Онищенко Г.Б. и др. Автоматизированный электропривод промышленных установок
Подождите немного. Документ загружается.

где Р,- номинальная мощность электродвигателя по ка
логу; 1,05-;-1,2 - коэффициент запаса, учитывающий неточ
ста расчета сил сопротивления.
3. Электродвигатель при необходимости проверяется на nj
регрузочную способность по зФювиям пуска
*K,(M
c
+M
0
) = K,(M
r
+J-a), (24.^
M
a
=J— или M,=J — a (24.
>п К
где М
а
М
а
- статический и динамический моменты
ления, Нм; J - приведенный к валу
электродвигателя суммарный мо-
мент инерции, кгм ; а - норми-
рованное значение линейного
ускорения, м/с
2
; /„- время пуска.
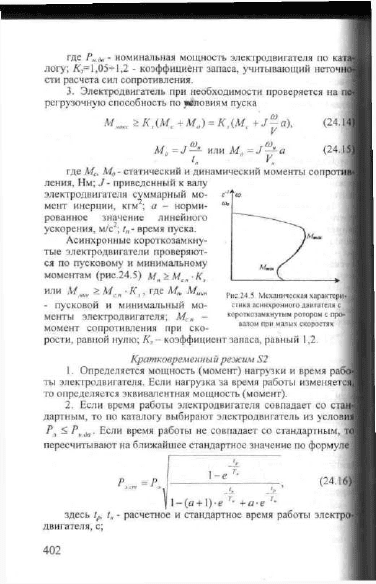
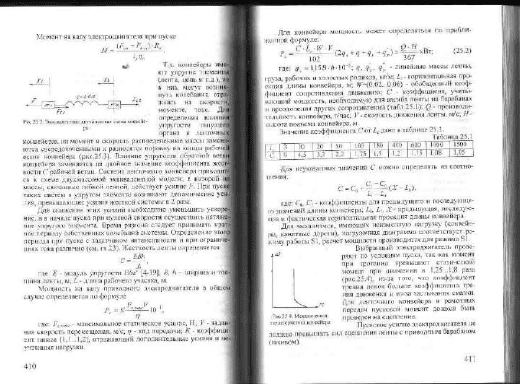
Асинхронные короткозамкну-
тые электродвигатели проверяют-
ся по пусковому и минимальному
моментам (рис.24.5) М„>М,.
п
К
1
или М
шн
> М
сп
• К,, где М,„ М
Лшн
- пусковой и минимальный мо-
менты электродвигателя; М
сп
-
момент сопротивления при ско-
рости, равной нулю; К,— коэффициент запаса, равный 1,2.
Кратковременный режим S2
1. Определяется мощность (момент) нагрузки и время ра
ты электродвигателя. Если нагрузка за время работы изменя
то определяется эквивалентная мощность (момент).
2. Если время работы электродвигателя совпадает со ст-
дартным, то по каталогу выбирают электродвигатель из уело*
Р
э
< Р
11дв
. Если время работы не совпадает со стандартным,
пересчитывают на ближайшее стандартное значение по форму
Р
зхт
=Р, —V -, (24.16)
К 1-(а +
1)-е
г
*
+а е
г
*
здесь tp, („ - расчетное и стандартное время работы эле:
двигателя, с;
стока асинхронного двигателя с
короткозамкнутым ротором с про-
валом при малых скоростях
АР
с
- отношение постоянных потерь к переменным
номинальной
нагрузке
нам
= Д Р
мм
= /;/?.
где
Т„
- постоянная времени нагрева электродвигателя; опре-
деляется для электродвигателя мощностью, равной Р
3
\ R=R„+R
im
для двигателей постоянного тока независимого возбуждения;
=R„+R,)„+R
e
- для двигателей постоянного тока последователь-
ого возбуждения; R = 3(] + Д)/?
2
- для асинхронного двигателя;
=7>R\
- для синхронного двигателя.
По Р
зх
„ выбирают электродвигатель для принятого стан-
артного времени из условия
Р„.ав>Рэ.ст.
Если t
p
>t
pii cm
, электродви-
атель должен быть проверен на допустимую нагрузку.
Асинхронный короткозамкнутый двигатель проверяется по
сковому моменту: М
п
> \ ,2М
стмтс
и перегрузочной способности
кс
>М
смжс
, где: M
CMt
uic - максимальный статический момент,
р.сли для кратковременного режима работы выбирается двига-
ель, предназначенный для продолжительного режима, то
(24.17)
• +1
Если отношение л < о 35, электродвигатель проверяют
Т„ '
лько по перегрузочной способности. Вывод исходных формул
усмотрите в [4-15].
Повторно-кратковременны й режим
Определяются мощность (момент), время работы и паузы
каждой операции в цикле.
2. Строятся нагрузочная диаграмма и тахограмма.
3. Если нагрузка переменная, то определяется эквивалент-
ная мощность (момент).
4. Определяется продолжительность включения
ZV
1W
>
пв.
(24.18)
где: - сумма времени работы и пауз, если в ци"
несколько операций.
5. Если
ПВ
р
=ПВ
ст
,
то при соответствующем стандар
ПВ% выбирают электродвигатель из условия
P»,
M
>KjPp
Cm
,
/(,= 1,1+1.,5 - коэффициент запаса, зависит от частоты включег
к
и отношения ——.
J„
В случае, если расчетная ПВ не соответствует стандарт:
то эквивалентную мощность приводят к стандартной по форму;
""
р
\пв,
т
Электродвигатель выбирается из условия
Р
к0
,>К,-Р
1ст
. (24.2
6. Проверяется электродвигатель по условиям пуска пг
максимальной статической нагрузке и заданном ускорении
формуле (24.14),а также на перегрузочную способность.
7. Производится уточненный расчет на нагрев:
а) определяются моменты электродвигателей при пуске
торможении исходя из уравнения движения
dt
Динамический момент находят по формулам (24.15).
б) строится нагрузочная диаграмма электропривода М(1) и!
/(/) с учетом динамического момента при пуске и торможен"^
Для этого определяют время пуска (торможения) и время уста"
вившегося движения для каждой операции (см.рис.24.3);
в) определяется уточненная продолжительность включени
г) вычисляется эквивалентный момент (ток)
М
I
M
l\'nl
+
Mjl'n
+
M
Ll'y\
+
•••
+
+
Мтт'т*
+
M
Lj,„
(24 21))
' V
Pit*
+
'г,
+
•••+',» +t,J
+
'
yl
+ ••• + ',«
где: M„i, M
nm
. М-,,. М,
шш
M
Lni/
, M
imm
- моменты электроде и
теля при пуске, торможении (электрическом) и установивше:"
движении, при различных операциях в цикле; l
n/
. /,,. /„/, /„„,, /
Гс
-
t
ym
- время пуска, торможения и установившегося движения пр
различных операциях; р = *
+
- коэффициент ухудшения те;
лоотдачи двигателя при изменении скорости двигателя.
д) эквивалентный момент (ток) М, приводится к ближайше-
\ПВ„
му стандарту ПВ м =М — ;
' \ ПВ„,
е) если удовлетворяется условие М„
т
> М.
хш
, то двигатель
проходит по нагреву.
В данном случае нельзя воспользоваться методом эквива-
лентной мощности, так как при работе (пуск, останов) скорость
двигателя не остается постоянной.
При повторно-кратковременных режимах S4, S5 асинхрон-
ные короткозамкнутые электродвигатели, работающие от сети,
обязательно проверяются на допустимую частоту включения в
час, т.к. при малых продолжительностях цикла возрастает доля
пусковых и тормозных потерь в общем балансе энергии за цикл.
Частота включения для двигателей, работающих в повторно-
кратковременном режиме [4-15], определяется по формуле:
й =
3
600
(24.22,
м
п
+м
т
где: АА
П
,АА
т
- потери энергии при пуске и торможении; е -
относительная продолжительность включения; ЛР„,АР - потери
мощности при установившемся режиме - номинальные и факти-
ческие.
Проверка пускового .момента по условиям сцепления
Механизмы передвижения кранов, ременные передачи, лен-
точные конвейеры и др., где передача или движение осуществля-
ется за счет сил сцепления, пусковой момент электродвигателя
должен быть проверен по условиям сцепления, т.е. он не должен
быть больше сил сцепления (трения). Для механизмов передви-
жения проверка осуществляется по условию
ur-N-D-a 0,8 u/N-V-a
m
= *С _ +
М
м
„
< 0,8— ^ = — St,
2/ •
7 • а,
и
• m <о„,
Ч-а
т
-т
где: М
пЛв
- пусковой момент двигателя, Нм; 0,8 - коэффици-
ент, учитывающий неравномерное распределение нагрузки на
приводные колеса; У=0,2 и 0,12 - коэффициент сцепления для
кранов, работающих внутри помещения и на открытом воздухе
соответственно; N - нормальное давление на колеса, Н; D - диа-
метр колеса, м; а
пр
,
а„„
- количество приводных и опорных колес;
т - количество двигателей; У - скорость передвижения, м/с.
Условия проверки пускового момента сцепления для конв
еров и рольгангов приведены ниже
вня с постоянной нагрузкой
Механизмы непрерывного действия с постоянной иагруз
-
Делят на две группы: с сосредоточенной и распределенной
грузкой
К первой группе отноогтея механизмы главного двнже
некоторых видов токарных, карусельных и других станков,
правило, ередних
и
тяжелы* групп.
Ко второй конвейеры, эскалаторы, кольцевые канатные
Общее в
JTHX
механизмах - это продолжительный режим
боты электродвигателя. При расчете его .мощности, как прави,
не учитывают нагрузки при пуске и тормаженкп. Электропри
механизмов первой группы будет рассмотрен в разделе эдек
нрияод металлорежущих, станков. Электропривод механнз
второй группы рассмотрен на примере конвейеров.
магическую цепь, содержат упругие .механические звенья,
влияет на выбор тина электропривода и системы управления
за необходимости демпфирован™ механических колебаний
25.1.1. Требования, предъявляемые к
элек1
ринриноду
ханнзмов с распределенной нагрузкой
I. Регулирование скорости не требуется или требуется в
Вольтом диапазоне D-2...5.
406
пробуке
вязей. Желательно [4-17], чтобы
зл характеристику с постепенным
ленты и ограниченной величиной
момен
т в процессе разгона до
<1. При работе с несколькими приводными барабанами при-
род должен обеспечивать синхронизацию работы приводных ба-
рабанов, т.е. установления расчетного распределения тягового
5. Привода мощных конвейеров с высокой скоростью лим-
итна ленты должны обеспечивать пониженную скорость 1м/с
лля проведения
ее
осмотра.
6. Привод мощных конвейеров должен обеспечивать реверс
25.1.2. Онределсш
ги
[4-12]
Ш
=
C,qI
cos
р
+ qlSill
р
=
ql{C, cos fi
+ sil
где: q - весовая нагрузка на 1 метр пути, №'м. В at
I
рузку входят
вес
транспортируемого материала, вес ж
о:шрных роликов, I - длина участка в .«играх: /I - уго
конвейера (рис.25.1): С„ - результирующий коэффицш
407

где'
Q„-проИтолителыюсть
конвейера, г/час;
V -
скорость, м
На участках изгиба (рис.25.2) сила сопротивления движен
состоит из двух слагаемых; силы от изгиба тягового элемгг
пропорциональной натяжению в набегающей точке участка
силы трения в подшипниках блоков или роликов, пропори.'
шшьной равнодействующей cfuitt
JV,на участке.
Следовательно:
где: с
- коэффициент
от
изгиба тягового Элемента.
В конвейерных установках обычно T
r6
»G,
этому при определении равнодействующей N
весом
блока О
гт
небрегаюг и принимают, что Натяжение в набегающей
Г.-
;
и с
гающей точках равны. Прн этом
= Ш.ш,
где: С, = s
+
2;u^sin| - результирующий кооффициент
Для ленточного конвейера при изгибе ленты на барабане
«=90...180' С.К1-6)
Ю ",
л при изгибе ленты на роликовой 6а
рее
и
угле обхвата
«=20-15*
С,-(
1.2...3)
10'
1
.
Сила сопротивления вызывает увеличение натяжения тя
вого элемента на каждом участке Для прямолинейного учас
Tm~-T*r&F
n
для участка изгиба где
-коэффициент увеличения натяжения на данном участке.
г,, %&>•'» (С омД + SinД)+£с,г
ч
.
Так как
силу;
F
m
должен преодолеть приводной олсмент. то
[при установившемся движении-разность натяжений па нем урап-
Усилие
Т,а
должно быть не меньше минимально допустимо-
то натяжения Тс&Тт Минимальное натяжение определяется ус-
ловием допустимого провиса тягового органа,
'.уравнением |4-1»]: "
е
" °"Р
е
*
,сля
'-
т
'-
я
г
>
т
_ Щг Ц,
""" ° вг^
где: д,., - масса груза и ленты конвейера на
1
метр длины,
Г
чи:
-(0д>25...0,03)
-
допустимая величина провисания ленты, м,
По
условию
сцепления Г,.. > ,
где: к
-
угол обхвата барабана в радианах;#Ч),1...0,35 - коэффи-
циент трения'Между лентой и.барабаном;
T
M
-'J'„i/•[.„i-ma
- набе-
rmoiuee натяжение приводного
барабана;
m - масса поступатбиь-
ио
движущихся'мастей конвейера; а - ускорение при пуске.
И?
двух результатов выбирается большее значение.
Динамические нагрузки привода конвейера возникают в
; процессе
пуска и определяются движущимися массами собствен-
но конвейера
и
его приводной станции
где:
F..„, -
динамическая сила
на обводе
приводного элемента
с радзуеЪй 'Щ
in,
- движущаяся масса одного прямолинейного
(для роликов щ
=
—. п - количество роликов);
J
K
•
момент
инерции двигателя и приводного элемента (барабана, редуктора),
I,,
- передаточное число редуктора приводной станции; а, - уско-
рение коноейёрз-
Механизмы с распределенной нагрузкой могут иметь одн
расположение приводной станции на трассе не обсспсчи
ванию скорости в механизмах с рассредоточенной нагруз^
применяются: электроприводы с короткозамкиугыми асинх
хронные электродвигатели с фазным ротором для конвейерн!
линий большой протяженности дня обеспечения плавного пус
Для приводов, где требуется регулирование скорости, наиб
лее перспективен электропривод по схеме ПЧ-ЛД, возню-
также применение системы АВК и электроприводов постоянн
получения благоприятного распределения нагрузки между двш
телями применяют асинхронные короткозамкнутые двигатели
повышенным скольжением
ЧЭ.Й
асинхронные двигатели
с
фазнь
ротором. В первом случае улучшается распределение нагру
между элрктр0двжатс.'1ими благодаря более мягким механич
еким характеристикам. Во втором случае механические харак
ристикн выравниваю!ся с помощью включения в цепь ротора о
него из двигателей добавочного сопротивления. Кроме тог
применение асинхронных двигателей с фазным роторам номо
решшь проблему плавности пуска
и
ограничения пусковых тою
т иристорного регулятора гока
в
цепи ротора [4-12].
Управление электроприводами одиночных конвейеров, :
связанных с другими механизмами, производится посредстве
максимальной
и
тепловой защитой.
Волее сложны схемы управления совместно работающич
конвейерами иди поточно-транспортными системами ПТС. В с
новс проектирования схем управления такими транспорт
системами лежат
следующие
требования:
1. Пуск двигателей конвейеров должен производиться
"в
и
правлении, обратном технологическому потоку: чтобы на ко
вейерах
не
образовывалось
завала
транспортируемого груза.
транспортной пинии первш
-о конвейера, с которого пост
материал на другие конвейеры, а 3
4. Для предотвращения большой
должны пускаться поочередно.
5. Дчя опробования н наладки конвейеров следует обеспе-
чить возможность пуска и остановки любого из них независимо
от других конвейеров (обычно нуек
и
остановка при наладке про-
изводятся с рабочего места).
6. В схемах необходимо предусматривать предпусковую
(световую и звуковую) и аварийную сигнализацию, а также сиг-
нализацию о работе всех агрегатов.
7. Конвейеры большой протяженности оснащаются кнопка-
и промышленных транспортных
|ь исправного состояния тягового элемента (ленты.
I и отключение установки при чрезмерной вытяжке
t. слабом натяжении, сходе с направляющих
IX
барабанов
и
шкивов:
1С
установки при превышении скорости:
ie
установки
при
затянувшемся пуске,
- предупреждение завалов бункеров загрузочных и перегру-
- обеспечение требуемой m
- туроокомпрессоры. I
осевые вентиляторы и
Работу центробе*
центробежного наюса,

пятками и корпуса спиральной формы. При вращении районе!
колеса жидкость увлекается лопатками и под действием центр
бежнон силы н силы кориолиса движется от центра колеса к е(
периферии вдоль лопаток, ззтемподается через спираль,
меру в нагнетательную трубу,
rfjfii
этом в центре корпуса
етея разряжение, под действием которого вода через веа.....„,
тцую трубу подается в насос. Частицу жидкости участвуют;
двух движениях: вращательном, вместе с колесом, прноброта
.окружную-.скорость! и,линейном вдоль лопаток, приобретая "-
e.Hiiyibiiyio
линейную
скорость.
•Мощность, развиваемая насосом или вентилятором,
дится
из
выражения энергии, сообщаемой движущейся жн
;
(газу)
в
единицу времени
А = "—, (25J
уравнение (25.3) пс
Если учесть, что SV=Q- подача i
)р
(удельное давление),
Н<м"
(Па): тс
случае р -
'
^ кВт.
гдегш - скорость
д.
гидравлический
кпд
у,,-(0,8...0,96) и объемный
>|„-*((1,%
0,98)
j-lanop часто выражают- в метрах водяного, столба. В
102/7
Принимая, что скорость движе!
радиус колеса
J2
=
ш_ Н
=
й>1