Расчет и проектирование СБИС. Лекции
Подождите немного. Документ загружается.

последовательно соединенных р-канальных МОП-транзисторов в ячейке ИЛИ-
НЕ должна быть увеличена в большей степени (для того, чтобы их общее
сопротивление было небольшим, а время заряда паразитной емкости С малым),
чем в ячейке И-НЕ.
Логическое проектирование КМОП-схем.
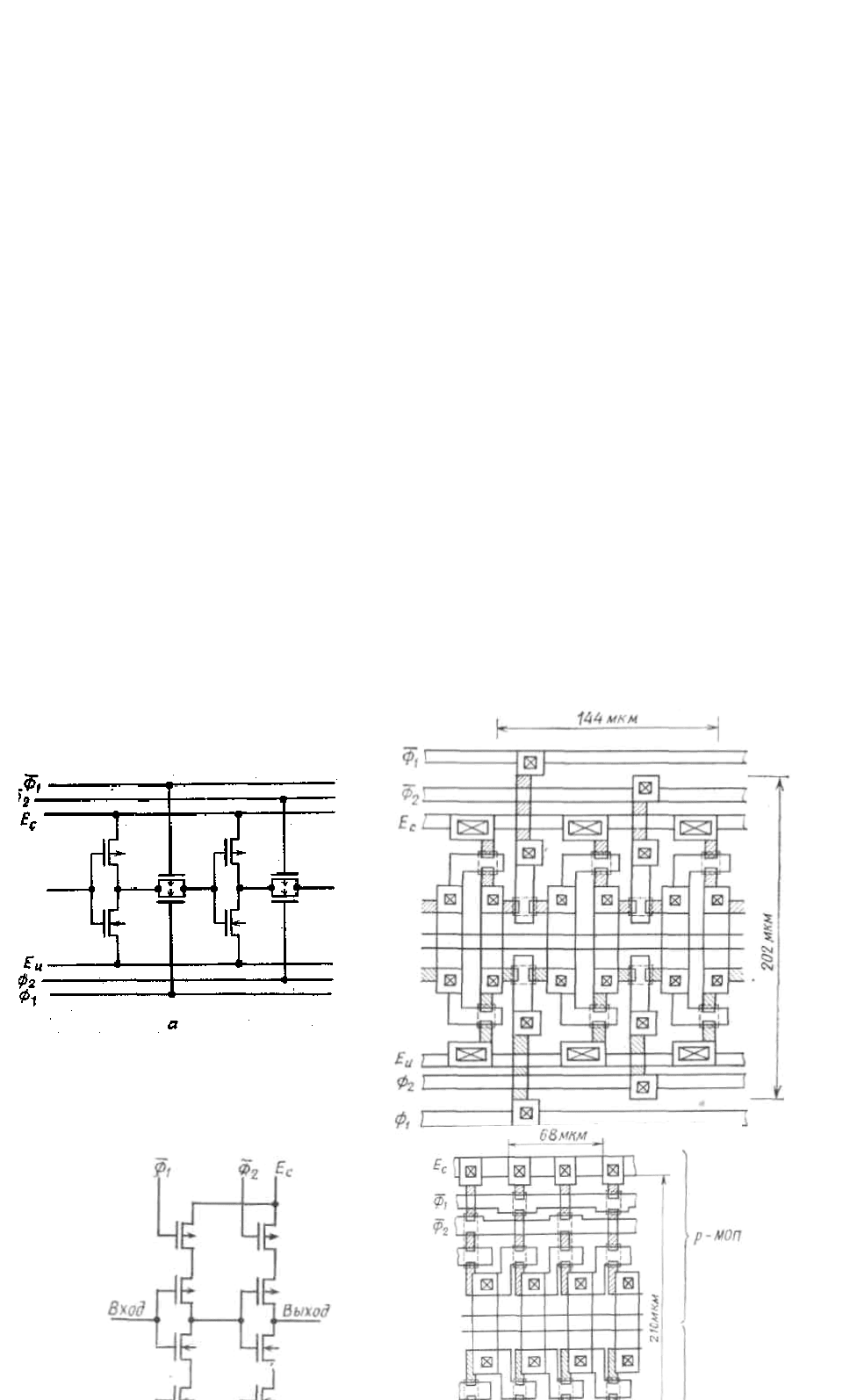
Передаточный вентиль в КМОП-структурах (рис. 4.9.5) является
аналогом передаточного вентиля в n-МОП-структурах часто используется при
проектировании КМОП-схем. Он состоит из р- и n-канального транзисторов,
подложки которых подсоединены к Е
с
я Е
U
соответственно. Управляющее
напряжение d подается на затвор n-канального МОП-транзисторa, а его
инверсное значение d — на затвор р-канального МОП-транзисторa.
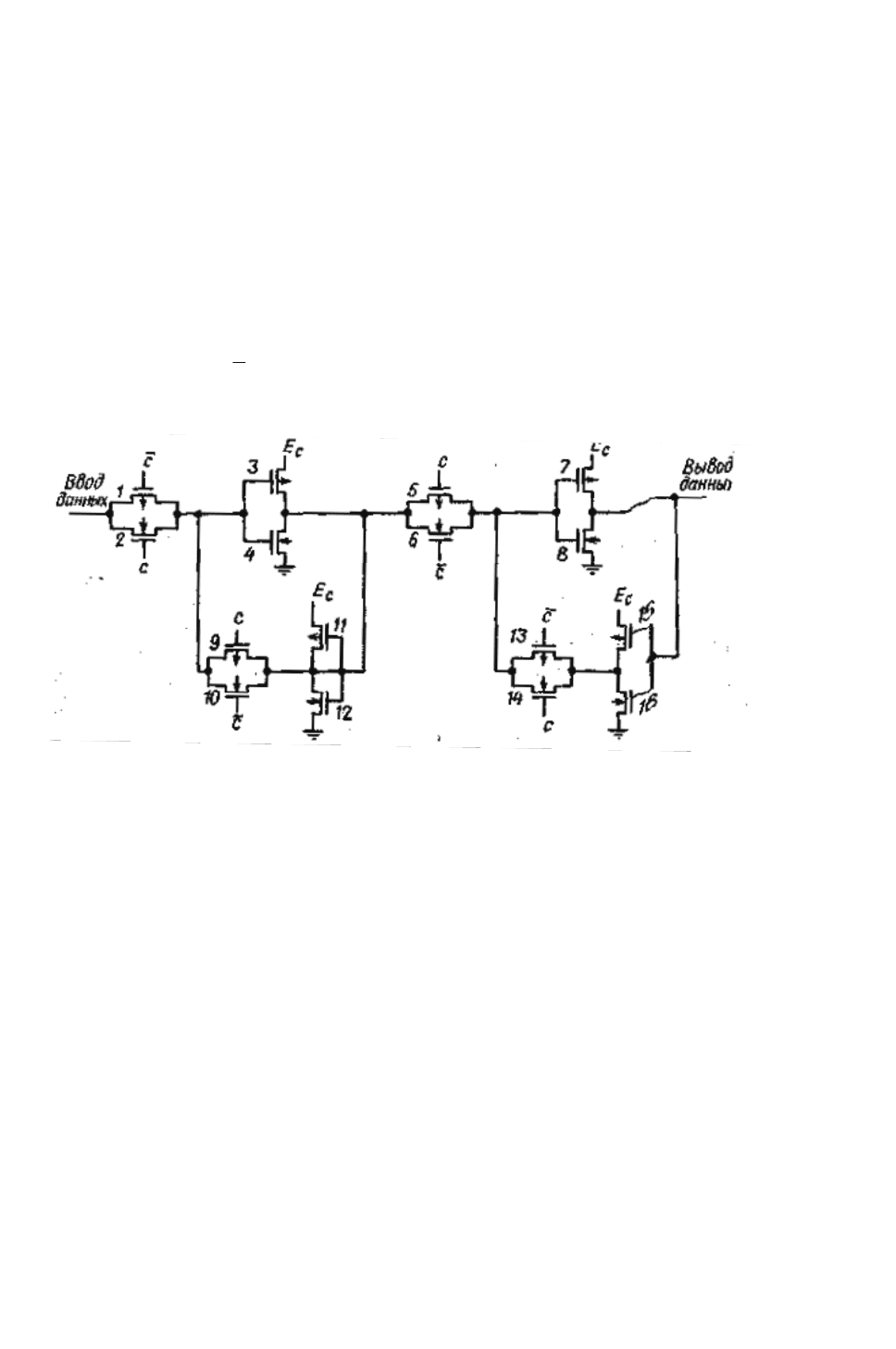
Рис. 4.9.6. Триггер Д-типа.
Если d имеет высокий уровень, оба транзистора открываются, и вход
вентиля соединяется с его выходом. Если d имеет низкий уровень, оба
транзистора закрываются, и выход вентиля отключается от входа. При этом
выходное напряжение на паразитной емкости выхода сохраняется таким, каким
оно было до разъединения. Поскольку вход и выход можно менять местами, пе-
редаточный вентиль является реверсивным устройством. Примером КМОП-
схемы, спроектированной с использованием передаточных вентилей, является
Д-триггер, приведенный на рис. 4.9.6.
Изготовление КМОП-структур
Изготовление ИС КМОП иллюстрирует рис. 4.9.7. При производстве
КМОП требуется большее количество масок, чем при производстве типов ИС,
рассмотренных ранее, так как необходимо изготовить как р-МОП-, так и n-
МОП-транзисторы. Кроме того, площадь ИС КМОП почти в два раза больше,
чем у ИС на р-МОП- или на n-МОП-структурах, так как в каждой ячейке
должны присутствовать и р-МОП- и n-МОП-схемы. Площадь ИС
увеличивается также из-за ограничителей каналов, необходимых для
предотвращения взаимодействия транзисторов из-за образования паразитных
111
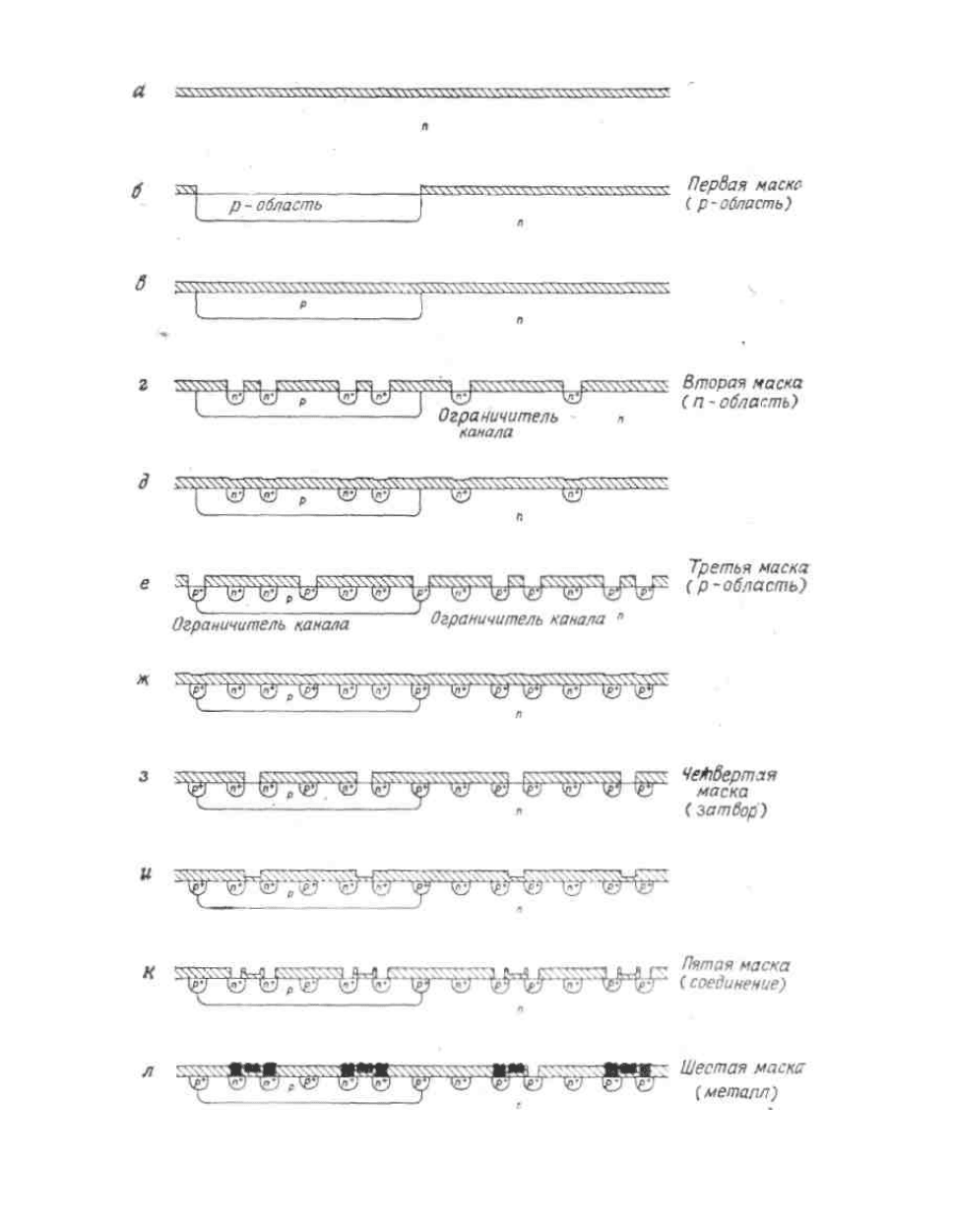
каналов. Ограничители каналов называют также охранными кольцами или
охранными полосами.
Рис. 4.9.7. Изготовление КМОП-структуры.
112
Разновидности КМОП-структур
В рассматриваемых до сих пор КМОП-структурах каждая КМОП-ячейка
представляла собой пару р-МОП- и n-МОП-схем, реализующих двойственные
передаточные функции (рис. 4.9.2). В практике проектирования, однако, часто
используют некоторые разновидности этого принципа организации схем. На
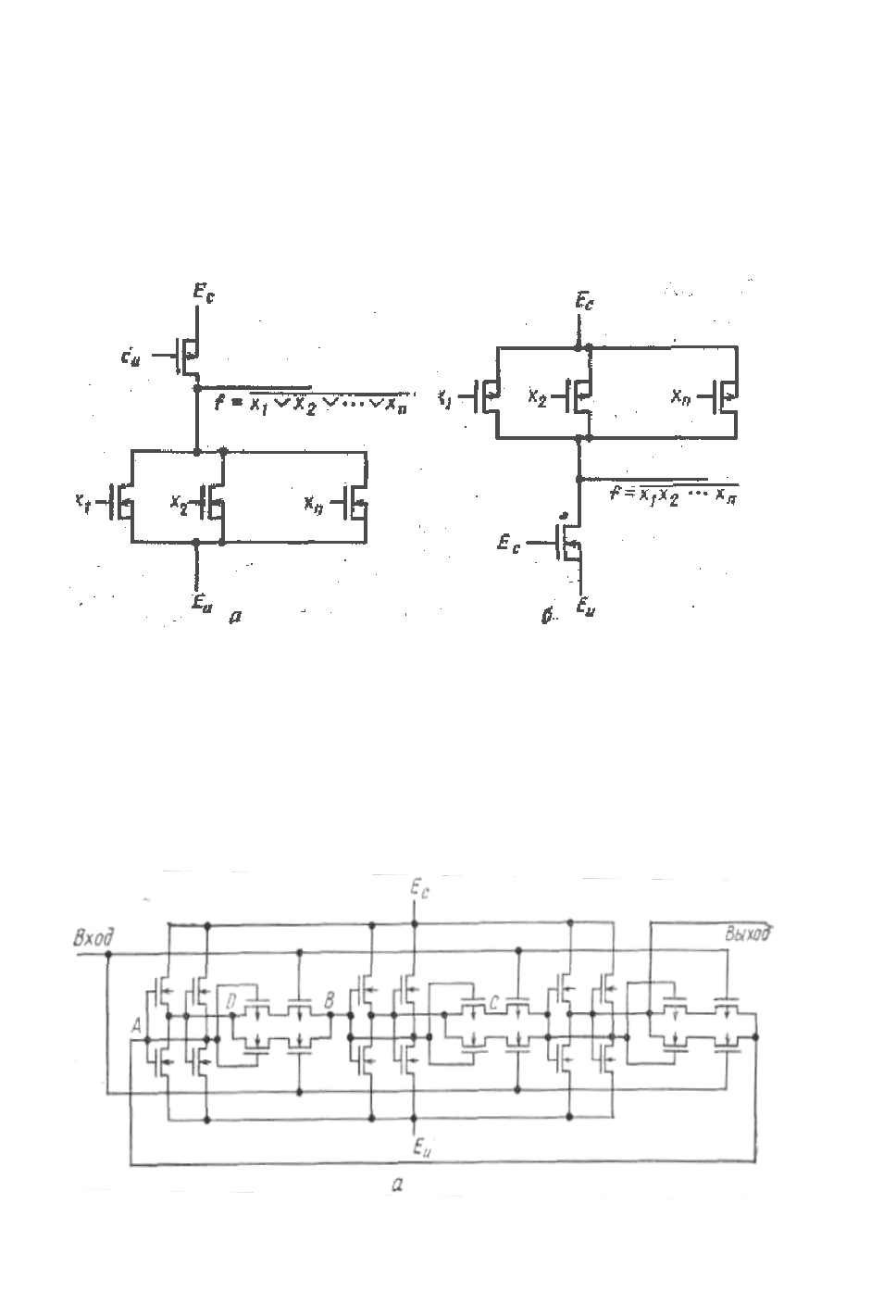
рис. 4.9.15 показаны варианты реализации схем ИЛИ-НЕ и И-НЕ. Одна из
частей схемы — р-МОП или n-МОП — состоит лишь из одного МОП-
транзистора.
Рис. 4.9.15. Разновидности КМОП-структур.
Это приводит к уменьшению кристалла, но одновременно снижается
быстродействие схемы и увеличивается рассеиваемая мощность при некоторых
сочетаниях входных сигналов.
Ясное понимание поставленных задач и объединение этапов
проектирования логических и электрических схем позволяют решить
113
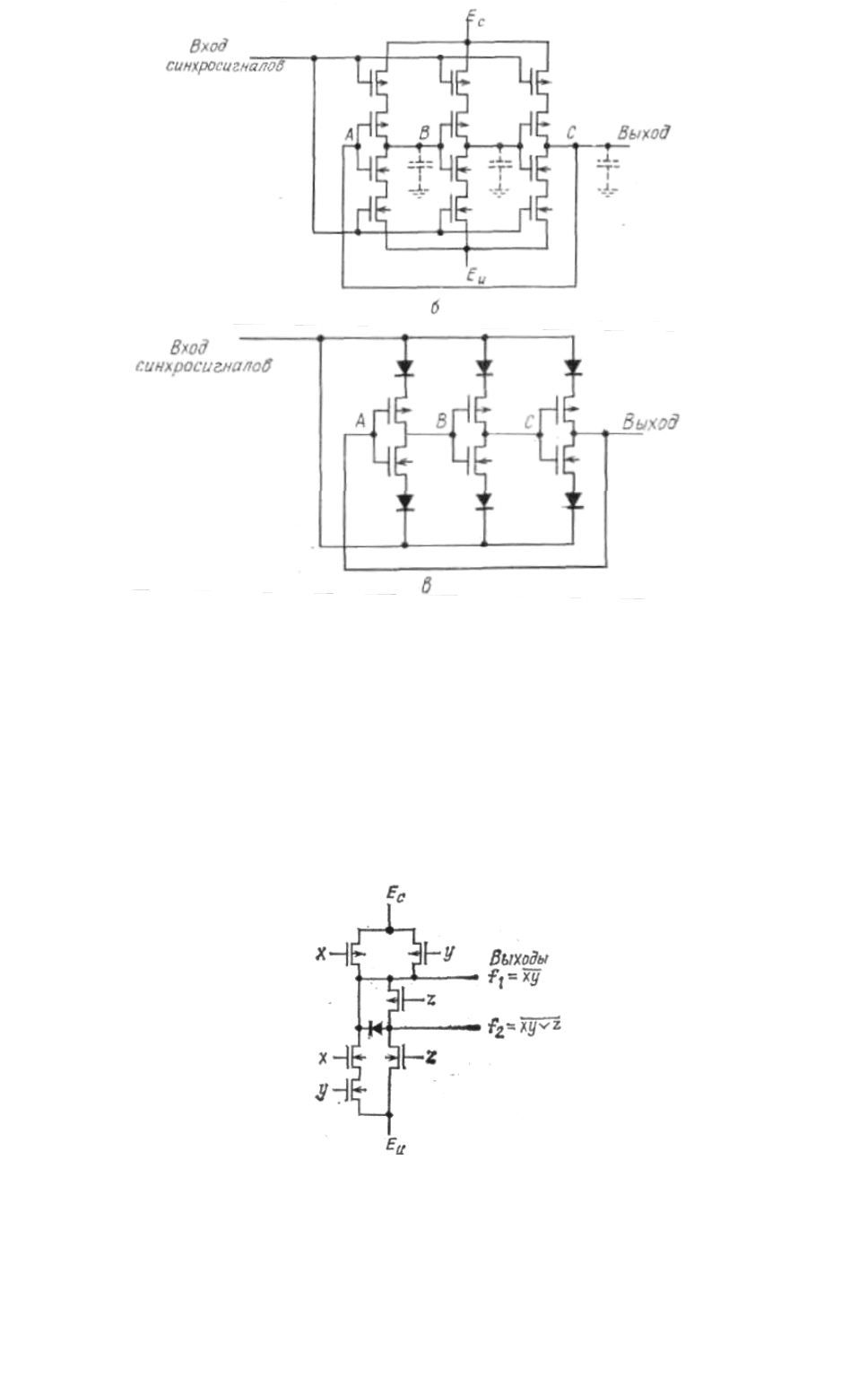
Рис. 4.9.16. а — статическая схема деления на три; б—динамическая схема
деления на три; в — динамическая схема деления на три, реализуемая только
на КМОПСП (источник питания не требуется).
поставленные задачи. Это достигается использованием более простых схем, чем те,
которые получаются при построении на основе ячеек. Для иллюстрации этого
положения рассмотрим схемы деления на три, приведенные на рис. 4.9.16,
которые предназначены для выработки последовательности импульсов с частотой,
равной одной трети частот исходной последовательности
114
Рис. 4.9.17. КМОП-ячейка с двумя выходами.
импульсов. На рис. 4.9.16, а приведена статическая схема, в которой три триггера
соединены КМОП-схемами, похожими по структуре на передаточные вентили.
Даже в том случае, если период следования входных импульсов будет
непостоянным, схема будет работать нормально. Если же временные интервалы
между соседними импульсами во входной последовательности одинаковы и равны
длительности импульсов, т. е. длительность входного сигнала составляет 50%
периода, то может быть использована динамическая КМОП-схема, приведенная
на рис. 4.9.16, б. Паразитные емкости, показанные на рисунке пунктирными
линиями, заряжаются или разряжаются каждый раз при появлении син-
хронизиру щих импульсов. Накопленные п разитными емкостями электрические ю а
заряды должны сохраняться до появления следующих синхроимпульсов. (Эта
схема работает на довольно высоких частотах — порядка 100 МГц.) Схема на рис.
4.9.16, б содержит только 12 полевых МОП-транзисторов, в то время как схема,
приведенная на рис. 4.9.16, а, включает 24 транзистора. Динамическая схема,
изображенная на рис. 4.9.16, в, еще проще. В ней используются диоды,
изготовить которые на кристалле гораздо легче, чем МОП-транзисторы. днако О
такая схема может быть реализована только в виде КМОПСП-структуры.
Фирма Hewlett-Packard разработала КМОП-ячейки с двумя выходами,
ана ол гичные изображенной на рис. 4.9.17, в которых реализация двух различных
функций f
1
и f
2
достигается за счет добавления диода. Наличие двух выходных
функций обеспечивает большие логические возможности каждой КМОП-ячейки.
Следовательно, для построения КМОП-схемы с заданными выходными
функциями потр буетс меньшее количество ячеек. е я
Динамические схемы часто используют по другим, особым причинам.
Пр веи дем соответствующие примеры.
КМОП-структура «домино» (рис. 4.9.18) состоит из элементов, каждый из
кот ро ых содержит логическую схему КМОП и КМОП-инвертор. Логическая
КМОП-ячейка в каждом элементе (ячейки 1, 3 и 5) содержит р-МОП-схему,
состоящую из одного р-МОП-транзистора, управляемого синхросигналами, и n-
МОП-схему, состоящую из нескольких n-МОП-транзисторов
115

Рис. 4.9.19. Сравнение динамической и традиционной КМОП-структур:
а — с виго-двиговый регистр на статической КМОП-структуре; б — топология сд
вого регистра на статической КМОП-структуре; в — сдвиговый регистр на
динамической КМОП-структуре (синхронизируемой КМОП-структуре); г —
топология сдвигового регистра на синхронизируемой КМОП-структуре.
с логическими входами и одного n-МОП-транзистора, управляемого
синхросигналами. а каждой еской КМОП-ячейкой следует и вертирующая З логич н
КМОП-ячейка (ячейки 2, 4 и 6). При отсутствии синхросигналов на входах,
обозначенных буквой с, все паразитные емкости (показанные штриховыми
линиями) заряжены до высокого уровня напряжения, т. е. до 1, потому что все р-
МОП-транзисторы открыты. Следовательно, на выходах всех инверторов
формируется логический 0, Допустим, что x=υ = 1 (т. е. на указанных входах
присутствует высокое напряжение), a y=z=u=0 (низкое напряжение). При
появлении синхроимпульса (сигнала с=1) все р-МОП-транзисторы запираются. В
результате выходные сигналы ячеек 1—6 принимают соответственно значения
0,1,1,0,0 и 1. Заметим, что на выходе ячейки 3 напряжение заряда сохраняется, так
как n-МОП-транзистор при таком значении и остается закрытым. КМОП-структура
«домино» обладает следующими достоинствами. Она занимает относительно
небольшую площадь, так как р-МОП-часть каждой логической ячейки состоит из
одного транзистора. Ей свойственно более высокое быстродействие (примерно
в два раза) по сравнению со статической КМОП-структурой, рассмотренной выше.
Это связано с уменьшением паразитных емкостей за счет использования в каждой
ячейке одного р-МОП-транзистора и буферирования каждой логической ячейки
инвертором. Наконец, в этой схеме отсутствует дребезг (т. е. передача сигнала
происходит без скачков), потому что в момент переключения на выходе каждой
ячейки высокое напряжение либо сохраняется, либо понижается, а изменений
напряжения с низкого на высокое не происходит.
Динамические схемы используются также для уменьшения площади кристалла,
так как в некоторых случаях их топология довольно простая. На рис. 4.9.19,а
показан обычный сдвиговый регистр, реализованный на статической КМОП-
структуре. (Здесь показан только один разряд регистра. Для построения
многоразрядного сдвигового регистра соединяют соответствующее количество
таких схем.) Схема работает с двухфазной синхронизацией φ
1
и φ
2
. Форма сигналов
приведена на рис. 4.8.5, б (сигналы φ
1
и φ
2
не перекрываются). К каждой ячейке
подводится синхросигнал φ
1
(или φ
2
) и его инверсное значение
1
ϕ
(или
2
ϕ
).
Топология синхронизируемого КМОП-регистра, разработанного фирмой Tos a hib
116
117
(рис. 4.9.19, в), занимает меньшую площадь (рис. 4.9.19, г), чем топология
обычного сдвигового регистра на КМОП-элементах (рис. 4.9.19, б), так как имеет
регулярную структуру. Необходимо отметить, что передаточные вентили,
имеющиеся в схеме на рис. 4.9.19, а, исключены из схемы на рис. 4.9.19, в, хотя
количество транзисторов осталось прежним.
Правильное использование вышеописанных, а возможно, и других
разно о т пвидностей КМОП-структур п зволяет уменьши ь лощадь кристаллов с
одновременным улучшением их арактеристик. Часто одном и том же х в
кристалле совместно используют n-МОП- и КМОП-схемы с целью повышения
его быстродействия или уменьшения занимаемой площади.
4.4. Динамические МОП-схемы
В этом разделе будут рассмотрены динамические МОП-схемы, работа
которых основана на других принципах. В этих схемах логические значения 1 и 0
выражаются наличием или отсутствием заряда на паразитной
Рис. 4.8.1. Статический инвертор.
емкости в момент подачи синхроимпульса. Достоинства динамических МОП-схем
заключаются в малой потребляемой мощности и небольших размерах, однако их
быстродействие ниже
,
чем у статических схем.
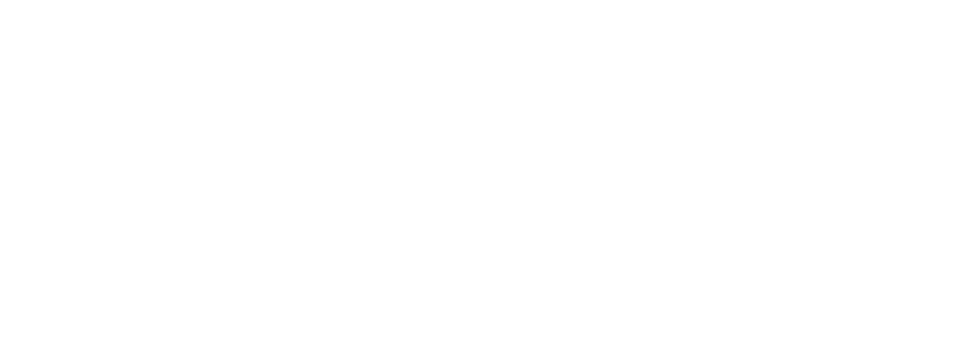
Рассмотрим различия между статическими и динамическими МОП-схемами
на примере инвертора. Статический инвертор, работа которого отчасти уже была
обсуждена в предыдущих разделах, приведен на рис. 4.8.1, а. Как показано в разд.
4.3, для обеспечения достаточно большого перепада напряжения необходимо, чтобы
отношение сопротивлений нагрузочного (Т
2
) и активного (Т
1
) (в открытом
состоянии) транзисторов было высоким. Поэтому статический инвертор
называют также инвертором с отношением. Когда входное напряжение U
BX
меняется
от высокого (логической 1) до низкого (логического 0) уровня, паразитная емкость
с
1
должна зарядиться до напряжения источника питания Е
с
через нагрузочный
транзистор Т
2
, сопротивление которого выше, чем сопротивление транзистора Т
1
,
вследствие чего емкость С
1
заряжается медленно. Когда же U
BX
меняется от
низкого уровня до высокого, емкость с
i
должна разряжаться через активный
транзистор Т
1
, обладающий гораздо-меньшим сопротивлением, чем транзистор Т
2
.
Поэтому изменение выходного напряжения U
BЫX
от 1 до 0 происходит быстрее,
чем от 0 до 1 (рис. 4.8.1, б). Ток i
D
протекает от источника питания к земле в том
случае, когда входное напряжение U
BX
является высоким.
Двухфазные динамические МОП-схемы
118
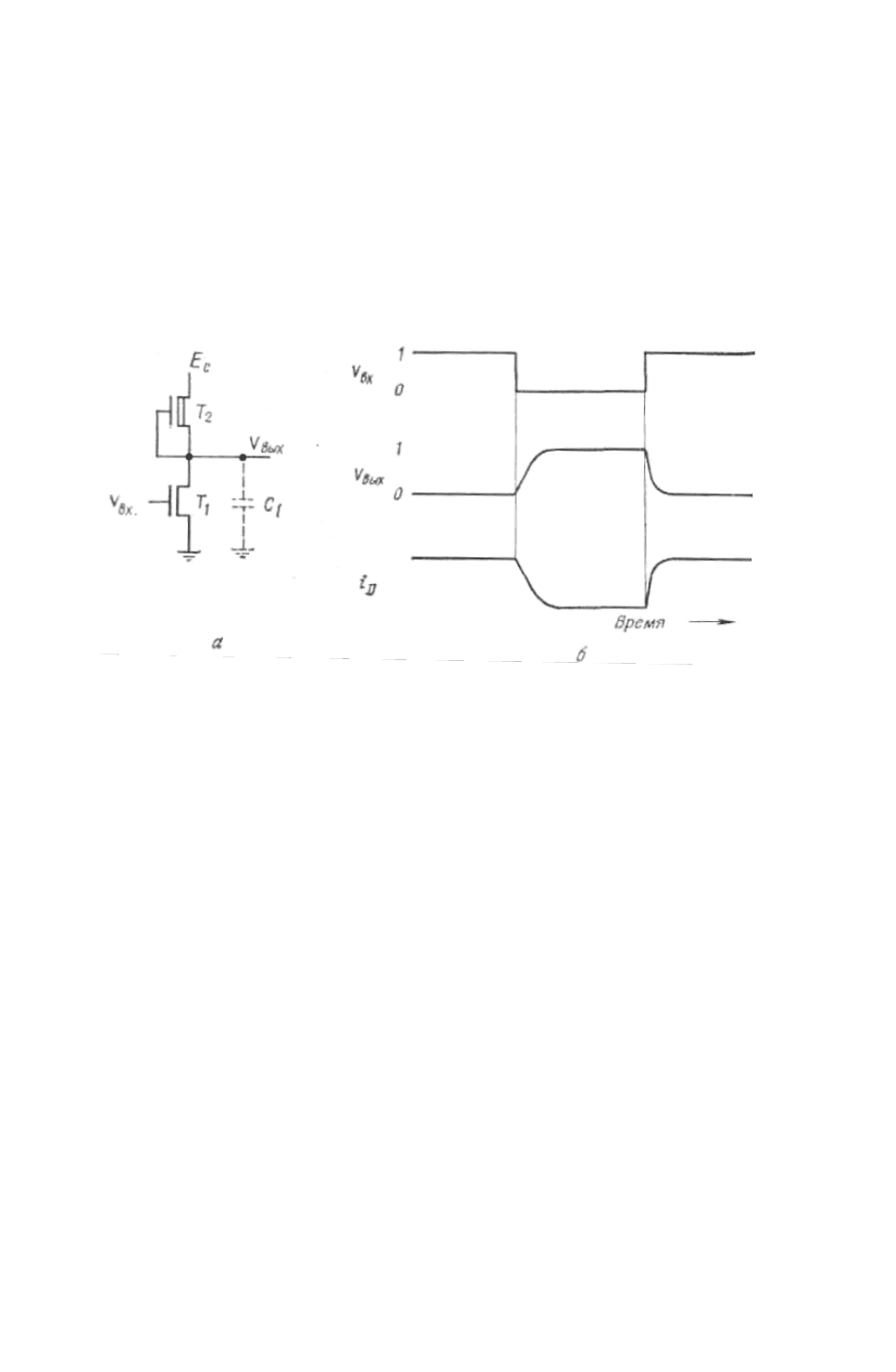
На рис. 4.8.2, а показан инвертор на динамических МОП-ячейках,
называемый двухфазным инвертором без отношения. На схему поступают
последовательности синхроимпульсов φ
1
и φ
2
, причем каждая последовательность
синхроимпульсов поступает на два входа. Отметим, что синхроимпульсы разных
последовательностей подаются на входы МОП-ячеек разного уровня
Рис. 4.8.2. Двухфазный динамический инвертор.
схемы, а также тот факт, что ни одна точка схемы (рис. 4.8.2,а) не подсоединена к
земле. Заземлен один из полюсов синхронизирующего генератора (т. е.
синхронизирующего источника питания), и схема обладает паразитными емкостями
относительно земли, показанными штриховой линией.
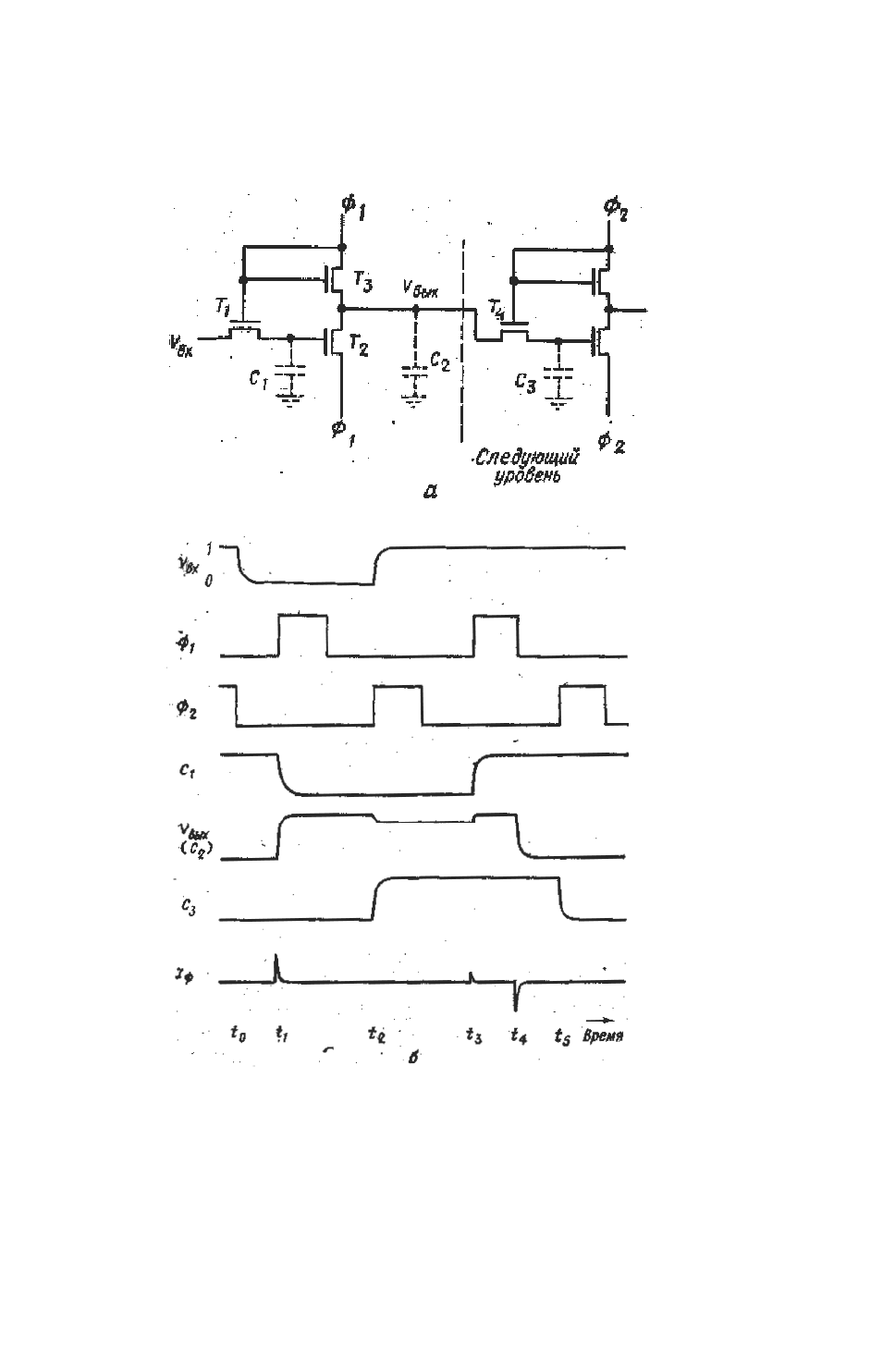
Предположим, что в момент t
0
(рис. 4.8.2, б) входное напряжение U
BX
меняется от высокого уровня (логическая 1) до низкого (логический 0). При этом
паразитная емкость С
1
заряжена, а емкости С
2
и С
з
разряжены. В момент t
1
синхроимпульс φ
1
переводит транзисторы Т
1
и Т
3
в открытое состояние.
119
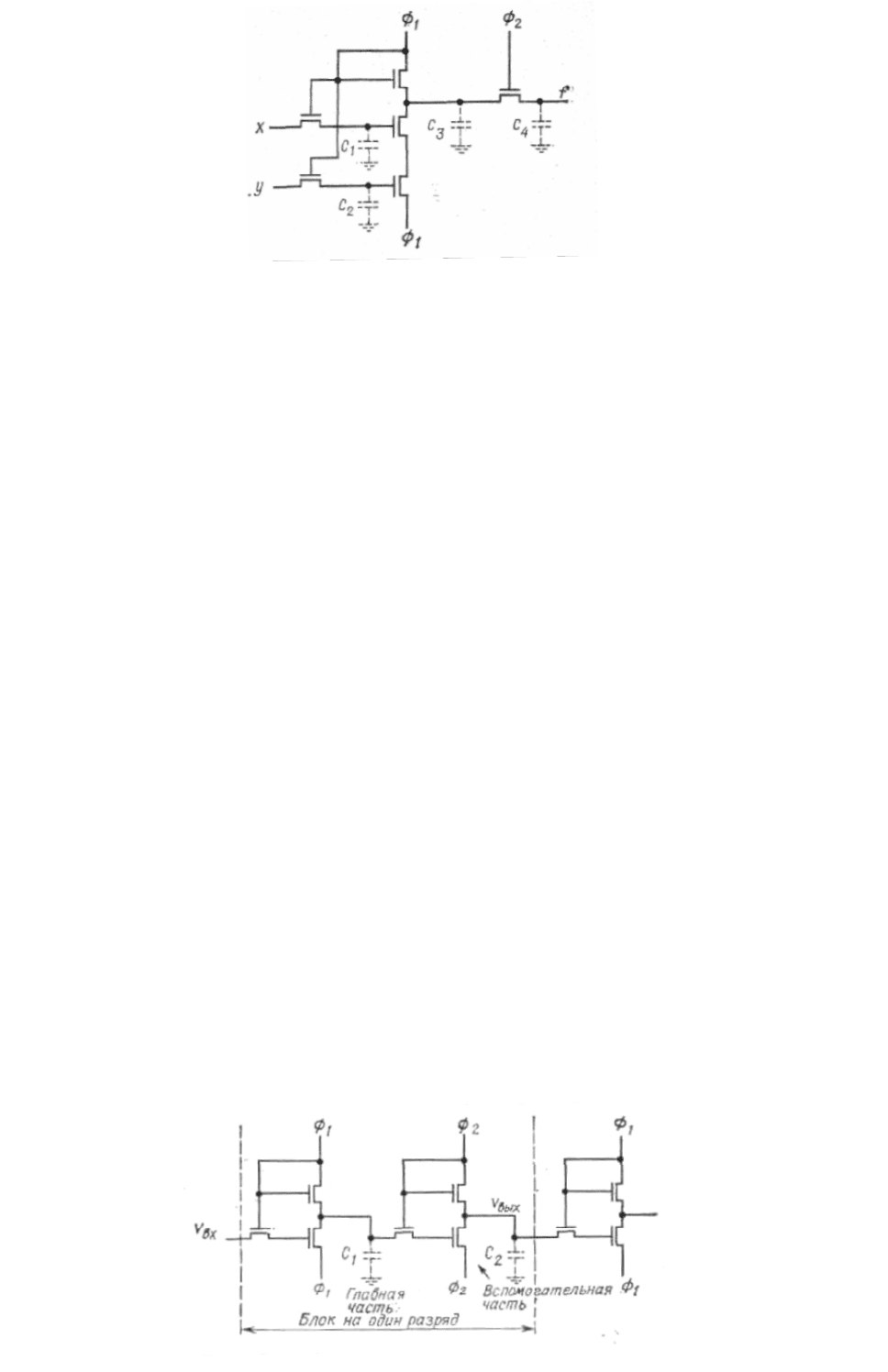
Рис. 4.8.3. Двухфазная динамическая ячейка, реализующая операцию И-НЕ.
(Подчеркнем, что синхроимпульс φ
1
подается на транзисторы Т
1
и Т
3
.) Емкость С
1
разряжается через T
1
и линию подачи входного напряжения U
BX
на землю, в результате
чего транзистор Т
2
запирается. Емкость С
2
заряжается через транзистор Т
3
до высокого
напряжения, которое на ней сохраняется даже после снятия синхроимпульса φ
1
. В
момент t
2
синхроимпульс φ
2
обеспечит открывание транзистора Т
4
, что ведет к
передаче электрического заряда с емкости С
2
на С
3
. (Необходимо отметить, что φ
2
и Т
4
являются частью МОП-ячейки следующего уровня.) Допустим, что в момент t
2
U
BX
становится равным логической 1. В момент t
3
синхроимпульс φ
1
открывает
транзисторы T
1
и T
3
. Емкость С
1
заряжается до величины U
BX
, открывая транзистор Т
2
.
Хотя транзисторы T
2
и T
3
находятся в проводящем состоянии,, емкость С
2
не
разряжается, так как напряжение на ней равно напряжению синхроимпульса φ
1
. В
момент t
4
действие синхроимпульса φ
1
заканчивается и транзисторы T
1
и T
3
запираются. Однако транзистор T
2
сохраняет проводимость, поскольку емкость С
1
остается заряженной до высокого уровня напряжения. Таким образом, емкость С
2
разряжается через транзистор T
2
. В момент t
5
синхроимпульс φ
2
открывает транзистор
Т
4
, в результате чего емкость С
3
разряжается через транзистор Т
2
. Таким образом, на
выходе появится напряжение U
BЫX
, представляющее собой инверсное значение
входного сигнала U
BX
, которое поступает также и на С
3
. Отметим, что емкость С
2
всегда заряжается при подаче синхроимпульса φ
1
. Этот процесс называется
предварительным зарядом.
Заметим, что в данном случае (рис. 4.8.2, б) протекает лишь импульсный ток i
φ
заряда или разряда паразитной емкости С
2
, в то время как в статических схемах (рис.
4.8.1, б) ток i
D
течет достаточно долгое время. В результате потребляемая мощность
динамического инвертора (рис. 4.8.2, а) гораздо меньше, чем статического инвертора
(рис. 4.8.1, а).
120