Patrick F. Dunn, Measurement, Data Analysis, and Sensor Fundamentals for Engineering and Science, 2nd Edition
Подождите немного. Документ загружается.

66 Measurement and Data Analysis for Engineering and Science
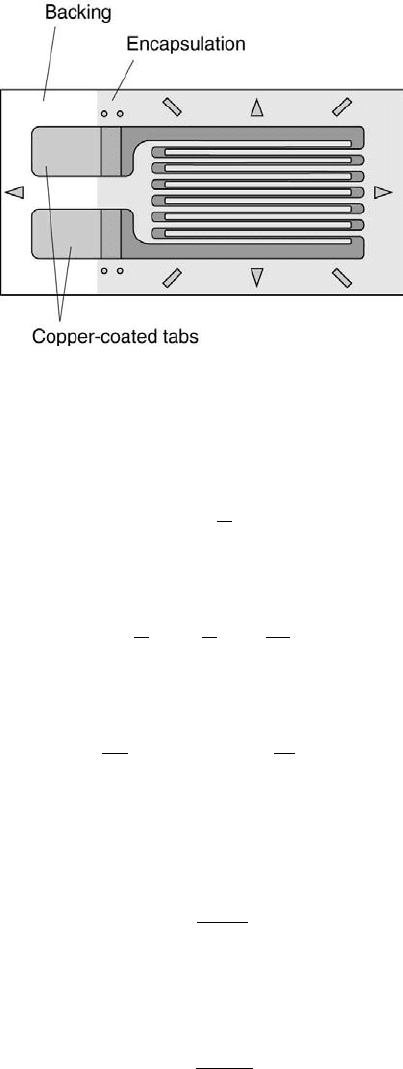
FIGURE 3.3
A strain gage with a typical sensing area of 5 mm × 10 mm.
For a wire, the resistance R can be written as
R = ρ
L
A
, (3.3)
where ρ is the resistivity, L the length, and A the cross-sectional area. Taking
the total derivative of Equation 3.3 yields
dR =
ρ
A
dL +
L
A
dρ −
ρL
A
2
dA. (3.4)
Equation 3.4 can be divided by Equation 3.3 to give the relative change in
resistance,
dR
R
= (1 + 2ν)
L
+
dρ
ρ
. (3.5)
Equation 3.5 shows that the relative resistance change in a wire depends on
the strain of the wire and the resistivity change.
A local gage factor, G
l
, can be defined as the ratio of the relative
resistance change to the relative length change,
G
l
=
dR/R
dL/L
. (3.6)
This expression relates differential changes in resistance and length and
describes a factor that is valid only over a very small range of strain.
An engineering gage factor, can be defined as
G
e
=
∆R/R
∆L/L
. (3.7)
Measurement Systems 67
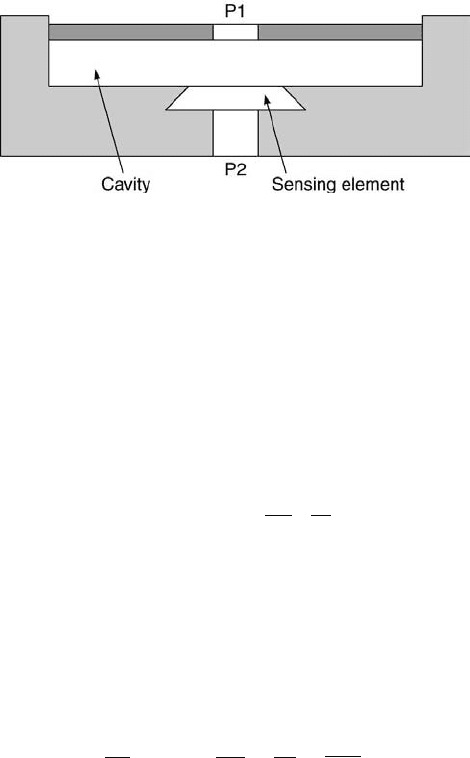
FIGURE 3.4
Schematic of an integrated-silicon pressure sensor.
This expression is based on small, finite changes in resistance and length.
This gage factor is the slope based on the total resistance change throughout
the region of strain investigated. The local gage factor is the instantaneous
slope of a plot of ∆R/R versus ∆L/L. Because it is very difficult to measure
local changes in length and resistance, the engineering gage factor typically
is used more frequently. Equation 3.5 can be rewritten in terms of the engi-
neering gage factor as
G
e
= 1 + 2ν + [
∆ρ
ρ
·
1
L
]. (3.8)
For most metals, ν ≈ 0.3. The last term in brackets represents the strain-
induced changes in the resistivity, which is a piezoresistive effect. This term
is constant for typical strain gages and equals approximately 0.4. Thus, the
value of the engineering gage factor is approximately 2 for most metallic
strain gages.
An alternative expression for the relative change in resistance can be
derived using statistical mechanics where
dR
R
= 2
L
+
dv
0
v
0
−
dλ
λ
−
dN
0
N
0
. (3.9)
Here v
0
is the average number of electrons in the material in motion between
ions, λ is the average distance travelled by an electron between collisions, and
N
0
is the total number of conduction electrons. Equation 3.9 implies that the
differential resistance change and, thus, the gage factor, is independent of
the material properties of the conductor. This also implies that the change
in resistance only will be proportional to the strain when the sum of the
changes on the right hand side of Equation 3.9 is either zero or directly
proportional to the strain. Fortunately, most strain gage materials have this
behavior. So, when a strain gage is used in a circuit such as a Wheatstone
bridge, strain can be converted into a voltage. This system can be used as
a displacement sensor.
68 Measurement and Data Analysis for Engineering and Science
Strain gages also can be mounted on a number of different flexures to
yield various types of sensor systems. One example is four strain gages
mounted on a beam to determine its deflection, as described in Chapter 2.
As force is applied to the beam, it deflects, producing a strain. This strain
is converted into a change in the resistance of a strain gage mounted on the
beam. This is called a force transducer. Another example involves one or
more strain gages mounted on the surface of a diaphragm that separates
two chambers exposed to different pressures. As the diaphragm is deflected
because of a pressure difference between the two chambers, a strain is pro-
duced. The resultant resistance usually is converted into a voltage using a
Wheatstone bridge. This system is called a pressure transducer, although
it actually contains both a sensor (the strain gage) and a transducer (the
Wheatstone bridge). A schematic of a miniature, integrated-silicon pressure
sensor is shown in Figure 3.4. The calibration and use of this type of pres-
sure sensor in a model rocket’s on-board measurement system is presented
in Section 3.7.
An accelerometer uses a strain gage flexure arrangement. An ac-
celerometer in the 1970’s typically contained a small mass that was moved
against a spring as the device containing them was accelerated. The displace-
ment of the mass was calibrated against a known force. This information
then was used to determine the acceleration from the displacement using
Newton’s second law. Accelerometers then used strain gages or piezoelec-
tric transducers instead of a spring, although the size did not change much.
Now micro-accelerometers are available [10]. These contain a very small mass
attached to a silicon cantilever beam that is instrumented with a piezore-
sistor. As the device is accelerated, the beam deflects, the piezoresistor is
deformed, and its resistance changes. The piezoresistor is incorporated into
an on-board Wheatstone bridge circuit which provides a voltage output that
is linearly proportional to acceleration. The entire micro-accelerometer and
associated circuitry is several millimeters in dimension. The calibration and
use of this type of accelerometer in a model rocket’s on-board measurement
system are presented in Section 3.7.
Capacitive Sensor
A capacitive sensor consists of two small conducting plates, each of
area, A, separated by a distance, d, with a dielectric material in between.
The capacitance between the two plates is
C =
o
A/d, (3.10)
where
o
is the permittivity of free space and the relative permittivity.
When used, for example, to measure pressure, the dielectric is air and one
plate is held fixed. As the other plate moves because of the forces acting on
it, the capacitance of the sensor changes. The change in capacitance is pro-
portional to the difference in pressure from the reference pressure measured

Measurement Systems 69
at zero plate deflection. When used in a capacitive Wheatstone bridge cir-
cuit, the pressure difference is converted into a voltage. This system forms a
capacitive pressure transducer. A central plate fixed to a small mass can
be used instead of air between the two capacitor plates. As the mass and its
attached central plate are accelerated, the change in capacitance with re-
spect to time is sensed. This is converted into a voltage that is proportional
to the acceleration. This system constitutes an accelerometer. Another
use of this type of sensor is to expose the dielectric material to moist air
while keeping the distance between the two plates fixed. The permittivity
of the dielectric material changes with relative humidity, which leads to a
change in the sensor’s capacitance. This type of sensor can be used as a
relative humidity sensor.
Optical-based Sensor
An optically based measurement system can be designed to measure
non-invasively the velocity and velocity fluctuations of a transparent fluid
over the velocity range from ∼1 cm/s to ∼500 m/s with ∼1 % accuracy.
This system is known as the laser Doppler velocimeter (LDV) and op-
erates on the principle of the Doppler effect [9]. A coherent beam of laser
light of a given frequency is directed into the moving fluid containing mi-
croparticles (∼1 µm diameter), which ideally follow the flow. Because these
microparticles are moving with respect to the beam, the frequency of light
as received by the microparticles is Doppler shifted. A photodetector in the
same reference frame as the laser receives the light that is scattered from
the microparticles. This scattered light is frequency shifted once again at
the receiver. The frequency of the scattered light, however, is too high to be
detected using conventional detectors.
This limitation can be overcome by using two beams of equal fre-
quency, intensity, and diameter, and crossing the beams inside the flow.
This produces an ellipsoidal measurement volume with sub-millimeter di-
mensions. This method is called the dual-beam or Doppler frequency dif-
ference method. The crossed beams produce an ellipsoidal measurement
volume, on the order of 0.5 to 1 mm in length and 0.1 to 0.3 mm in diam-
eter. The velocity component, U , of the flow perpendicular to the bisector
of the incident beams separated by an angle, θ, is related to the Doppler
frequency difference, f
D
, by
U =
λf
D
2 sin(θ/2)
, (3.11)
where λ is the wavelength of the incident laser light. The Doppler frequency
difference is the difference between the frequencies of the two scattered light
beams, as received in the laboratory reference frame. Further modifications
can be made by adding other beams of different frequencies in different
Cartesian coordinate directions to yield all three components of the velocity.
Also, frequency shifting usually is employed to compensate for insensitivity
70 Measurement and Data Analysis for Engineering and Science
of Equation 3.11 to flow direction. If two additional, equal-spaced detectors
are added, the phase lag between the signals of the three detectors is re-
lated to the diameter of the microparticle passing through the measurement
volume. This system is called a phase Doppler anemometer.
3.3.3 *Sensor Scaling
Sensors have evolved considerably since the beginning of scientific instru-
ments. Marked changes have occurred in the last 300 years. The tempera-
ture sensor serves as a good example. Daniel Gabriel Fahrenheit (1686-1736)
produced the first mercury-in-glass thermometer in 1714 with a calibrated
scale based upon the freezing point of a certain ice/salt mixture, the freezing
point of water, and body temperature. This device was accurate to within
several degrees and was approximately the length scale of 10 cm. In 1821,
Thomas Johann Seebeck (1770-1831) found that by joining two dissimilar
metals at both ends to form a circuit, with each of the two junctions held
at a different temperature, a magnetic field was present around the circuit.
This eventually led to the development of the thermocouple. Until very re-
cently, the typical thermocouple circuit consisted of two dissimilar metals
joined at each end, with one junction held at a fixed temperature (usually
the freezing point of distilled water contained within a thermally insulated
flask) and the other at the unknown temperature. A potentiometer was used
to measure the mV-level emf. Presently, because of the advance in micro-
circuit design, the entire reference temperature junction is replaced by an
electronic one and contained with an amplifier and linearizer on one small
chip. Such chips even are being integrated with other micro-electronics and
thermocouples such that they can be located in a remote environment and
have the temperature signal transmitted digitally with very low noise to a
receiving station. The simple temperature sensor has come a long way since
1700.
Sensor development has advanced rapidly since 1990 because of MEMS
(microelectromechanical system) sensor technology [2]. The basic nature of
sensors has not changed, although their size and applications have changed.
Sensors, however, simply cannot be scaled down in size and still operate ef-
fectively. Scaling laws for micro-devices, such as those proposed by W.S.N.
Trimmer in 1987, must be followed in their design [10]. As sensor sizes
are reduced to millimeter and micrometer dimensions, their sensitivities to
physical parameters can change. This is because some effects scale with the
sensor’s physical dimension. For example, the surface-to-volume ratio of a
transducer with a characteristic dimension, L, scales as L
−1
. So, surface
area-active micro-sensors become more advantageous to use as their size is
decreased. On the other hand, the power loss-to-onboard power scales as
L
−2
. So, as an actuator that carries its own power supply becomes smaller,
power losses dominate, and the actuator becomes ineffective. Further, as
sensors are made with smaller and smaller amounts of material, the prop-
Measurement Systems 71
erties of the material may not be isotropic. A sensor having an output that
is related to its property values may be less accurate as its size is reduced.
For example, the temperature determined from the change in resistance of
a miniature resistive element is related to the coefficients of thermal expan-
sion of the material. If property values change with size reduction, further
error will be introduced if macro-scale coefficient values are used.
The scaling of most sensor design variables with length is summarized
in Table 3.5. This can be used to examine the scaling of some conventional
sensors. Consider the laminar flow element, which is used to determine a liq-
uid flow rate. The element basically consists of many parallel tubes through
which the bulk flow is subdivided to achieve laminar flow through each tube.
The flow rate, Q, is related to the pressure difference, ∆p, measured between
two stations separated by a distance, L, as
Q = C
o
πD
4
∆p
128µL
, (3.12)
where D is the internal diameter of the pipe containing the flow tubes, µ
the absolute viscosity of the fluid, and C
o
the flow coefficient of the element.
What happens if this device is reduced in size by a factor of 10 in both length
and diameter? According to Equation 3.12, assuming C
o
is constant, for the
same Q, a ∆p 1000 times greater is required! Likewise, to maintain the same
∆p, Q must be reduced by a factor of 1000. The latter is most likely the
case. Thus, a MEMs-scale laminar flow element is limited to operating with
flow rates that are much smaller than a conventional laminar flow element.
Example Problem 3.2
Statement: Equation 3.12 is valid for a single tube when C
o
= 1, where it reduces
to the Hagen-Poiseuille law. How does the pressure gradient scale with a reduction in
the tube’s diameter if the same velocity is maintained?
Solution: The velocity, U , is the flow rate divided by the tube’s cross-sectional area,
U = 4Q/(πD
2
), where D is the tube diameter. Thus, Equation 3.12 can be written
∆p/L = 32µU D
−2
. This implies that the pressure gradient increases by a factor of 100
as the tube diameter is reduced by a factor of 10. Clearly, this presents a problem in
sensors using micro-capillaries under these conditions. This situation necessitates the
development of other means to move liquids in micro-scale sensors, such as piezoelectric
and electrophoretic methods.
Decisions on the choice of a micro-sensor or micro-actuator are not based
exclusively on length-scaling arguments. Other factors may be more appro-
priate. This is illustrated by the following example.
Example Problem 3.3
Statement: Most conventional actuators use electromagnetic forces. Are either elec-
tromagnetic or electrostatic actuators better for micro-actuators based upon force-
scaling arguments?
72 Measurement and Data Analysis for Engineering and Science
Solution: Using Table 3.5, the electrostatic force scales as L
2
and the electromag-
netic force as L
4
. So, a reduction in L by a factor of 100 leads to a reduction in the
electrostatic force by a factor of 1 × 10
4
and in the electromagnetic force by a factor of
1 × 10
8
! If these forces are comparable at the conventional scale, then the electrostatic
force is 10 000 times larger than the electromagnetic force at this reduced scale.
The final choice of which type of micro-actuator to use, however, may be based
upon other considerations. For example, Madou [11] argues that energy density also
could be the factor upon which to scale. Energy densities several orders of magnitude
higher can be achieved using electromagnetics as compared to electrostatics, primarily
because of limitations in electrostatic energy density. This could yield higher forces
using electromagnetics as compared to electrostatics for comparable micro-volumes.
3.4 Amplifiers
An amplifier is an electronic component that scales the magnitude of an
input analog signal, E
i
(t), producing an output analog signal, E
o
(t). In
general, E
o
(t) = f {E
i
(t)}. For a linear amplifier f {E
i
(t)} = GE
i
(t); for
a logarithmic amplifier f {E
i
(t)} = G log
x
[E
i
(t)], where G is the gain of
the amplifier. Amplifiers are often used to increase the output signal of a
transducer to a level that utilizes the full-scale range of an A/D converter
that is between the transducer and the board. This minimizes errors that
arise when converting a signal from analog to digital format.
The common-mode rejection ratio (CMRR) is another characteristic
of amplifiers. It is defined as
CMRR = 20 log
10
G
d
G
c
, (3.13)
in which G
d
is the gain when different voltages are applied across the am-
plifier’s positive and negative input terminals, and G
c
is the gain when the
same voltages are applied. Ideally, when two signals of the same voltage
containing similar levels of noise are applied to the inputs of an amplifier,
its output should be zero. Realistically, however, the amplifier’s output for
this case is not zero, but rather it is some finite value. This implies that the
amplifier effectively has gained the signal difference by a factor of G
c
, when,
ideally, it should have been zero. Thus, the lower G
c
is, and, consequently,
the higher the CMRR is, the better it is. Typically, CMRR values greater
than 100 are considered high and desirable for most applications.
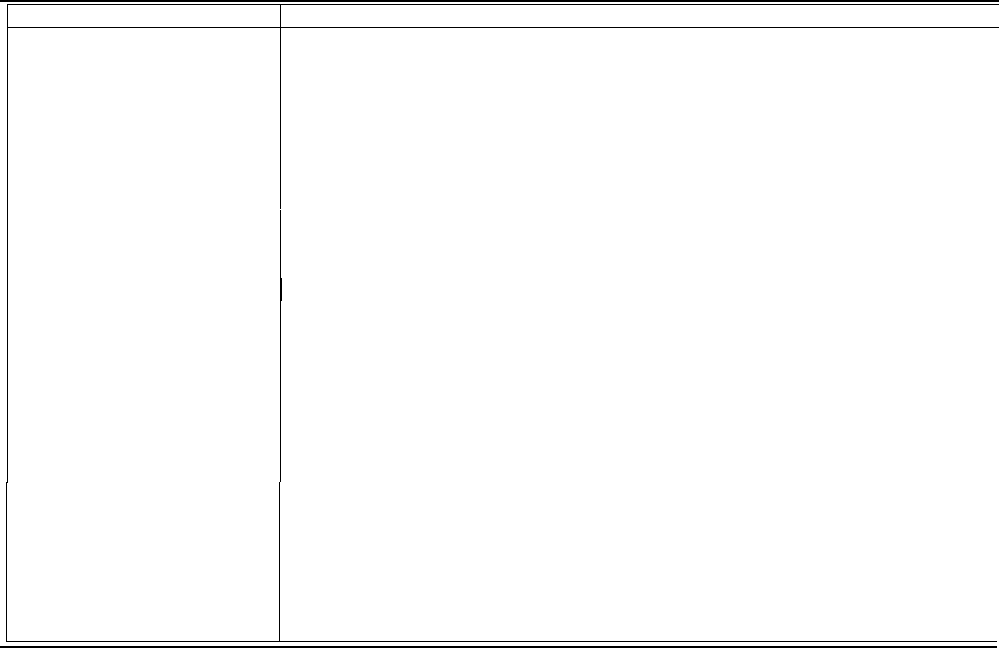
Today, almost all amplifiers used in common measurement systems are
operational amplifiers. An op amp is comprised of many transistors, resis-
tors, and capacitors in the form of an integrated circuit. For example, the
LM124 series op amp, whose schematic diagram is shown in Figure 3.6,
consists of 13 transistors, 2 resistors, 1 capacitor, and 4 current sources.
Variable
Equivalent
displacement
distance
strain
length change/length
strain rate or shear rate
strain change/time
velocity
distance/time
surface
width × length
volume
width × length × height
force
mass × acceleration
line force
force/length
surface force
force/area
body force
force/volume
work, energy
force × distance
power
energy/time
power density
power/volume
electric current
charge/time
electric resistance
resistivity × length/cross-sectional area
electric field potential
voltage
electric field strength
voltage/length
electric field energy
permittivity × electric field strength
2
resistive power loss
voltage
2
/resistance
electric capacitance
permittivity × plate area/plate spacing
electric inductance
voltage/change of current in time
electric potential energy
capacitance × voltage
2
electrostatic potential energy
capacitance × voltage
2
with V ∼ L
electrostatic force
electrostatic potential energy change/distance
electromagnetic force
electromagnetic potential energy change/distance
flow rate
velocity × cross-sectional area
pressure gradient
surface force/area/length
FIGURE 3.5
Variable scaling with length, L.
74 Measurement and Data Analysis for Engineering and Science
FIGURE 3.6
Internal layout of a low cost FET operational amplifier (National Semicon-
ductor Corporation LM124 series).
FIGURE 3.7
An operational amplifier in an open-loop configuration.
When used in an open-loop configuration, as shown in Figure 3.7, the
output is not connected externally to the input. It is, of course, connected
through the internal components of the op amp. For the open-loop config-
uration, E
o
(t) = A [E
i2
(t) − E
i1
(t) − V
o
], where V
o
is the op amp’s offset
voltage, which typically is zero. E
i1
is called the inverting input and E
i2
the non-inverting input. Because A is so large, this configuration is used
primarily in situations to measure very small differences between the two
inputs, when E
i2
(t)
∼
=
E
i1
(t).
The op amp’s major attributes are as follows:
• Very high input impedance (> 10
7
Ω)
• Very low output impedance (< 100 Ω)
• High internal open-loop gain (∼ 10
5
to 10
6
)
These attributes make the op amp an ideal amplifier. Because the input
impedance is very high, very little current is drawn from the input circuits.
Also, negligible current flows between the inputs. The high internal open-
loop gain assures that the voltage difference between the inputs is zero. The

Measurement Systems 75
FIGURE 3.8
An operational amplifier in a closed-loop configuration.
very low output impedance implies that the output voltage is independent
of the output current.
When used in the closed-loop configuration, as depicted in Figure 3.8,
the output is connected externally to the input. That is, a feedback loop is
established between the output and the input. The exact relation between
E
o
(t) and E
i1
(t) and E
i2
(t) depends upon the specific feedback configura-
tion.
Op amps typically can be treated as black boxes when incorporating
them into a measurement system. Many circuit design handbooks provide
equations relating an op amp’s output to its input for a specified task. This
can be a simple task such as inverting and gaining the input signal (the
inverting configuration), not inverting but gaining the input signal (the non-
inverting configuration), or simply passing the signal through it with unity
gain (the voltage-follower configuration). An op amp used in the voltage-
follower configuration serves as an impedance converter. When connected
to the output of a device, the op amp effectively provides a very low out-
put impedance to the device-op amp system. This approach minimizes the
loading errors introduced by impedance mismatching that are described in
Chapter 2. Op amps also can be used to add or subtract two inputs or to
integrate or differentiate an input with respect to time, as well as many
more complex tasks. The six most common op amp configurations and their
input-output relations are presented in Figure 3.9.
Example Problem 3.4
Statement: Derive the expression given for the input-output relation of the differ-
ential amplifier shown in Figure 3.9.
Solution: Let node A denote that which connects R
1
and R
2
at the op amp’s
positive input and node B that which connects R
1
and R
2
at the op amp’s negative
input. Essentially no current passes through the op amp because of its very high input
impedance. Application of Kirchhoff’s first law at node A gives
E
i2
− E
A
R
1
=
E
A
− 0
R
2
.