
Typically, biometric systems operate by acquiring bio-
metric data from which features are extracted and
matched against those of the templates which are
stored in the database [1]. This involves two crucial
aspects: feature extraction and classifier design. The
aim of feature extraction is to find good descriptors
which are easy to compute and have high
▶ extra-class
variance (i.e., between different persons) and low
▶ intra-class variance, w hich means that the descriptor
should be robust with respect to aging of the subjects,
alternating illumination and other factors. Obviously,
if inadequate features are adopted, even the most so-
phisticated classifiers (i.e., comparison schemes) will
fail to accomplish the given recognition task. There-
fore, feature extraction is a very important task in any
biometric system.
Different global (or ho listic) methods such as Prin-
cipal Component Analysis (PCA) have been widely
studied and applied to biometrics but lately local
features have gained more attention due to their ro-
bustness to challenges such as pose and illumination
changes. In this context, feature extraction using
Gabor filtering or LBP has gained increasing attention
in various biometric applications. A notable example
is iris recognition, in which approaches based on
multichannel Gabor filtering have been highly success-
ful. Gabor filters have also been widely used, e.g., in
fingerprint [2] and palmprint analysis [3]. Also, the
well-known Elastic Bunch Graph Matching (EBGM)
method is based on Gabor filter responses at certain
fiducial points to recognize faces [4]. More recently,
LBP features have provided excellent results in various
biometric applications [5, 6, 7, 8]. Perhaps the most
important property of the LBP operator in real-world
applications is its robustness to mono tonic gray-scale
changes caused, for example, by illumination varia-
tions. Another important property is its computation-
al simplicity, which makes it possi ble to analyze
biometric data in challenging real-time settings.
The Gabor and LBP methods provide complemen-
tar y information for analysis: LBP captures small
and fine details (or micro features) while Gabor filters
encode appearance information over a broader range
of scales (macro features).
Gabor Filters
The theory behind Gabor filters started from the original
work of Dennis Gabor who proposed in 1946 to repre-
sent signals as a combination of elementary functions
[9]. Those particular elementary functions are now
known as Gabor elementary functions (GEF). How-
ever, the use of Gabor filters in image processing
started from the work of Granlund who extended the
elementary 1-d Gabor functions to 2-d elementary
functions and used them in the development of a
general picture processing operator [10]. Later, Daug -
man proposed the generalization of 1-d gabor func-
tions to two dimensions and importantly showed the
equivalence between a structure based on the 2-d
Gabor functions and the organization and the charac-
teristics of the mammalian visual system [11]. These
physiological findings are undoubtedly behind the
great impact of Gabor research especially in image
processing.
Roughly speaking, Gabor filtering in image proces-
sing consists of applying a set of 2-d Gabor elementary
functions of various parameters (e.g., different di la-
tions and rotations) to an input image thus obtaining
Gabor image features (i.e., feature space). These
extracted Gabor features can be then used directly as
feature vectors for analysis (e.g ., biometric recogni-
tion) or can first be transformed into new feature
vectors (e.g ., [8]). So, typically, an input image I(x, y)
is convolved with a 2-d Gabor function g(x,y) to ob-
tain a Gabor feature image r(x, y) as follows:
rðx; yÞ¼Iðx; yÞgðx; yÞ
¼
ZZ
þ1
1
Iðdx; dÞgðx dx; y dÞ dx d:
There are several forms of Gabor elementary functions
(GEFs) which can be designed to be highly selective in
frequency w hile displaying good spatial localization.
GEFs can be also seen as bandpass filters which can
be configured to be used for feature extraction. A GEF
is defined as a Gaussian modulated by a sinusoid
(cosine function) as follows:
944
L
Local Image Filters
g
l;y;c;s;g
ðx; yÞ¼expð
x
0
2
þ g
2
y
0
2
2s
2
Þ
cosð2p
x
0
l
þ cÞ;
where x
0
¼ x cos y þ y sin y, y
0
¼x sin y þ y cos y,
l represents the wavelength of the cosine factor, y
represents the orientation of the normal to the parallel
stripes of a Gabor function, c is the phase offset,
s refers to the variance of the Gaussian function and
g is the spatial aspect ratio and specifies the ellipticity
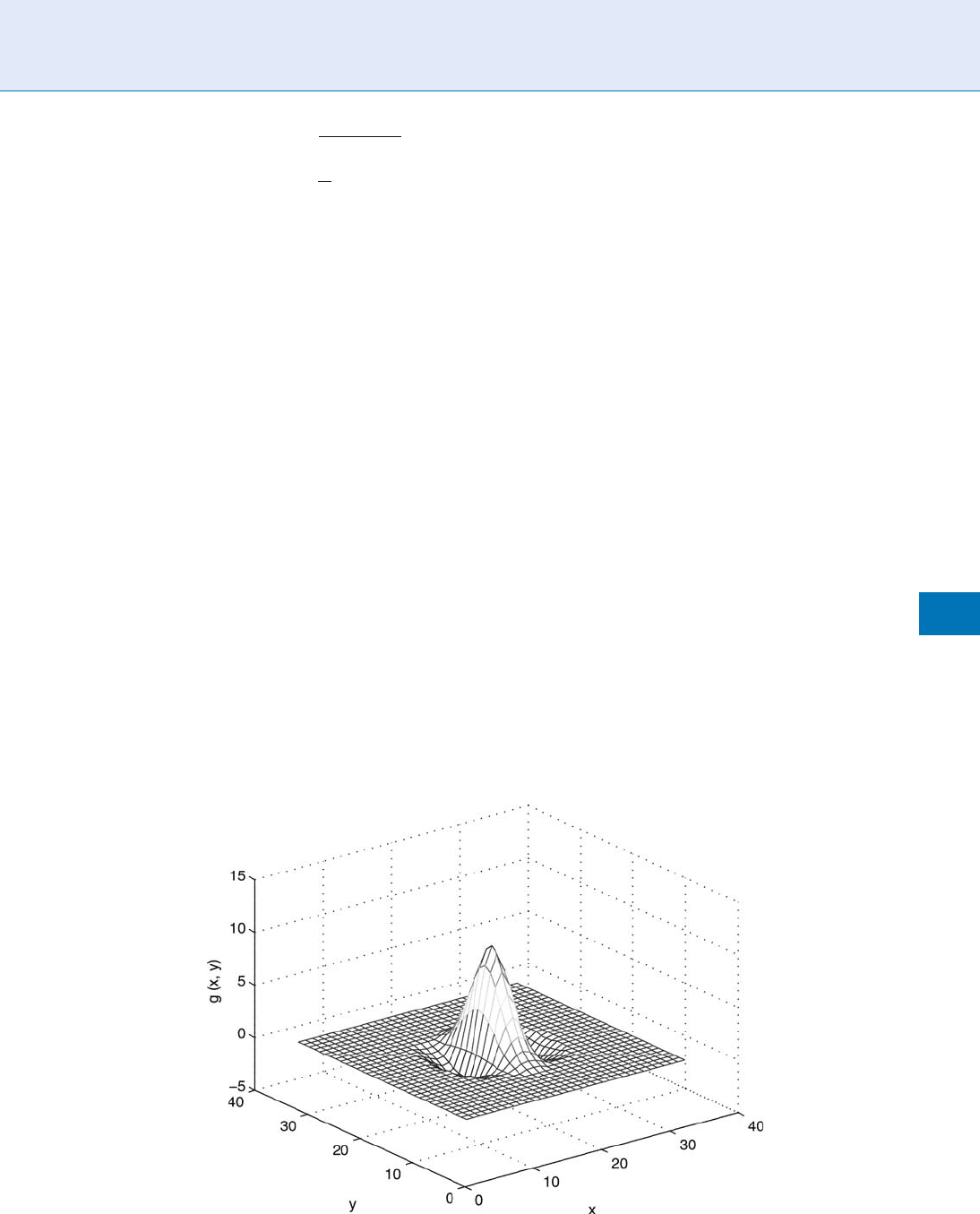
of the support of the Gabor function. Figure 1 shows
an example of a typical 2-d Gabor filter.
Local Binary Patterns
The LBP texture analysis operator [ 12], introduced by
Ojala et al., is defined as a gray-scale invariant texture
measure, derived from a general definition of texture in
a local neighborhood. It is a powerful means of texture
description and among its properties in real-world
applications are its discriminative power, computa-
tional simplicit y, and tolerance against monotonic
gray-scale changes. The original LBP operator forms
labels for the image pixels by thresholding the 3 3
neighborhood of each pixel with the center value and
considering the result as a binary num ber. The histo-
gram of these 2
8
¼256 different labels can then be used
as a texture descriptor.
The operator has been extended to use neigbor-
hoods of different sizes [13]. Using a circular neighbor-
hood and bilinearly interpolating values at noninteger
pixel coordinates allows any radius and number of
pixels in the neighborhood. The notation (P, R)is
generally used for pixel neighborhoods to refer to P
sampling points on a circle of radius R. The calculation
of the LBP codes can be easily done in a single scan
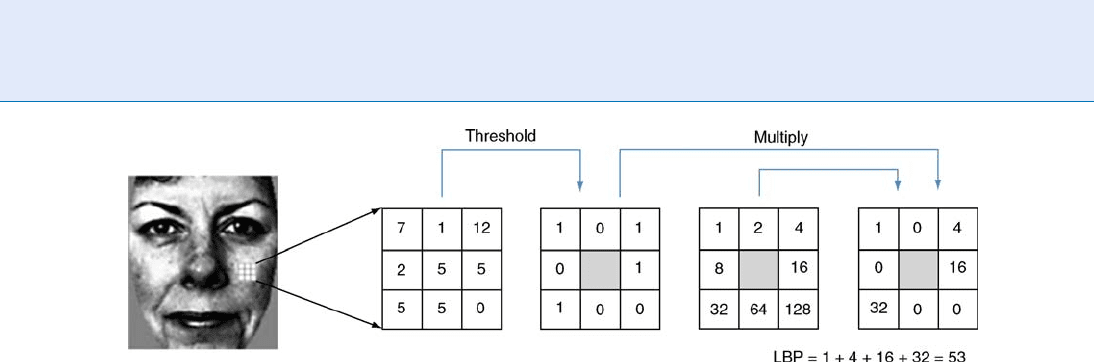
through the image. See Fig. 2 for an illustration of the
basic LBP operator. The value of the LBP code of a
pixel (x
c
, y
c
) is given by LBP
P;R
¼
P
P1
p¼0
sg
p
g
c
2
p
,
where g
c
corresponds to the gray value of the center
pixel (x
c
, y
c
), g
p
refers to gray values of P equally spaced
pixels on a circle of radius R, and s defines a threshold-
ing function as follows:
sðxÞ¼
1; if x 0;
0; otherwise:
Another extension to the original operator is the
definition of so called uniform patterns [13]. This ex-
tension was inspired by the fact that some binary
patterns occur more commonly in texture images
than in others. A local binary pattern is called uniform
if the binary pattern contains at most two bitwise
transitions from 0 to 1 or vice versa when the bit
pattern is traversed circularly. For example, the patterns
00000000 (0 tr ansitions), 01110000 (2 transitions),
Local Image Filters. Figure 1 An example of a typical 2-d Gabor filter.
Local Image Filters
L
945
L
and 11001111 (2 transitions) are uniform whereas the
patterns 11001001 (4 transitions) and 01010011
(6 transitions) are not. In the computation of the
LBP labels, uniform patterns are used so that there is
a separate label for each uniform pattern and all the
nonuniform patterns are labeled with a single label.
For example, when using (8, R) neighborhood, there
are a total of 256 patterns, 58 of which are uniform,
which yields 59 different labels. This yields the follow-
ing notation for the LBP operator: LBP
P,R
U2
. The sub-
script represents using the operator in a (P, R)
neighborhood. Superscript u2 stands for using only
uniform patterns and labeling all remaining patterns
with a single label. Each bin (LBP label) can be
regarded as a microtexton. Local primitives which are
codified by these bins include different types of curved
edges, spots, flat areas, etc.
The original LBP operator was defined to only deal
with spatial information. Recently, it has been extend-
ed to a spatiotemporal representation for dynamic
texture analysis. This has yielded the so called Volume
Local Binary Pattern operator (VLBP) [6]. The idea
behind VLBP consists of looking at dynamic texture as
a set of volumes in the (X,Y, T) space where X and Y
denote the spatial coordinates and T denotes the frame
index (time). The neighborhood of each pixel is thus
defined in three dimensional space. Then, similar to
LBP in spatial domain, volume textons can be defined
and extracted into histograms. Therefore, VLBP com-
bines motion and appearance together to describe
dynamic texture. Later, to make the VLBP compu ta-
tionally simple and easy to extend, the cooccurrences
of the LBP on three orthogonal planes (LBP-TOP)
were also introduced [6]. LBP-TOP consists then in
considering three orthogona l planes: XY , XT, and YT,
and concatenating local binary pattern cooccurrence
statistics in these three directions. The circular
neighborhoods are generalized to elliptical sampling
to fit to the space-time statistics.
In the LBP approach to texture classification [13],
the occurrences of the LBP codes in an image are
collected into a histogram. The classification is then
performed by computing simple histogram similari-
ties. However, considering a similar approach for bio-
metric (e.g., facial) image representation results in a
loss of spatial information and therefore one should
codify the texture information while retaining also
their locations. One way to achieve this goal using
texture operators is to build several local descriptions
of the face and combine them into a global description
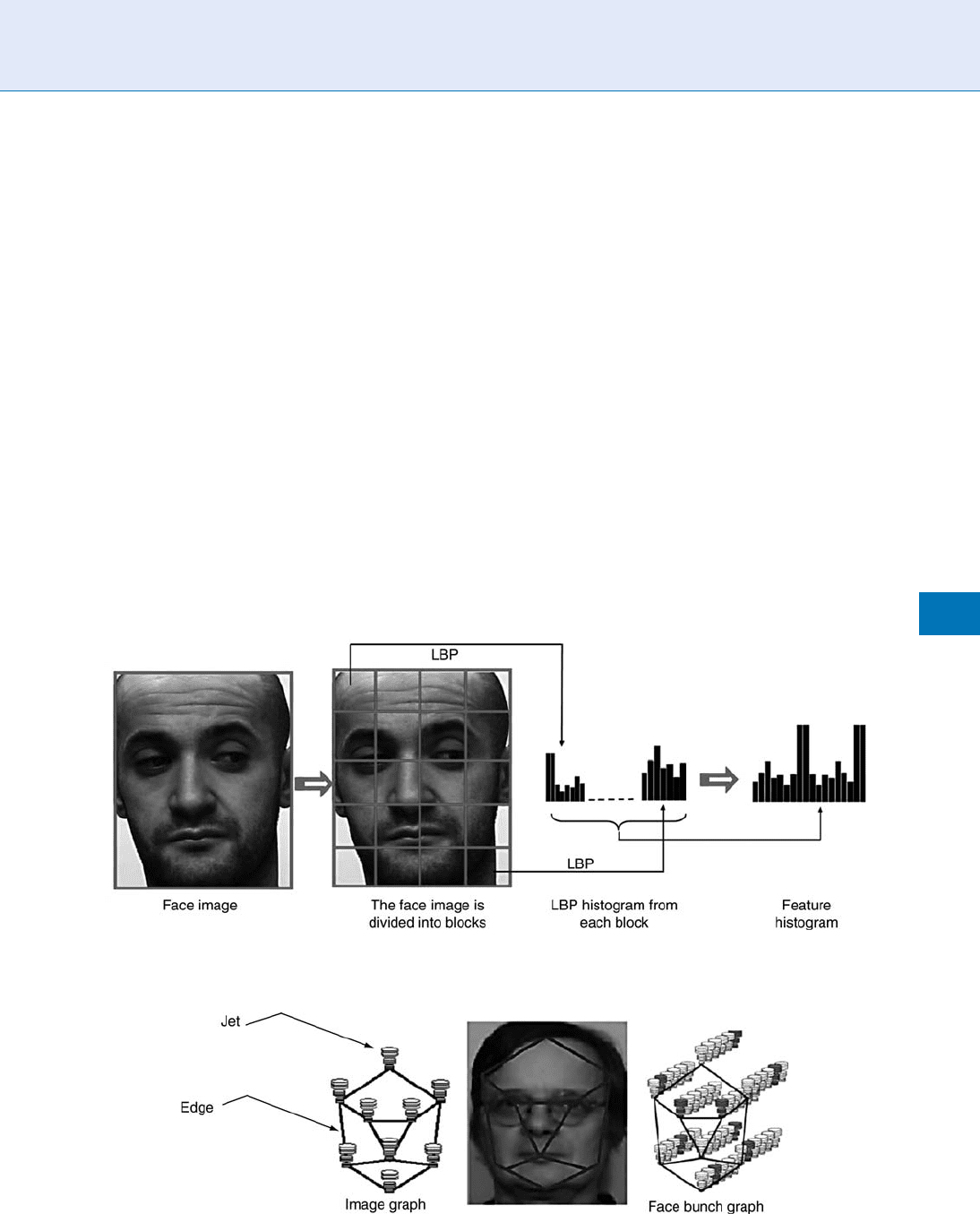
[5, 8]. Figure 3 shows an example of an LBP based
facial representation. Such local descriptor based
methods have been gaining interest lately which is
understandable given the limitations of the holistic
representations. These local feature based methods
seem to be more robust against variations in pose or
illumination than holistic methods.
Applications
There is a considerable amount of research concerning
Gabor filtering based biometric recognition, especially
in iris, face, fingerprint, and plamprint recognition
[1, 14, 2, 15, 4, 3]. For instance, Daugman developed
the pioneering approach to iris recognition [14]. He
used 2-d Gabor filtering to extract local texture fea-
tures from iris images, resulting in an IrisCode repre-
sentation with 2,048bits. Then, the recognition was
done simply by computing the Hamming distance
between a pair of iris representations. The system was
tested on billions of iris images and the results showed
excellent recognition rates very close to 100% (only
one false acceptance in 151,000 imposter tests for one
Local Image Filters. Figure 2 The basic LBP operator.
946
L
Local Image Filters
false rejection in 128,000 tests). Nowadays, many com-
mercial iris-recognition systems are based on Daug-
man’s algorithms.
Gabor filter based features have also been widely
applied to fingerprint recognition systems. A notable
example is the system developed by Jain [2] using a
bank of Gabor filters to capture both the global pattern
of ridges and valleys and the local characteristic s
in fingerprint patterns yielding feature vectors called
FingerCodes. The fingerprint matching is based on
the Euclidean distance between two corresponding
FingerCodes. The system achieved remarkable recog-
nition rates.
In face recognition, Lades et al. developed a Gabor
based system using dynamic link a rchitectu re (DLA)
framework which recognizes faces by extracting Gabor
jets at each node of a rectangular grid over the face
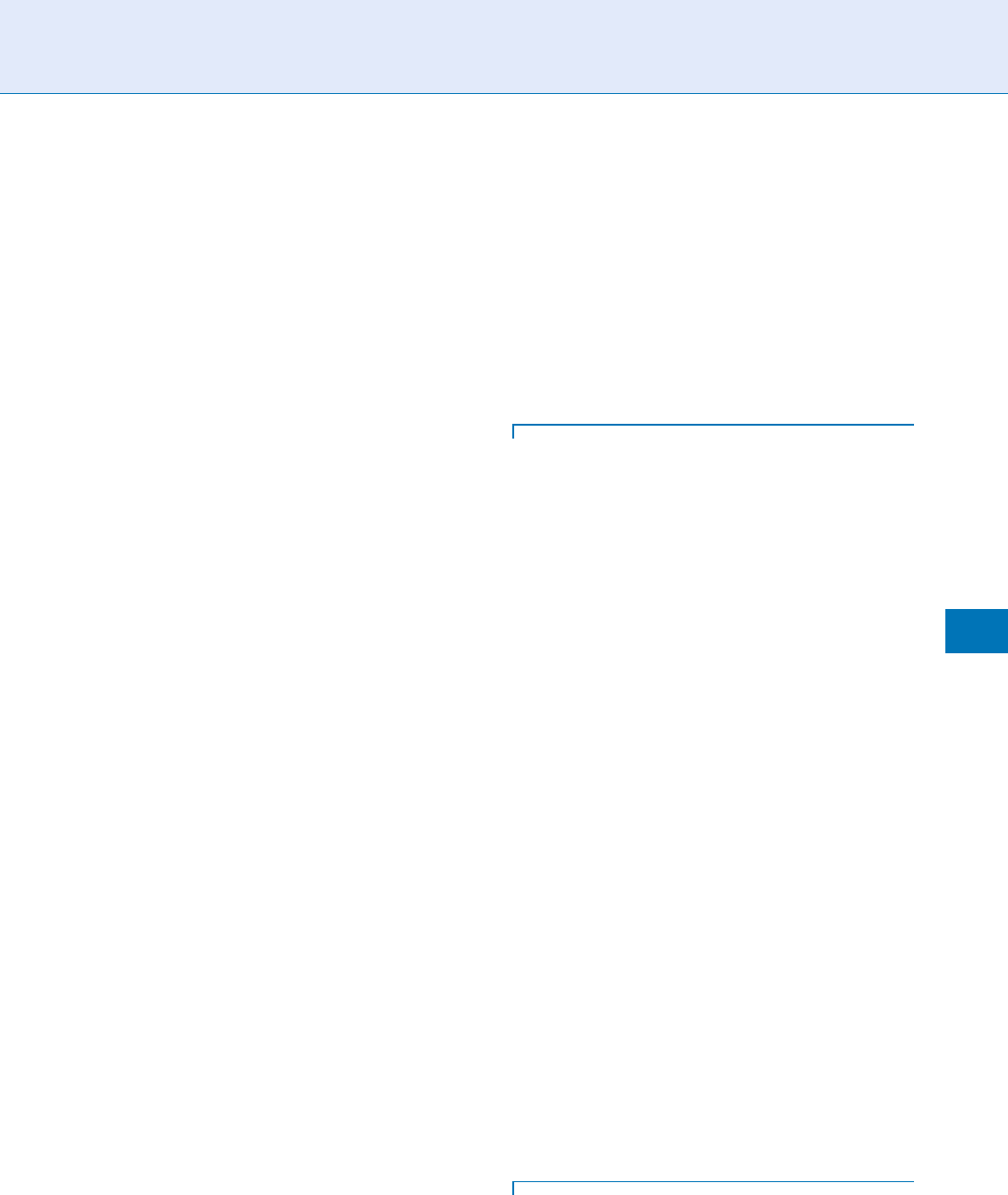
image [15]. Later, Wiskott et al. extended the approach
and developed the well-know n Gabor wavelet-based
elastic bunch graph matching (EBGM) method to
label and recognize faces [4]. In the EBGM algorithm,
faces are represented as grap hs with nodes positioned
at fiducial points (such as the eyes, the tip of the nose,
etc.) and edges labeled with distance vectors (see
Fig. 4). Each node contains a set of Gabor wavelet
coefficients, known as a jet. Thus, the geometry of the
face is encoded by the edges while the gray value
distribution (texture) is encoded by the jets. The iden-
tification of a new face consists of determining among
the constructed graphs the one which maximizes the
graph similarity function.
In palmprint recognition, for instance, Zhang et al.
[3] proposed the use of 2-d Gabor phase encoding
scheme for palmprint feature extraction and represen-
tation. First, the central areas from palmprint images
are segmented and then 2-d Gabor based features are
extracted. The recognition is performed using normal-
ized Hamming distance. Experiments on a database of
7,752 low resolution palmprint images showed good
performance. It is worth nothing that the use of Gabor
filtering in biometrics is not limited to the examples
cited earlier as many other Gabor based biometric
Local Image Filters. Figure 3 Example of an LBP based facial representation.
Local Image Filters. Figure 4 An example of facial representation with the elastic bunch graph principle (EBGM).
Local Image Filters
L
947
L

systems for commercial applications have been suc-
cessfully developed. In addition, Gabor features have
also been successfully used with other biometric mod-
alities including speech, gait, ear, etc.
LBP has also been successfully used in various
biometric applications such as face, activity, iris, and
palmprint recognition. The most remarkable applica-
tion of LB P in biometrics is face analysis [5]. The idea
consists in dividing the faces into several regions (or
blocks) from which the local binary pattern histograms
are computed and concatenated into a single, spatially
enhanced feature histogram (Fig. 3). In such a rep-
resentation, the texture of facial regions is encoded
by the LBP while the shape of the face is recovered by
the concatenation of different local histograms. The
LBP methodology has attained an established posi-
tion in face analysis research and several research
groups around the world have adopted similar ap-
proach to different tasks such as near-infrared based
face recognition, gender recognition, head pose esti-
mation and 3D face recognition. A bibliography of
LBP-related research in facial image analysis can be
found at http://www.ee.oulu.fi/research/imag/texture/
lbp/bibliography/.
The spatiotemporal versions of LBP (VLBP and
LBP-TOP) have also been successfully applied to per-
son analysis and identification from video sequences,
including face, facial expression, visual speech and
activity recognition. To recognize six prototypic emo-
tions (anger, disgust, fear, joy, sadness, and surprise)
from videos, Zhao et al. [6] divided the face sequences
into several overlapping block volumes, extracted LBP-
TOP (or VLBP) histograms from each block and then
concatenated them to obtain a single histogram repre-
senting the appearance and motion of the facial ex-
pression in the face seque nces. This approach does not
require error-prone segmentation of lips and other
facial features and it is robust against monotonic gray
scale changes caused, for example, by illumination and
skin color variations, and errors in face alignment.
Hadid et al. [7] also adopted spatiotemporal LBP for
face recognition from videos with excellent results.
Starting from the observation that VLBP features con-
sist of both intra and extra personal information
(corresponding to both facial expression a nd identity),
they proposed a robust recognition system using VLBP
with AdaBoost learning. The idea was to classify the
VLBP facial information into intra and extra classes,
and then use only the
▶ extra-class VLBP features for
recognition. This was achieved by looking at a face
sequence as a selected set of rectangular prisms
(volumes) from which local histograms of extended
VLBP code occurrences are extracted. Then, a boosting
approach is used for selecting only the most discrimi-
native spatiotemporal patterns for face recognition
while discarding the patterns which may hinder the
recognition process.
There are many other very successful biometric
applications based on Gabor filtering or LBP features.
The approaches based on Gabor filtering or wavelets
measuring the frequency contents of image points or
regions at different resolutions and orientations en-
code appearance information over a broad range of
scales (macro features) w hile LBP operat or captures
smaller and finer details (or micro features). This
makes Gabor filtering and LBP operator powerful
means for extracting complementary information. Tak-
ing this into account, one way to go ahead would be
to combine Gabor and LBP methods. Following this
direction, Zhang et al. proposed the so called Local
Gabor binary pattern histogram sequence (LGBPHS)
in which multiresolution and multiorientation descrip-
tion of an image using Gabor filters is first computed,
and then LBP histograms are computed from the
Gabor features for small nonoverlapping regions and
concatenated into a feature histogram. Excellent results
are reported [8]. Other works have also successfully
exploited the complementary of Gabor filters and
LBP features by fusing the two sets of features for
recognition (see references at http://www.ee.oulu .fi/
research/imag/texture/lbp/bibliography/).
Summary
Feature extraction is a very important and crucial task
in all biometric systems. In this context, Gabor fil tering
and LBP operator are powerful means for extracting
complementary features and describing biometric data
such as faces, irises, fingerprints, palm prints, etc. This
can be attested by the large number of successful bio-
metric applications based on these features. Gabor
filters are linear ban dpass filters computed for images
at di fferent orientations and scales while LBP is a
nonlinear operator codifying the relationship between
each center pixel and its neighborhood, thus describing
a set of local primitives such as curved edges, spots, flat
areas, etc. In contrast to global features which describe
948
L
Local Image Filters
the overall content and shape of the objects in the
image, local features define specific information in
local regions. The local feature based methods seem to
be more robust against variations in pose or illumina-
tion than holistic methods.
Related Entries
▶ Classifier Design
▶ Face Descriptors
▶ Feature Extraction
References
1. Jain, A.K., Ross, A., Prabhakar, S.: An introduction to biometric
recognition. IEEE Trans. Circuits Syst. Video Technol., Special
Issue on Image- and Video-Based Biometrics 14(1), 4–20 (2004)
2. Jain, A.K., Prabhakar, S., Hong, L., Pankanti, S.: Filterbank-
based fingerprint matching. IEEE Trans. Image Process. 9(5),
846–859 (2000)
3. Zhang, D., Kong, W., You, J., Wong, M.: Online palmprint
identification. IEEE Trans. Pattern Anal. Mach. Intell.
25(9),1041–1050 (2003)
4. Wiskott, L., Fellous, J.M., Kuiger, N., von der Malsburg, C.: Face
recognition by elastic bunch graph matching. IEEE Trans. Pat-
tern Anal. Mach. Intell. 19, 775–779 (1997)
5. Ahonen, T., Hadid, A., Pietika
¨
inen, M.: Face description with
local binary patterns: application to face recognition. IEEE
Trans. Pattern Anal. Mach. Intell. 28(12), 2037–2041 (2006)
6. Zhao, G., Pietika
¨
inen, M.: Dynamic texture recognition using
local binary patterns with an application to facial expressions.
IEEE Trans. Pattern Anal. Mach. Intell. 29(6), 915–928 (2007)
7. Hadid, A., Pietika
¨
inen, M., Li, S.Z.: Learning personal specific
facial dynamics for face recognition from videos. In: Analysis
and Modeling of Faces and Gestures (AMFG 2007), Lecture
Notes in Computer Science, vol. 4778, pp. 1–15 (2007)
8. Zhang, W., Shan, S., Gao, W., Chen, X., Zhang, H.: Local gabor
binary pattern histogram sequence (LGBPHS): A novel non-
statistical model for face representation and recognition. In:
Proceedings of the Tenth IEEE International Conference on
Computer Vision (ICCV’05), 786–791 (2005)
9. Gabor, D.: Theory of communication. J. Inst. Elec. Eng. (J-IEE
London) 93(26), 429–457 (1946)
10. Granlund, G.H.: In search of a general picture processing opera-
tor. Comput. Graph. Image Process. (CGIP) 2, 155–173 (1978)
11. Daugman, J.: Uncertainty relation for resolution in space, spatial
frequency and orientation optimized by two-dimensional visual
cortical filters. J. Opt. Soc. Am. 2(7), 1160–1169 (1985)
12. Ojala, T., Pietika
¨
inen, M., Harwood, D.: A comparative study of
texture measures with classification based on feature distribu-
tions. Pattern Recognition 29, 51–59 (1996)
13. Ojala, T., Pietika
¨
inen, M., Ma
¨
enpa
¨
a
¨
, T.: Multiresolution gray-
scale and rotation invariant texture classification with local
binary patterns. IEEE Trans. Pattern Anal. Mach. Intell. 24,
971–987 (2002)
14. Daugman, J.: High confidence visual recognition of persons by a
test of statistical independence. IEEE Trans. Pattern Anal. Mach.
Intell. 15(11), 1148–1161 (1993)
15. Lades, M., Vorbru
¨
ggen, J.C., Buhmann, J., Lange, J., von der
Malsburg, C., Wu
¨
rtz, R.P., Konen, W.: Distortion invariant
object recognition in the dynamic link architecture. IEEE
Trans. Comput. 42, 300–311 (1993)
Local Surface Patch
A ‘‘local surface patch’’ (LSP) is defined as the region
consisting of a feature point P and its neighbors N. The
LSP representation includes feature point P, its surface
type, centroid of the patch, and a histogram of shape
index values vs. dot product of the surface normal at
point P and its neighbors. A local surface patch is
shown in Fig. 4. The neighbors satisfy the following
conditions,
N ¼fpixels N; k N P kЄ
1
g
and a cosðn
p
n
n
< AÞ;
ð1Þ
where
denotes the dot product between the surface
normal vectors n
p
and n
n
at point P and N and acos
denotes the inverse cosine function. The two para-
meters Є1 and A (Є1 = 5.8 mm, A = 0.5) are important
since they determine the descriptiveness of the local
surface patch representation. A local surface patch is
not computed at every pixel in a range image, but only
at selected feature points. The feature points are de-
fined as the local minimum and the maximum of
shape indexes, which can be calculated from principal
curvatures.
▶ Ear Biometrics, 3D
Localization
▶ Human Detection and Tracking
Localization
L
949
L