Neubauer A., Freudenberger J., Kuhn V. Coding theory: algorithms, architectures and applications
Подождите немного. Документ загружается.

166 TURBO CODES
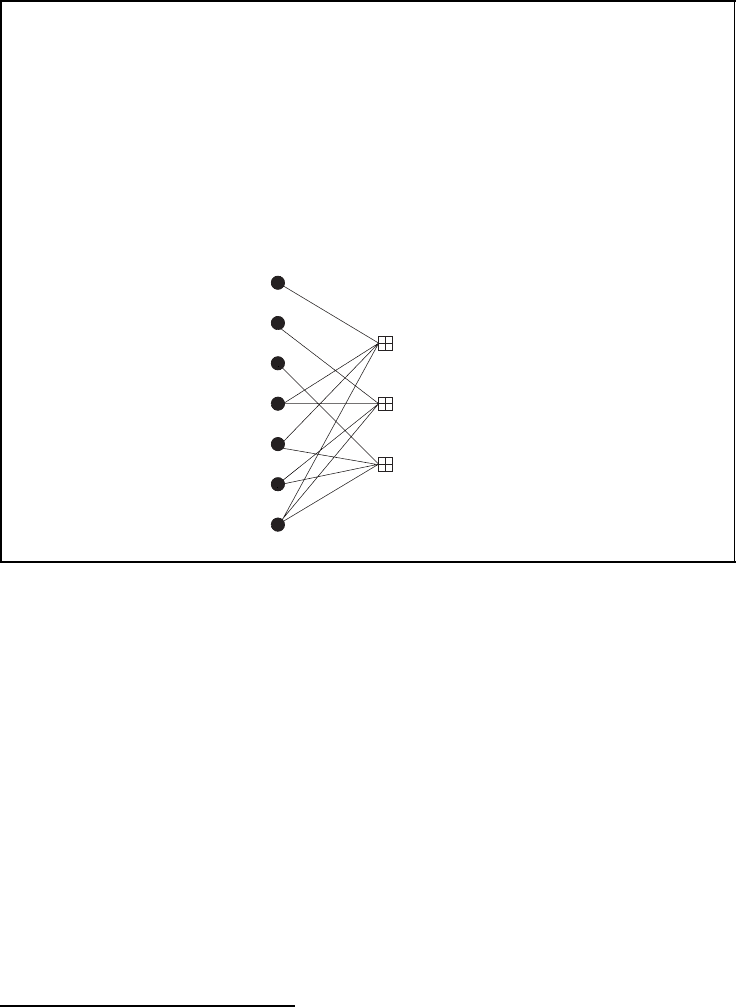
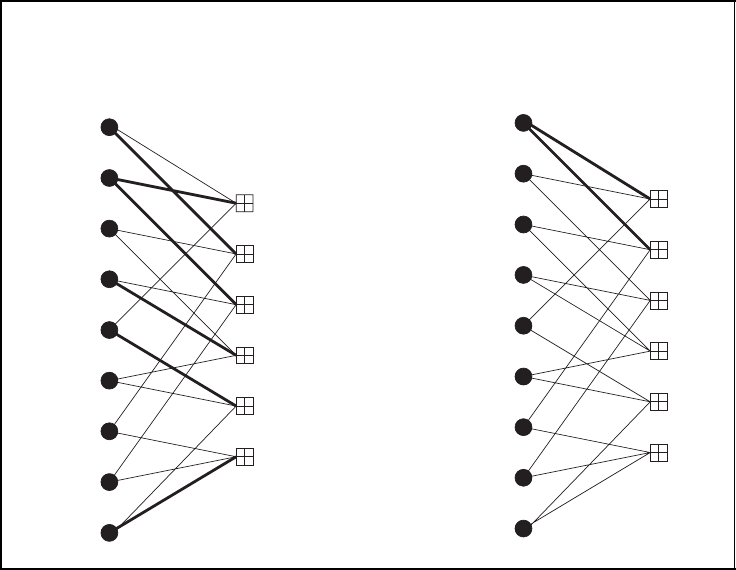
Tanner graph of the Hamming code
■ The parity-check matrix of the Hamming code B(7, 4, 3)
H =
1001101
0101011
0010111
can be considered as adjacency matrix of the following Tanner graph
b
6
b
7
b
5
b
4
b
3
b
2
b
1
c
1
:
b
1
⊕ b
4
⊕ b
5
⊕ b
7
= 0
c
2
:
b
2
⊕ b
4
⊕ b
6
⊕ b
7
= 0
c
3
:
b
3
⊕ b
5
⊕ b
6
⊕ b
7
= 0
Figure 4.2: Tanner graph of the Hamming code
and b
7
. Note that edges only connect two nodes not residing in the same class. A vector
b = (b
1
,...,b
n
) is a code word if and only if all parity-check equations are satisfied, i.e.
for all check nodes the sum of the neighbouring positions among the message nodes is
zero. Hence, the graph defines a linear code of block length n. The dimension is at least
k = n − r. It might be larger than n − r, because some of the check equations could be
linearly dependent.
Actually, the r × n parity-check matrix can be considered as the adjacency matrix of
the Tanner graph.
3
The entry h
ji
of the parity-check matrix H is 1 if and only if the jth
check node is connected to the ith message node. Consequently, the j th row of the parity-
check matrix determines the connections of the check node c
j
, i.e. c
j
is connected to all
message nodes corresponding to 1s in the jth row. We call those nodes the neighbourhood
of c
j
. The neighbourhood of c
j
is represented by the set P
j
={i : h
ji
= 1}. Similarly, the
1s in the ith column of the parity-check determine the connections of the message node
3
In general, the adjacency matrix A for a finite graph with N nodes is an N × N matrix where the entry
a
ij
is the number of edges connecting node i and node j . In the special case of a bipartite Tanner graph, there
exist no edges between check nodes and message nodes. Therefore, we do not require a square (n + r) × (n + r)
adjacency matrix. The parity-check matrix is sufficient. For sparse graphs an adjacency list is often the preferred
representation because it uses less space.
TURBO CODES 167
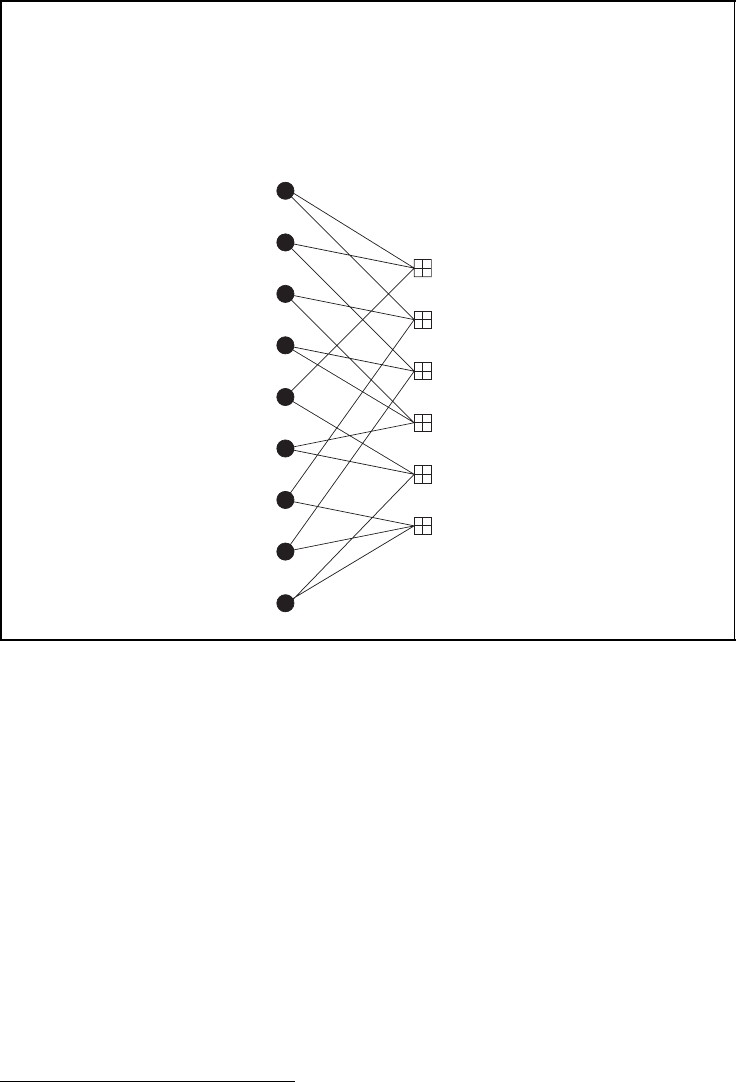
Tanner graph of a regular code
■ All message nodes have the degree 2.
■ All check nodes have the degree 3.
b1
b2
b3
b4
b5
b6
b7
b8
b9
b
1
⊕ b
2
⊕ b
5
= 0
b
1
⊕ b
3
⊕ b
7
= 0
b
2
⊕ b
4
⊕ b
8
= 0
b
3
⊕ b
4
⊕ b
6
= 0
b
5
⊕ b
6
⊕ b
9
= 0
b
7
⊕ b
8
⊕ b
9
= 0
Figure 4.3: Tanner graph of a regular code
b
i
. We call all check nodes that are connected to b
i
the neighbourhood of b
i
and denote it
by the set M
i
={j : h
ji
= 1}. For instance, we have P
1
={1, 4, 5, 7} and M
7
={1, 2, 3}
for the Tanner graph in Figure 4.2.
The Tanner graph in Figure 4.2 defines an irregular code, because the different message
nodes have different degrees (different numbers of connected edges).
4
A graph where all
message nodes have the same degree and all check nodes have the same degree results in
a regular code. An example of a regular code is given in Figure 4.3. The LDPC codes as
invented by Gallager were regular codes. Gallager defined the code with the parity-check
matrix so that every column contains a small fixed number d
m
of 1s and each row contains
a small fixed number d
c
of 1s. This is equivalent to defining a Tanner graph with message
node degree d
m
and check node degree d
c
.
4
In graph theory, the degree of a node is the number of edges incident to the node.
168 TURBO CODES
4.1.2 Decoding for the Binary Erasure Channel
Let us now consider the decoding of an LDPC code. Actually there is more than one
such decoding algorithm. There exists a class of algorithms that are all iterative procedures
where, at each round of the algorithm, messages are passed from message nodes to check
nodes, and from check nodes back to message nodes. Therefore, these algorithms are
called message-passing algorithms. One important message-passing algorithm is the belief
propagation algorithm which was also presented by Robert Gallager in his PhD thesis
(Gallager, 1963). It is also used in Artificial Intelligence (Pearl, 1988).
In order to introduce this message passing, we consider the Binary Erasure Channel
(BEC). The input alphabet of this channel is binary, i.e. F
2
={0, 1}. The output alphabet
consists of F
2
and an additional element, called the erasure. We will denote an erasure by
a question mark. Each bit is either transmitted correctly or it is erased where an erasure
occurs with probability ε. Note that the capacity of this channel is 1 − ε. Consider, for
instance, the code word b = (1, 0, 1, 0, 1, 1, 0, 0, 0) of the code defined by the Tanner
graph in Figure 4.3. After transmission over the BEC we may receive the vector r =
(1, ?, 1, ?, ?, 1, 0, 0, ?).
How can we determine the erased symbols? A simple method is the message passing
illustrated in Figure 4.4. In the first step we assume that all message nodes send the received
values to the check nodes. In the second step we can evaluate all parity-check equations.
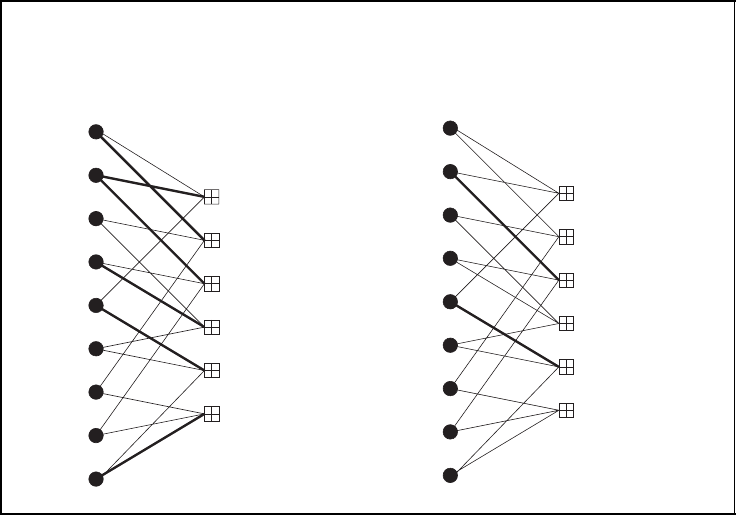
Message passing for the Binary Erasure Channel (BEC)
1st iteration
2nd iteration
1
?
1
?
?
1
0
0
?
b
2
= b
1
⊕ b
5
=?
b
1
= b
3
⊕ b
7
= 1
b
2
= b
4
⊕ b
8
=?
b
4
= b
3
⊕ b
6
= 0
b
5
= b
6
⊕ b
9
=?
b
9
= b
7
⊕ b
8
= 0
1
?
1
0
?
1
0
0
0
b
2
= b
4
⊕ b
8
= 0
b
5
= b
6
⊕ b
9
= 1
Figure 4.4: Message passing for the BEC
TURBO CODES 169
If a single symbol in one of the equations is unknown, e.g. b
4
in b
3
⊕ b
4
⊕ b
6
, then
the parity-check equation determines the value of the erased symbol. In our example,
b
4
= b
3
⊕ b
6
= 0. However, if more than one erasure occurs within a parity-check equation,
we cannot directly infer the corresponding values. In this case we assume that evaluation
of the parity-check equation results in an erasure, e.g. b
2
= b
1
⊕ b
5
=?. All results from
the parity-check equations are then forwarded to the message nodes. Basically, every check
node will send three messages. In Figure 4.4 we have only stated one equation per check
node. The connection for this message is highlighted. With this first iteration of the message-
passing algorithm we could determine the bits b
4
= 0 and b
9
= 0. Now, we run the same
procedure for a second iteration, where the message nodes b
4
and b
9
send the corrected
values. In Figure 4.4 we have highlighted the two important parity-check equations and
connections that are necessary to determine the remaining erased bits b
2
= 0 and b
5
= 1.
4.1.3 Log-Likelihood Algebra
To discuss the general belief propagation algorithm, we require the notion of a log-likelihood
ratio. The log-likelihood algebra, as introduced in this section, was developed by Hagenauer
(Hagenauer et al., 1996). Let x be a binary random variable and let Pr{x = x
} denote the
probability that the random variable x takes on the value x
. The log-likelihood ratio of x
is defined as
L(x) = ln
Pr{x = 0}
Pr{x = 1}
,
where the logarithm is the natural logarithm. The log-likelihood ratio L(x) is also called
the L-value of the binary random variable x. From the L-value we can calculate the
probabilities
Pr{x = 0}=
1
1 + e
−L(x)
and Pr{x = 1}=
1
1 + e
L(x)
.
If the binary random variable x is conditioned on another random variable y, we obtain
the conditional L-value
L(x|y) = ln
Pr{x = 0|y}
Pr{x = 1|y}
= ln
Pr{y|x = 0}
Pr{y|x = 1}
+ ln
Pr{x = 0}
Pr{x = 1}
= L(y|x) + L(x).
Consider, for example, a binary symbol transmitted over a Gaussian channel. With binary
phase shift keying we will map the code bit b
i
= 0 to the symbol −1 and b
i
= 1to+1. Let
r
i
be the received symbol. For the Gaussian channel with variance σ and signal-to-noise
ratio
E
s
N
0
=
1
2σ
2
, we have the probability density function
p(r
i
|b
i
) =
1
√
2πσ
exp
−(r
i
− (1 −2b
i
))
2
2σ
2
.
Thus, for the conditional L-values we obtain
L(r
i
|b
i
) = ln
Pr{r
i
|b
i
= 0}
Pr{r
i
|b
i
= 1}
= ln
p(r
i
|b
i
= 0)
p(r
i
|b
i
= 1)
170 TURBO CODES
= ln
exp
−
E
s
N
0
(r
i
− 1)
2
exp
−
E
s
N
0
(r
i
+ 1)
2
=−
E
s
N
0
(r
i
− 1)
2
− (r
i
+ 1)
2
= 4
E
s
N
0
r
i
.
As L(r
i
|b
i
) only depends on the received value r
i
and the signal-to-noise ratio, we will
usually use the shorter notation L(r
i
) for L(r
i
|b
i
). The a-posteriori L-value L(b
i
|r
i
) is
therefore
L(b
i
|r
i
) = L(r
i
) + L(b
i
) = 4
E
s
N
0
r
i
+ L(b
i
).
The basic properties of log-likelihood ratios are summarised in Figure 4.5. Note that the
hard decision of the received symbol can be based on this L-value, i.e.
ˆ
b
i
=
%
0ifL(b
i
|r
i
)>0 ,i.e. Pr{b
i
= 0|r
i
} > Pr{b
i
= 1|r
i
}
1ifL(b
i
|r
i
)<0 ,i.e. Pr{b
i
= 0|r
i
} < Pr{b
i
= 1|r
i
}
.
Furthermore, note that the magnitude |L(b
i
|r
i
)| is the reliability of this decision. To see this,
assume that L(b
i
|r
i
)>0. Then, the above decision rule yields an error if the transmitted
bit was actually b
i
= 1. This happens with probability
Pr{b
i
= 1}=
1
1 + e
L(b
i
|r
i
)
,L(b
i
|r
i
)>0.
Now, assume that L(b
i
|r
i
)<0. A decision error occurs if actually b
i
= 0 was transmitted.
This event has the probability
Pr{b
i
= 0}=
1
1 + e
−L(b
i
|r
i
)
=
1
1 + e
|L(b
i
|r
i
)|
,L(b
i
|r
i
)<0.
Hence, the probability of a decision error is
Pr{b
i
=
ˆ
b
i
}=
1
1 + e
|L(b
i
|r
i
)|
and for the probability of a correct decision we obtain
Pr{b
i
=
ˆ
b
i
}=
e
|L(b
i
|r
i
)|
1 + e
|L(b
i
|r
i
)|
.
Up to now, we have only considered decisions based on a single observation. In the
following we deal with several observations. The resulting rules are useful for decoding.
If the binary random variable x is conditioned on two statistically independent random
variables y
1
and y
2
, then we have
L(x|y
1
,y
2
) = ln
Pr{x = 0|y
1
,y
2
}
Pr{x = 1|y
1
,y
2
}
= ln
Pr{y
1
|x = 0}
Pr{y
1
|x = 1}
+ ln
Pr{y
2
|x = 0}
Pr{y
2
|x = 1}
+ ln
Pr{x = 0}
Pr{x = 1}
= L(y
1
|x) + L(y
2
|x) + L(x).
TURBO CODES 171
Log-likelihood ratios
■ The log-likelihood ratio of the binary random variable x is defined as
L(x) = ln
Pr{x = 0}
Pr{x = 1}
(4.1)
■ From the L-value we can calculate the probabilities
Pr{x = 0}=
1
1 + e
−L(x)
and Pr{x = 1}=
1
1 + e
L(x)
(4.2)
■ If the binary random variable x is conditioned on another random variable
y, or on two statistically independent random variables y
1
and y
2
,weobtain
the conditional L-values
L(x|y) = L(y|x) + L(x) or L(x|y
1
,y
2
) = L(y
1
|x) + L(y
2
|x) + L(x) (4.3)
■ For the Gaussian channel with binary phase shift keying and signal-to-noise
ratio
E
s
N
0
we have the a-posteriori L-value
L(b
i
|r
i
) = L(r
i
|b
i
) + L(b
i
) = 4
E
s
N
0
r
i
+ L(b
i
) (4.4)
where b
i
is the transmitted bit and r
i
is the received symbol.
Figure 4.5: Log-likelihood ratios
This rule is useful whenever we have independent observations of a random variable, for
example for decoding a repetition code. Consider, for instance, the code B ={(0, 0), (1, 1)}.
We assume that the information bit u is equally likely to be 0 or 1. Hence, for a memoryless
symmetrical channel we can simply sum over the received L-values to obtain L(u|r) =
L(r
1
) + L(r
2
) with the received vector r = (r
1
,r
2
).
Consider now two statistically independent random variables x
1
and x
2
. Let ⊕ denote
the addition modulo 2. Then, x
1
⊕ x
2
is also a binary random variable with the L-value
L(x
1
⊕ x
2
). This L-value can be calculated from the values L(x
1
) and L(x
2
)
L(x
1
⊕ x
2
) = ln
Pr{x
1
= 0}Pr{x
2
= 0}+Pr{x
1
= 1}Pr{x
2
= 1}
Pr{x
1
= 1}Pr{x
2
= 0}+Pr{x
1
= 0}Pr{x
2
= 1}
.
Using Pr{x
1
⊕ x
2
= 0}=Pr{x
1
= 0}Pr{x
2
= 0}+(1 −Pr{x
1
= 0})(1 −Pr{x
2
= 0}) and
Equation (4.2), we obtain
Pr{x
1
⊕ x
2
= 0}=
1 + e
L(x
1
)
e
L(x
2
)
(1 + e
L(x
1
)
)(1 + e
L(x
2
)
)
.

172 TURBO CODES
Similarly, we have
Pr{x
1
⊕ x
2
= 1}=
e
L(x
1
)
+ e
L(x
2
)
(1 + e
L(x
1
)
)(1 + e
L(x
2
)
)
which yields
L(x
1
⊕ x
2
) = ln
1 + e
L(x
1
)
e
L(x
2
)
e
L(x
1
)
+ e
L(x
2
)
.
This operation is called the boxplus operation, because the symbol is usually used for
notation, i.e.
L(x
1
⊕ x
2
) = L(x
1
) L(x
2
) = ln
1 + e
L(x
1
)
e
L(x
2
)
e
L(x
1
)
+ e
L(x
2
)
.
Later on we will see that the boxplus operation is a significant, sometimes dominant portion
of the overall decoder complexity with iterative decoding. However, a fixed-point Digital
Signal Processor (DSP) implementation of this operation is rather difficult. Therefore, in
practice the boxplus operation is often approximated. The computationally simplest estimate
is the so-called max-log approximation
L(x
1
) L(x
2
) ≈ sign(L(x
1
) · L(x
2
)) · min
{
|L(x
1
)|, |L(x
2
)|
}
.
The name expresses the similarity to the max-log approximation introduced in Section 3.5.2.
Both approximations are derived from the Jacobian logarithm.
Besides a low computational complexity, this approximation has another advantage,
i.e. the estimated L-values can be arbitrarily scaled, because constant factors can be
cancelled. Therefore, an exact knowledge of the signal-to-noise ratio is not required.
The max-log approximation is illustrated in Figure 4.6 for a fixed value of L(x
2
) =
2.5. We observe that maximum deviation from the exact solution occurs for
|
|L(x
1
)|−
|L(x
2
)|
|
= 0.
We now use the boxplus operation to decode a single parity-check code B(3, 2, 2) after
transmission over the Additive White Gaussian Noise (AWGN) channel with a signal-to-
noise ratio of 3 dB (σ = 0.5). Usually, we assume that the information symbols are 0 or
1 with a probability of 0.5. Hence, all a-priori L-values L(b
i
) are zero. Assume that the
code word b = (0, 1, 1) was transmitted and the received word is r = (0.71, 0.09, −1.07).
To obtain the corresponding channel L-values, we have to multiply r by 4
E
s
N
0
=
2
σ
2
= 8.
Hence, we have L(r
0
) = 5.6, L(r
1
) = 0.7 and L(r
2
) =−8.5. In order to decode the code,
we would like to calculate the a-posteriori L-values L(b
i
|r). Consider the decoding of the
first code bit b
0
which is equal to the first information bit u
0
. The hard decision for the
information bit ˆu
0
should be equal to the result of the modulo addition
ˆ
b
1
⊕
ˆ
b
2
. The log-
likelihood ratio of the corresponding received symbols is L(r
1
) L(r
2
). Using the max-log
approximation, this can approximately be done by
L
e
(u
0
) = L(r
1
) L(r
2
)
≈ sign
(
L(r
1
) · L(r
2
)
)
· min
{
|L(r
1
)|, |L(r
2
)|
}
≈ sign(0.7 ·(−8.5)) · min
{
|0.7|, |−8.5|
}
≈−0.7.
TURBO CODES 173
Boxplus operation
■ For x
1
and x
2
, two statistically independent binary random variables, x
1
⊕ x
2
is also a binary random variable. The L-value L(x
1
⊕ x
2
) of this random
variable is calculated with the boxplus operation
L(x
1
⊕ x
2
) = L(x
1
) L(x
2
) = ln
1 + e
L(x
1
)
e
L(x
2
)
e
L(x
1
)
+ e
L(x
2
)
(4.5)
■ This operation can be approximated by
L(x
1
) L(x
2
) ≈ sign(L(x
1
) · L(x
2
)) · min
{
|L(x
1
)|, |L(x
2
)|
}
(4.6)
as illustrated in the following figure for L(x
2
) = 2.5
Ŧ10 Ŧ8 Ŧ6 Ŧ4 Ŧ2 0 2 4 6 8 10
Ŧ3
Ŧ2
Ŧ1
0
1
2
3
exact value
approximation
L(x
1
)
L(x
1
) L(x
2
)
Figure 4.6: Illustration of the boxplus operation and its approximation. Reprinted with
permission from 2001 IEEE.
The value L
e
(u
0
) is called an extrinsic log-likelihood ratio. It can be considered as the
information that results from the code constraints. Note that this extrinsic information is
statistically independent of the received value r
0
. Therefore, we can simply add L
e
(u
0
) and
L(u
0
|r
0
) = L(r
0
) to obtain the a-posteriori L-value
L(u
0
|r) = L(r
0
) + L
e
(u
0
) ≈ 4.9.
For the two other bits we calculate the extrinsic L-values L
e
(u
1
) =−5.6 and L
e
(b
2
) = 0.7,
as well as the a-posteriori L-values L(u
1
|r) =−4.9 and L(b
2
|r) =−7.7. The hard decision
results in
ˆ
b = (0, 1, 1).
174 TURBO CODES
4.1.4 Belief Propagation
The general belief propagation algorithm is also a message-passing algorithm similar to
the one discussed in Section 4.1.2. The difference lies in the messages that are passed
between nodes. The messages passed along the edges in the belief propagation algorithm
are log-likelihood values. Each round of the algorithm consists of two steps. In the first
half-iteration, a message is sent from each message node to all neighbouring check nodes.
In the second half-iteration, each check node sends a message to the neighbouring message
nodes. Let L
l
[b
i
→ c
j
] denote the message from a message node b
i
to a check node c
j
in
the lth iteration. This message is computed on the basis of the observed channel value r
i
and
some of the messages received from the neighbouring check nodes except c
j
according
to Equation (4.7) in Figure 4.7. It is an important aspect of belief propagation that the
message sent from a message node b
i
to a check node c
j
must not take into account the
message sent in the previous round from c
j
to b
i
. Therefore, this message is explicitly
excluded in the update Equation (4.7). Remember that M
i
denotes the neighbourhood of
the node b
i
.
The message L
l
[c
j
→ b
i
] from the check node c
j
to the message node b
i
is an extrinsic
log-likelihood value based on the parity-check equation and the incoming messages from
all neighbouring message nodes except b
i
. The update rule is given in Equation (4.8). The
symbol
#
denotes the sum with respect to the boxplus operation.
Consider now the code defined by the Tanner graph in Figure 4.3. We consider transmis-
sion over a Gaussian channel with binary phase shift keying. Suppose the transmitted code
word is b = (+1, −1, −1, −1, −1, +1, −1, +1, −1). For this particular code word we may
obtain the following channel L-values L(r) = 4
E
s
N
0
· r = (5.6, −10.2, 0.7, 0.5, −7.5, 12.2,
−8.5, 6.9, −7.7). In the first step of the belief propagation algorithm the message nodes
pass these received values to the neighbouring check nodes. At each check node we calcu-
late a message for the message nodes. This message takes the code constraints into account.
For the first check node this is the parity-check equation b
1
⊕ b
2
⊕ b
5
= 0. Based on this
Update equations for belief propagation
■ Messages from message nodes to check nodes
L
l
[b
i
→ c
j
] =
%
L(r
i
) if l = 1
L(r
i
) +
#
j
∈M
i
\{j }
L
l−1
[c
j
→ b
i
] if l>1
(4.7)
■ Messages from check nodes to message nodes
L
l
[c
j
→ b
i
] =
i
∈P
j
\{i}
L
l−1
[b
i
→ c
j
] (4.8)
Figure 4.7: Update equations for the message passing with belief propagation
TURBO CODES 175
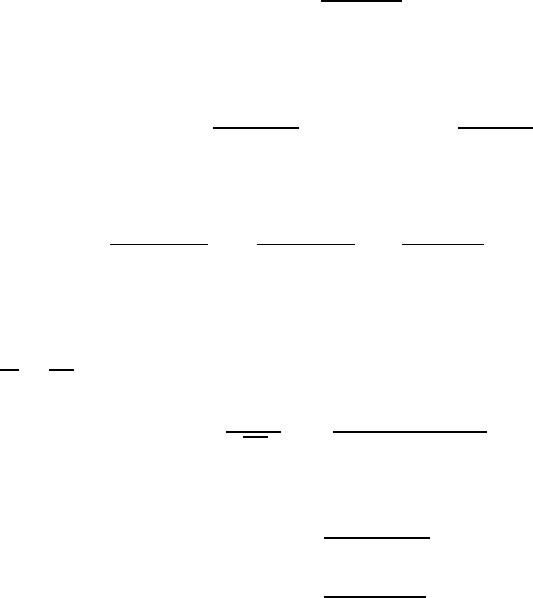
Example of belief propagation
1st iteration
2nd iteration
5.6
−10.2
0.7
0.5
−7.5
12.2
−8.5
6.9
−7.7
L
1
[c
1
→ b
2
] ≈−5.6
L
1
[c
2
→ b
1
] ≈−0.7
L
1
[c
3
→ b
2
] ≈ 0.5
L
1
[c
4
→ b
4
] ≈ 0.7
L
1
[c
5
→ b
5
] ≈−7.7
L
1
[c
6
→ b
9
] ≈−6.9
12.4
−15.3
−4.4
−5.7
−20.8
20.2
−14.7
14.1
−22.1
L
2
[b
1
→ c
1
] ≈ 4, 6
L
2
[b
1
→ c
2
] ≈ 13, 1
Figure 4.8: Example of belief propagation
equation, we calculate three different extrinsic messages for the three neighbouring message
nodes
L
e
(b
1
) = L(b
2
⊕ b
5
) = L(b
2
) L(b
5
) ≈ 7.5,
L
e
(b
2
) = L(b
1
⊕ b
5
) = L(b
1
) L(b
5
) ≈−5.6,
L
e
(b
5
) = L(b
1
⊕ b
2
) = L(b
1
) L(b
2
) ≈−5.6.
Similarly, we can calculate the messages for the remaining check nodes. Some of these
messages are provided in Figure 4.8, where the corresponding connections from check node
to message node are highlighted.
The extrinsic L-values from the check nodes are based on observations that are sta-
tistically independent from the received value. Therefore, we can simply add the received
channel L-value and the extrinsic messages for each message node. For instance, for the
node b
1
we have L(b
1
) = L(r
1
) + L(b
2
⊕ b
5
) + L(b
3
⊕ b
7
) ≈ 12.4. If we do this for all
message nodes we obtain the values given in Figure 4.8. These are the L-values for the
message nodes after the first iteration.
As mentioned above, it is an important aspect of belief propagation that we only pass
extrinsic information between nodes. In particular, the message that is sent from a message