Li S.Z., Jain A.K. (eds.) Encyclopedia of Biometrics
Подождите немного. Документ загружается.

Localization Inaccuracy
▶ Face Misalignment Problem
Logical Access Control, Client-Based
Most platforms and peripherals that come w ith em-
bedded fingerprint readers include software to access
the local PC and applicati ons. These applications may
include biometric-based access to the PC, pre-boot
authentication, full disk encryption, Windows logon,
and a general password manager application to facili-
tate the use of biometric for other applications and
websites. Such a suite of applications protects the spe-
cific PC on which it is deployed and makes pers onal
access to data more secure, convenient, and fun. Com-
panies such as Dell, Lenovo, Microsoft, and Hewlett-
Packard ship platforms and peripherals are pre-loaded
with such capability. However, these are end-user uti-
lities with the scope of use only on the local PC. As a
result, they may be challenging and costly to manage if
deployed widely in an enterprise since each user will
need to setup, enroll her biometric, and configure the
appropriate policy, all by herself. Usually the user is
given the option to use the biometric system as a cool
individual convenience, rather than enforced by an
enterprise-wide authentication policy.
▶ Access Control, Logical
Logical Access Control,
Client-Server-Based
The client-server-based logical access control solutions
typically limit the flexibility given to the end-user and
instead focus on the needs of the organization and the
system administrator to deploy, enroll users’ biometric
credentials into the enterprise directory, and centrally
configure enterprise-wide policies. An enterprise-wide
policy, however, drives stronger requirements for the
reliability, security, and interoperability of the biomet-
ric authentication. If it is a busin ess policy that every-
one in the organization must use the biometric system
for authentication, the reliability of the biometric sys-
tem must be higher than a client-side-only solution
where the user can opt-in to use the biometric system
just for convenience. A server-based logical access con-
trol solution generally needs to be interoperable with
data coming from many different biometric readers
since not every platform in the organization will use
the same model of the biometric reader. Interoperabil-
ity can be accomplished at either the enrollment tem-
plate level or the biometric image level. Lastly, since a
server-based solution typically stores biometric cre-
dentials in a central database, the security model of
the whole chain from the reader to the server must be
considered to protect against hackers and maintain
user privacy. However, unlike government deploy-
ments that store the user’s actual biometric image(s)
for archival purposes, a biometric solutio n used for
enterprise authentication typically stores only the bio-
metric enrollment templates.
▶ Access Control, Logical
Logico-Linear Operator
An operation in signal processing that brid ges the gulf
between linear operations, such as filtering, and the
logical calculus of Boolean operators such as AND,
OR, and XOR. In doing so, a logico-linear operator
serves as a kind of signal-to-symbol converter. The input
to the operator is a continuous signal such as a sound
waveform or an image, upon which a linear operation
is performed such as computing some derivative, or
convolving with some filter. The output of the linear
operation is converted into a logical state by, for exam-
ple, comparing to a threshold, noting its sign, quantiz-
ing its phase or its modulus if complex, or some more
abstract binary class ification. The resulting Boolean
quantity can be used as a logical operand for purposes
such as detecting similarity and differences (XOR),
motion between image frames (XOR), region growing
(OR), masking (AND) of some data by other data,
950
L
Localization Inaccuracy
descriptions of complexity or of graph structure, veto-
ing (NAND), machine learning, and so forth. Iris
encoding and recognition is performed through the
use of logico-linear operators.
▶ Iris Encoding and Recognition using Gabor
Wavelets
Logon, Password Management
▶ Access Control, Logical
Luminance
In photometry, luminance is a measure of the density
of illumination describing the amount of light that
passes through or is emitted from a particular area,
and falls within a given solid angle. In the context of
color perception, luminance indicates the perceived
brightness (or lightness) of a given color. In color
spaces that separate the luminance in a separate chan-
nel (such as the Y channel in the YUV color space), the
luminance channel of an image is equivalent to a gray
level version of that image.
▶ Gait Recognition, Motion Analysis for
Luminance
L
951
L

M
Machine-Generated Fingerprint
Classes
Fingerprints are grouped based on some similarity
criteria in the feature space. Fingerprint groups are
formed by machine learning from finge rprint samples
in an unsuper vised manner such as clustering and
binning. Such fingerprint groups are called machine-
generated fingerprint classes. The goal of partitioning
the database into machine-generated fingerprint clas-
ses is to divide the fingerprint population into as many
classes as possible while maximizing the possibility of
placing the fingerprints of a same finger into a same
class in a consistent and reliable way.
▶ Fingerprint Classification
Machine-Learning
A type of algorithm that learns from past experience to
make decisions.
▶ Incremental Learning
▶ Palmprint Matching
Magnification
In optical imaging, the ratio of the dimensions of the
image created by the optical system to the dimensions of
the object that is imaged. The ratio can be less than one.
▶ Iris Device
Mahalanobis Distance
The Mahalanobis distance is based on the covariance
among variables in the feature vectors which are com-
pared. It has the advantage of utilizing group means
and variances for each variable and the problems
of scale and correlation inherent in the Euclidean dis-
tance are no longer an issue. When using Euclidean
distance, the set of points equidistant from a given
location is a sphere. The Mahalanobis distanc e stretches
this sphere to correct the respective scales of different
variables and to account for correlation among variables.
▶ Hand Shape
▶ Signature Matching
Malicious-code-free Operating
System
▶ Tamper-proof Operati ng System
Manifold
Manifold is a non-empty subset M of R
N
such that the
neighborhood of every point p 2 M resembles a Eu-
clidean space. A smooth manifold is associated with a set
of homeomorphisms that map points from open subsets
around every point p to points in open subsets in R
m
,
where
m
is the intrinsic dimensionality of the manifold.
▶ Gait Recognition, Motion Analysis for
▶ Manifold Learning
▶ Non-linear Techniques for Dimension Reduction
#
2009 Springer Science+Business Media, LLC
Manifold Embedding
Any manifold is embedded in an Euclidean space, e.g.,
a sphere in the 3D world is a two-dimensional mani-
fold embedded in a three-dimensional space.
▶ Gait Recognition, Motion Analysis for
Manifold Learning
PHILIPPOS MORDOHAI
1
,GE
´
RARD MEDIONI
2
1
Stevens Institute of Technology, PA, USA
2
University of Southern California, Los Angeles,
CA, USA
Definition
Manifold learning is the process of estimating the
structure of a
▶ manifold from a set of samples, also
referred to as obser vations or instances, taken from the
manifold. It is a subfield of machine learning that
operates in continuous domains and learns from
observations that are represented as points in a Euclid-
ean space, referred to as the
▶ ambient space. This type
of learning, to Mitchell, is termed instance-based or
memory-based learning [1]. The goal of such learning
is to discover the underlying relationships between
observations, on the assumption that they lie in a limited
part of the space, typically a manifold, the
▶ intrinsic
dimensionality of a manifold of which is an indication
of the degrees of freedom of the underlying system.
Introduction
Manifold learning has attracted considerable attention
of the machine learning community, due to a wide
spectrum of applications in domains such as pattern
recognition, data mining, biometrics, function approx-
imation and visualization. If the manifolds are linear,
techniques such as the Principal Component Analysis
(PCA) [2] and Multi-Dimensional Scaling (MDS) [3]
are very effective in discovering the subspace in which
the data lie. Recently, a number of new algorithms that
not only advances the state of the art, but are also
capable of learning nonlinear manifolds in spaces of
very high dimensionality have been reported in the
literature. These include locally linear embedding
(LLE) [4], Isomap [5] and the charting algorithm [6].
They aim at reducing the dimensionality of the input
space in a way that preserves certain geometric or
statistical properties of the data. Isomap, for instance,
preserves the
▶ geodesic distances between all points as
the manifold is ‘‘unfolded’’ and mapped to a space of
lower dimension.
Given a set of observations, which are represented
as vectors, the typical steps of processing are as follows:
Intrinsic dimensionality estimation
Learning structure of the manifold
Dimensionality reduction to remove redundant
dimensions, preserving the learned manifold
structure.
Not all algorithms perform all steps. For instance, LLE
[4] and the Laplacian eigenmaps algorithm [7] require
an estimate of the dimensionality to be provided
externally. The method proposed by Mordohai and
Medioni [8], which is based on tensor voting, does
not reduce the dimensionality of the space, but per-
forms all operations in the original ambient space.
Recent methods used for these tasks are discussed
in this essay. Dimensionality reduction is described in
conjunction with manifold learning since it is often
closely tied with the selected manifold learning algo-
rithm. In addition, research on manifold learning with
applications in biometrics is highlighted.
Intrinsic Dimensionality Estimation
Bruske and Sommer [9] who proposed an approach an
optimally topology preserving map (OTPM) is con-
structed for a subset of the data. Principal Component
Analysis (PCA) is then performed for each node of
the OTPM on the assumption that the underlying
structure of the data is locally line ar. The average of
the number of significant singular values at the nodes
is the estimate of the intrinsic dimensionality.
Ke
´
gl [10] estimated the capacity dimension of
a manifold, which is equal to the topological dimen-
sion and does not depend on the distribution of
the data, using an efficient approximation based on
packing numbers. The algorithm takes into account
954
M
Manifold Embedding
dimensionality variations with scale and is based on a
geometric property of the data. This approach differs
from the PCA-related methods that employ succes-
sive projections to increasingly higher-dimensional sub-
spaces until a certain percentage of the data is explained.
Raginsky and Lazebnik [11] described a family of
dimensionality estimators based on the concept of
quantization dimension. The family is parameterized
by the distortion exponent and includes Ke
´
gl’s method
[10] when the distortion exponent tends to infinity. The
authors demonstrated that small values of the distortion
exponent yield estimators that are more robust to noise.
Costa and Hero [12] estimated the intrinsic dimen-
sion of the manifold and the entropy of the samples.
Using geodesic-minimal-spanning trees, the method,
like Isomap [5], considers global properties of the adja-
cency graph and thus produces a single global estimate.
The radius of the spheres is selected in such a way
that they contain enough points and that the density of
the data contained in them can be assumed constant.
These requirements tend to underestimate of the dimen-
sionality when it is very high.
The method proposed by Mordohai and Medioni
[14] obtains estimates of local intrinsic dimensionality
at the point level. Tensor voting enables the estimation
of the normal subspace of the most salient manifold
passing through each point. The normal subspace is
estimated locally by collecting at each point votes from
its neighbors. Tensor voting is a pairwise operation in
which all points act as voters casting votes to their
neighbors and as receivers collecting votes from their
neighbors . These votes encode geometric information
on the dimensionality and orientation of the local
subspace of the receiver on the assumption that the
voter and receiver belong to the same structure (mani-
fold). The dimensionality of the estimated normal
subspace is given by the maximum gap in the eigenva-
lues of a second order tensor that represents the accu-
mulated votes at the point. The intrinsic dimensionality
of the manifold at the point under consideration is
computed as the dimensionality of the ambient space
minus that of the normal subspace.
Manifold Learning and Dimensionality
Reduction
Scho
¨
lkopf et al. [15] proposed the underlying as-
sumption o f is that if the data lie on a locally linear,
low-dimensional manifold, then each point can be
reconstructed from its neighbors with appropriate
weights. These weights should be the same in a low-
dimensional space, the dimensionality of which is greater
than or equal to the intrinsic dimensionality of the man-
ifold. The LLE algorithm computes the basis of such
a low-dimensional space. The dimensionality of the
embedding, however, has to be given as a parameter,
since it cannot always be estimated from the data. More-
over, the output is an embedding of the given data, but
not a mapping from the ambient to the
▶ embedding
space. The LLE is not isometric and often fails by
mapping distant points close to each other.
Isomap, an extension of the MDS, developed by
Tenenbaum et al. [5] uses geodesic instead of Euclide-
an distances and can thus be applied to nonlinear
manifolds. The geodesic distances between points are
approximated by graph distances. MDS is then applied
to the geodesic distances to compute an embedding
that preserves the property of points to be close or far
away from each oth er. Isomap can handle points not
in the original dataset, and perform interpolation, but
it is limited to convex datase ts.
The Laplacian eigenmaps algorithm, developed by
Belkin and Niyogi [7] computes the normalized graph
Laplacian of the adjacency graph of the input data,
which is an approximation of the Laplace-Beltrami
operator, on the manifold. It exploits locality preserv-
ing properties that were first observed in the field of
clustering. The Laplacian eigenmaps algorithm can be
viewed as a generalization of LLE, since the two be-
come identical when the weights of the graph are
chosen according to the criterion of the latter. As in
the case of the LLE, the dimensionality of the manifold
also has to be provided, the computed embeddings are
not isometric and a mapping between the two spaces
is not produced.
Donoho and Grimes [16] proposed the Hessian
LLE (HLLE), an approach similar to the Laplacian
eigenmaps. It computes the Hessian instead of the
Laplacian of the graph. The authors alleged that the
Hessian is better suited than the Laplacian for detect-
ing linear patches on the manifold. The major contri-
bution of this approach is that it proposes a global,
isometric method, which, unlike the Isomap, can be
applied to non-convex datasets. The need to estimate
second derivatives from possibly noisy, discrete data
makes the algorithm more sensitive to noise than the
others approaches.
Manifold Learning
M
955
M

Other related research includes the charting
algorithm of Brand [6], which computes a pseudo-
invertible mapping of the data as well as the intrinsic
dimensionality of the manifold. The dimensionality is
estimated by examining the rate of growth of the num-
ber of points contained in hyper-spheres as a function of
the radius. Linear patches, areas of curvature and noise
can be correctly classified using the proposed measure.
At a subsequent stage, a global coordinate system for
the embedding is defined. This produces a mapping
between the input space and the embedding space.
Weinberger and Saul [17] developed Semidefinite
Embedding (SDE) which addresses manifold learning
by enforcing local isometry . The lengths of the sides of
triangles formed by neighboring points are preserved
during the embedding. These constraints can be
expressed in terms of pairwise distances and the optimal
embedding can be found by semidefinite programming.
The method is computationally demanding, but can reli-
ably estimate the underlying dimensionality of the inputs
by locating the largest gap between the eigen values of the
Gram matrix of the outputs. As in the case of the authors’
approach , this estimate does not require a threshold.
The method for manifold learning described [8]by
Mordohai and Medioni [8] is based on inferring the
geometric properties of the manifold locally via tensor
voting. An estimate of the local tangent space allows one
to traverse the manifold estimating geodesic distances
between points and generating novel observations on the
manifold. In this method it is not necessary that the
manifold is differentiable, or even connected. It can
process data from intersecting manifolds with different
dimensionality and is very robust to outliers. Unlike
most of the other approaches, the authors did not per-
form dimensionality reduction, but conducted all opera-
tions in the ambient space instead. If dimensionality
reduction is desired for visualization or memory saving,
any technique can be applied after this.
Applications
There are two main areas of application of manifold
learning techniques in biometrics: estimation of the
degrees of freedom of the data and visualization.
Given labeled data, the degrees of freedom can be
separated into those that are related to the identity of
the subject and those that are due to other factors, such
as pose. Visualization is enabled by reducing the
dimensionality of the data to two or three to generate
datasets suitable for display. This can be achieved by
selecting the most relevant dimensions of the manifold
and mapping them to a linear 2-D or 3-D space.
An example of both visualization and estimation of
the important mode s of variability of face images has
been discussed by [4]. The input is a set of images of the
face of a single person undergoing expression and view-
point changes. The images are vectorized, that is the
pixels of each 28*20 image are stacked to form a 560-D
vector, and used as observations. LLE is able to deter-
mine the two most dominant degrees of freedom which
are related to head pose and expression variations.
Embedding the manifold from the 560-D ambient
space to a 2-D space provides a visualization in which
similar images appear close to each other. Similar experi-
ments have been described in Tenenbaum et al. [5].
Prince and Elder [18] addressed the issue of face
recognition from a manifold learning perspective by
creating invariance to degrees of freedom that do not
depend on identity. They labeled these degrees of free-
dom, namely, pose and illumination, ‘‘nuisance para-
meters’’ and were able to isolate their effects using a
training dataset in which the value of the nuisance para-
meters is known and each individual has at least two
different values of each nuisance parameter. The images
are converted to 32 32 and subsequently to 1024-D
vectors. Varying a nuisance parameter generates a mani-
fold, which has little value for recognition. Therefore,
once these manifolds are learned, their observations are
mapped to a single point, which corresponds to the
identity of the imaged person, in a new space.
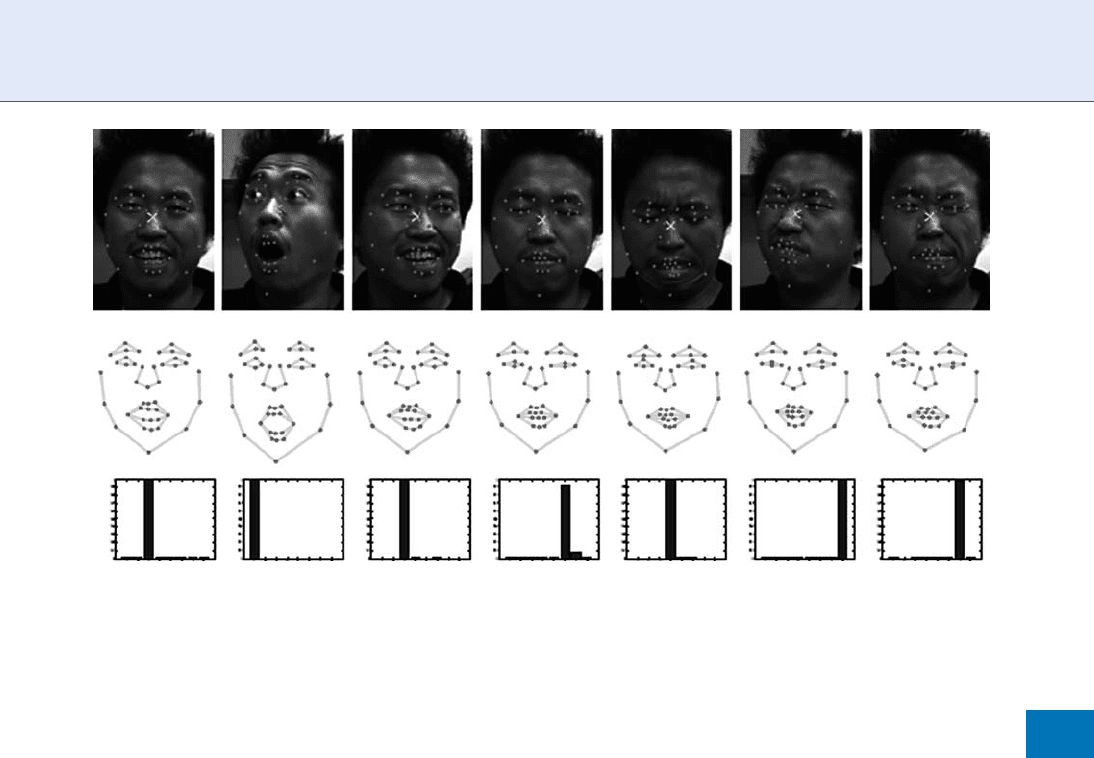
Liao and Medioni [19] studied face tracking and
expression inference from video sequences using tensor
voting to learn manifolds that corr espond to basic expres-
sions, such as smile and surprise. During training, land-
mark points are tracked in the video sequence and their
3-D positions are obtained using a 3-D model of the head.
Facial deformation manifolds are learned from labeled
sequences of the basic expressions. A parameter that cor-
responds to the magnitude of the expression is estimated
for each frame. During testing, the observation vector is
the position of the landmarks and the goal is to jointly
estimate head pose and the magnitude of each expression.
This is accomplished by computing the probability that
the observation was generated by each manifold. The
posterior probability is inferred using a combination
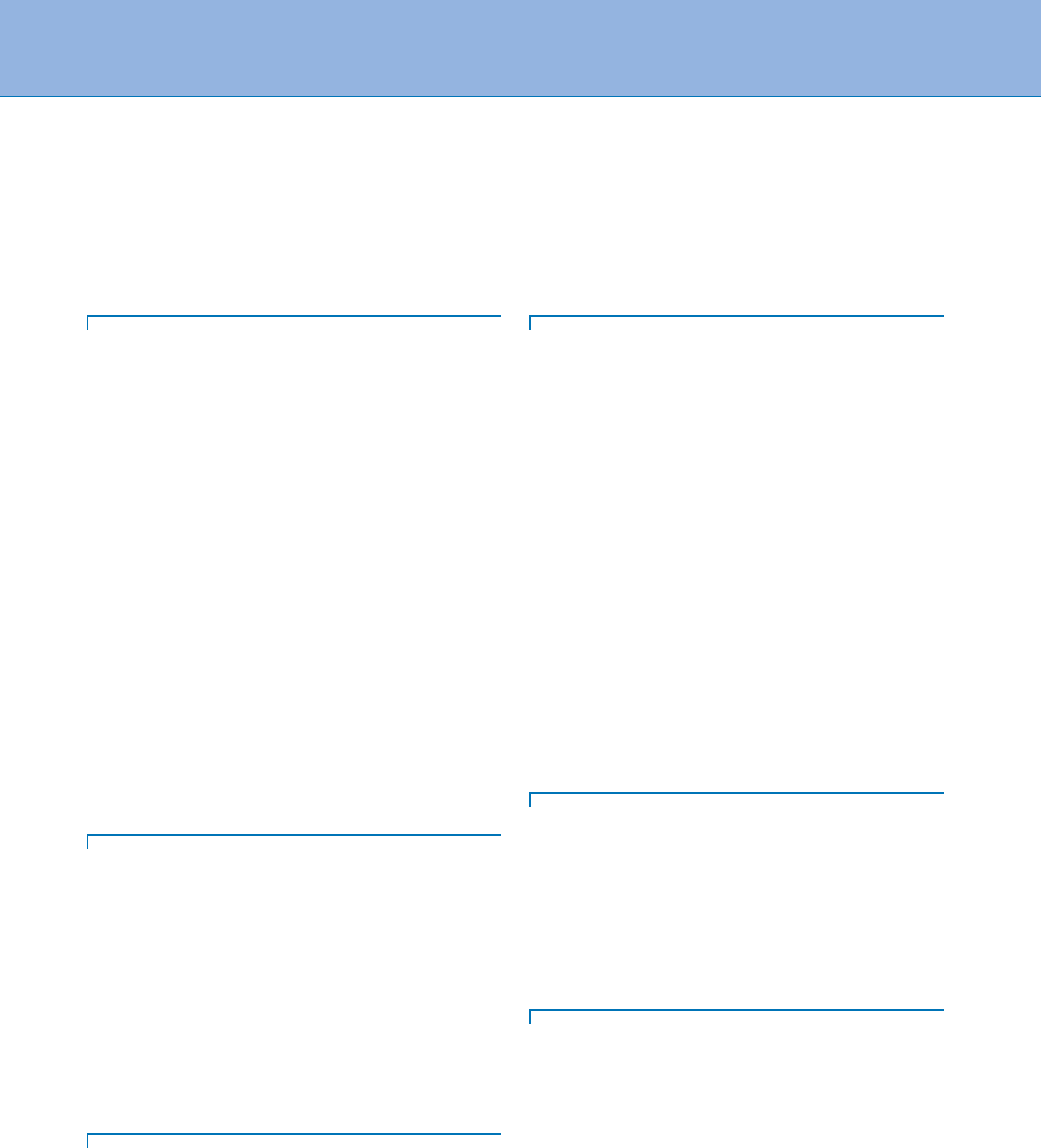
model of all manifolds. Some results of deformable track-
ing and expression inference are presented in Fig. 1.
956
M
Manifold Learning
Summary
Manifold learning techniques have attracted consider-
able attention in the last few years, because of their
ability to untangle information in high dimensional
spaces and reveal the degrees of freedom of the under-
lying process. This essay presents an overview of the
state of the ar t in intrinsic dimensionality estimation
and manifold learning. These algorithms can be de-
ployed in the field of biometrics, where high dimension-
al data exist in large volumes, to discover and learn the
dimensionality and local structure of manifolds formed
by biometric measurements. Different observations on
the manifold are due to variations in identity or other
factors, which may be unimportant for many applica-
tions. Given training data, in which variations between
samples have been labeled according to the factor that
caused them, manifold learning techniques can estimate
a mapping from a measurement to identity, pose, facial
expression or any other variable of interest.
Related Entries
▶ Kernel Methods
▶ Machine-Learning
▶ Classifier Design
▶ Probability Distribution
References
1. Mitchell, T.: Machine Learning. McGraw-Hill, New York (1997)
2. Jolliffe, I.: Principal Component Analysis. Springer, New York
(1986)
3. Cox, T., Cox, M.: Multidimensional Scaling. Chapman & Hall,
London (1994)
4. Roweis, S., Saul, L.: Nonlinear dimensionality reduction by
locally linear embedding. Science 290, 2323–2326 (2000)
5. Tenenbaum, J., de Silva, V., Langford, J.: A global geometric
framework for nonlinear dimensionality reduction. Science
290, 2319–2323 (2000)
6. Brand, M.: Charting a manifold. In: Advances in Neural Infor-
mation Processing Systems 15, pp. 961–968. MIT, Cambridge,
MA (2003)
7. Belkin, M., Niyogi, P.: Laplacian eigenmaps for dimensionality
reduction and data representation. Neural Comput. 15(6),
1373–1396 (2003)
8. Mordohai, P., Medioni, G.: Tensor Voting: A Perceptual Organi-
zation Approach to Computer Vision and Machine Learning.
Morgan & Claypool, San Rafael, CA (2006)
9. Bruske, J., Sommer, G.: Intrinsic dimensionality estimation with
optimally topology preserving maps. IEEE Trans. Pattern Analy.
Mach. Intell. 20(5), 572–575 (1998)
10. Ke
´
gl, B.: Intrinsic dimension estimation using packing numbers.
In: Advances in Neural Information Processing Systems 15,
pp. 681–688. MIT, Cambridge, MA (2003)
Manifold Learning. Figure 1 Top row: Some frames from test video sequences [19]. Middle row: Visualization of the
positions of the landmarks that show the estimated pose as well as the estimated deformation that corresponds to the
inferred magnitude of each expression. Bottom row: Probability of basic expressions. Since each frame corresponds to a
single expression, only one model in the mixture has a high probability.
Manifold Learning
M
957
M
11. Raginsky, M., Lazebnik, S.: Estimation of intrinsic dimensional-
ity using high-rate vector quantization. In: Advances in Neural
Information Processing Systems 18, pp. 1105–1112. MIT,
Cambridge, MA (2006)
12. Costa, J., Hero, A.: Geodesic entropic graphs for dimension and
entropy estimation in manifold learning. IEEE Trans. Signal
Process 52(8), 2210–2221 (2004)
13. Levina, E., Bickel, P.: Maximum likelihood estimation of intrin-
sic dimension. In: Advances in Neural Information Processing
Systems 17, pp. 777–784. MIT, Cambridge, MA (2005)
14. Mordohai, P., Medioni, G.: Unsupervised dimensionality esti-
mation and manifold learning in high-dimensional spaces by
tensor voting. International Joint Conference on Artificial Intel-
ligence (2005)
15. Scho
¨
lkopf, B., Smola, A., Mu
¨
ller, K.R.: Nonlinear component
analysis as a kernel eigenvalue problem. Neural Comput. 10(5),
1299–1319 (1998)
16. Donoho, D., Grimes, C.: Hessian eigenmaps: new tools for
nonlinear dimensionality reduction. In: Proceedings of National
Academy of Science, pp. 5591–5596 (2003)
17. Weinberger, K.Q., Saul, L.K.: Unsupervised learning of image
manifolds by semidefinite programming. Int. J. Comput. Vis.
70(1), 77–90 (2006)
18. Prince, S., Elder, J.: Creating invariance to ‘nuisance parameters’
in face recognition. In: International Conference on Computer
Vision and Pattern Recognition, II: pp. 446–453 (2005)
19. Liao, W.K., Medioni, G.: 3D face tracking and expression inference
from a 2D sequence using manifold learning. In: International
Conference on Computer Vision and Pattern Recognition (2008)
Manual Annotation
The manual annotation or description of an outsole
involves a trained professional assigning a number of
predefined pattern descriptors to the tread pattern.
The palette of available descriptors is usually quite
small and somewhat general or abstract in interpreta-
tion. For example, there may be descriptor terms such
as wavy, linked, curved, zig zag, circular, simple geo-
metric, and complex. This makes the annotation task
quite subjective and inconsistent and hence must be
complete by trained professionals.
▶ Footwear Recognition
Margin Classifier
▶ Support Vector Machine
Markerless 3D Human Motion
Capture from Images
P. F UA
EPFL, IC-CVLab, Lausanne, Switzerland
Synonyms
Motion recovery 3D; Video-based motion capture
Definition
Markerless human motion capture from images entails
recovering the successive 3D poses of a human body
moving in front of one or more cameras, which should
be achieved without additional sensors or markers
to be worn by the person. The 3D poses are usually
expressed in terms of the joint angles of a kinematic
model including an articulated skeleton and volumet-
ric primitives designed to approximate the body shape.
They can be used to analyze, modify, and re-synthesize
the motion. As no two people move in exactly the same
way, they also constitute a signature that can be used
for identification purposes.
Introduction
Understanding and recording human and other verte-
brate motion from images is a longstanding interest.
In its modern form, it goes back at least to Edward
Muybridge [1] and Etienne-Jules Marey [2] in the
nineteenth centur y. They can be considered as the pre-
cursors of human motion and animal locomotion
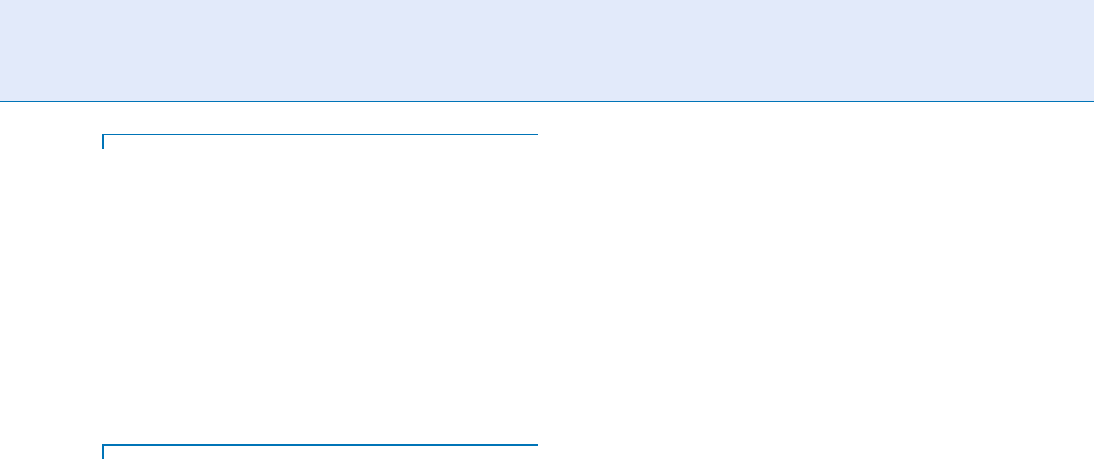
analysis from video. Muybridge used a battery of pho-
tographic cameras while Marey designed an early
‘‘video camera’’ to capture motions such as the one of
Fig. 1a. In addition to creating beautiful pictures, they
pioneered image-based motion capture, motion anal-
ysis, and motion measurements.
Today, more than 100 years later, automating this
process remains an elusive goal because humans
have a complex ar ticulated geometry overlaid with
deformable tissues, skin, and loose clothing. They
move constantly, and their motion is often rapid,
complex, and self-occluding. Commercially avail-
able
▶ motion capture systems are cumbersome or
958
M
Manual Annotation

expensive or both because they rely on infra-red
or magnetic sensors, lasers, or targets that must be
worn by the subject. Furthermore, they usually work
best in controlled environments. Markerless video-
based systems have the potential to address these
problems but, until recently, they have not been reli-
able enough to be used practically. This situation
is now changing and they are fast becoming an attrac-
tive alternative.
Video-based motion capture is comparatively simpler
if multiple calibrated cameras can be used simultaneously .
In particular, if camera motion and background scenes
are controlled, it is easy to extract the body outlines.
These techniques can be very effective and commercial
systems are now available. By contrast, in natural scenes
with cluttered backgrounds and significant depth vari-
ation, the problem remains very challenging, especially
when a single camera is used. However, it is worth
addressing because solving it will result in solutions
far easier to deploy and more generally applicable
than the existing ones.
Success will make it possible to routinely use video-
based motion capture to recognize people and charac-
terize their motion for biometric purposes. It will also
make our interaction with computers, able to perceive
our gestures much more natural; allow the quantitati ve
analysis of the movements ranging from those of ath-
letes at sports events to those of patients whose
locomotive skills are impaired; useful to capture mo-
tion sequences outside the laboratory for realistic ani-
mation and sy nthesis purposes; make possible the
analysis of people’s motion in a surveillance context;
or facilitate the indexing of visual media. In short, it
has many potential mass-market applications.
Methodology
This section briefly reviews the range of techniques
that have be en developed to overcome the difficulties
inherent to 3D body motion modeling from images.
This modeling is usually done by recovering the joint
angles of a
▶ kinematic model that represents the
subject’s body, as shown in Fig. 1d. The author dis-
tinguishes between multi-camera and single-camera
techniques because the former are more robust but
require much more elaborate setups, which are not
necessarily appropriate for biometrics applications.
This section also discusses the use of
▶ pose and
motion mode ls, which have proved very effective at
disambiguating difficult situations. For all the techni-
ques introduced a few representative papers are listed.
However, the author does not attempt to be exhaustive
to prevent the reference list of this essay from contain-
ing several hundred entries. For a more extensive
analysis, please refer [3, 4].
Markerless 3D Human Motion Capture from Images. Figure 1 Two centuries of video-based motion capture.
(a) Chronophotography by Marey at the end of the nineteenth century [2]. (b) Multi-camera setup early in the twenty-first
century with background images at the top and subject’s body outline overlaid in white at the bottom [3]. (c)Video
sequence with overlaid body outlines and corresponding visual hulls [3]. (d) Articulated skeleton matched to the visual hulls [3].
Markerless 3D Human Motion Capture from Images
M
959
M