Михайлов В.С, Кудрявцев В.Г, Давыдов В.С. Навигация и лоция
Подождите немного. Документ загружается.

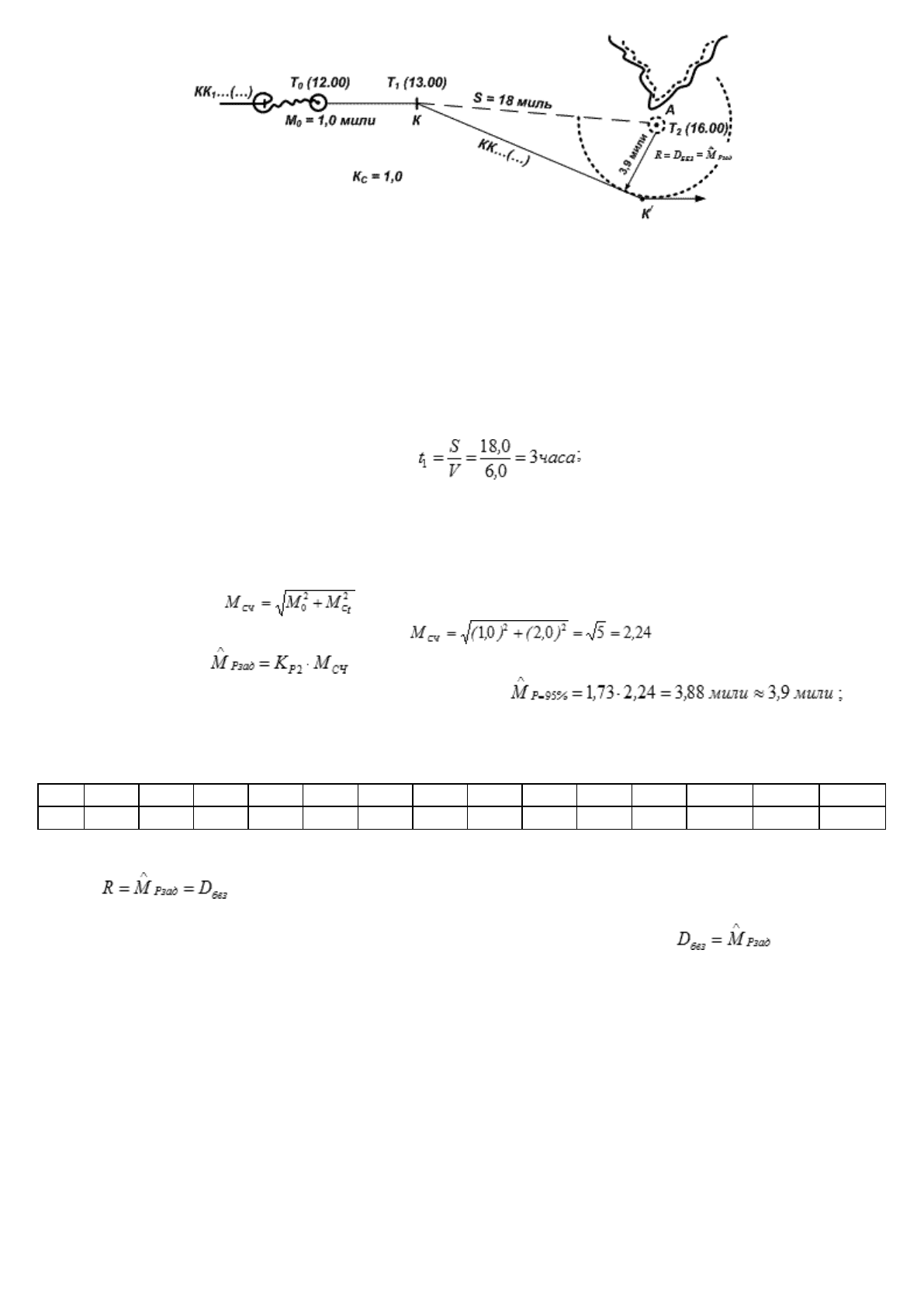
Рис. 24.16. Расчет курса на расхождение с навигационной опасностью с заданной вероятностью
Для решения этой задачи необходимо:
• исходную (упреждающую) точку К, в которой предполагается изменить курс для безопасного
расхождения с навигационной опасностью, соединить с навигационной опасностью (точкой А);
• снять с путевой карты расстояние от исходной точки К до навигационной опасности А (S = 18,0
мили);
• рассчитать, сколько потребуется времени, чтобы судно, следуя заданной скоростью (V = 6,0 уз.)
прошло это расстояние (S = 18,0 мили):
• рассчитать судовое время прихода в точку А: Т
2
= Т
1
+t
1
= 13.00 + 3.00 = 16.00;
• рассчитать время плавания по счислению, т.е. время плавания судна от последней, принятой к
счислению, обсервации (точки Т
0
) до точки А: t = Т
2
– Т
0
= 16.00 – 12.00 = 4 часа;
• по формуле: M
Ct
= K
C
· √t (если t > 2 ч), или по формуле: M
Ct
= 0,7 · K
C
· t (если t ≤ 2 ч) рассчитать
радиальную (круговую) СКП счисления: M
Ct
= 1,0 · √4 = 2,0 мили; (K
C
= 1,0)
• по формуле: рассчитать радиальную (круговую) СКП счислимого места,
которую будет иметь судно в точке А: мили;
• по формуле рассчитать предельную (с заданной вероятностью) радиальную
погрешность счислимого места судна для точки А:
Коэффициент по заданной вероятности
Таблица 24.2
Р
зад
0,30
0,50
0,60
0,63
0,70
0,80
0,90
0,95
0,96
0,98
0,99
0,993
0,997
0,999
К
Р2
0,6
0,83
0,96
1,0
1,1
1,27
1,53
1,73
1,8
2,0
2,15
2,23
2,41
3,0
• от навигационной опасности (точки А) провести на путевой МНК дугу окружности радиусом
(для нашего примера D
без
= 3,88 мили ≈ 3,9 мили);
• от исходной точки К провести касательную к окружности и снять ее направление – искомый
истинный курс ИК, которым судно пройдет навигационная опасность в (3,9мили);
• рассчитать значение компасного курса: КК = ИК – ΔК и, в момент прихода судна в исходную
точку К – задать его рулевому;
• рассчитать время, когда судно может (после прохода навигационной опасности на D
без
) лечь на
прежний курс КК
1
→ в точке К′.
24.4. Расчет периодичности определения места судна для обеспечения заданной
точности плавания
При необходимости узнать – через какое время необходимо определять место судна в заданном
районе, чтобы погрешность текущего места не превысила бы какую-то заданную (допустимую)
погрешность (М
зад
) с заданной вероятностью, поступают следующим образом (рис. 24.17):
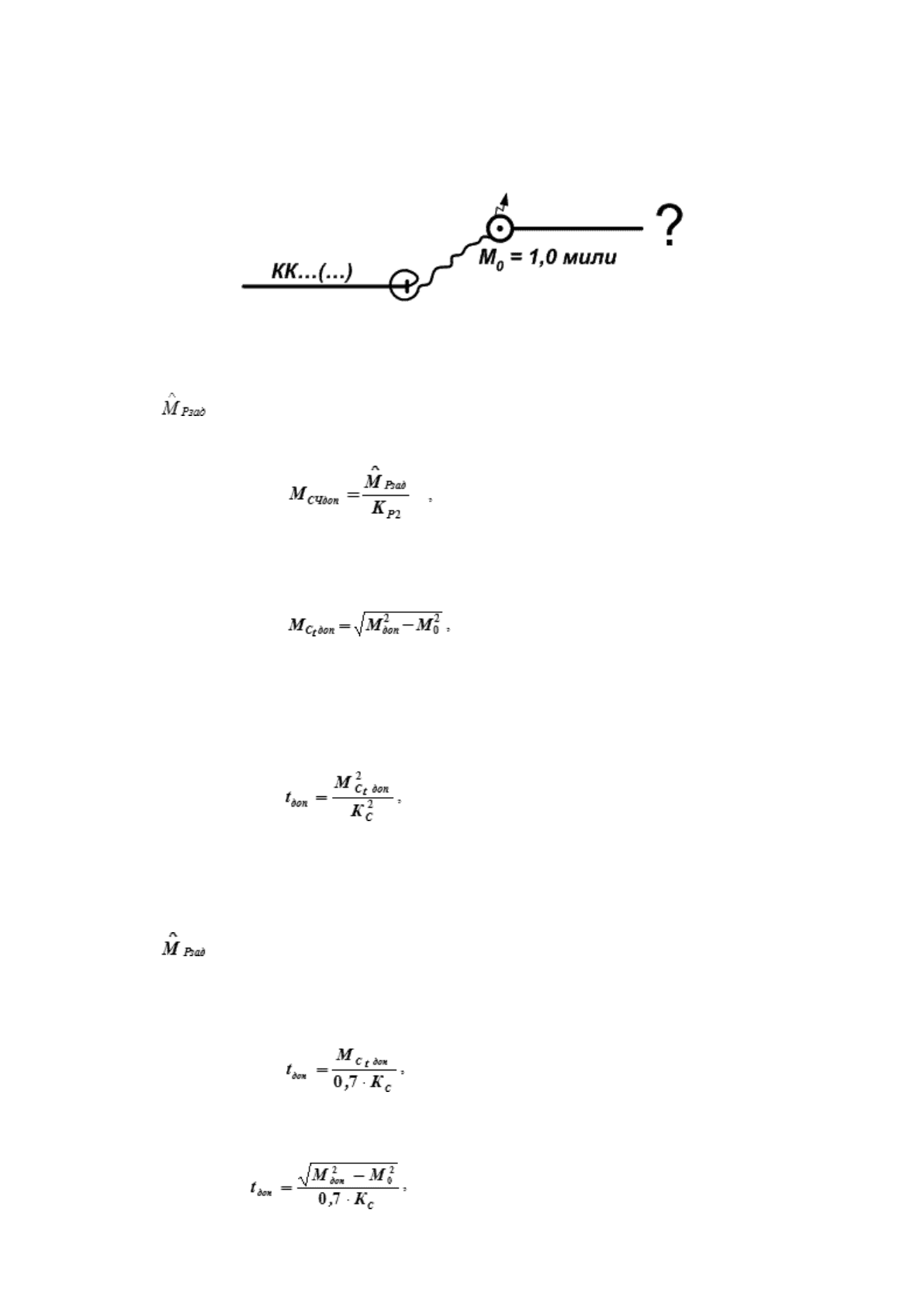
Рис. 24.17. Расчет периодичности определения места
• уточняют заданную предельную радиальную (круговую) погрешность места судна в данном
районе с заданной вероятностью (Р
зад
);
• по формуле:
(24.6)
• рассчитывают допустимую радиальную СКП счисления (счислимого) места судна М
СЧдоп
*;
• по формуле:
(24.7)
• рассчитывают допустимую радиальную СКП счисления M
Ctдоп
**, где М
0
– радиальная СКП
последнего, принятого к счислению обсервованного места (при М
доп
= 2,0 мили и М
0
= 1,0 мили →
M
Ctдоп
= 1,73 мили);
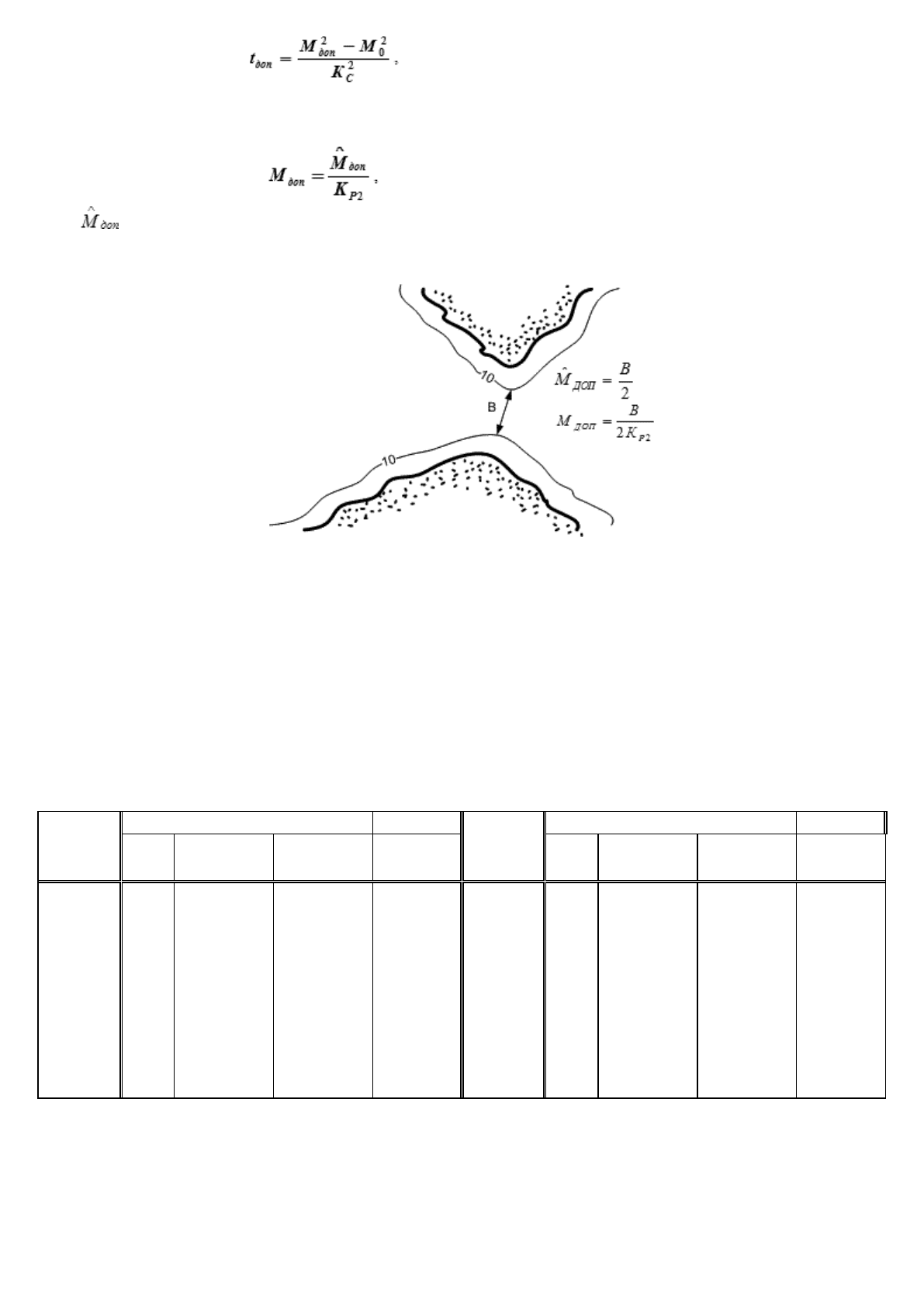
• по формуле:
(24.8)
• рассчитывают допустимое время плавания по счислению – t
доп
(при M
Ctдоп
= 1,7 мили и К
С
= 1,0 →
t
доп
= 2,99 часа ≈ 3 часа).
(*) – (при = 3,5 мили и Р
зад
= 96% (К
Р2
= 1,8) → М
СЧдоп
= 1,94 ≈ 2,0 мили).
(**) – (при М
СЧдоп
= 2,0 мили и М
0
= 1,0 мили → М
Сtдоп
= 1,7 мили).
Если допустимое время плавания по счислению t
доп
получается < 2 часов, то расчет его следует
производить не по формуле (24.8), а по формуле:
(24.9)
(при М
Сtдоп
= 0,7 мили и К
С
= 1,0 → t
доп
= 1 час).
Таким образом, формулами для расчета периодичности определения места судна для обеспечения
заданной точности плавания являются:
если t
доп
≤ 2 часа
(24.10)
если t
доп
> 2 часов
(24.11)
где
М
0
– радиальная СКП последнего, принятого с счислению, обсервованного места;
М
доп
– допустимая радиальная СКП (Р = 63%) для данного района:
(24.12)
где
– предельная радиальная допустимая погрешность плавания в данном районе с заданной
вероятностью (Р
зад
,%);
К
Р2
– коэффициент по заданной вероятности (Р
зад
,%) → см. табл. 24.2
Рис. 24.18. Расчет допустимой точности плавания по фарватерам, каналам, узкостям
При плавании по фарватерам, каналам, а также при проходе узкостей (рис. 24.18) допустимая
точность плавания не должна превышать половины ширины фарватера, канала, узкости, измеренной
между безопасными изобатами или другими препятствиями.
Задачи на расчет допустимого времени плавания по счислению
Рассчитать допустимое время плавания по счислению (t
доп
), чтобы не превысить допустимое
значение радиальной СКП (М
доп
), если радиальная СКП последней, принятой к счислению обсервации
(М
0
), а коэффициент точности счисления (К
C
) (значения К
C
, М
0
, М
доп
→ см. условия задач 1÷10).
№
задач
Условие
Ответ
№
задач
Условие
Ответ
К
C
М
0
(мили)
М
доп
(мили)
t
доп
(мин)
К
C
М
0
(мили)
М
доп
(мили)
t
доп
(мин)
1
2
3
4
5
6
7
8
9
10
0,5
0,5
0,6
0,6
0,7
0,7
0,8
0,8
0,9
0,9
0,5
0,9
0,2
0,6
0,4
0,7
0,1
0,6
0,3
0,3
2,0
1,0
0,3
1,2
0,7
1,4
0,3
1,4
0,4
1,5
900
75
32
180
70
180
30
150
25
160
11
12
13
14
15
16
17
18
19
20
1,2
1,2
1,3
1,3
1,4
1,4
1,5
1,5
1,6
1,6
0,1
0,5
0,2
0,7
0,1
0,2
0,2
0,4
0,2
0,8
0,3
1,9
0,3
2,0
0,5
2,0
0,4
1,8
0,5
1,5
20
140
15
125
30
121
20
100
25
70
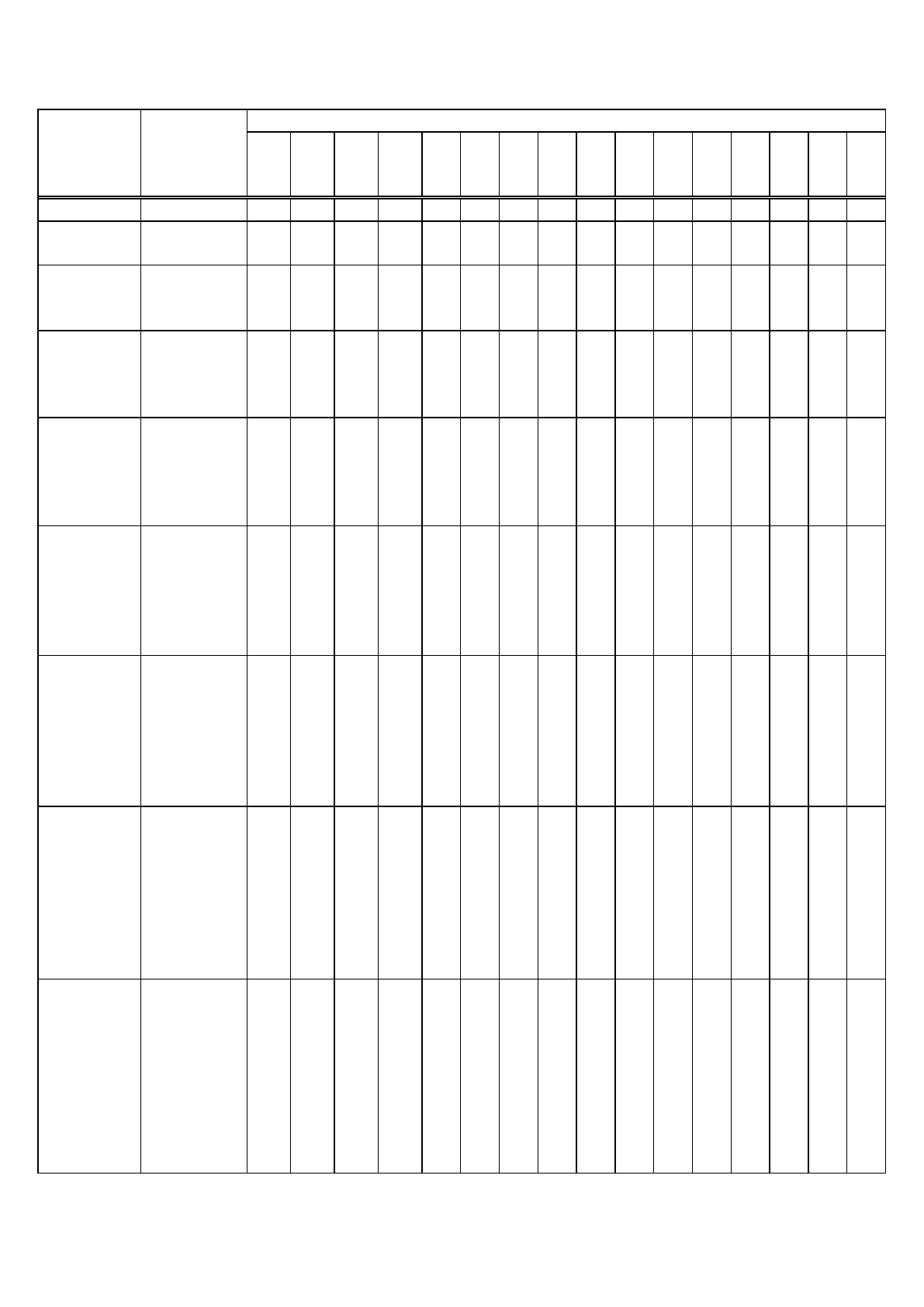
Периодичность определений места судна (мин.)
(допустимое время плавания по счислению)
Таблица 24.3
D
кр
до
опасности
(мили)
М
доп
(мили)
М
0
(мили)
Коэффициент точности счисления (К
C
)
0,5 0,6 0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2,0
10
0,2/0,1
30
25
21
19
16
15
13
12
11
11
10
9
9
8
8
7
15
0,3/0,1
0,3/0,2
48
38
40
32
35
27
30
24
27
21
24
19
22
17
20
16
19
15
17
14
16
13
15
12
14
11
13
11
13
10
12
10
20
0,4/0,1
0,4/0,2
0,4/0,3
66
59
45
55
49
38
47
42
32
41
37
28
37
33
25
33
30
23
30
27
21
28
25
19
26
23
17
24
21
16
22
20
15
21
19
14
20
17
13
18
16
13
17
16
12
17
15
11
25
0,5/0,1
0,5/0,2
0,5/0,3
0,5/0,4
84
78
68
51
70
65
57
43
60
55
49
37
52
49
43
32
47
44
38
29
42
39
34
26
38
36
31
23
35
33
29
21
32
30
26
20
30
28
24
18
28
26
23
17
26
25
21
16
25
23
20
15
23
22
19
14
22
21
17
14
21
20
17
13
30
0,6/0,1
0,6/0,2
0,6/0,3
0,6/0,4
0,6/0,5
101
97
89
77
57
85
81
74
64
47
72
69
64
55
41
63
61
56
48
36
56
54
49
43
32
51
48
45
38
28
46
44
40
35
26
42
40
37
32
24
39
37
34
29
22
36
35
32
27
20
34
32
30
26
20
32
30
28
24
18
30
29
26
23
17
28
27
25
21
16
27
26
23
20
15
25
24
22
19
14
35
0,7/0,1
0,7/0,2
0,7/0,3
0,7/0,4
0,7/0,5
0,7/0,6
118
115
108
98
84
62
99
96
90
82
70
52
85
82
77
70
60
44
74
72
68
62
52
39
66
64
60
55
47
34
59
57
54
49
42
31
54
52
49
45
38
28
49
48
45
41
35
26
46
44
42
38
32
24
42
41
39
35
30
22
40
38
36
33
28
21
37
36
34
31
26
19
35
34
32
29
25
18
33
32
30
27
23
17
31
30
29
26
22
16
30
29
27
25
21
15
40
0,8/0,1
0,8/0,2
0,8/0,3
0,8/0,4
0,8/0,5
0,8/0,6
0,8/0,7
151
144
132
119
107
91
66
113
111
106
99
89
76
55
97
95
91
85
76
65
47
85
83
79
74
67
57
41
76
74
71
66
59
50
37
68
66
64
59
54
45
33
62
60
58
54
49
41
30
57
55
53
49
45
38
28
52
51
49
46
41
35
26
49
47
45
42
38
32
24
45
44
42
40
36
30
22
43
41
40
37
33
28
21
40
39
37
35
31
27
20
38
37
35
33
30
25
18
36
35
33
31
28
24
17
34
33
32
30
27
23
17
45
0,9/0,1
0,9/0,2
0,9/0,3
0,9/0,4
0,9/0,5
0,9/0,6
0,9/0,7
0,9/0,8
192
185
173
156
134
108
97
71
133
128
120
115
107
96
81
59
110
107
104
99
92
82
69
50
96
94
91
86
80
72
61
44
85
84
81
77
71
64
54
37
77
75
73
69
64
57
48
35
70
68
66
63
58
52
44
32
64
63
61
58
53
48
40
29
59
58
56
53
49
44
37
24
55
54
52
49
46
41
35
25
51
50
48
46
43
38
32
24
48
47
45
43
40
36
30
21
45
44
43
41
38
34
29
21
43
42
40
38
36
32
27
20
40
40
38
36
34
30
26
19
38
38
36
35
32
29
24
18
50
1,0/0,1
1,0/0,2
1,0/0,3
1,0/0,4
1,0/0,5
1,0/0,6
1,0/0,7
1,0/0,8
1,0/0,9
238
230
218
202
180
154
122
103
75
165
160
152
140
125
114
102
86
62
121
120
117
112
106
98
87
73
53
107
105
102
98
93
86
77
64
47
95
93
91
87
82
76
68
57
42
85
84
82
79
74
69
61
51
37
78
76
74
71
67
62
56
47
34
71
70
68
65
62
57
51
43
31
66
65
63
60
57
53
47
40
29
61
60
58
56
53
49
44
37
27
57
56
55
52
49
46
41
34
25
53
52
51
49
46
43
38
32
23
50
49
48
46
44
40
36
30
22
47
46
45
44
41
38
34
29
21
45
44
43
41
39
36
32
27
20
43
42
41
39
37
34
31
26
19
55
1,1/0,1
1,1/0,2
1,1/0,3
1,1/0,4
1,1/0,5
1,1/0,6
1,1/0,7
1,1/0,8
1,1/0,9
1,1/1,0
288
281
269
252
230
204
173
137
108
79
200
195
187
175
160
142
120
108
90
65
147
143
137
129
120
113
104
92
77
56
117
116
113
110
105
99
91
79
68
49
104
103
101
98
93
88
81
71
60
44
94
93
91
88
84
79
73
65
54
39
85
84
82
80
76
72
66
59
49
36
78
77
76
73
70
66
61
54
45
33
72
71
70
68
65
61
56
50
42
30
67
66
65
63
60
56
52
46
39
28
63
62
60
59
56
53
48
43
36
26
59
58
57
55
52
49
45
40
34
25
55
54
53
52
49
46
43
38
32
23
52
51
50
49
47
44
40
36
30
22
49
49
48
46
44
42
38
34
29
21
47
46
45
44
42
40
36
32
27
20
60
1,2/0,1
1,2/0,2
1,2/0,3
1,2/0,4
1,2/0,5
1,2/0,6
1,2/0,7
1,2/0,8
1,2/0,9
1,2/1,0
1,2/1,1
343
336
324
307
286
259
228
192
151
114
82
238
233
225
213
198
180
158
133
113
95
69
175
171
165
157
146
132
119
110
97
81
59
134
131
127
120
117
111
104
96
85
71
51
114
113
111
108
104
99
93
85
76
63
46
102
101
100
97
94
89
84
77
68
57
41
93
92
91
88
85
81
76
70
62
52
37
85
85
83
81
78
74
70
64
57
47
34
79
78
77
75
72
69
64
59
52
44
32
73
72
71
69
67
64
60
55
49
41
29
68
67
66
65
62
59
56
51
45
38
27
64
63
62
61
58
56
52
48
43
36
26
60
60
59
57
55
52
49
45
40
33
24
57
56
55
54
52
49
46
43
38
32
23
54
53
52
51
49
47
44
40
36
30
22
51
51
50
48
46
45
42
38
34
28
21
65
1,3/0,1
1,3/0,2
1,3/0,3
1,3/0,4
1,3/0,5
1,3/0,6
1,3/0,7
1,3/0,8
1,3/0,9
1,3/1,0
1,3/1,1
1,3/1,2
403
396
384
367
346
319
288
252
211
166
119
86
280
275
267
255
240
222
200
175
130
119
99
71
206
202
196
187
176
163
147
129
115
102
85
61
158
155
150
143
135
125
117
110
101
89
74
54
124
122
120
118
114
110
104
98
89
79
66
48
111
110
108
106
103
99
94
88
80
71
59
43
101
100
99
96
94
90
85
80
73
65
54
39
93
92
90
88
86
82
78
73
67
59
49
36
85
85
83
82
79
76
72
68
62
55
46
33
79
79
77
76
73
71
67
63
57
51
42
31
74
73
72
71
69
66
63
59
54
47
40
29
69
69
68
66
64
62
59
55
50
44
37
27
66
65
64
62
61
58
55
52
47
42
35
25
62
61
60
59
57
55
52
49
45
40
33
24
58
58
57
56
54
52
49
46
42
37
31
23
56
55
54
53
51
49
47
44
40
36
30
21
70
1,4/0,1
1,4/0,2
1,4/0,3
1,4/0,4
1,4/0,5
1,4/0,6
1,4/0,7
1,4/0,8
1,4/0,9
1,4/1,0
1,4/1,1
1,4/1,2
1,4/1,3
468
458
449
432
410
384
353
317
276
230
180
125
89
325
320
312
300
285
267
245
220
192
160
125
103
74
239
235
229
220
209
196
180
162
141
120
106
88
64
183
180
175
169
160
150
138
127
115
105
93
77
56
144
142
139
133
127
120
115
109
102
93
82
69
49
120
119
117
115
112
108
104
98
92
84
74
62
41
109
108
107
105
102
99
94
90
84
76
67
56
40
100
99
98
96
93
90
87
82
77
70
62
52
37
92
91
90
88
86
83
80
76
71
65
57
48
34
85
85
84
82
80
77
74
70
66
60
53
44
32
80
79
78
77
75
72
69
66
61
56
49
41
30
75
74
73
72
70
68
65
62
57
52
46
39
28
70
70
69
68
66
64
61
58
54
49
44
36
26
66
66
65
64
62
60
56
55
51
47
41
34
25
63
63
62
61
59
57
55
52
48
44
39
33
23
60
59
58
57
56
54
52
49
46
42
37
31
22
75
1,5/0,1
1,5/0,2
1,5/0,3
1,5/0,4
1,5/0,5
1,5/0,6
1,5/0,7
1,5/0,8
1,5/0,9
1,5/1,0
1,5/1,1
1,5/1,2
1,5/1,3
1,5/1,4
538
530
518
502
480
454
422
386
346
300
250
194
134
92
373
368
360
348
333
315
293
268
240
208
173
135
107
77
274
271
264
256
245
231
216
197
176
153
127
110
92
66
210
207
203
196
188
177
165
151
135
120
109
96
80
58
166
164
160
155
148
140
130
119
114
106
97
86
71
51
134
133
130
125
120
118
114
109
103
96
87
77
64
46
117
116
115
113
110
107
103
99
94
87
79
70
58
42
107
106
105
103
101
98
95
91
86
80
73
64
53
38
99
98
97
95
93
91
87
84
79
74
67
59
49
36
92
91
90
89
87
84
81
78
73
68
62
55
46
33
86
85
84
83
81
79
76
73
69
64
58
51
43
31
80
80
79
77
76
74
71
70
64
60
55
48
40
29
75
75
74
73
71
69
67
64
61
56
51
45
38
27
71
71
70
69
67
65
63
60
57
53
49
43
36
26
68
67
66
65
64
62
60
57
54
50
46
41
34
24
64
64
63
62
61
59
57
54
51
48
44
39
32
23
80
1,6/0,1
1,6/0,2
1,6/0,3
1,6/0,4
1,6/0,5
1,6/0,6
1,6/0,7
1,6/0,8
1,6/0,9
1,6/1,0
1,6/1,1
1,6/1,2
1,6/1,3
1,6/1,4
1,6/1,5
612
605
593
576
554
528
497
461
420
374
324
269
209
144
95
425
420
412
400
385
367
345
320
292
260
225
187
145
111
80
312
309
302
294
283
269
253
235
214
191
165
137
114
95
68
239
236
232
225
217
206
194
180
164
146
127
113
100
83
60
189
187
183
178
171
163
153
142
130
119
111
101
89
74
53
153
151
148
144
139
132
124
119
113
107
100
91
80
66
48
126
125
122
120
118
116
112
108
103
97
91
82
73
60
43
114
113
112
111
109
106
103
99
94
89
83
76
67
55
40
105
105
104
102
100
98
95
91
87
82
77
70
61
51
37
98
97
96
95
93
91
88
85
81
76
71
65
57
47
34
91
91
90
89
87
85
82
79
76
71
66
60
53
44
32
86
85
84
83
81
79
77
74
71
67
62
57
50
41
30
81
80
79
78
77
75
73
70
67
63
59
53
52
39
28
76
76
75
74
72
71
69
66
63
59
55
50
44
37
27
72
72
71
70
69
67
65
63
59
56
52
48
42
35
25
69
68
67
66
65
64
62
59
57
54
50
45
40
33
24
85
1,7/0,1
1,7/0,2
1,7/0,3
1,7/0,4
1,7/0,5
1,7/0,6
1,7/0,7
1,7/0,8
1,7/0,9
1,7/1,0
1,7/1,1
1,7/1,2
1,7/1,3
1,7/1,4
1,7/1,5
1,7/1,6
691
684
672
655
634
607
576
540
499
454
403
348
288
223
154
98
480
475
467
455
440
422
400
375
347
315
280
242
200
155
114
82
353
349
343
334
323
310
294
276
255
231
206
178
147
118
98
70
271
267
263
256
248
237
225
211
195
177
158
136
117
103
86
62
213
211
207
202
196
187
178
167
154
140
124
115
104
92
76
55
173
171
168
164
158
152
144
135
125
118
111
103
94
83
69
49
143
141
139
135
131
125
120
117
112
107
101
94
89
75
62
45
121
120
119
118
116
114
111
107
103
98
93
86
78
69
57
41
112
111
110
109
107
105
102
99
95
91
85
79
72
64
53
38
104
103
102
101
99
97
95
92
88
84
79
74
67
59
49
35
97
96
96
94
93
91
89
86
82
79
74
69
63
55
46
33
91
90
90
89
87
85
83
80
77
74
69
65
59
52
43
31
86
85
84
83
82
80
78
76
73
69
65
61
55
49
40
29
81
80
80
79
77
76
74
71
69
65
62
57
52
46
38
27
77
76
75
74
73
72
70
68
65
62
58
54
49
44
36
26
73
72
72
71
70
68
66
64
62
59
56
52
47
41
34
25
90
1,8/0,1
1,8/0,2
1,8/0,3
1,8/0,4
1,8/0,5
1,8/0,6
1,8/0,7
1,8/0,8
1,8/0,9
1,8/1,0
1,8/1,1
1,8/1,2
1,8/1,3
1,8/1,4
1,8/1,5
1,8/1,6
1,8/1,7
775
768
756
739
718
691
660
624
583
538
487
432
372
307
238
163
101
538
533
525
513
498
480
458
433
405
373
338
300
258
213
165
118
85
396
392
386
377
366
353
337
318
298
274
249
220
190
157
121
101
72
303
300
295
289
280
270
258
244
228
210
190
169
145
120
107
88
63
239
237
233
228
221
213
204
193
180
166
150
133
119
108
95
79
56
194
192
189
185
179
173
165
156
146
134
122
115
107
97
85
71
51
160
159
156
153
148
143
136
129
120
117
111
105
97
88
78
64
46
135
133
131
128
125
120
118
115
111
107
102
96
89
81
71
59
42
118
118
117
116
114
112
109
106
103
99
94
88
82
75
66
54
39
110
110
109
107
106
104
102
99
95
92
87
82
76
69
61
50
36
103
102
101
100
99
97
95
92
89
86
81
77
71
65
57
47
34
96
96
95
94
93
91
89
86
84
80
76
72
67
61
53
44
32
91
90
89
88
87
86
84
81
79
75
72
68
63
59
50
42
30
86
85
85
84
82
81
79
77
74
71
68
64
59
54
47
39
28
81
81
80
79
78
77
75
73
70
68
64
61
56
51
45
37
27
77
77
76
75
74
73
71
69
67
64
61
57
53
48
43
35
25
95
1,9/0,1
1,9/0,2
1,9/0,3
1,9/0,4
1,9/0,5
1,9/0,6
1,9/0,7
1,9/0,8
1,9/0,9
1,9/1,0
1,9/1,1
1,9/1,2
1,9/1,3
1,9/1,4
1,9/1,5
1,9/1,6
1,9/1,7
1,9/1,8
864
857
845
828
806
780
749
713
672
626
576
521
461
396
324
252
173
104
600
595
587
575
560
542
520
495
467
435
400
362
320
275
227
175
120
87
441
437
431
422
411
398
382
364
343
320
294
266
235
202
167
129
104
74
338
335
330
323
315
305
293
278
263
245
225
202
180
155
128
110
91
65
267
264
261
256
249
241
231
220
207
193
178
161
142
122
111
98
81
58
216
214
211
207
202
195
187
178
168
157
144
130
119
110
100
88
73
52
179
177
175
171
167
161
155
147
139
129
117
115
108
100
91
80
66
47
150
149
147
144
140
135
130
124
120
115
111
105
99
92
83
73
61
43
128
127
125
122
120
119
116
114
110
107
102
97
91
85
77
68
56
40
116
116
115
114
112
110
108
106
102
99
95
90
85
79
71
63
52
37
108
108
107
106
105
103
101
98
96
92
89
84
79
73
67
59
48
35
102
101
101
100
98
97
95
92
90
87
83
80
74
69
62
55
45
32
96
95
95
94
92
91
89
87
84
81
78
74
70
65
61
52
43
31
90
90
89
88
87
86
84
82
80
77
74
70
66
61
56
49
40
29
86
85
85
84
83
81
80
78
75
73
70
66
63
58
53
46
38
27
81
81
80
80
79
77
76
74
72
69
66
63
59
55
50
44
36
26
100
2,0/0,1
2,0/0,2
2,0/0,3
2,0/0,4
2,0/0,5
2,0/0,6
2,0/0,7
2,0/0,8
2,0/0,9
2,0/1,0
2,0/1,1
2,0/1,2
2,0/1,3
2,0/1,4
2,0/1,5
2,0/1,6
2,0/1,7
2,0/1,8
2,0/1,9
958
950
938
922
900
874
842
806
766
720
670
614
554
490
420
346
266
182
107
665
660
652
640
625
607
585
560
532
500
465
427
385
340
292
240
185
127
89
489
485
479
473
459
446
430
411
391
367
342
313
283
250
214
176
136
107
76
374
371
367
360
352
341
329
315
299
281
262
240
217
191
164
135
113
93
67
296
293
290
284
278
270
260
249
236
222
207
190
171
151
130
114
100
83
59
239
238
235
230
225
218
211
202
191
180
167
154
139
122
113
103
90
75
54
198
196
194
190
186
180
174
167
158
149
138
127
118
111
103
94
82
68
49
166
165
163
160
156
152
146
140
133
125
119
114
109
102
94
86
75
62
45
142
141
139
136
133
129
125
119
118
114
110
105
100
94
87
79
69
57
41
122
121
120
120
119
117
115
112
109
106
102
98
93
87
81
73
65
53
38
114
114
113
112
111
109
107
105
102
99
95
91
87
82
76
69
60
50
36
107
107
106
105
104
102
100
98
96
93
89
86
81
77
71
64
56
47
33
101
100
100
99
98
96
94
92
90
87
84
81
77
72
67
61
53
44
31
95
95
94
93
92
91
89
87
85
82
81
76
72
68
63
57
50
42
30
90
90
89
88
87
86
85
84
81
78
75
72
69
64
60
54
48
39
28
86
85
85
84
83
82
80
79
77
74
72
69
65
61
57
51
45
37
27
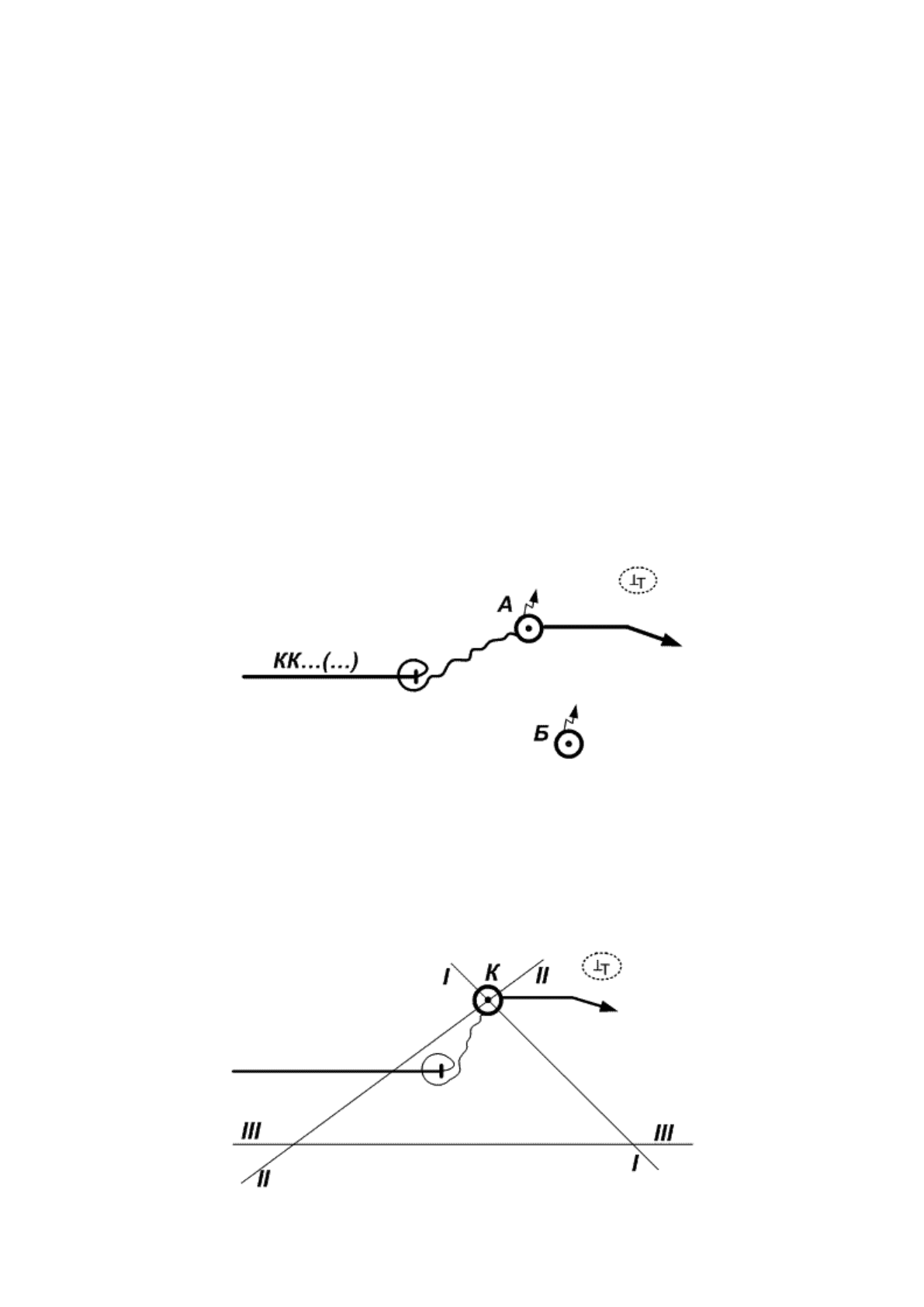
Таблица предназначена для определения промежутка времени (в мин.) плавания по счислению
после последней (принятой к счислению) обсервации в течение которого радиальная (круговая) СКП
текущего места судна еще не превысит допустимое значение радиальной (круговой) СКП места (М
доп
).
Входными аргументами в таблицу являются:
1. Кратчайшее расстояние (D
кр
) до навигационной опасности или берега (от 10 до 100 миль, через
каждые 5 миль).
2. Допустимое (по требованиям ИМО) значение радиальной (круговой) СКП места судна (М
доп
) (от
0,2 мили до 2,0 мили, через каждые 0,1 мили).
3. Значение радиальной (круговой) СКП последнего (принятого к счислению) обсервованного
места судна (М
O
) (от 0,1 мили до 1,9 мили, через каждые 0,1 мили).
4. Значение коэффициента точности счисления (К
C
) (от 0,5 до 2,0, через 0,1).
Например: Если К
C
= 1,5, М
O
= 0,3 мили, D
кр
= 55 миль (М
доп
= 1,1 мили) то Δt
доп
= 60 мин.
24.5. Рекомендации по анализу счисления пути судна
В практике судовождения могут встретиться случаи, когда с достаточной уверенностью нельзя
сделать заключение о достоверности обсервованного или счислимого места судна. В таких случаях, до
получения достоверной информации, используется опыт хорошей морской практики.
Рассмотрим несколько примеров.
1. Одновременно (или почти одновременно) получили две обсервации, места которых на МНК не
совпадают. Какому из этих мест отдать предпочтение, если точность их (М
O1
и М
O2
) одинакова? (рис.
24.19).
Рис. 24.19. Считай себя ближе к опасности
Оценив реальную навигационную обстановку, к дальнейшему счислению следует принимать
обсервацию в точке А, которая ближе всего находится к навигационной опасности. «…Всегда считай
себя ближе к опасности» – это неписанное правило должно соблюдаться всегда, чтобы избежать
навигационного происшествия (посадка на мель, выход на опасные глубины и пр.).
2. При определении места судна по 3-м (и более) линиям положения при прокладке их на карте
получили фигуру погрешности (рис. 24.20).
Рис. 24.20. Считай себя ближе к опасности
Оценив навигационную обстановку, считаем, что обсервованное место находится в точке
пересечения ЛП I – I и ЛП II – II точка К. Ведь именно эта точка лежит ближе всего к навигационной
опасности. Повторив измерения навигационных параметров, или использовав другие способы
определения места, окончательно принимаем решение о достоверности обсервации.
(В данном случае предварительно сделали вывод, что в 3-й ЛП имелся промах или в измерении НП
или в их обработке, или в прокладке на карте).
3. Если при определении места судна (рис. 24.21) обсервованное место находится в пределах
площади круга, с центром в счислимой точке на время обсервации и радиусом R = М
СЧ
, то можно
сделать вывод, что счисление пути судна велось правильно и к счислению принимается обсервованное
место без осреднения со счислимым.
Рис. 24.21. Счислению можно доверить
Если же при определении места судна значение полученной невязки С = М
СЧ
+ М
O
– это говорит о
том, что счисление пути судна ведется некачественно (но могут быть и неточности в обсервованном
месте). В данном случае к дальнейшему счислению следует принимать вероятнейшее место,
получаемое осреднением счислимого и обсервованного мест.
Рис. 24.22. Счислению доверить нельзя
4. Если радиальная (круговая) СКП обсервованного места М
O
в три и более раза выше (точнее)
радиальной (круговой) СКП счислимого места М
СЧ
на момент обсервации, то к дальнейшему счислению
принимают «чисто» координаты обсервованного места и не отыскивают вероятнейшее место
осреднением со счислимым местом (рис. 24.23).
Рис. 24.23. Счисление от обсервации (3М
O
≥ М
СЧ
)
Если же значения М
O
и М
СЧ
соизмеримы по величине (3М
O
< М
СЧ
), то к дальнейшему счислению
принимают вероятнейшее место, отыскиваемое осреднением обсервованного (точка О) и счислимого
(точка С) мест (рис. 24.24).
Из примера на рис. 24.24 очевидно, что вероятнейшее место (точка Д) точнее (М
В
= 0,8 мили) и
обсервованного (М
O
= 1,0 мили) и счислимого (М
СЧ
= 1,6 мили) мест.
Рис. 24.24. Счисление от вероятнейшего места (3М
O
< М
СЧ
)
5. Если при определении места величина невязки С превышает утроенную радиальную (круговую)
СКП счислимого места (М
СЧ
), т.е. С > 3 М
СЧ
(P = 99,9%) следует проверить графическое счисление пути
судна от последней, принятой к счислению, обсервации.
При отсутствии ошибок (промахов) в счислении, следует повторить измерения, а если результат
останется таким же – определить место судна другим способом.
Если и в этом случае результат останется прежним – обсервацию принять во внимание, но к
дальнейшему счислению не принимать до получения уверенной надежной обсервации.
Выводы
1. Отыскание вероятнейшего места судна среди разнородных обсерваций, приведенных к одному
моменту, и счислимого места производится последовательным попарным применением
центрографического приема.
2. Центрографический прием – деление отрезка, соединяющего два места (приведенных к одному
моменту) на части, обратно пропорциональные весам этих мест или прямо пропорционально
квадратам их СКП.
3. Радиальная (круговая) СКП вероятнейшего места судна будет всегда меньше наименьшей
радиальной (круговой) СКП принятых к осреднению мест, т.е. вероятнейшее место более точное,
чем каждое место по отдельности.
4. Для получения более точного и надежного обсервованного места судна, необходимо иметь не
две, а три и более линий положения, что дает, при условии их пересечения в одной (почти в
одной) точке, полновесную обсервацию с более высокой точностью, чем при наличии всего двух
линий положения.
5. Если при прокладке на карте линии положения образуют фигуру погрешности, то вероятное
обсервованное место судна находится методом биссектрис или центрографическим методом.
6. Частота определений места судна в море должна быть такой, чтобы погрешность текущего места
судна не превышала допустимую предельную погрешность с заданной вероятностью.