Мирошник И.В. Теория автоматического управления. Линейные системы
Подождите немного. Документ загружается.

Глава
1
о.
Практикум
Целью
практикума
является
освоение
временных
методов
исследования
линейных
систем
автоматического
управления.
В
процессе
выполнения
работы
предусмат
ривается
проведение
анализа
динамических
систем
непрерывного
и
дискретного
времени,
синтеза
основных
элементов
САУ
-
регуляторов,
задающих
блоков
и
наблюдателей;
изучение
особенностей
цифровых
систем,
а
также
моделирование
динамических
процессов
и
анализ
полученных
результатов.
10.1.
Синтез
линейной
системы
управления
в
этой
части
практикума
осуществляется
разработка
линейной
системы
управ
ления
непрерывного
времени
по
заданным
вариантам
структурной
схемы
объек
та
управления,
задающего
и
возмущающего
воздействий,
наблюдателя
состояния,
а
также
числовым
значениям
параметров
и
качественных
показателей
синтезиру
емой
системы
(см.,
например,
[29]).
В
ходе
работы
предусматривается
выполнение
следующих
этапов.
1.
Анализ
объекта
управления:
построение
математической
модели
объекта
в
форме
вход-состояние-выход,
нахождение
характеристического
полинома
и
его
корней,
анализ
устойчивости
объекта;
исследование
структурных
свойств
(управляемости
и
наблюдаемости);
проведение
моделирования
и
построение
переходных
функций.
2.
Синтез
алгоритма
стабилизации:
расчет
пропорционального
регулятора
и
обратных
связей
по
заданным
динамическим
показателям
качества;
проведе
ние
моделирования
и
оценка
качества
синтезированной
системы
по
получен
ным
временным
диаграммам.
3.
Исследование
возмущенной
системы:
построение
модели
внешней
среды
и
определение
ошибки
системы
с
пропорциональным
регулятором;
построение
и
настройка
астатического
регулятора;
синтез
комбинированного
регулятора
(расчет
прямых
связей
по
возмущению);
моделирование,
оценка
качества
по
полученным
временным
диаграммам
и
выбор
типа
регулятора.
10.1.
Синтез
линейной
системы
управления
311
4.
Исследование
следящей
системы:
построение
задающего
блока
и
(при
необ
ходимости)
расширенной
модели
объекта
управления;
определение
ошибки
слежения
системы
с
пропорциональным
регулятором; синтез
комбинирован
ного
регулятора
и
расчет
прямых
связей
по
заданию;
моделирование
и
оценка
качества
по
полученным
временным
диаграммам.
5.
Синтез
наблюдателя:
построение
наблюдателя
состояния
объекта
управле
ния
и
(при
необходимости)
внешней
среды;
моделирование
и
оценка
качества
процессов
наблюдения
по
полученным
временным
диаграммам.
6.
Исследование
синтезированной
системы
управления:
построение
полного
алгоритма
управления;
моделирование
системы;
оценка
ее
качественных
по
казателей
и
сравнение
с
заданием.
10.1.1.
Анализ
объекта
управления
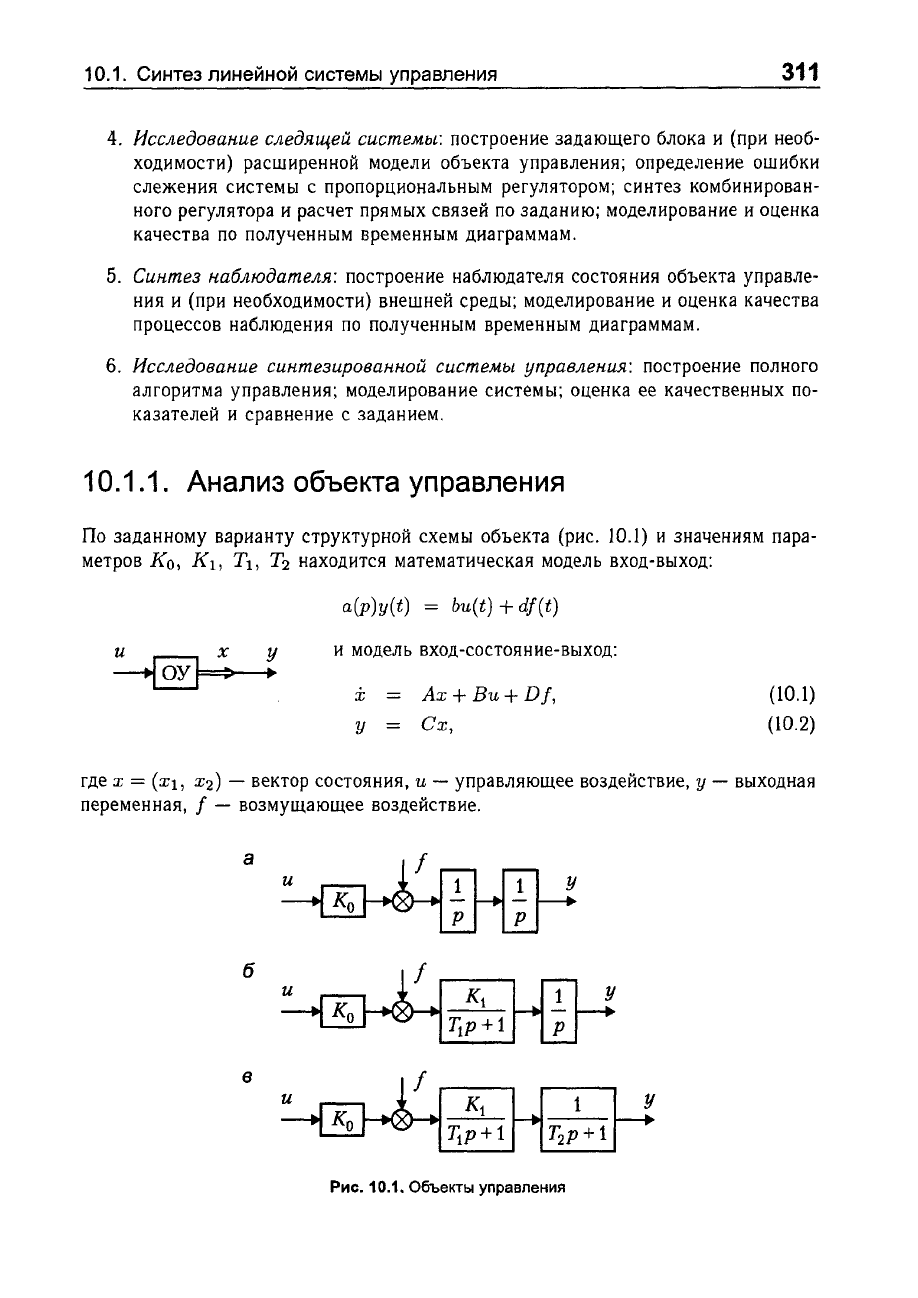
По
заданному
варианту
структурной
схемы
объекта
(рис.
10.1)
и
значениям
пара
метров КО)
K
1
,
Т
1
,
Т
2
находится
математическая
модель
вход-выход:
~
~
a(p)y(t) = bu(t) + dJ(t)
и
модель
вход-состояние-выход:
±
Ax+Bu+DJ,
у
Сх,
(10.1)
(10.2)
где
х
=
(хl,
Х2)
-
вектор
состояния,
и
-
управляющее
воздействие,
у
-
выходная
переменная,
J -
возмущающее
воздействие.
а
б
в
Рис.
10.1.
Объекты
управления
312
Глава
10.
Практикум
Характеристический
полином
объекта
определяется
выражением
а(р)
= det(pI -
А)
=
р2
+
аlР
+
а2,
а
его
корни
Рl,2
находятся
в
результате
решения
характеристического
уравнения
а(р)
=
О.
ДЛЯ
анализа
свойств
управляемости
и
наблюдаемости
модели
(10.1)-
(10.2)
находятся
матрицы
управляемости
и
и
наблюдаемости
Q
(см.
п.
5.3).
По
окончании
расчетов
проводится
моделирование
ОУ
при
и
= 1
и
f =
О
и
нахо
дятся
переходные
функции
у
=
хl
(t)
И
X2(t).
10.1.2.
Синтез
алгоритма
стабилизации
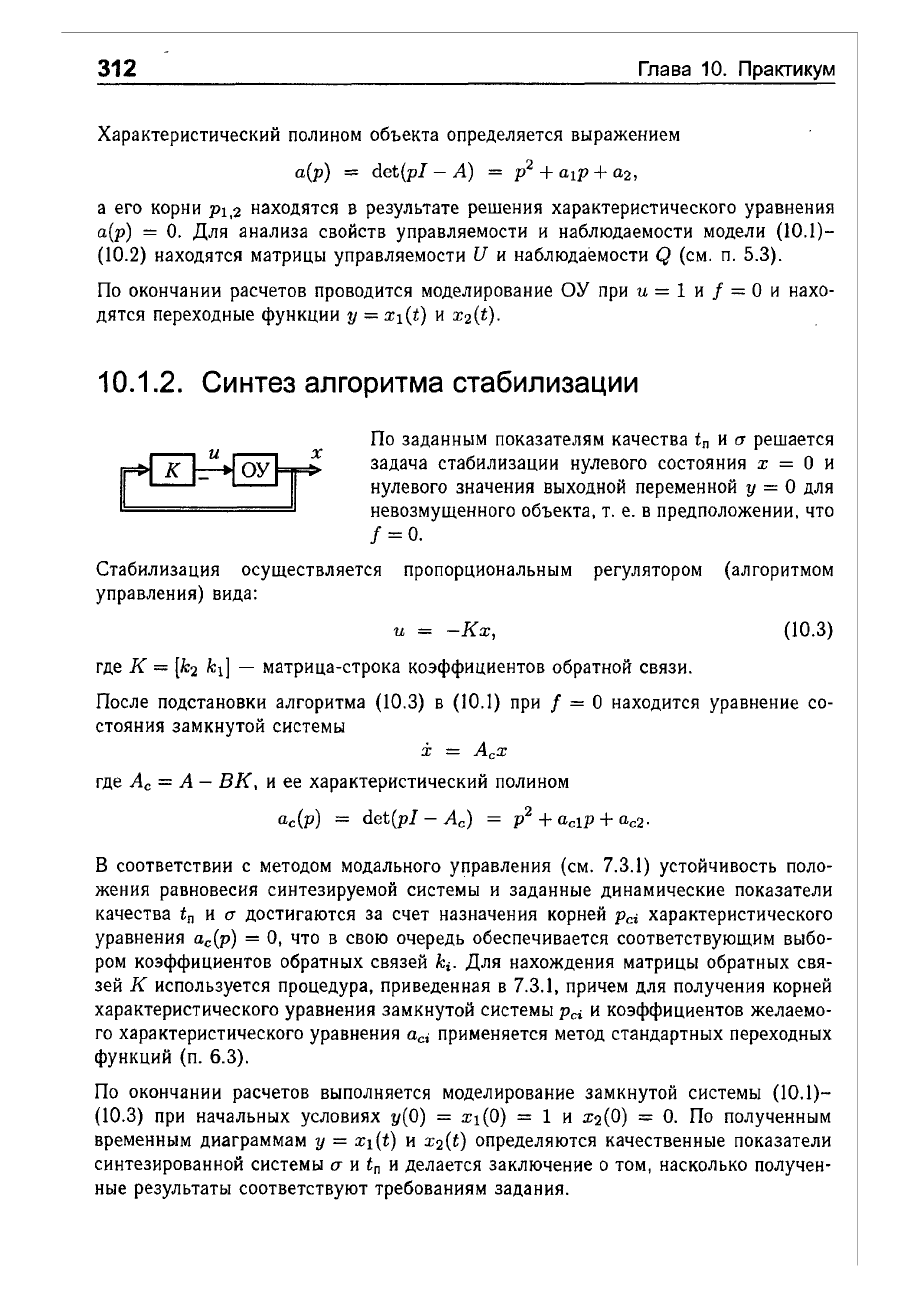
По
заданным
показателям
качества
t
n
и
(J
решается
задача
стабилизации
нулевого
состояния
х
=
О и
нулевого
значения
выходной
переменной
у
=
О
для
невозмущенного
объекта,
т.
е.
в
предположении,
что
1=0.
Стабилизация
осуществляется
пропорциональным
регулятором (алгоритмом
управления)
вида:
u =
-Кх,
(10.3)
где
К
=
[k
2
k
1
] -
матрица-строка
коэффициентов
обратной
связи.
После
подстановки
алгоритма
(10.3)
в
(10.1)
при
f =
о
находится
уравнение
со
стояния
замкнутой
системы
± =
Асх
где
Ас
=
А
-
ВК,
и
ее
характеристический
полином
ас(р)
= det(pI -
Ас)
=
р2
+ aclp +
а
с
2'
в
соответствии
с
методом
модального
управления
(см.
7.3.1)
устойчивость
поло
жения
равновесия
синтезируемой
системы
и
заданные
динамические
показатели
качества
t
n
и
(J
достигаются
за
счет
назначения
корней
Pci
характеристического
уравнения
ас(р)
=
О,
что
в
свою
очередь
обеспечивается
соответствующим
выбо
ром
коэффициентов
обратных
связей
k
i
.
Для
нахождения
матрицы
обратных
свя
зей
К
используется
процедура,
приведенная
в
7.3.1,
причем
для
получения
корней
характеристического
уравнения
замкнутой
системы
Pci
и
коэффициентов
желаемо
го
характеристического
уравнения
aci
применяется
метод
стандартных переходных
функций
(п.
6.3).
По
окончании
расчетов
выполняется
моделирование
замкнутой
системы
(10.1)-
(10.3)
при
начальных
условиях
у(О)
=
Xl
(О)
= 1
и
Х2(0)
=
О.
По
полученным
временным
диаграммам
у
=
Xl
(t)
и
X2(t)
определяются
качественные
показатели
синтезированной
системы
(J
и
t
n
и
делается
заключение
о
том,
насколько
получен
ные
результаты
соответствуют
требованиям
задания.
10.1.
Синтез
линейной
системы
управления
313
10.1.3.
Исследование
возмущенной
системы
Решается
задача
стабилизации
объекта,
подверженного
влиянию
возмущающего
воздействия
f(t)
=1-
о
заданного
типа:
а)
J =
-р
l(t)
-
постоянное
воздействие;
6)
J = - V
j
t -
линейно
нарастающее
воздействие;
в)
J = -р
sinwjt
-
гармоническое
воздействие;
г)
J =
-р
sign(sinwjt)
-
импульсное.
воздействие,
с
заданными
значениями
параметров
р,
Vj,
Wj.
Рассчитывается
точность
системы
с
полученным
ранее
пропорциональным
регу
лятором,
рассматривается
астатический
регулятор,
обеспечивающий
уменьшение
установившейся
ошибки,
и
комбинированный
регулятор,
гарантирующий
получе
ние
абсолютной
точности
возмущенной
системы.
Необходимым
этапом
исследова
ния
является
построение
модели
внешней
среды
(ВС),
т.
е.
динамической
системы,
выходом
которой
является
возмущающее
воздействие
J(t).
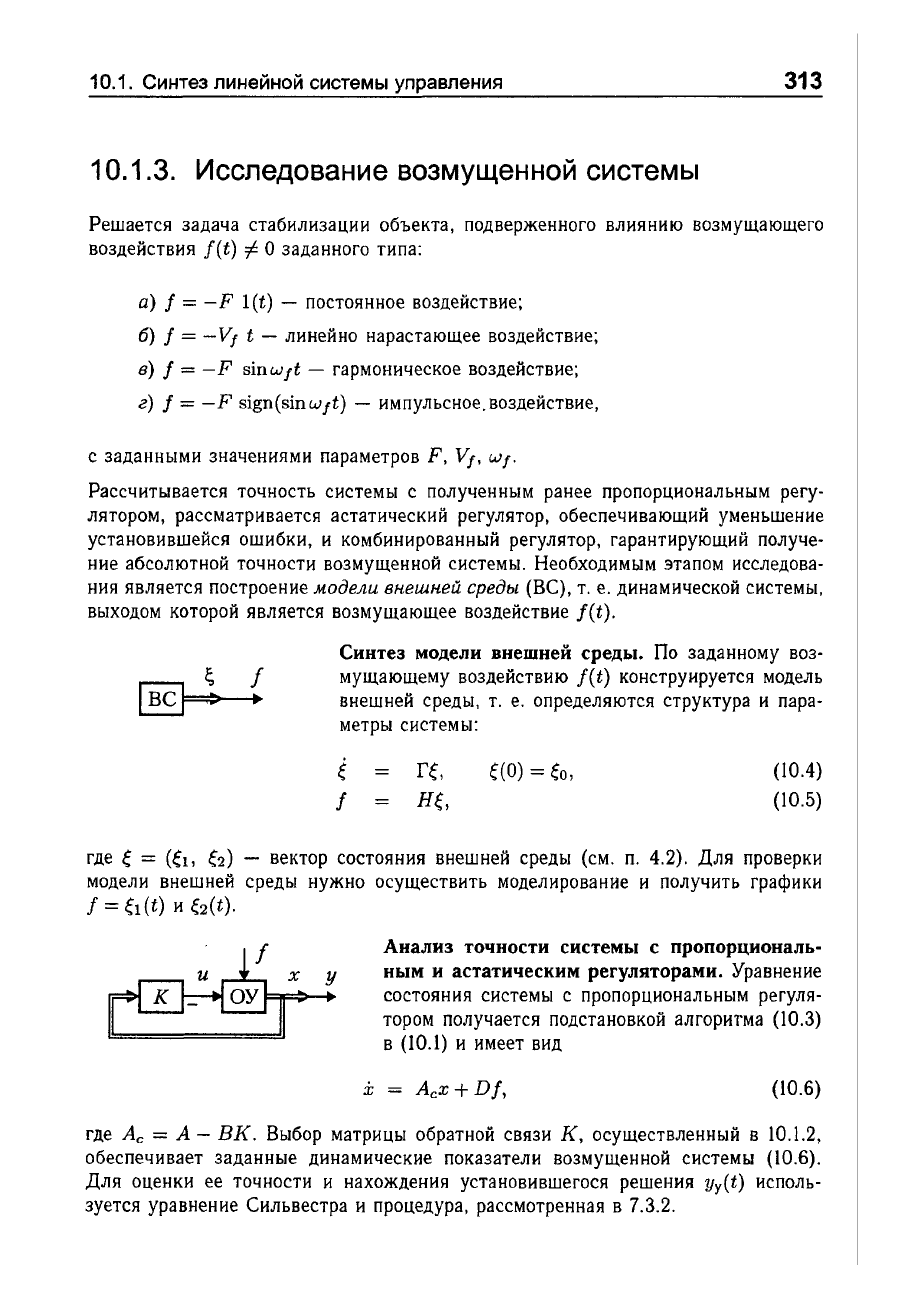
Синтез модели
внешней
среды.
По
заданному
воз
мущающему
воздействию
f(t)
конструируется
модель
внешней
среды,
т.
е.
определяются
структура
и
пара-
метры
системы:
€(O)
=
€o,
(10.4)
(10.5)
где
€ = (6,
€2)
-
вектор
состояния
внешней
среды
(см.
п.
4.2).
Для
проверки
модели
внешней
среды
нужно
осуществить
моделирование
и
получить
графики
f = 6 (t)
и
c;2(t).
Анализ
точности
системы
с
пропорциональ
ным
и
астатическим
регуляторами.
Уравнение
состояния
системы
с
пропорциональным
регуля
тором
получается
подстановкой
алгоритма
(10.3)
в
(10.1)
и
имеет
вид
± =
Acx+DJ,
(10.6)
где
Ас
=
А
-
ВК.
Выбор
матрицы
обратной
связи
К,
осуществленный
в
10.1.2,
обеспечивает
заданные
динамические
показатели
возмущенной
системы
(10.6).
Для
оценки
ее
точности
и
нахождения
установившегося
решения
Yy(t)
исполь
зуется
уравнение
Сильвестра
и
процедура,
рассмотренная
в
7.3.2.
314
Глава
10.
Практикум
По
установившемуся
решению
Yy(t)
определяется
абсолютная
погрешность
д!
=
тах
IYy(t)l,
tE[O,tp]
где
t
p
-
заданное
время
работы
системы,
и
относительная
погрешность:
д!
=
~!
Ушах
(10.7)
Замечание
10.1.
Число
У:Пах
определяется
как
наибольшее
абсолютное
значение
задающего
воздействия
y*(t)
за
время
t
p
(см.
10.1.4),
т.
е.
Y~1aX
=
тах
ly*(t)l·
tE
[O,t
p
]
Jtля
подтвер)Кдения
правильности
расчетов
необходимо осуществить
моделирова
ние
возмущенной
системы,
получить
графики
y(t),
f(t),
найти
экспериментальные
значения
абсолютной
д!
и
относительной
д!
погрешностеЙ.
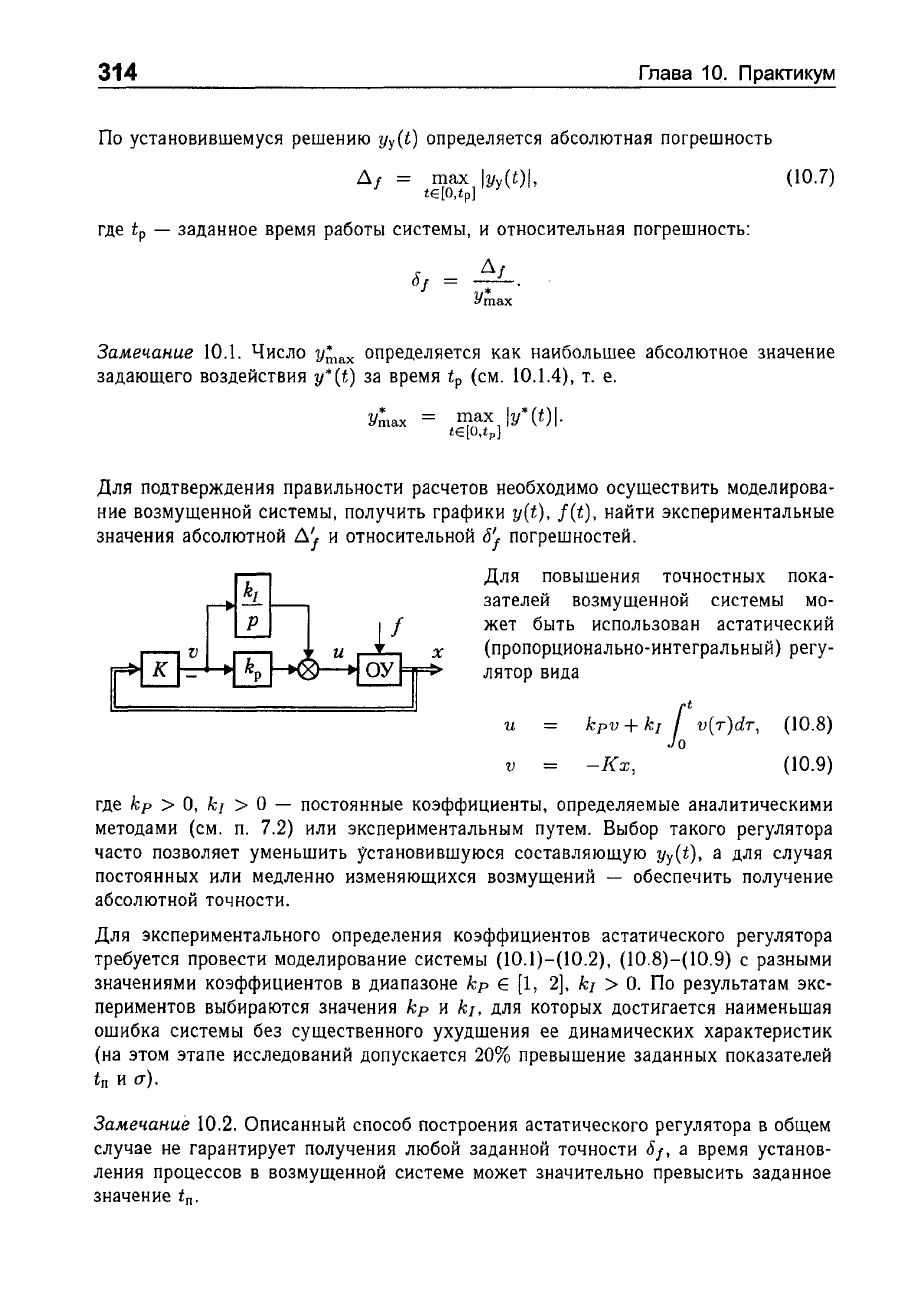
Для
повышения
точностных
пока
зателей
возмущенной
системы
мо
)Кет
быть
использован
астатический
(пропорционально-интегральный)
регу
лятор
вида
и
kpv
+ k[
l'
v(r)dr,
(10.8)
v =
-Кх,
(10.9)
где
kp >
о,
k[
>
О
-
постоянные
коэффициенты,
определяемые
аналитическими
методами
(см.
п.
7.2)
или
экспериментальным
путем.
Выбор
такого
регулятора
часто
позволяет
уменьшить
J'становившуюся
составляющую
yy(t),
а
для
случая
постоянных
или
медленно
изменяющихся
возмущений
-
обеспечить
получение
абсолютной
точности.
Jtля
экспериментального
определения
коэффициентов
астатического
регулятора
требуется
провести
моделирование
системы
(10.1)-(10.2), (10.8)-(10.9)
с
разными
значениями
коэффициентов
в
диапазоне
k
p
Е
[1,
2],
k[
>
о.
По
результатам
экс
периментов
выбираются
значения
k
p
и
k[,
для
которых
достигается
наименьшая
ошибка
системы
без
существенного
ухудшения
ее
динамических
характеристик
(на
этом
этапе
исследований
допускается
20%
превышение
заданных
показателей
t
n
и
0").
Замечание
10.2.
Описанный
способ
построения
астатического
регулятора
в
общем
случае
не
гарантирует
получения
любой
заданной
точности
д
f,
а
время
установ
ления
процессов
в
возмущенной
системе
может
значительно
превысить
заданное
значение
t
n
•
10.1.
Синтез
линейной
системы
управления
315
в
работе
необходимо
привести
найденные
значения
коэффициентов
регулятора
kp,
k]
и
результаты
моделирования
(графики
y(t)
и
f(t))
автономной
и
возмущенной
системы
с
астатическим
регулятором.
По
временным
диаграммам
автономной
си
стемы
(f(t)
==
О,
у(О)
=
хl
(О)
=
1,
Х2(0)
=
О
определяются
динамические
показате
ли
качества
t~,
0"',
а
по
графикам
для
возмущенной
системы
(при
у(О)
=
Х2(0)
=
О)
находится
абсолютная
погрешность
д!
и
рассчитывается
относительная
погреш
ность
,
д!
д
!
=
-*-
Утах
f
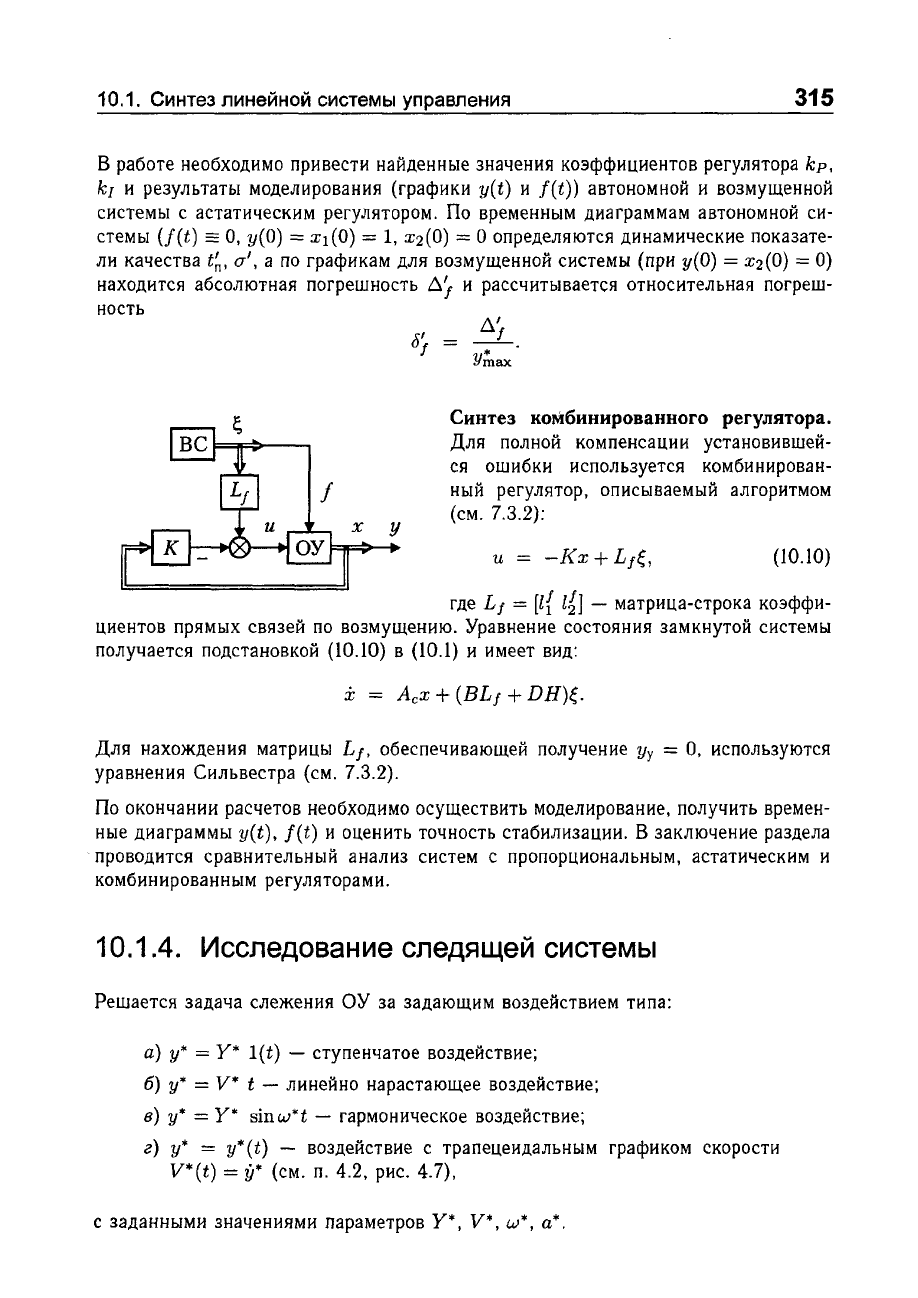
х
у
Синтез
комбинированного
регулятора.
Для
полной
компенсации
установившей
ся
ошибки
используется
комбинирован
ный
регулятор,
описываемый
алгоритмом
(см.
7.3.2):
(10.10)
где
L f =
[l{
ltJ
-
матрица-строка
коэффи
циентов
прямых
связей
по
возмущению.
Уравнение
состояния
замкнутой системы
получается
подстановкой
(10.10)
в
(10.1)
и
имеет
вид:
± =
Асх
+
(BLf
+
DH)~.
Для
нахождения
матрицы
L
f,
обеспечивающей
получение
Уу
=
О,
используются
уравнения
Сильвестра
(см.
7.3.2).
По
окончании
расчетов
необходимо
осуществить
моделирование,
получить
времен
ные
диаграммы
y(t),
f(t)
и
оценить
точность
стабилизации.
В
заключение
раздела
'проводится
сравнительный
анализ
систем
с
пропорциональным,
астатическим
и
комбинированным
регуляторами.
10.1.4.
Исследование
следящей
системы
Решается
задача
слежения
ОУ
за
задающим
воздействием
типа:
а)
у*
=
у*
l(t)
-
ступенчатое
воздействие;
6)
у*
=
V*
t -
линейно
нарастающее
воздействие;
в)
у*
=
У*
sinw*t -
гармоническое
воздействие;
г)
у*
=
y*(t)
-
воздействие
с
трапецеидальным
графиком
скорости
V*(t)
=
у*
(см.
п.
4.2,
рис.
4.7),
с
заданными
значениями
параметров
У*,
V*,
w*,
а*.
316
Глава
1
О.
Практикум
Задача
синтеза
следящей
системы
решается
без
учета
влияния
внешней
среды.
т. е.
в
предположении,
что
J(t) =
О.
При
этом
уравнение
объекта
управления
(10.1)
можно
переписать
в
виде
± =
Ах+Вu.
(10.11)
в
системах
с
астатическим
регулятором
(10.8)-(10.9),
обеспечивающим
уменьше
ние
погрешности
системы
в
условиях
действия
возмущения
J,
требуется
учесть
динамику
регулятора,
что
вызывает
необходимость
использования
при
расчетах
следящей
системы
расширенной
модели
объекта
(см.
ниже).
На
данном
этапе
ис
следований
требуется
также
построить
задающий
блок
(ЗБ),
т.
е.
встроенную
динамическую
систему,
выходом
которой
является
задающее
воздействие
у*
(t).
х*
у*
~
Синтез
задающего
блока.
По
заданному
задающему
воз
действию
y*(t)
необходимо
синтезировать
задающий
блок
(см.
п.
4.2),
т.
е.
определить
структуру
и
пара
метры
авто
номной
динамической
модели
вида:
:1;*
=
А*х*,
х*(О)
=
Ха,
у*
=
С*х*,
(10.12)
(10.13)
где
х*
=
(xi,
Х2)
-
вектор
состояния
задающего
блока,
или
более
сложной
модели
для
воспроизведения
негладких
задающих
воздействий
(см.
пример
4.3).
Для
проверки
задающего
блока
нужно
осуществить
моделирование
и
получить
графики
y*(t)
и,
при
необходимости,
V*(t).
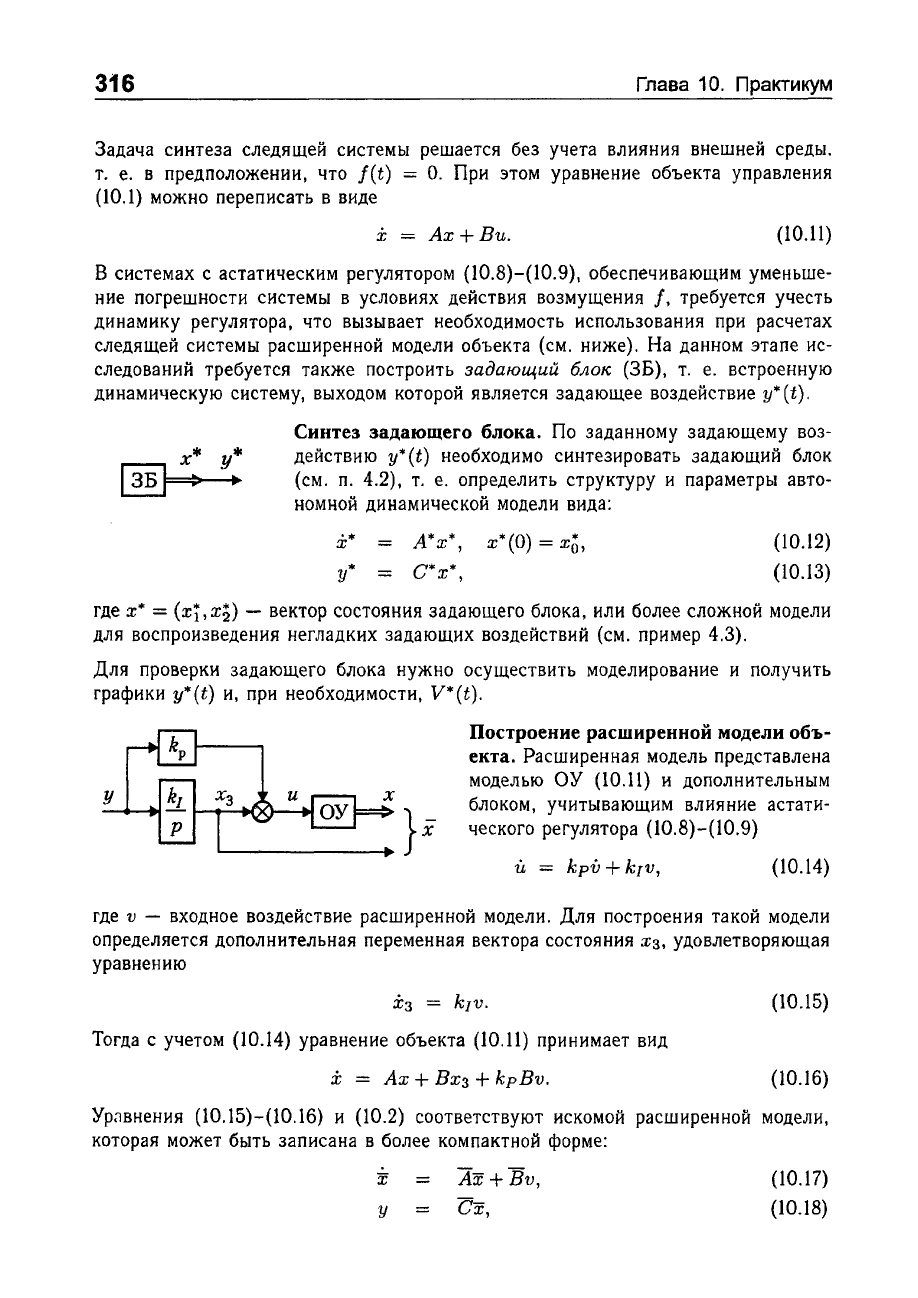
у
Построение
расширенной
модели
объ
екта.
Расширенная
модель
представлена
моделью
ОУ
(10.11)
и
дополнительным
блоком,
учитывающим
влияние
астати
ческого
регулятора
(10.8)-(10.9)
(10.14)
где
v -
входное
воздействие
расширенной
модели.
Для
построения
такой
модели
определяется
дополнительная
переменная
вектора
состояния
Хз.
удовлетворяющая
уравнению
Тогда
с
учетом
(10.14)
уравнение
объекта
(10.11)
принимает
вид
± =
Ах
+
ВХЗ
+
kpBv.
(10.15)
(10.16)
УР;Jвнения
(10.15)-(10.16)
и
(10.2)
соответствуют
искомой
расширенной
модели,
которая
может
быть
записана
в
более
компактной
форме:
х
=
Ax+Bv,
у
=
Сх,
(10.17)
(10.18)
10.1.
Синтез
линейной
системы
управления
317
где
х
=
(Хl,
Х2,
хз)
-
вектор
состояния
расширенной
модели,
А
= I
~
~
1,
в
= I k;/B
1,
с
= 1
с
о
1·
Полученная
модель
используется
в
последующих
расчетах
следящей
системы.
Замечание
10.3.
Далее
используются
обозначения,
соответствующие
исходной
мо
дели
ОУ
(10.11), (10.2)
(без
учета астатического
регулятора).
При
работе
с
расши
ренной
моделью
(10.17)-(10.18)
переменные
х,
и
и
матрицы
А,
В,
С
заменяются
на
переменные
х,
v
И
матрицы
А,
В,
С
соответственно
(см.
также
замечание
10.4).
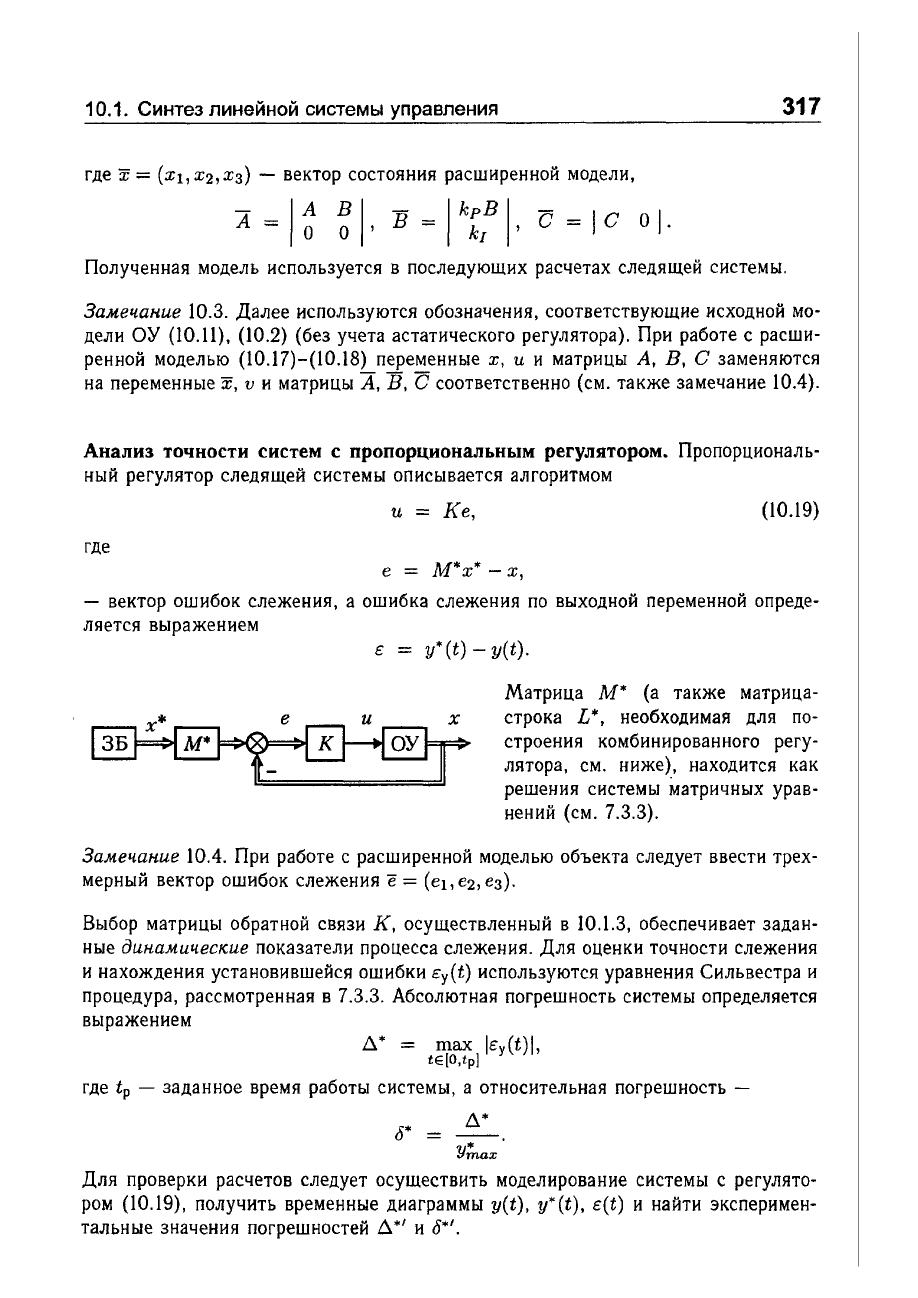
Анализ
точности
систем
с
пропорциональным
регулятором.
Пропорциональ
ный
регулятор
следящей
системы
описывается
алгоритмом
и
=
Ке,
(10.19)
где
е
=
М*х*
-х,
-
вектор
ошибок
слежения,
а
ошибка
слежения
по
выходной
переменной
опреде
ляется
выражением
€ =
у*
(t) - y(t).
'х*
е
u
х
~
Матрица
М*
(а
также
матрица
строка
L * ,
необходимая
для
по
строения
комбинированного
регу
лятора,
см.
ниже)
..
находится
как
решения
системы
матричных
урав
нений
(см.
7.3.3).
Замечание
10.4.
При
работе
с
расширенной
моделью
объекта
следует
ввести
трех
мерный
вектор
ошибок
слежения
е
=
(еl,
е2,
ез).
Выбор
матрицы
обратной
связи
К,
осуществленный
в
10.1.3,
обеспечивает
задан
ные
динамические
показатели
процесса
слежения.
Для
оценки
точности
слежения
и
нахождения
установившейся
ошибки
€y(t)
используются
уравнения
Сильвестра
и
процедура,
рассмотренная
в
7.3.3.
Абсолютная
погрешность
системы
определяется
выражением
д
* =
шах
l€y(t)l,
tE[O,tp]
где
t
p
-
заданное
время
работы
системы,
а
относительная
погрешность
-
6*
=~.
Y:nax
Для
проверки
расчетов следует
осуществить
моделирование
системы
с
регулято
ром
(10.19),
получить
временные
диаграммы
y(t), y*(t), €(t)
и
найти
эксперимен
тальные
значения
погрешностей
Д
*'
и
6*'.
318
х*
е
u
х
ЭВ
лr~
Глава
10.
Практикум
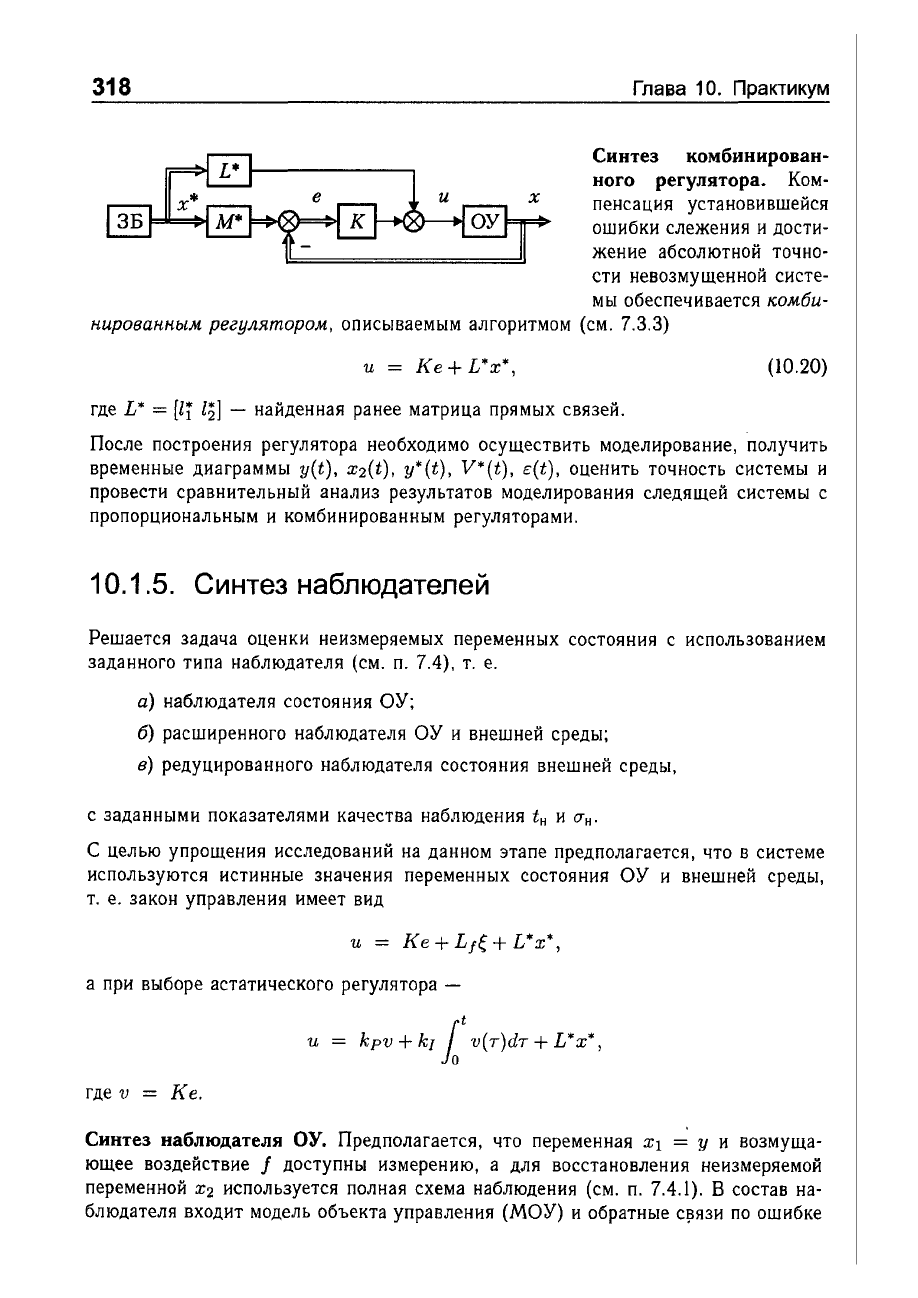
Синтез
комбинирован
ного
регулятора.
Ком
пенсация
установившейся
ошибки
слежения
и
дости
жение
абсолютной
точно
сти
невозмущенной
систе-
мы
обеспечивается
комби
нированным
регулятором,
описываемым
алгоритмом
(см.
7.3.3)
и
=
Ке
+ L*x*, (10.20)
где
L*
=
[li
l2]
-
найденная
ранее
матрица
прямых
связей.
После
построения
регулятора
необходимо
осуществить
моделирование,
получить
временные
диаграммы
y(t), X2(t), y*(t),
V*(t),
e(t),
оценить
точность
системы
и
провести
сравнительный
анализ
результатов
моделирования
следящей
системы
с
пропорциональным
и
комбинированным
регуляторами.
10.1.5.
Синтез
наблюдателей
Решается
задача
оценки
неизмеряемых
переменных
состояния
с
использованием
заданного
типа
наблюдателя
(см.
п.
7.4),
т.
е.
а)
наблюдателя
состояния
ОУ;
б)
расширенного
наблюдателя
ОУ
и
внешней
среды;
в)
редуцированного
наблюдателя
состояния
внешней
среды,
с
заданными
показателями
качества
наблюдения
t
H
и
О"Н,
С
целью
упрощения
исследований
на
данном
этапе
предполагается,
что
в
системе
используются
истинные
значения
переменных
состояния
ОУ
и
внешней
среды,
т.
е.
закон
управления
имеет
вид
и
=
Ke+Lj€+L*x*,
а
при
выборе
астатического
регулятора
-
и
=
kpv
+ k[
l'
v(r)dr
+ L*x*,
где
v =
Ке.
Синтез
наблюдателя
ОУ.
Предполагается,
что
переменная
Хl
=
У
и
возмуща
ющее
воздействие
f
доступны
измерению,
а
для
восстановления
неизмеряемой
переменной
Х2
используется
полная
схема
наблюдения
(см.
п.
7.4.1).
В
состав
на
блюдателя
входит
модель
объекта
управления
(МОУ)
и
обратные
с~язи
по
ошибке
10.1.
Синтез
линейной
системы
управления
319
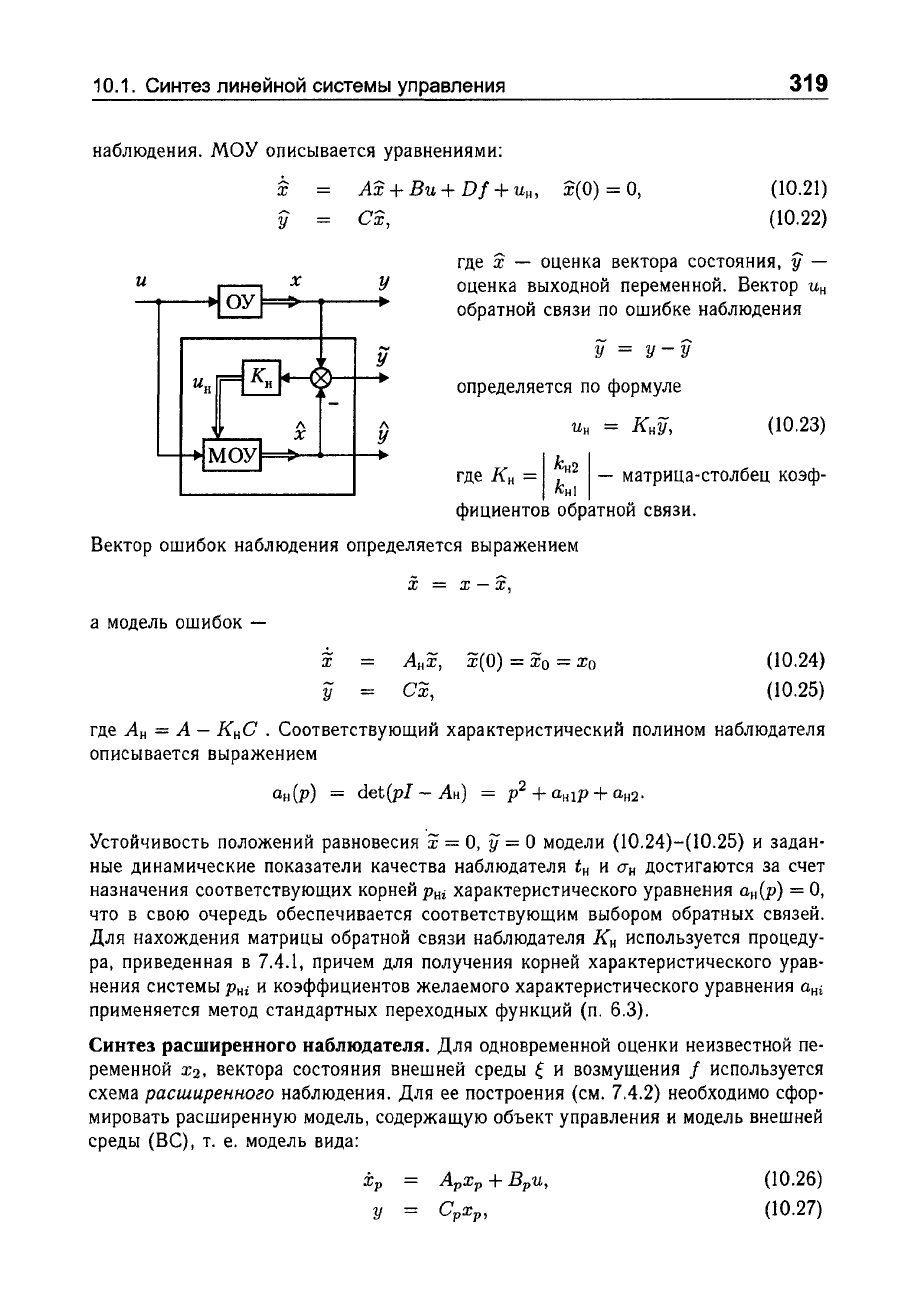
наблюдения.
МОУ
описывается
уравнениями:
u
х
Ах
+
Ви+
Df
+и
н
,
х(О)
=
О,
(10.21)
(10.22)
fj
=
Сх,
х
л
Х
у
л
у
где
Х
-
оценка
вектора
состояния,
fj
-
оценка
выходной
переменной.
Вектор
ин
обратной
связи
по
ошибке
наблюдения
у=у-у
определяется
по
формуле
ин
=
КнУ,
(10.23)
где
К
Н
= 1
~:~
1-
матрица-столбец
коэф
фициентов
обратной
связи.
Вектор
ошибок
наблюдения
определяется
выражением
х
=
Х
-
х,
а
модель
ошибок
-
х
=
Анх,
х(О)
=
ХО
=
хо
у
=
Сх,
(10.24)
(10.25)
где
Ан
=
А
-
КнС
.
Соответствующий
характеристический
полином
наблюдателя
описывается
выражением
ан(р)
= det(pI -
Ан)
=
р2
+
а
н
lР
+
а
н
2.
Устойчивость
положений
равновесия
'х
=
О,
у
=
о
модели
(10.24)-(10.25)
и
задан
ные
динамические
показатели
качества
наблюдателя
t
H
и
О'н
достигаются
за
счет
назначения
соответствующих
корней
PHi
характеристического
уравнения
ан(р)
=
О,
что
в
свою
очередь
обеспечивается
соответствующим
выбором
обратных
связей.
Для
нахождения
матрицы
обратной
связи
наблюдателя
К
Н
используется
процеду
ра,
приведенная
в
7.4.1,
причем
для
получения
корней
характеристического
урав
нения
системы
PHi
и
коэффициентов
желаемого
характеристического
уравнения
aHi
применяется
метод
стандартных
переходных
функций
(п.
6.3).
Синтез
расширенного
наблюдателя.
Для
одновременной
оценки
неизвестной
пе
ременной
Х2,
вектора
состояния
внешней
среды
€
и
возмущения
f
используется
схема
расширенного
наблюдения.
Для
ее
построения
(см.
7.4.2)
необходимо
сфор
мировать
расширенную
модель,
содержащую
объект
управления
и
модель
внешней
среды
(ве),
т.
е.
модель
вида:
Х
р
АрХ
р
+
Ври,
у
=
СрХ
р
,
(10.26)
(10.27)