Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление
Подождите немного. Документ загружается.

2.3. Обратная связь по выходу. Наблюдаемость 51
Заметим, что V
T
.
= [C
T
A
T
C
T
. . . (A
T
)
n−1
C
T
] — матрица управляемости для систе-
мы ˙x = A
T
x+C
T
u, y = B
T
x, которая называется двойственной к системе ˙x = Ax+ Bu,
y = Cx, поскольку управляемость одной из них эквивалентна наблюдаемости другой.
Необходимые и достаточные условия наблюдаемости, аналогичные сформулированным
в Теореме 1, получаются заменой A → A
T
, B → C
T
.
Доказательство. Необходимость. Пусть rank V < n. Тогда найдется вектор v ∈ R
n
,
v 6= 0, такой, что Cv = CAv = . . . = CA
n−1
v = 0. Как и при доказательстве необходи-
мости в Теореме 1 об управляемости отсюда следует, что CA
m
v = 0 для всех m ≥ 0 и,
следовательно, Ce
Aτ
v ≡ 0. Поэтому при x(0) = v имеем
y(t) = Cx(t) = Ce
At
v ≡ 0.
С другой стороны, при x(0) = 0 также имеем y(t) ≡ 0. Таким образом, разным началь-
ным условиям отвечают одинаковые выходы, и система ненаблюдаема.
Достаточность. Имеем
y(t) = Cx(t), ˙y(t) = CAx(t), . . . , y
(n−1)
(t) = CA
n−1
x(t),
т.е. Y = V x, где Y =
³
y(t), ˙y(t), . . . , y
(n−1)
(t)
´
∈ R
nl
, x = x(t). Эта линейная система
имеет решение, если выход y(t) порожден системой (2.11) в силу установленной выше
связи x(t) и производных выхода, и это решение единственно, так как ранг V равен n.
Способ оценивания состояния, вытекающий из приведенного выше доказательства
Теоремы 3 о наблюдаемости, неудовлетворителен — он требует вычисления n − 1 про-
изводных от выхода. Меньшим числом производных обойтись нельзя, если выход ска-
лярный; конечно, если размерность l выхода больше, то число требуемых производных
можно уменьшить (например, если матрица C квадратная невырожденная, то можно
просто взять x(t) = C
−1
y(t)). Поэтому для оценивания состояний используют другой
подход, не требующий вычисления производных. Он основан на построении наблю-
дателя, т.е. оценки
b
x вектора состояния, описываемой линейным дифференциальным
уравнением, в которое входит рассогласование выхода y и его прогноза
b
y
.
= C
b
x:
˙
b
x(t) = A
b
x + F (y − C
b
x).
Здесь F — некоторая матрица размера n × l, которую можно выбирать.
Возвращаясь к задаче при наличии управления
˙x = Ax + Bu
y = Cx,
возьмем наблюдатель в форме
˙
b
x(t) = A
b
x + Bu + F (y −C
b
x).
Тогда, очевидным образом, невязка e(t)
.
= x(t) −
b
x(t) описывается линейным диффе-
ренциальным уравнением
˙e = (A − F C)e.

52 Глава 2. Виды управления
Мы покажем в дальнейшем, что можно так выбрать матрицу F , что его решение e(t) →
0 при t → ∞ для любого начального рассогласования e(0). Иными словами, получим
b
x(t) → x(t), и оценка
b
x(t) может использоваться для построения обратной связи u = K
b
x.
Анализ таких алгоритмов будет проведен позже, в разделе 4.3.
Сопутствующие функции Matlab:
obsv (CST) — построение матрицы наблюдаемости.
2.4 Частотные методы
Предыдущие разделы данной главы были посвящены выбору управления при описа-
нии систем в пространстве состояний; обсудим теперь эти вопросы на языке передаточ-
ных функций. Начнем со случая одномерных непрерывных систем. Запишем уравнение
системы в виде
P (s)y = Q(s)u + R(s)w,
где P (s), Q(s), R(s) — полиномы от оператора дифференцирования s:
P (s) = p
0
+ p
1
s + . . . + p
n
s
n
,
Q(s) = q
0
+ q
1
s + . . . + q
m
s
m
,
R(s) = r
0
+ r
1
s + . . . + r
l
s
l
,
l ≤ n, m ≤ n (т.е. выполнены условия реализуемости), а скалярные функции y(t), u(t),
w(t) имеют смысл выхода, управления и внешнего входа, соответственно. Напомним,
что такая запись эквивалентна (1.11):
y = H
yu
(s)u + H
yw
(s)w, (2.12)
где H
yu
(s), H
yw
(s) — передаточные функции
H
yu
(s) =
Q(s)
P (s)
, H
yw
(s) =
R(s)
P (s)
,
а также записи в виде одного дифференциального уравнения
p
n
y
(n)
+ . . . + p
0
y = q
m
u
(m)
+ . . . + q
0
u + r
l
w
(l)
+ . . . + r
0
w
в предположении, что u(t) и w(t) дифференцируемы соответственно m и l раз.
Выбор управления в форме обратной связи означает, что оно ищется в виде
u = −
N(s)
D(s)
y
.
= −C(s)y, (2.13)
где N(s), D(s) — полиномы
N(s) = n
0
+ n
1
s + . . . + n
α
s
α
,
D(s) = d
0
+ d
1
s + . . . + d
β
s
β
, β ≥ α,
2.4. Частотные методы 53
а C(s) — передаточная функция регулятора. Подставляя это соотношение в (2.12), мы
получаем связь входа и выхода в замкнутой системе:
y = H
c
(s)w, H
c
(s) =
H
yw
(s)
1 + H
yu
(s)C(s)
=
R(s)D(s)
Q(s)N(s) + P (s)D(s)
. (2.14)
Таким образом, характеристический полином P
c
(s) замкнутой системы равен
P
c
(s) = Q(s)N(s) + P (s)D(s),
а ее передаточная функция H
c
(s) легко определяется по передаточным функциям разо-
мкнутой системы и регулятора. Здесь мы еще раз убеждаемся в удобстве языка пере-
даточных функций при таких операциях как замыкание системы с помощью обратной
связи.
-
w
N
-
-
G(s)
-
y
¾
C(s)
6
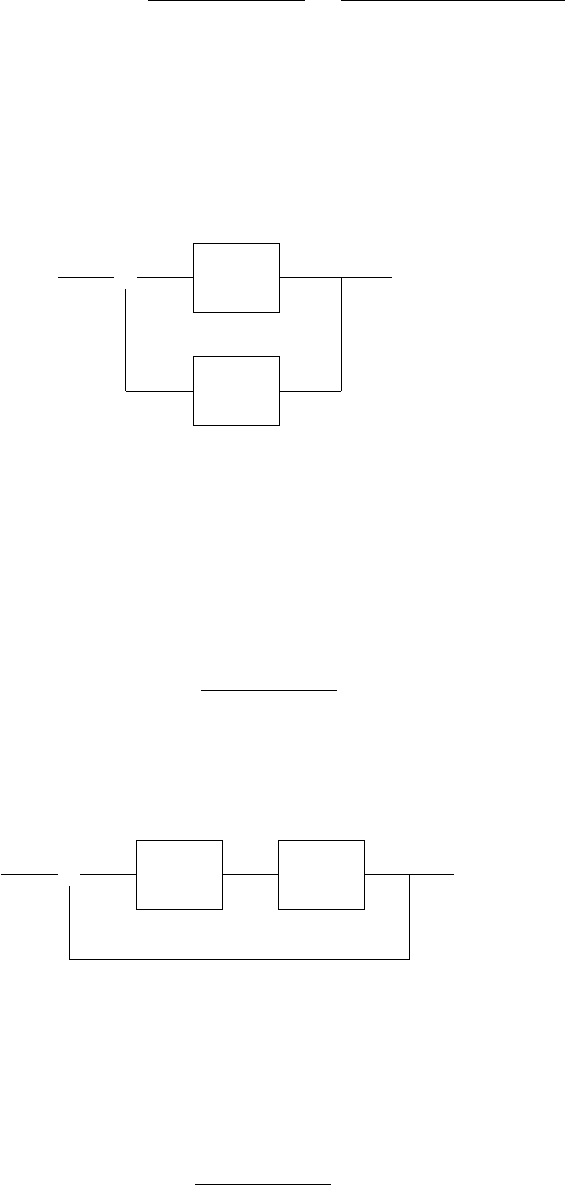
Рис. 2.1: Блок-схема замкнутой системы.
Замкнутую систему можно записывать в виде блок-схемы, изображенной на рис. 2.1,
где G(s) и C(s) — передаточные функции объекта и регулятора, значок
N
обозначает
суммирующее устройство, а знак “−” соответствует минусу в формуле (2.13) (отрица-
тельная обратная связь). Таким образом, передаточная функция замкнутой системы
объект-регулятор равна
H
c
(s) =
G(s)
1 + G(s)C(s)
. (2.15)
Такого рода язык блок-схем очень нагляден и широко распространен в инженерной
практике.
Чаще используется конфигурация системы, изображенная на рис. 2.2 (она рассмат-
ривается при исследовании качества системы, в робастной теории и т.д.), где входной
-
w
N
-
-
e
C(s)
-
u
G(s)
-
y
6
Рис. 2.2: Блок-схема замкнутой системы.
сигнал w имеет смысл задающего воздействия, C и G — передаточные функции регу-
лятора и объекта, а u — выход регулятора — имеет смысл управления. В этой конфи-
гурации передаточная функция замкнутой системы (от w к y) равна
T (s) =
G(s)C(s)
1 + G(s) C(s)
, (2.16)
54 Глава 2. Виды управления
а предаточная функция от w к невязке e
.
= w − y называется чувствительностью:
S(s) =
1
1 + G(s)C(s)
. (2.17)
Происхождение этого термина следующее. Пусть ∆G — возмущение передаточной функ-
ции объекта, и ∆G/G — относительное возмущение; соответственно, ∆T — вызываемое
им возмущение передаточной функции T замкнутой системы, и ∆T/T — относительное
возмущение. Величина
lim
∆G→0
∆T/T
∆G/G
характеризует чувствительность передаточной функции замкнутой системы к бесконеч-
но малым возмущениям передаточной функции объекта. Рассматривая T как функцию
от G, получаем, что эта величина равна S. Поскольку S(s) + T(s) = 1, то T (s) также
называют дополнительной чувствительностью.
Функция 1 + G(s)C(s), стоящая в знаменателе (2.15), называется возвратной разно-
стью. Позже мы увидим, что основные свойства замкнутой системы (в частности, ее
устойчивость) формулируются в виде условий на возвратную разность или на обратную
к ней величину — чувствительность.
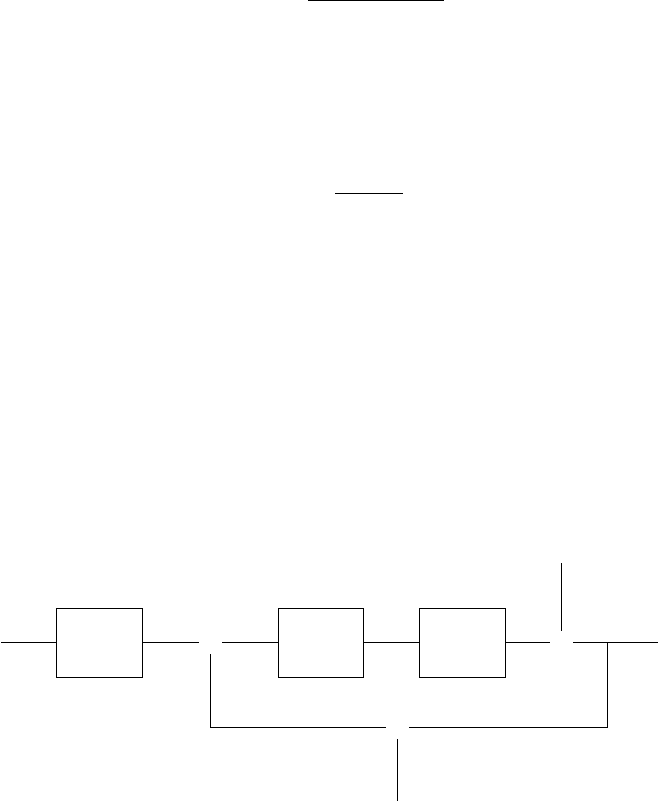
Конфигурация на рис. 2.2 является простейшей. Существует много других блок-
схем, описывющих системы с обратной связью. Значительно более полная конфигура-
ция показана на рис. 2.3. В ней регулирование объекта G осуществляется с помощью
-
r
K(s)
-
N
-
-
e
C(s)
-
u
G(s)
-
N
?
w
-
y
¾
N
6
v
6
Рис. 2.3: Блок-схема замкнутой системы с двумя степенями свободы.
префильтра (иначе, корректирующего фильтра) K и регулятора C, поэтому приме-
няется термин система с двумя степенями свободы (в отличие от системы с одной
степенью свободы на рис. 2.2). На систему воздействует задающее воздействие r(t),
внешние возмущения w(t) и ошибки измерения v(t). Для выходного сигнала y(t) такой
системы нетрудно получить следующее выражение:
y = S(s)w + R(s)r − T (s)v, (2.18)
где S(s) и T (s) — чувствительность и дополнительная чувствительность, описываемые
теми же формулами (2.17) и (2.16), а передаточная функция от r к y равна
R(s) = K(s)T (s).
2.4. Частотные методы 55
Если мы хотим, чтобы влияние возмущения w на выход было мало (так называе-
мая задача подавления внешних возмущений), то из (2.18) видно, что для этого нужна
малость S в том или ином смысле (более точные постановки таких задач будут рас-
смотрены ниже). Аналогичным образом, чтобы ошибки измерения v мало влияли на
выход (задача фильтрации ошибок измерения), нужна малость T . Обе эти задачи не
могут быть решены одновременно, так как
S(s) + T (s) = 1 (2.19)
при всех s. Обычный компромисс заключается в том, что эти задачи рассматриваются
на разных частотных интервалах, т.е. S(jω) должно быть мало для малых ω, а T (jω)
— для больших ω.
Все вышеприведенные выкладки были достаточно формальными. Чтобы придать им
корректность, нужно чтобы получаемые передаточные функции удовлетворяли усло-
вию реализуемости (см. раздел 1.2), т.е. чтобы степень полинома в числителе не превос-
ходила степени знаменателя. На первый взгляд кажется, что это условие выполняется
в силу реализуемости передаточных функций объекта. Например, в знаменателе (2.14)
содержится член PD, а в числителе — RD; поскольку l = deg R ≤ deg P = n, то
deg R D ≤ deg P D. Однако может оказаться, что старшие коэффициенты у слагаемых
QN и P D в знаменателе (2.14) имеют разные знаки, старшие члены сокращаются, и
условие реализуемости нарушается. Поэтому надо наложить дополнительные требова-
ния во избежание подобного сокращения.
Лемма 2 Если в (2.14)
1 + H
yu
(∞)C(∞) 6= 0, (2.20)
или в (2.15)
1 + G(∞)C(∞) 6= 0, (2.21)
то соответствующие передаточные функции (2.14) или (2.15) — реализуемые.
Эти условия часто называют корректностью замкнутой системы.
Отметим теперь, какие особенности возникают при переходе к многомерным си-
стемам. В этом случае передаточные функции являются матричными, а сигналы —
векторными (раздел 1.2). Имея это в виду, мы можем рассматривать те же блок-схемы
на рис. 2.1, 2.2, 2.3. При этом, разумеется, (2.15) и последующие формулы требуют мо-
дификации (хотя бы потому, что деление на матрицу не имеет смысла, а перемножение
матриц некоммутативно). Из блок-схемы на рис. 2.2 имеем
y = G(s)C(s)e, e = w −y.
Исключая отсюда e или y и рассматривая получающуюся систему линейных уравнений,
находим
y = (I + GC)
−1
GCw
.
= T w,
e = (I + GC)
−1
w
.
= Sw.

56 Глава 2. Виды управления
Матричные функции
S(s) =
³
I + G(s)C(s)
´
−1
, (2.22)
T (s) =
³
I + G(s)C(s)
´
−1
G(s)C(s) (2.23)
по-прежнему носят название чувствительности и дополнительной чувствительности;
они являются передаточными функциями от входа w к невязке e и от входа w к выхо-
ду y, соответственно. По-прежнему верно и соотношение, обобщающее (2.19):
S(s) + T (s) = I.
Аналогичным образом вводятся передаточные функции многомерной системы, со-
ответствующей рис. 2.3. Требование реализуемости (Лемма 2) передаточных матриц
приобретает следующую форму: матрица
I + G(∞)C(∞)
должна быть обратимой, — это есть условие корректности для многомерной системы.
Наконец, заметим, что критерии управляемости и наблюдаемости тесно связаны
с понятием минимальной реализации многомерных передаточных функций (см. раз-
дел 1.2). Справедлив следующий результат.
Теорема 4 Реализация
H(s) =
"
A B
C D
#
минимальна тогда и только тогда, когда пара (A, B) управляема, а пара (A, C) на-
блюдаема.
Сопутствующие функции Matlab.
tf (CST) — задание системы с помощью передаточных функций и переход от других
форм записи к передаточной функции;
minreal (CST) — построение минимальной реализации передаточной функции.
2.5 Выводы
• Если в системе
˙x = Ax + Bu
управление ищется как функция от времени: u = u(t), то говорят о программном
управлении. Система управляема, если для любых двух состояний x
0
и x
1
найдет-
ся управление, переводящее ее из x
0
в x
1
за (произвольное) конечное время T .
Критерий управляемости: ранг матрицы управляемости U = [B AB . . . A
n−1
B]
равен n (Теорема 1). Программное управление применимо при полной информа-
ции о матрицах A, B, C и отсутствии внешних возмущений.
2.5. Выводы 57
• Если управление не выбирается заранее, а строится как функция от текущего
состояния системы, то говорят об управлении в форме обратной связи по состо-
янию. Рассматриваем статическую линейную обратную связь
u = Kx,
в которой K ∈ R
m×n
— матрица усиления. Управления такого вида называются
линейными регуляторами; матрица замкнутой системы приобретает вид A
c
=
A + BK.
• Если в системе
˙x = Ax + Bu,
y = Cx
измерению доступны лишь выходы, но не состояния, то можно искать управление
в форме обратной связи по выходу. Так как статическая обратная связь u = Ky
как правило не приводит к успеху, то регулятор ищут в форме динамической
обратной связи
u = K
b
x,
использующей оценку
b
x вектора состояний по наблюдаемому выходу системы; эта
оценка описывается уравнением наблюдателя
˙
b
x = (A + BK)
b
x + F (y − C
b
x).
Такой подход приемлем лишь если система обладает свойством наблюдаемости:
разным траекториям x(t) 6≡ x
0
(t) соответствуют разные выходы y(t) 6≡ y
0
(t), что
позволяет восстановить состояние по выходу. Критерий наблюдаемости: ранг мат-
рицы наблюдаемости
V
.
=
C
CA
.
.
.
CA
n−1
∈ R
ln×n
равен n (Теорема 3).
• Если одномерная система записана с помощью передаточных функций
y =
Q(s)
P (s)
u +
R(s)
P (s)
w, deg P ≥ deg Q, deg P ≥ deg R,
где P, Q, R — полиномы, то управление в форме обратной связи ищется как
u =
N(s)
D(s)
= −C(s)y,
где N(s), D(s) — полиномы, а C(s) — передаточная функция регулятора. При
таком управлении передаточная функция замкнутой системы рис. 2.1 имеет вид
H(s) =
G(s)
1 + G(s)C(s)
,

58 Глава 2. Виды управления
а ее характеристический полином равен Q(s)N(s) + P (s)D(s). В конфигурации
рис. 2.2 передаточная функция от внешнего входа w к невязке e называется чув-
ствительностью:
S(s) =
1
1 + G(s)C(s)
,
а от входа к выходу y — дополнительной чувствительностью:
T (s) =
G(s)C(s)
1 + G(s)C(s)
,
при этом функция 1 + G(s)C(s) называется возвратной разностью.
Если конфигурация рис. 2.2 отвечает многомерной системе, то чувствительность
и дополнительная чувствительность — матричные передаточные функции
S(s) =
³
I + G(s)C(s)
´
−1
, T (s) =
³
I + G(s)C(s)
´
−1
G(s)C(s).
• Для обеспечения реализуемости передаточных функций замкнутой системы на-
кладывается условие корректности (Лемма 2):
1 + G(∞)C(∞) 6= 0;
в многомерном случае оно приобретает следующую форму: матрица I+G(∞)C(∞)
должна быть обратимой.
• Одна из наиболее полных конфигураций, описывающих системы с обратной свя-
зью приведена на рис. 2.3. Это — система с двумя степенями свободы (соответ-
ствующими префильтру (или корректирующему фильтру) K и регулятору C).
Выходной сигнал y(t) такой системы выражается через внешнее возмущение w(t),
задающее воздействие r(t) и ошибки измерения v(t):
y = S(s)w + R(s)r − T (s)v,
где
S(s) =
1
1 + G(s) C(s)
, T (s) =
G(s)C(s)
1 + G(s)C(s)
, R(s) = K(s)T (s).
Поскольку
S(s) + T (s) = 1
при всех s, то невозможно одновременное решение задачи подавления внешних
возмущений (малость влияния возмущения w на выход) и задачи фильтрации
ошибок измерения (малость влияния ошибки измерения v на выход). Поэтому
обычно эти задачи решаются на разных частотных интервалах: S(jω) минимизи-
руется для малых ω, а T (jω) — для больших ω.
• Связь управляемости и наблюдаемости с понятием минимальной реализации мно-
гомерных передаточных функций дается Теоремой 4: реализация H(s) = (A, B, C, D)
минимальна тогда и только тогда, когда пара (A, B) управляема, а пара (A, C) на-
блюдаема.
Глава 3
Устойчивость
В этой главе исследуется важнейшее понятие теории управления — понятие устой-
чивости. Приводятся различные критерии устойчивости — как алгебраические, так и
графические.
Для нелинейных нестационарных систем имеется множество определений устойчи-
вости: устойчивость точки равновесия и устойчивость движения; устойчивость по Ля-
пунову и асимптотическая устойчивость; устойчивость “в малом” и “в большом”; устой-
чивость по начальным условиям и по возмущению. Для линейных стационарных систем
все эти определения совпадают, и мы будем говорить просто об устойчивости.
3.1 Устойчивость линейных непрерывных систем
Начнем с простейшей ситуации — открытой невозмущенной системы в пространстве
состояний.
3.1.1 Невозмущенные системы
Линейная непрерывная система
˙x = Ax, x(t) ∈ R
n
, (3.1)
где A — матрица n × n, не зависящая от t, называется устойчивой, если x(t) → 0 при
t → ∞ для любого x(0).
Теорема 5 Для устойчивости системы (3.1) необходимо и достаточно, чтобы все
собственные значения λ
i
матрицы A лежали в левой полуплоскости:
Re λ
i
< 0, i = 1, . . . , n. (3.2)
При этом для всякого 0 < ν < σ
.
= min
i
{−Re λ
i
} существует такое C = C(A, ν), что
|x(t)| ≤ C|x(0)|e
−νt
. (3.3)
59
60 Глава 3. Устойчивость
Отметим, что матрица A, удовлетворяющая условиям (3.2), в дальнейшем называ-
ется гурвицевой или устойчивой. Соответственно, собственное значение с отрицатель-
ной вещественной частью также будем называть устойчивым. Если A устойчива, то
величина σ
.
= min
i
{−Re λ
i
(A)} называется степенью устойчивости (матрицы или со-
ответствующей системы), т.е. это минимальное из расстояний от собственных значений
устойчивой матрицы до мнимой оси.
Доказательство. Необходимость. Пусть условие (3.2) не выполнено, т.е. найдется
некоторое собственное значение матрицы A, например, λ
1
, такое что
Re λ
1
≥ 0.
Если λ
1
вещественно, то возьмем x(0) = e
1
, где Ae
1
= λ
1
e
1
, e
1
— вещественный вектор
и |e
1
| = 1. Тогда решение с таким начальным условием имеет вид x(t) = e
λ
1
t
e
1
, и
потому x(t) 6→ 0 при t → ∞. Если λ
1
— комплексное число λ
1
= u + jv, то найдется
и сопряженное собственное значение λ
2
= λ
∗
1
= u − jv, причем если e
1
= g + jh —
собственный вектор, отвечающий λ
1
: Ae
1
= λ
1
e
1
, |g|
2
+ |h|
2
= 1, то e
2
= g − jh —
собственный вектор, отвечающий λ
2
: Ae
2
= λ
2
e
2
. При этом Ag = ug −vh, Ah = vg + uh.
Возьмем x(0) = α
0
g + β
0
h, где α
0
, β
0
∈ R
1
, тогда x(t) остается в том же двумерном
подпространстве: x(t) = α(t)g + β(t)h, где α(t), β(t) описываются дифференциальным
уравнением
˙α = uα + vβ, α(0) = α
0
,
˙
β = −vα + uβ, β(0) = β
0
.
Обозначая ρ(t)
.
= α
2
(t) + β
2
(t), отсюда легко получаем ˙ρ = 2uρ, т.е. ρ(t) 6→ 0 при t → ∞
и u ≥ 0.
Достаточность. В силу важности теоремы дадим несколько доказательств доста-
точности; каждое использует технику, которая неоднократно будет применяться в даль-
нейшем. При этом в ряде случаев доказательство не будет исчерпывающе строгим —
для нас важна главным образом идея, заложенная в нем.
Доказательство достаточности 1 (оценка матричной экспоненты). Пусть мат-
рица A диагонализируема (например, все ее собственные значения различны), т.е. су-
ществует такая невырожденная матрица T , что
A = T
−1
ΛT, Λ = diag(λ
1
, . . . , λ
n
).
В этом случае имеем
|x(t)| = |e
T
−1
ΛT t
x(0)| = |T
−1
e
Λt
T x(0)| ≤ kT
−1
kke
Λt
kkT k|x(0)| = kT
−1
ke
−σt
kT k|x(0)|,
что и доказывает оценку (3.3) для устойчивой матрицы A (в этом случае σ > 0), причем
можно взять ν = σ, а константа C выписывается явно:
C = kT kkT
−1
k.