Основы электропривода, автоматизированный электропривод, теория электропривода 310 стр. (Укр)
Подождите немного. Документ загружается.

пояснюється тим, що при малих моментах навантаження
магнітна система не насичена, потік значно зростає від
додавання до сталої величини м.р.с. обмотки НЗ змінну
величину м.р.с. обмотки ПЗ.
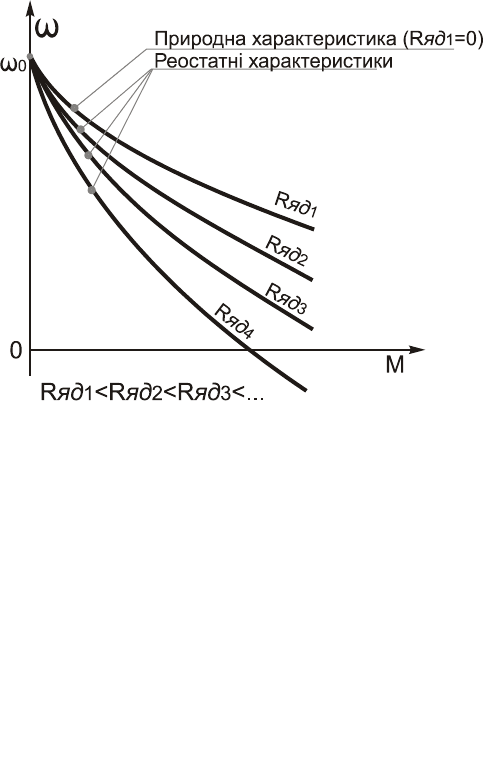
Рисунок 3.23 – Механічні характеристики ДПС МЗ.
При значних моментах навантаження, а отже й значній
м.р.с. обмотки ПЗ настає насичення магнітної системи двигуна,
потік стає сталим, а падіння швидкості, таким чином, буде
обумовлюватись в основному тільки падінням напруги у
якірному колі.
Механічна характеристика буде тим м’якшою, чим
більшим буде вплив обмотки ПЗ. При збільшенні опору в
якірному колі швидкість двигуна зменшується (дивись рисунок
3.23) й характеристики становляться більш м’якими. При
великих опорах у якірному колі (наприклад,
4яд
R
) двигун під
впливом потенціального статичного момента може плавно
перейти із двигуневого режиму у гальмівний (четвертий
квадрант).
91

Для збереження узгодженої дії обмоток НЗ й ПЗ
реверсування ДПС МЗ здійснюється зміною напрямку струму
якоря.
3.9 Статичні характеристики ДПС МЗ у гальмівних
режимах
На відміну від ДПС ПЗ, двигун, що розглядається має усі
три способи електричного гальмування:
- рекуперативне;
- противвімкненням;
- динамічне.
3.9.1 Можливість рекуперативного гальмування
обумовлена наявністю магнітного потоку обмотки НЗ.
Незалежний потік дозволяє двигуну при досягненні швидкості,
що перевищує швидкість ідеального неробочого ходу
0
,
перейти у режим рекуперативного гальмування (генераторний з
віддачею енергії в мережу). Однак при віддачі енергії у мережу
напрямок струму в якорі й обмотці ПЗ зміниться на
протилежний, і тому м.р.с. обмотки ПЗ при цьому буде
здійснювати розмагнічувальну дію, що викличе уповільнене
збільшення гальмівного момента з ростом струму.
Щоб цього не трапилось йдуть двома шляхами.
1-й шлях. Змінити напрямок струму в обмотці ПЗ. Цей
шлях складний, ним майже не користуються.
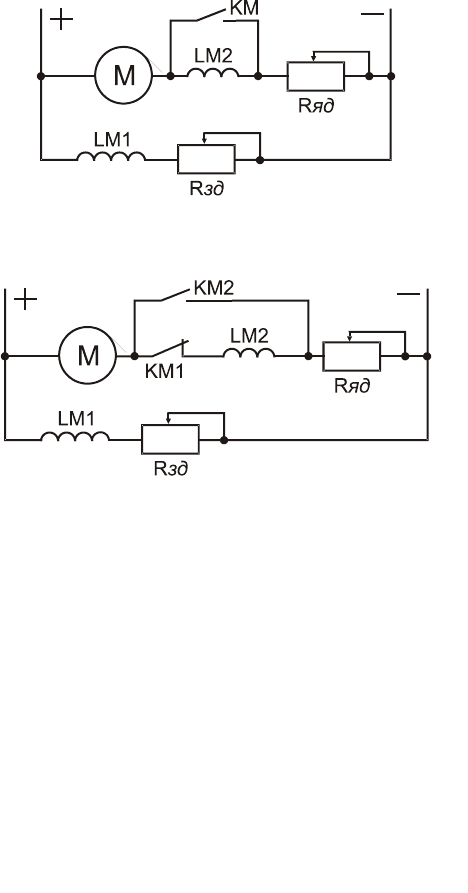
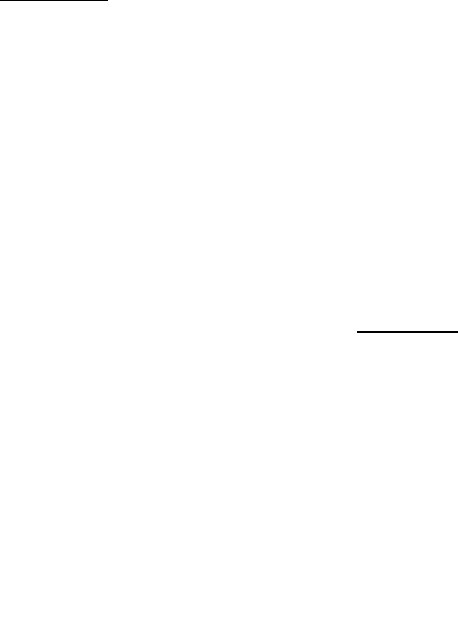
2-й шлях. Цей шлях широко використовується (рисунок
3.24).
92
а)
б)
а – з зашунтованою обмоткою LM2;
б – з вимкненою обмоткою LM2;
Рисунок 3.24 – Схема рекуперативного гальмування.
Тут ДПС МЗ перетворюють у ДПС НЗ для чого обмотку
ПЗ (LM2) або закорочують шунтівним контактором КМ
(рисунок 3.24, фрагмент а), або вимикають (рисунок 3,24,
фрагмент б), у цій схемі додатково використовуються два
контактори (КМ1 розмикається, КМ2 замикається) замість
одного, як це передбачено схемою фрагмента а.
Таким чином, при рекуперативному гальмуванні машина
працює як генератор незалежного збудження. Тому механічні
характеристики прямолінійні (характеристики
1
й
2
), як і у
двигуна незалежного збудження (рисунок 3.25). Характеристики
1 й 2 для випадку коли б обмотка послідовного збудження
була б не зашунтована й зреверсована.
93
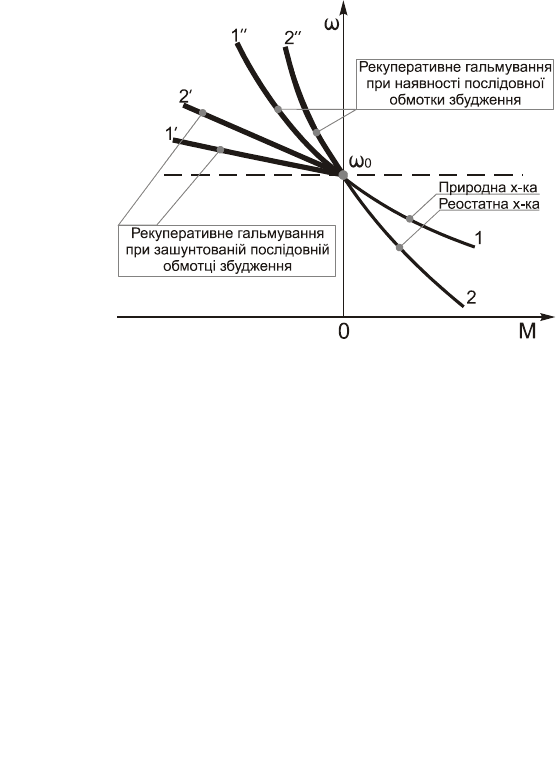
Рисунок 3.25 – Характеристики рекуперативного
гальмування.
3.9.2 Гальмування противвімкненням суттєво не
відрізняється від таких ДПС, що раніш розглядались. Наприклад
при активному статичному моменті опору й великих значеннях
додаткового опору у якірному колі
яд
R
під дією потенціального
момента (якщо статичний момент стане більше момента, що
розвиває двигун) переходить у режим гальмування
противвімкненням з активним статичним моментом, рисунок
3.26. Характеристики розташовані у 4-му квадранті, як і раніш, з
ростом опору якірного кола жорсткість характеристик падає (
4321 ядядядяд
RRRR
), характеристики нелінійні. Нелінійність
пояснюється, як і раніше, впливом м.р.с. обмотки ПЗ, яка
змінюється, за рахунок зміни величини струму навантаження.
94
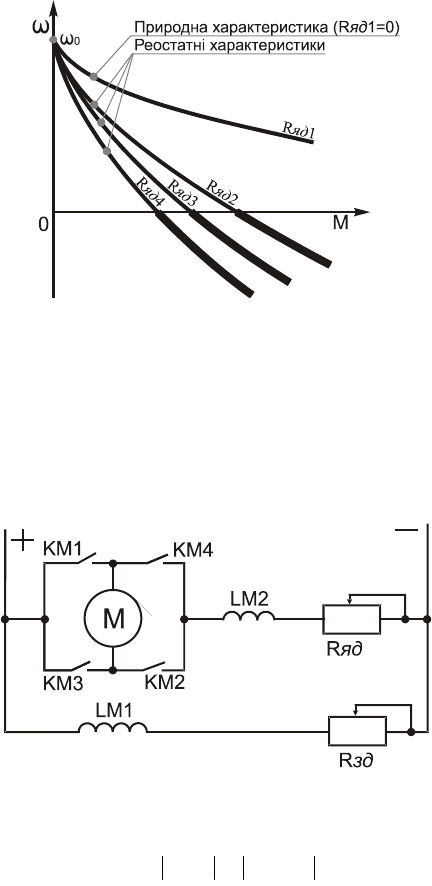
Рисунок 3.26 – Характеристики гальмування.
Для реалізації гальмівного режиму противвімкнення при
реактивному статичному моменті (накопичена кінетична
енергія) реверсується струм якоря й уводиться додатковий опір
резистором
яд
R
якірного кола, дивись схему рисунок 3.27.
Рисунок 3.27 – Схема гальмування противвімкненням.
Якщо
ядяд
RR
то
САСА
ММ
. Фізичні процеси, що
при цьому протікають аналогічно раніш розглянутим двигунам,
рисунок 3.28. Механічна характеристика гальмування
противвімкненням розташована у 2-му квадранті й також
нелінійна (як і у попередньому випадку).
95
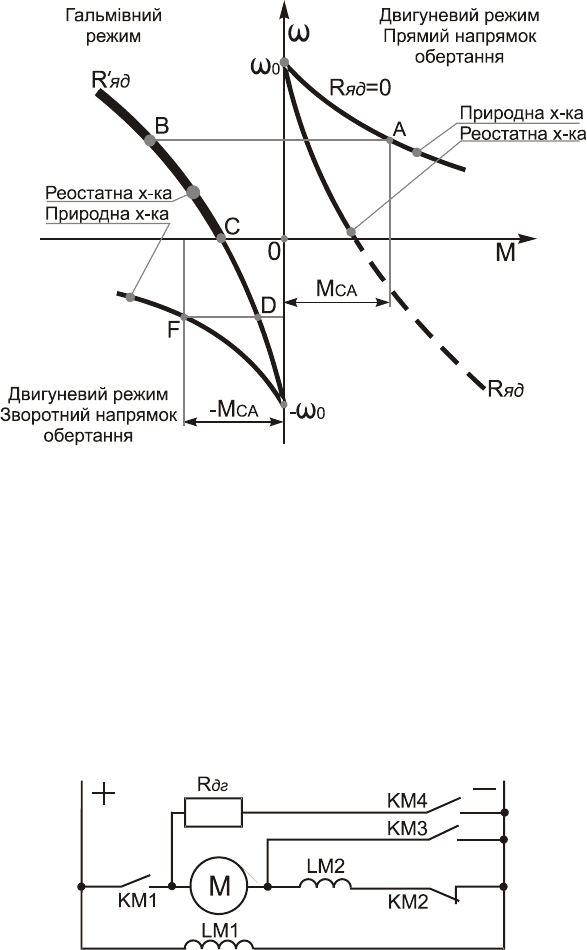
Рисунок 3.28 – Характеристики гальмування.
3.9.3 Динамічне гальмування ДПС МЗ
Динамічне гальмування ДПС МЗ реалізується (у
відповідності до схеми, рисунок 3.29) також двома шляхами:
- при увімкненій обмотці ПЗ;
- при вимкненій обмотці ПЗ.
Рисунок 3.29 – Схема динамічного гальмування.
96
Двигуневий режим: при замкненому контакторі КМ2 й
розімкнених контакторах КМ3 й КМ4 вмикається лінійний
контактор КМ1.
1-й шлях динамічного гальмування при увімкненій
обмотці ПЗ (LM2): лінійний контактор КМ1 розімкнений,
контактор КМ3 також розімкнений, контактори КМ4 й КМ2 –
увімкнені. При цьому обмотка ПЗ буде розмагнічувати машину,
а отже й зменшувати гальмівний момент, якщо при цьому не
зреверсувати струм якоря або струм обмотки ПЗ. Якщо це
виконати, то магнітний потік обмотки ПЗ стане, навпаки
намагнічувальним (відносно потоку обмотки НЗ), гальмівний
момент збільшиться. Але це на практиці не застосовується,
оскільки реверс струму якоря або обмотки ПЗ (додатково до
самої схеми динамічного гальмування) ускладнює схему
гальмування у цілому.
Таким чином має застосування 2-й шлях динамічного
гальмування при вимкненій обмотці ПЗ (рисунок 3.29).
Тут при вимкненому лінійному контакторі КМ1 та
вимкненому контакторі КМ2, вмикаються контактори КМ3 й
КМ4. Тобто ДПС МЗ працює як звичайний ДПС НЗ. Той факт,
що гальмування здійснюється при неповному магнітному потоці
не має суттєвого значення, оскільки ефективність гальмування
може бути підвищена за рахунок зростання струму якоря
шляхом зменшення величини додаткового опору якірного кола.
Характеристики 1 й 2 відповідають динамічному
гальмуванні при наявності струму в обмотці ПЗ, тому вони
нелінійні. Характеристики
1
й
2
відповідають динамічному
гальмуванню без обмотки ПЗ, тобто тільки при наявності
обмотки НЗ, тому вони лінійні (рисунок 3.30).
Таким чином, ДПС МЗ у гальмівних режимах працює
менш ефективно із-за розмагнічувальної дії обмотки ПЗ
відносно магнітного потоку обмотки НЗ. Усунення цього
недоліку зміною полярності струму якоря або обмотки ПЗ при
переході у генераторний режим є недоцільним із-за ускладнення
схеми електричного гальмування.
97
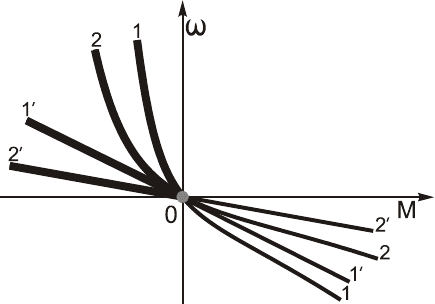
Рисунок 3.30 – Характеристики гальмування.
У реальних умовах ця проблема вирішується просто: у
більшості випадків гальмувань обмотку ПЗ виключають із
процесу гальмування або шунтуючи її, або просто вимикаючи її.
Тоді залишається тільки обмотка НЗ і характеристики ДПС МЗ
стають аналогічними характеристикам ДПС НЗ.
3.10 Статичні механічні характеристики
асинхронних двигунів (АД)
Асинхронні (індукційні) електродвигуни (особливо
трифазні) мають саме широке застосування посеред усіх
електродвигунів. Це обумовлено простотою конструкції,
високою надійністю в експлуатації, порівняно низькою вартістю,
кращими масогабаритними показниками. У нього, наприклад,
витрати активних матеріалів на виготовлення в 1,5 – 2,0 рази
менші ніж у ДПС. Він не має колектора й у багатьох випадках
для його живлення не треба перетворювальних пристроїв – він
безпосередньо живиться від мережі змінного струму
промислової частоти.
98

Асинхронні двигуни, як і ДПС, мають властивість
оборотності (може працювати як у двигуневому, так і у
генераторному режимах), може реалізувати усі три відомі
способи електричного гальмування:
- рекуперативне;
- противвімкнення;
- динамічне.
Кожному з названих режимів відповідають певні межі
зміни ковзання.
Особливо широко розповсюдження набуває зараз
асинхронний регулівний електропривод з векторним керуванням
на базі сучасних статичних перетворювачів з
мікропроцесорними контролерами. Такий привод третього
покоління в Україні створюється в Запоріжжі, Харкові та інших
промислових центрах. Відомі зарубіжні фірми створюють такі
привода, це в першу чергу: SIEMENS, ALAN BRENDLI та інші.
Основним методом аналізу усталених статичних режимів
роботи АД є використання еквівалентних заступних схем.
3.10.1 Заступна схема АД
З огляду на те, що трифазний АД має електричну й
магнітну симетрії фаз, заступні схеми будуються на одну фазу
двигуна зі з’єднанням у подальшому фаз обмоток статора і
ротора у зірку або трикутник (рисунок 3.31).
Найбільш зручна для аналізу роботи АД є так звана Г-
подібна еквівалентна схема з намагнічувальним контуром, що
винесений на затискачі первинного кола (рисунок 3.31, фрагмент
б). За фізичними процесами АД мало відрізняється від
трансформатора, особливо коли АД у режимах з нерухомим
ротором, однак заступна схема трансформатора краща у Т-
подібному вигляді (рисунок 3.31, фрагмент а), ніж Г-подібному.
Це пояснюється тим, що електрична енергія надходить до
трансформатора і виходить із нього
e
W
, а у АД до нього
99
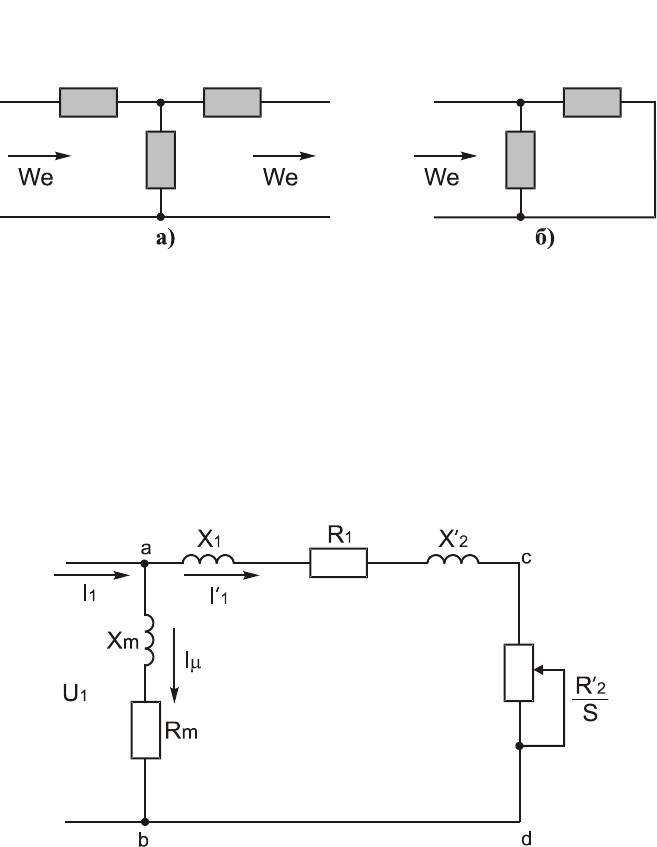
надходить електрична енергія
e
W
й тут же і „вмирає”
(перетворюючись у механічну).
а – „Т”-подібна заступна схема;
б – „Т”- подібна заступна схема.
Рисунок 3.31 – Заступні схеми.
Для одержання аналітичного виразу механічної
характеристики АД з певним наближенням слід скористатися
спрощеною заступною Г-подібною схемою однієї фази АД
(рисунок 3.32).
Рисунок 3.32 – Розрахункова Г-подібна заступна схема.
Ця схема відома із загального курсу електричних машин,
нагадаємо лише деякі особливості.
100