Patrick F. Dunn, Measurement, Data Analysis, and Sensor Fundamentals for Engineering and Science, 2nd Edition
Подождите немного. Документ загружается.

96 Measurement and Data Analysis for Engineering and Science
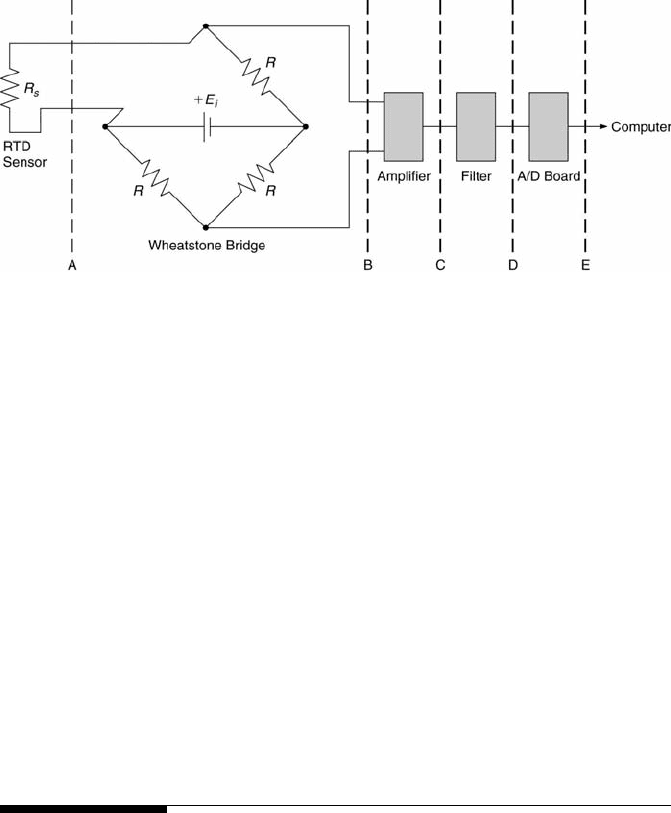
FIGURE 3.25
An example temperature measurement system configuration.
5. A single-stage, low-pass RC filter with a resistance of 93 Ω is designed
to have a cut-off frequency of 50 Hz. Determine the capacitance of the
filter in units of µF.
6. Two resistors, R
A
and R
B
, arranged in parallel, serve as the resistance,
R
1
, in the leg of a Wheatstone bridge where R
2
= R
3
= R
4
= 200 Ω
and the excitation voltage is 5.0 V. If R
A
= 1000 Ω, what value of R
B
is required to give a bridge output of 1.0 V?
7. The number of bits of a 0 V-to-5 V A/D board having a quantization
error of 0.61 mV is (a) 4, (b) 8, (c) 12, (d) 16, or (e) 20.
8. Determine the output voltage, in V, of a Wheatstone bridge having
resistors with resistances of 100 Ω and an input voltage of 5 V.
3.10 Homework Problems
1. Consider the amplifier between stations B and C of the temperature
measurement system shown in Figure 3.25. (a) Determine the minimum
input impedance of the amplifier (in Ω) required to keep the amplifier’s
voltage measurement loading error, e
V
, less than 1 mV for the case when
the bridge’s output impedance equals 30 Ω and its output voltage equals
0.2 V. (b) Based upon the answer in part (a), if an operational amplifier
were used, would it satisfy the requirement of e
V
less than 1 mV (Hint:
Compare the input impedance obtained in part (a) to that of a typical
operational amplifier)? Answer yes or no and explain why or why not.
Measurement Systems 97
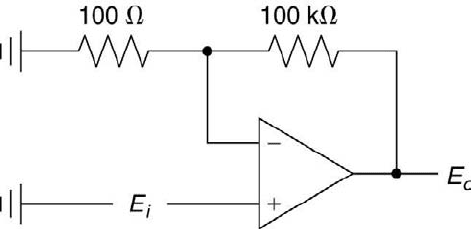
FIGURE 3.26
A closed-loop operational amplifier configuration.
(c) What would be the gain, G, required to have the amplifier’s output
equal to 9 V when T = 72
◦
F?
2. Consider the A/D board between stations D and E of the temperature
measurement system shown in Figure 3.25. Determine how many bits
(M = 4, 8, 12, or 16) would be required to have less than ±0.5 % quan-
tization error for the input voltage of 9 V with E
F SR
= 10 V.
3. The voltage from a 0 kg-to-5 kg strain gage balance scale has a corre-
sponding output voltage range of 0 V to 3.50 mV. The signal is recorded
using a new 16 bit A/D converter having a unipolar range of 0 V to 10 V,
with the resulting weight displayed on a computer screen. An intelligent
aerospace engineering student decides to place an amplifier between the
strain gage balance output and the A/D converter such that 1 % of the
balance’s full scale output will be equal to the resolution of 1 bit of the
converter. Determine (a) the resolution (in mV/bit) of the converter and
(b) the gain of the amplifier.
4. The operational amplifier shown in Figure 3.26 has an open-loop gain
of 10
5
and an output resistance of 50 Ω. Determine the effective output
resistance (in Ω) of the op amp for the given configuration.
5. A single-stage, passive, low-pass (RC) filter is designed to have a cut-
off frequency, f
c
, of 100 Hz. Its resistance equals 100 Ω. Determine the
filter’s (a) magnitude ratio at f = 1 kHz, (b) time constant (in ms), and
(c) capacitance (in µF).
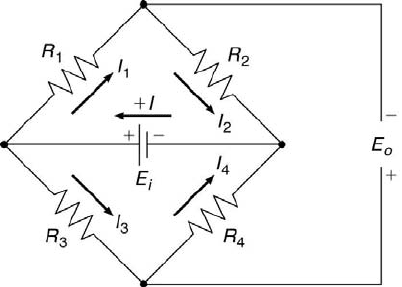
6. A voltage-sensitive Wheatstone bridge (refer to Figure 3.27) is used in
conjunction with a hot-wire sensor to measure the temperature within
a jet of hot gas. The resistance of the sensor (in Ω) is R
1
= R
o
[1 +
α(T − T
o
)], where R
o
= 50 Ω is the resistance at T
o
= 0
◦
C and α =
0.00395/
◦
C. For E
i
= 10 V and R
3
= R
4
= 500 Ω, determine (a) the
value of R
2
(in Ω) required to balance the bridge at T = 0
◦
C. Using
98 Measurement and Data Analysis for Engineering and Science
FIGURE 3.27
The Wheatstone bridge configuration.
this as a fixed R
2
resistance, further determine (b) the value of R
1
(in
Ω) at T = 50
◦
C, and (c) the value of E
o
(in V) at T = 50
◦
C. Next, a
voltmeter having an input impedance of 1000 Ω is connected across the
bridge to measure E
o
. Determine (d) the percentage loading error in the
measured bridge output voltage. Finally, (e) state what other electrical
component, and in what specific configuration, could be added between
the bridge and the voltmeter to reduce the loading error to a negligible
value.
7. An engineer is asked to specify several components of a temperature
measurement system. The output voltages from a Type J thermocouple
referenced to 0
◦
C vary linearly from 2.585 mV to 3.649 mV over the
temperature range from 50
◦
C to 70
◦
C. The thermocouple output is to
be connected directly to an A/D converter having a range from −5 V to
+5 V. For both a 12-bit and a 16-bit A/D converter determine (a) the
quantization error (in mV), (b) the percentage error at T = 50
◦
C, and
(c) the percentage error at T = 70
◦
C. Now if an amplifier is installed
in between the thermocouple and the A/D converter, determine (d) the
amplifier’s gain to yield a quantization error of 5 % or less.
8. Consider the filter between stations C and D of the temperature mea-
surement system shown in Figure 3.25. Assume that the temperature
varies in time with frequencies as high as 15 Hz. For this condition,
determine (a) the filter’s cut-off frequency (in Hz) and (b) the filter’s
time constant (in ms). Next, find (c) the filter’s output voltage (peak-
to-peak) when the amplifier’s output voltage (peak-to-peak) is 8 V and
the temperature varies with a frequency of 10 Hz and (d) the signal’s
phase lag through the filter (in ms) for this condition.
Measurement Systems 99
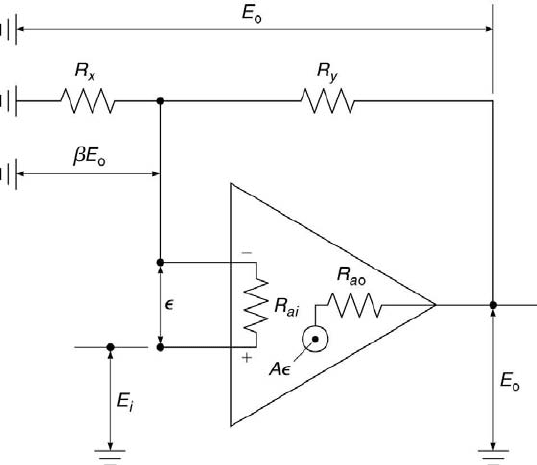
FIGURE 3.28
The operational amplifier in the voltage-follower configuration.
9. An op amp in the negative-feedback, voltage-follower configuration is
shown in Figure 3.28. In this configuration, a voltage difference, , be-
tween the op amp’s positive and negative inputs results in a voltage
output of A, where A is the open-loop gain. The op amp’s input and
output impedances are R
ai
and R
ao
, respectively. E
i
is its input volt-
age and E
o
its output voltage. Assuming that there is negligible current
flow into the negative input, determine (a) the value of β, and (b) the
closed-loop gain, G, in terms of β and A. Finally, recognizing that A is
very large (∼ 10
5
to 10
6
), (c) derive an expression for E
o
as a function
of E
i
, R
x
, and R
y
.
10. Refer to the information given previously for the configuration shown in
Figure 3.28. When E
i
is applied to the op amp’s positive input, a current
I
in
flows through the input resistance, R
ai
. The op amp’s effective input
resistance, R
ci
, which is the resistance that would be measured between
the op amp’s positive and negative inputs by an ideal ohmmeter, is
defined as E
i
/I
in
. (a) Derive an expression for R
ci
as a function of R
ai
,
β, and A. Using this expression, (b) show that this is a very high value.
11. Refer to the information given previously for the configuration shown in
Figure 3.28. The op amp’s output voltage for this configuration is E
o
=
A(E
i
−βE
o
). Now assume that there is a load connected to the op amp’s
100 Measurement and Data Analysis for Engineering and Science
output that results in a current flow, I
out
, across the op amp’s output
resistance, R
ao
. This effectively reduces the op amp’s output voltage by
I
out
R
ao
. For the equivalent circuit, the Th´evenin output voltage is E
o
,
as given in the above expression, and the Th´evenin output impedance
is R
co
. (a) Derive an expression for R
co
as a function of R
ao
, β, and A.
Using this expression, (b) show that this is a very low value.
12. A standard RC circuit might be used as a low-pass filter. If the out-
put voltage is to be attenuated 3 dB at 100 Hz, what should the time
constant, τ, be of the RC circuit to accomplish this?
13. Design an op amp circuit such that the output voltage, E
o
, is the sum
of two different input voltages, E
1
and E
2
.
14. A pitot-static tube is used in a wind tunnel to determine the tunnel’s
flow velocity, as shown in Figure 3.18. Determine the following: (a) the
flow velocity (in m/s) if the measured pressure difference equals 58 Pa,
(b) the value of R
x
(in Ω) to have E
o
= 0 V, assuming R = 100 Ω and
R
s
= 200 Ω at a zero flow velocity, with E
i
= 5.0 V, (c) the value of E
o
(in V) at the highest flow velocity, at which the parallel combination of
R
x
and R
s
increases by 20 %, (d) the amplifier gain to achieve 80 % of
the full-scale range of the A/D board at the highest flow velocity, (e) the
values of the resistances if the amplifier is a non-inverting operational
amplifier, and (f) the number of bits of the A/D board such that there is
less than 0.2 % error in the voltage reading at the highest flow velocity.
15. A force-balance system comprised of a cantilever beam with four strain
gages has output voltages of 0 mV for 0 N and 3.06 mV for 10 N. The
signal is recorded using a 16-bit A/D converter having a unipolar range
of 0 V to 10 V, with the resulting voltage being displayed on a computer
monitor. A student decides to modify the system to get better force
resolution by installing an amplifier between the force-balance output
and the A/D converter such that 0.2 % of the balance’s output for 10 N
of force will be equal to the resolution of 1 bit of the converter. Determine
(a) the resolution (in mV/bit) of the converter, (b) the gain that the
amplifier must have in the modified system, and (c) the force (in N) that
corresponds to a 5 V reading displayed on the monitor when using the
modified system.

Bibliography
[1] R.M. White. 1987. A Sensor Classification Scheme. IEEE Transactions
on Ultrasonics, Ferroelectrics and Frequency Control UFFC-34: 124-126.
[2] G.T.A. Kovacs. 1998. Micromachined Transducers Sourcebook. New York:
McGraw-Hill.
[3] J.P. Bentley. 1988. Principles of Measurement Systems. 2nd ed. New
York: John Wiley and Sons.
[4] Wheeler, A.J. and A.R. Ganji. 2004. Introduction to Engineering Exper-
imentation. 2nd ed. New York: Prentice Hall.
[5] E. Doebelin. 2003. Measurement Systems: Application and Design. 5th
ed. New York: McGraw-Hill.
[6] Beckwith, T.G., Marangoni, R.D. and J.H. Leinhard V. 1993. Mechanical
Measurements. 5th ed. New York: Addison-Wesley.
[7] Figliola, R. and D. Beasley. 2000. Theory and Design for Mechanical
Measurements. 3rd ed. New York: John Wiley and Sons.
[8] Alciatore, D.G. and M.B. Histand. 2003. Introduction to Mechatronics
and Measurement Systems. 2nd ed. New York: McGraw-Hill.
[9] Crowe, C., Sommerfeld, M. and Y. Tsuji. 1998. Multiphase Flows with
Droplets and Particles. New York: CRC Press.
[10] T-R. Hsu. 2002. MEMS & Microsystems: Design and Manufacture. New
York: McGraw-Hill.
[11] M. Madou. 1997. Fundamentals of Microfabrication. New York: CRC
Press.
[12] T. Crump, T. 2001. A Brief History of Science as Seen Through the
Development of Scientific Instruments. London: Robinson.
[13] Horowitz, P. and W. Hill, W. 1989. The Art of Electronics. 2nd ed. Cam-
bridge: Cambridge University Press.
[14] Oppenheim, A.V. and A.S. Willsky. 1997. Signals and Systems. 2nd ed.
New York: Prentice Hall.
101
102 Measurement and Data Analysis for Engineering and Science
[15] T.S. Szarek. 2003. On The Use Of Microcontrollers For Data Acquisi-
tion In An Introductory Measurments Course. M.S. Thesis. Department
of Aerospace and Mechanical Engineering. Indiana: University of Notre
Dame.

4
Calibration and Response
CONTENTS
4.1 Chapter Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
4.2 Static Response Characterization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.3 Dynamic Response Characterization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.4 Zero-Order System Dynamic Response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4.5 First-Order System Dynamic Response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
4.5.1 Response to Step-Input Forcing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
4.5.2 Response to Sinusoidal-Input Forcing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
4.6 Second-Order System Dynamic Response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
4.6.1 Response to Step-Input Forcing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
4.6.2 Response to Sinusoidal-Input Forcing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
4.7 Higher-Order System Dynamic Response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
4.8 *Numerical Solution Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
4.9 Problem Topic Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
4.10 Review Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
4.11 Homework Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
A single number has more genuine and permanent value than an expensive
library full of hypotheses.
Robert J. Mayer, c. 1840.
Measures are more than a creation of society, they create society.
Ken Alder. 2002. The Measure of All Things. London: Little, Brown.
It is easier to get two philosophers to agree than two clocks.
Lucius Annaeus Seneca, c. 40.
4.1 Chapter Overview
In this chapter, the performance of a measurement system is investigated.
Calibration methods are presented that assure recorded values are accurate
103

104 Measurement and Data Analysis for Engineering and Science
indicators of the variables sensed. Both the static and the dynamic response
characteristics of linear measurement systems are examined. First-order and
second-order systems are considered in detail, including how their output
can lag in time the changes that occur in the experiment’s environment.
With this information, approaches to data acquisition and signal processing,
which are the subjects of subsequent chapters, then can be considered.
4.2 Static Response Characterization
Measurement systems and their instruments are used in experiments to
obtain measurand values that usually are either steady or varying in time.
For both situations, errors arise in the measurand values simply because
the instruments are not perfect; their outputs do not precisely follow their
inputs. These errors can be quantified through the process of calibration.
In a calibration, a known input value (called the standard) is applied
to the system and then its output is measured. Calibrations can either be
static (not a function of time) or dynamic (both the magnitude and the
frequency of the input signal can be a function of time). Calibrations can be
performed in either sequential or random steps. In a sequential calibration
the input is increased systematically and then decreased. Usually this is
done by starting at the lowest input value and calibrating at every other
input value up to the highest input value. Then the calibration is continued
back down to the lowest input value by covering the alternate input values
that were skipped during the upscale calibration. This helps to identify
any unanticipated variations that could be present during calibration. In a
random calibration, the input is changed from one value to another in no
particular order.
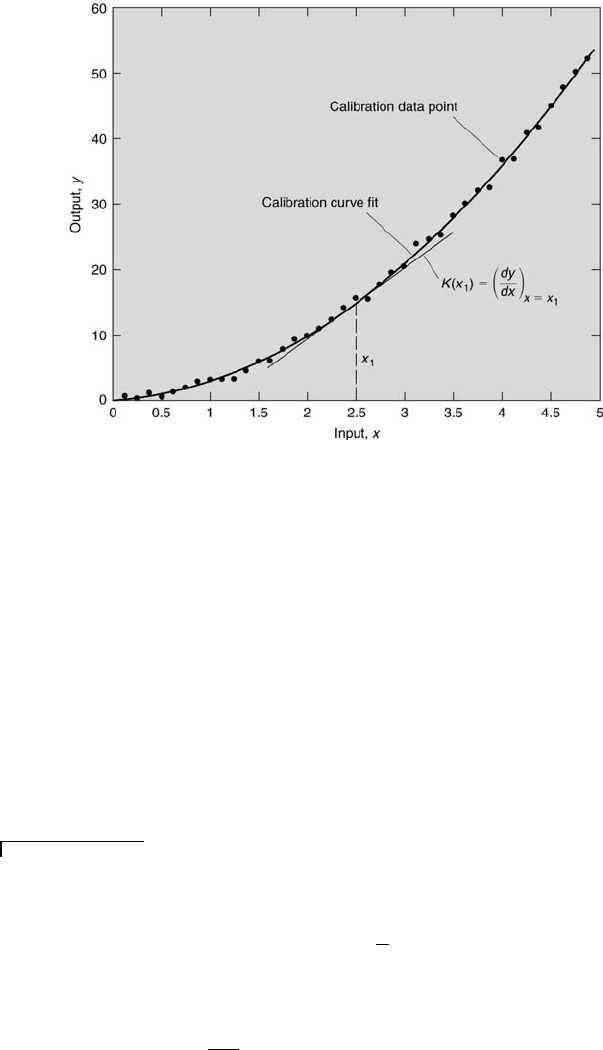
From a calibration experiment, a calibration curve is established. A
generic static calibration curve is shown in Figure 4.1. This curve has several
characteristics. The static sensitivity refers to the slope of the calibration
curve at a particular input value, x
1
. This is denoted by K, where K =
K(x
1
) = (dy/dx)
x=x
1
. Unless the curve is linear, K will not be a constant.
More generally, sensitivity refers to the smallest change in a quantity that
an instrument can detect, which can be determined knowing the value of K
and the smallest indicated output of the instrument. There are two ranges
of the calibration, the input range, x
max
− x
min
, and the output range,
y
max
− y
min
.
Calibration accuracy refers to how close the measured value of a calibra-
tion is to the true value. Typically, this is quantified through the absolute
error, e
abs
, where
e
abs
= |true value − indicated value|. (4.1)
Calibration and Response 105
FIGURE 4.1
Typical static calibration curve.
The relative error, e
rel
, is
e
rel
= e
abs
/|true value|. (4.2)
The accuracy of the calibration, a
cal
, is related to the absolute error by
a
cal
= 1 − e
rel
. (4.3)
Calibration precision refers to how well a particular value is indicated
upon repeated but independent applications of a specific input value. An
expression for the precision in a measurement and the uncertainties that
arise during calibration are presented in Chapter 7.
Example Problem 4.1
Statement: A hot-wire anemometer system was calibrated in a wind tunnel using a
pitot-static tube. The data obtained is presented in Table 4.1. Using this data, a linear
calibration curve-fit was made, which yielded
E
2
= 10.2 + 3.28
√
U.
Determine the following for the curve-fit: [a] the sensitivity, [b] the maximum absolute
error, [c] the maximum relative error, and [d] the accuracy at the point of maximum
relative error.
Solution: Because the curve-fit is linear, the sensitivity of the curve-fit is its slope,
which equals 3.284 V
2
/
p
m/s. The calculated voltages, E
c
, from the curve-fit expres-
sion are given in Table 4.1. Inspection of the results reveals that the maximum difference