Руководство. Основы, Справочник по программированию Sinumerik 840D (new)
Подождите немного. Документ загружается.


Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
11
Содержание
12.7 Программируемое отражение (MIRROR, AMIRROR) ......................................................... 365
12.8 Создание фрейма по точной установке инструмента
(TOFRAME, TOROT, PAROT)................................................................................................ 370
12.9 Отключение фрейма (G53, G153, SUPA, G500).................................................................. 374
12.10 Отключение наложенных движений (DRFOF, CORROF) ................................................... 375
13 Вывод вспомогательных функций .......................................................................................................379
13.1 Функции M .............................................................................................................................. 383
14 Дополнительные команды ....................................................................................................................387
14.1 Сообщения (MSG) ................................................................................................................. 387
14.2 Запись строки в переменную BTSS (WRTPR) ..................................................................... 389
14.3 Ограничение рабочего поля ................................................................................................. 390
14.3.1 Ограничение рабочего поля в BKS (G25/G26, WALIMON, WALIMOF) .............................. 390
14.3.2 Ограничение рабочего поля в WCS/ENS (WALCS0 ... WALCS10) ..................................... 394
14.4 Реферирование (G74) ........................................................................................................... 397
14.5 Движение к фиксированной точке (G75, G751)................................................................... 398
14.6 Наезд на жесткий упор (FXS, FXST, FXSW) ........................................................................ 403
14.7 Динамические характеристики ............................................................................................. 408
14.7.1 Режим ускорения (BRISK, BRISKA, SOFT, SOFTA, DRIVE, DRIVEA) ................................ 408
14.7.2 Управление ускорением для ведомых осей (VELOLIMA, ACCLIMA, JERKLIMA) ............. 411
14.7.3 Активация спец. для технологии динамических значений
(DYNNORM, DYNPOS, DYNROUGH, DYNSEMIFIN, DYNFINISH) ...................................... 413
14.8 Движение с предуправлением (FFWON, FFWOF) .............................................................. 415
14.9 Точность контура (CPRECON, CPRECOF) .......................................................................... 416
14.10 Время ожидания (G4) ............................................................................................................ 417
14.11 Внутренняя остановка предварительной обработки .......................................................... 419
15 Прочая информация .............................................................................................................................421
15.1 Оси .......................................................................................................................................... 421
15.1.1 Главные оси/геометрические оси ......................................................................................... 423
15.1.2 Дополнительные оси ............................................................................................................. 424
15.1.3 Главный шпиндель, мастер-шпиндель ................................................................................ 424
15.1.4 Оси станка .............................................................................................................................. 425
15.1.5 Оси канала ............................................................................................................................. 425
15.1.6 Траекторные оси .................................................................................................................... 425
15.1.7 Позиционирующие оси .......................................................................................................... 426
15.1.8 Синхронные оси ..................................................................................................................... 427
15.1.9 Командные оси ....................................................................................................................... 427
15.1.10 Оси PLC .................................................................................................................................. 427
15.1.11 Оси Link .........................................................
......................................................................... 428
15.1.12 Оси Lead-Link ......................................................................................................................... 430
15.2 От команды движения до движения станка......................................................................... 432
15.3 Вычисление хода ................................................................................................................... 433

Содержание
Основы
12
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
15.4 Адреса .................................................................................................................................... 434
15.5 Идентификатор ...................................................................................................................... 439
15.6 Постоянные ............................................................................................................................ 441
16 Таблицы .................................................................................................................................................443
16.1 Операторы.............................................................................................................................. 443
16.2 Операторы: Доступность для SINUMERIK 828D ................................................................. 494
16.3 Адреса .................................................................................................................................... 516
16.4 Группы функций G ................................................................................................................. 526
16.5 Предопределенные вызовы подпрограмм .......................................................................... 543
16.6 Предопределенные вызовы подпрограмм в синхронных действиях движения ............... 559
16.7 Предопределенные функции ................................................................................................ 560
16.8 Текущий язык в HMI............................................................................................................... 567
A Приложение ...........................................................................................................................................569
A.1 Список сокращений ............................................................................................................... 569
A.2 Обзор документации.............................................................................................................. 574
Толковый словарь ..................................................................................................................................577
Основы
Справочник по программированию 02/2011, 6FC5398-1BP40-1PA0
13
1
Геометрические основы
1.1 Позиции детали
1.1.1 Системы координат детали
Чтобы станок или СЧПУ могли работать с указанными в программе ЧПУ позициями, эти
параметры должны быть указанны в базовой системе, которая может быть передана
на направлениям движения осей станка. Для этого используется система координат с
осями X, Y и Z.
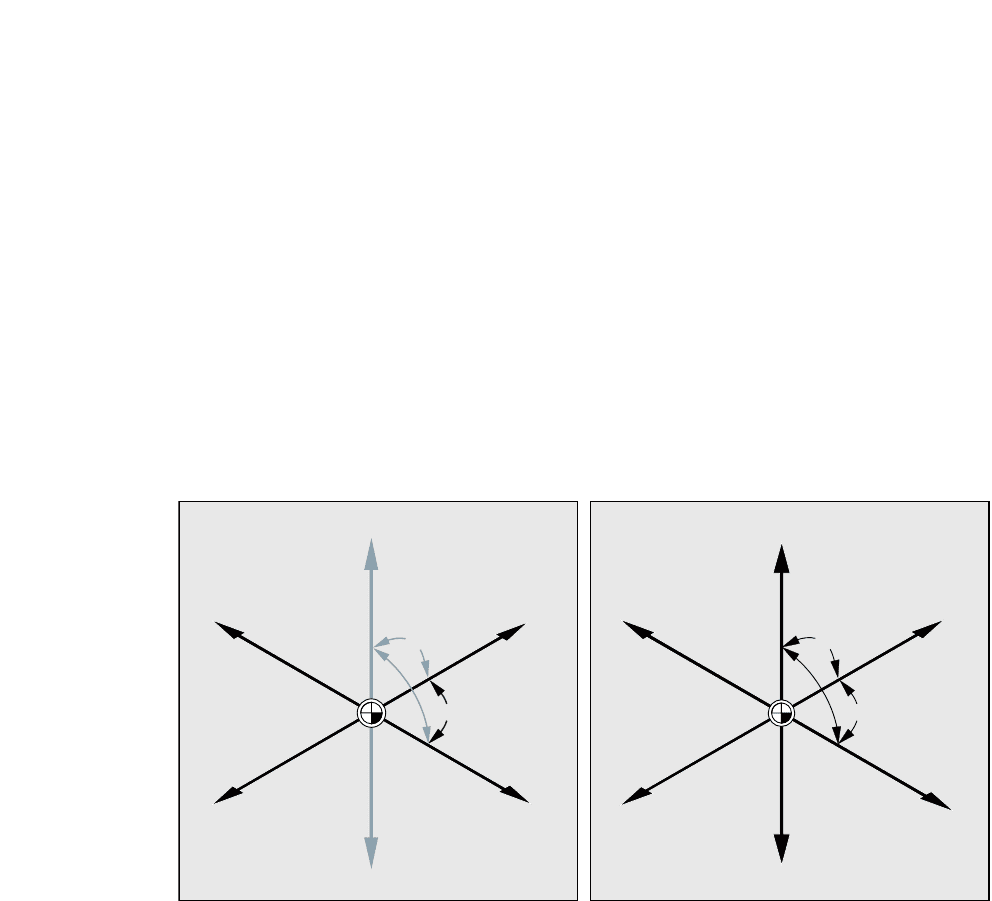
По DIN 66217 для станков используются правовращающиеся, прямоугольные
(декартовы) системы координат.
Нулевая точка детали (W) является исходной точкой системы координат детали.
Иногда имеет смысл или даже необходимо работать с отрицательными указаниями
позиции. Поэтому позиции, находящиеся соответственно слева от нулевой точки,
получают отрицательный знак (-).
Изображение 1-1 Система координат детали
для токарной обработки
Изображение 1-2 Система координат детали
для фрезерования
=
= ;
;
<
r
r
r:
<
;
; <
<
=
=
r
r
r
:
Геометрические основы
1.1 Позиции детали
Основы
14 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
1.1.2 Декартовы координаты
Оси в системе координат измерены. Благодаря этому существует возможность
однозначного описания любой точки в системе координат и тем самым любой позиции
детали через направление (X, Y и Z) и три числовых значения. Нулевая точка детали
всегда имеет координаты X0, Y0 и Z0.
Указание позиций в форме декартовых координат
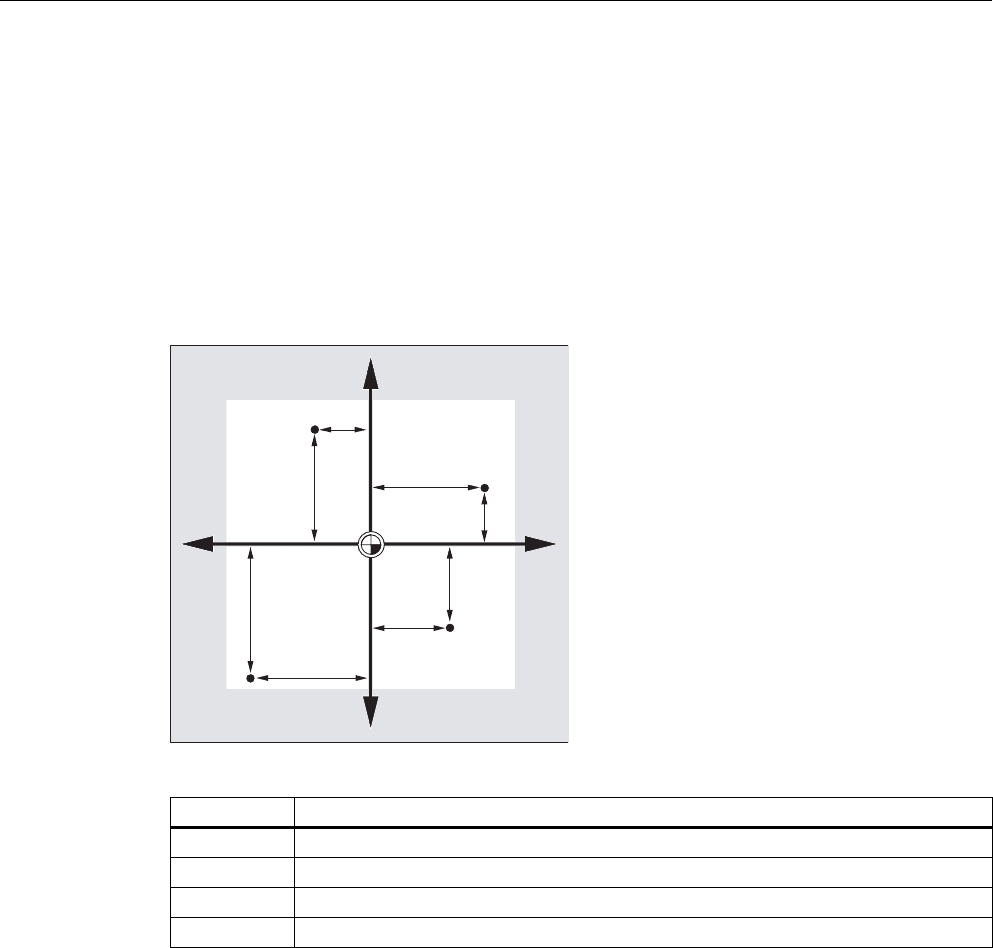
Для упрощения в этом примере рассматривается только одна плоскость системы
координат, плоскость X/Y:
В этом случае точки P1 до P4 имеют следующие координаты:
Позиция координаты
P1 X100 Y50
P2 X-50 Y100
P3 X-105 Y-115
P4 X70 Y-75
;
;
<
<
3
3
3
3
Геометрические основы
1.1 Позиции детали
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
15
Пример: Позиции детали при токарной обработке
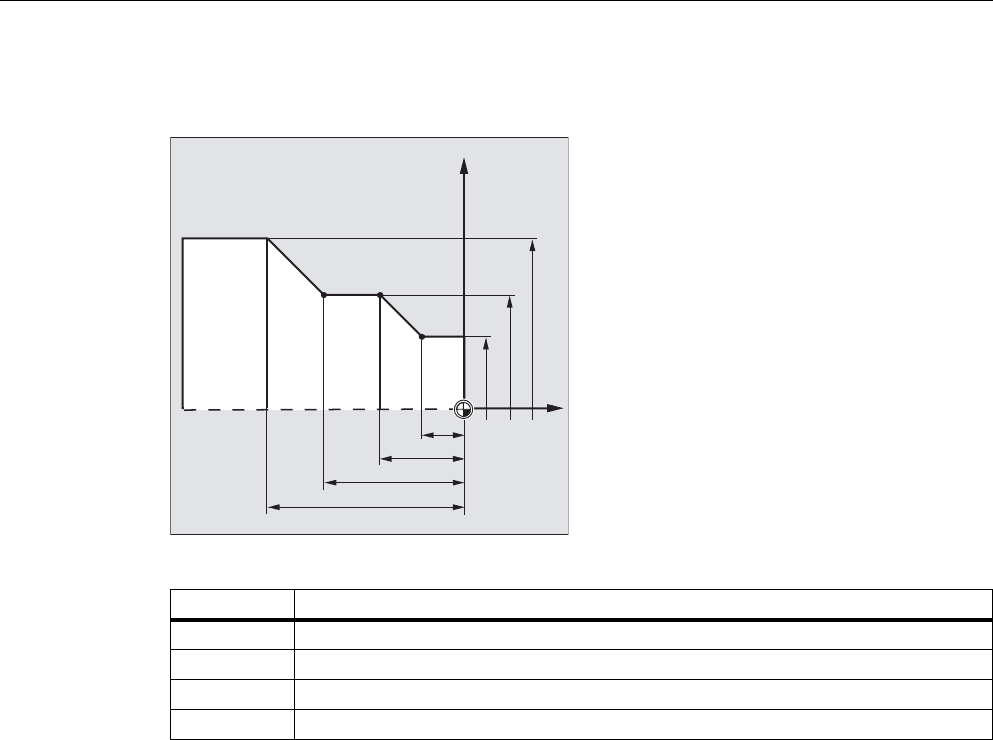
У токарных станков достаточно одной плоскости для описания контура:
В этом случае точки P1 до P4 имеют следующие координаты:
Позиция координаты
P1 X25 Z-7.5
P2 X40 Z-15
P3 X40 Z-25
P4 X60 Z-35
=
;
3
3 3
3
Геометрические основы
1.1 Позиции детали
Основы
16 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
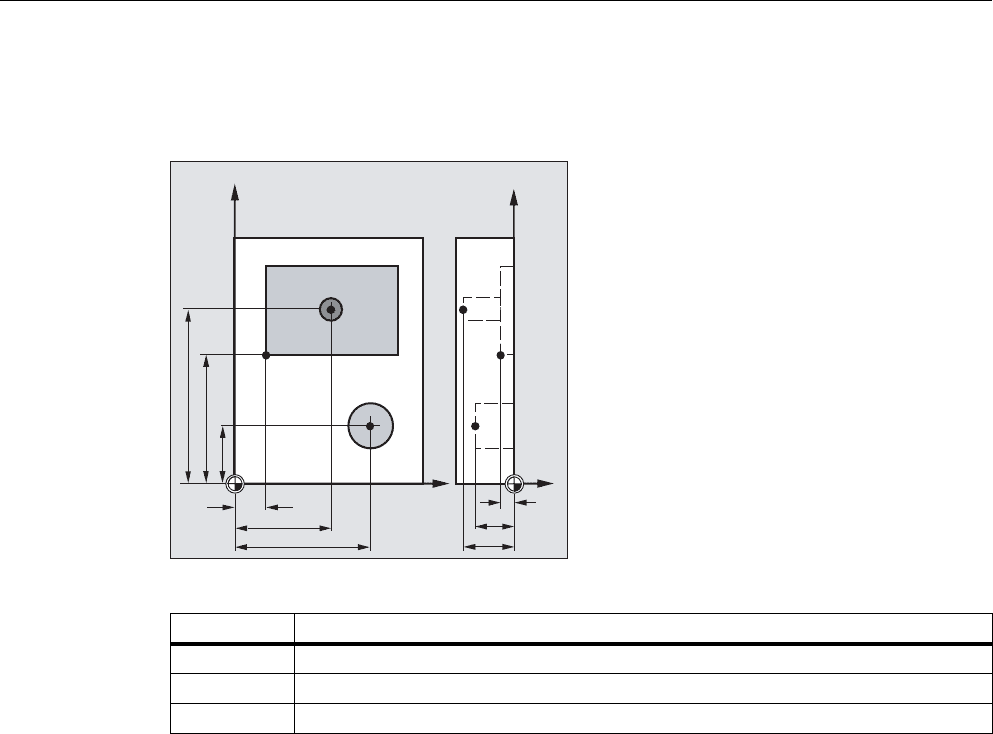
Пример: Позиции детали при фрезерной обработке
При фрезерных обработках необходимо описать и глубину подачи, т.е. и третьей
координате (в этом случае Z) необходимои присвоить числовое значение.
Точки P1 до P3 имеют следующие координаты:
Позиция координаты
P1 X10 Y45 Z-5
P2 X30 Y60 Z-20
P3 X45 Y20 Z-15
3
3
3
3
3
3
<
=
<
;
Геометрические основы
1.1 Позиции детали
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
17
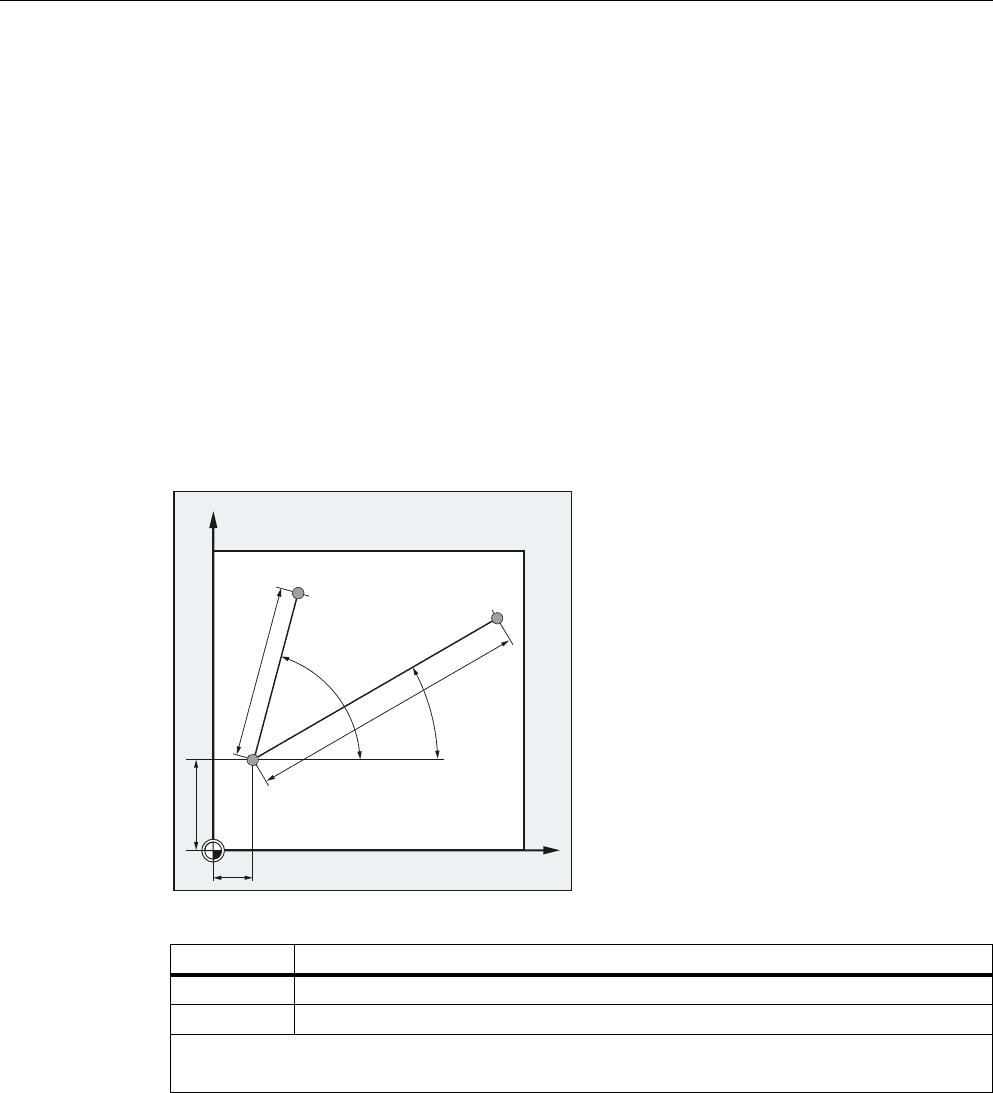
1.1.3 Полярные координаты
Вместо декартовых координат для описания позиций детали могут использоваться и
полярные координаты. Это имееет смысл в тех случаях, когда деталь или часть детали
измерены с радиусом и углом. Исходная точка измерения называется "Полюс".
Указание позиций в форме полярных координат
Полярные координаты состоят из полярного радиуса и полярного угла.
Полярный радиус это расстояние между полюсом и позицией.
Полярный угол это угол между полярным радиусом и горизонтальной осью рабочей
плоскости. Отрицательные полярные углы проходят по часовой стрелке,
положительные - против часовой стрелки.
Пример
Точки P1 и P2 могут быть описаны относительно полюса следующим образом:
Позиция Полярные координаты
P1 RP=100 AP=30
P2 RP=60 AP=75
RP: полярный радиус
AP: полярный угол
̶͕͒ͥ͘
;
<
3
3
r
r
Геометрические основы
1.1 Позиции детали
Основы
18 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
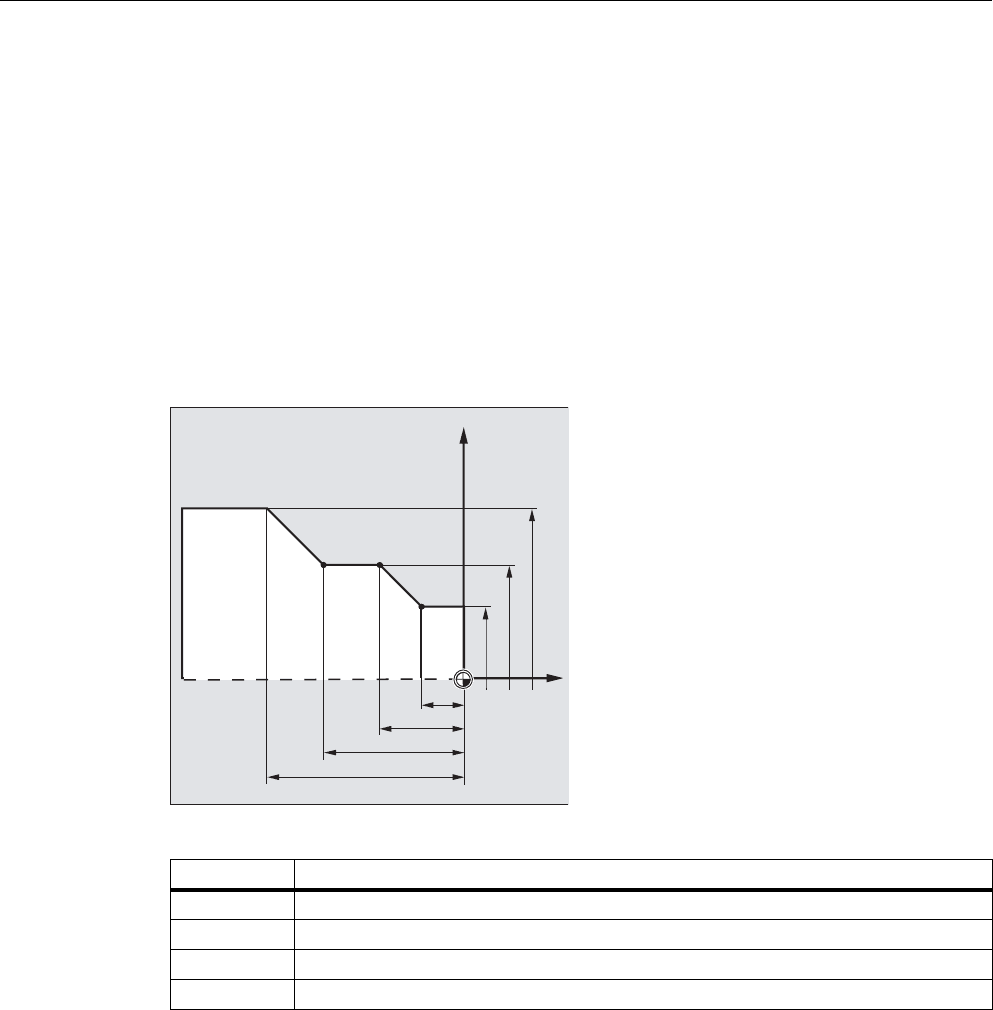
1.1.4 Абсолютный размер
Указание позиций в абсолютном размере
У абсолютного размера все указания позиций всегда относятся к действующей в
данный момент нулевой точке.
В отношении движения инструмента это означает:
Указание абсолютного размера описывает позицию, к которой должен двигаться
инструмент.
Пример: Токарная обработка
В абсолютном размере для точек P1 до P4 получаются следующие данные позиций:
Позиция Указание позиций в абсолютном размере
P1 X25 Z-7,5
P2 X40 Z-15
P3 X40 Z-25
P4 X60 Z-35
=
;
3
3 3
3
Геометрические основы
1.1 Позиции детали
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
19
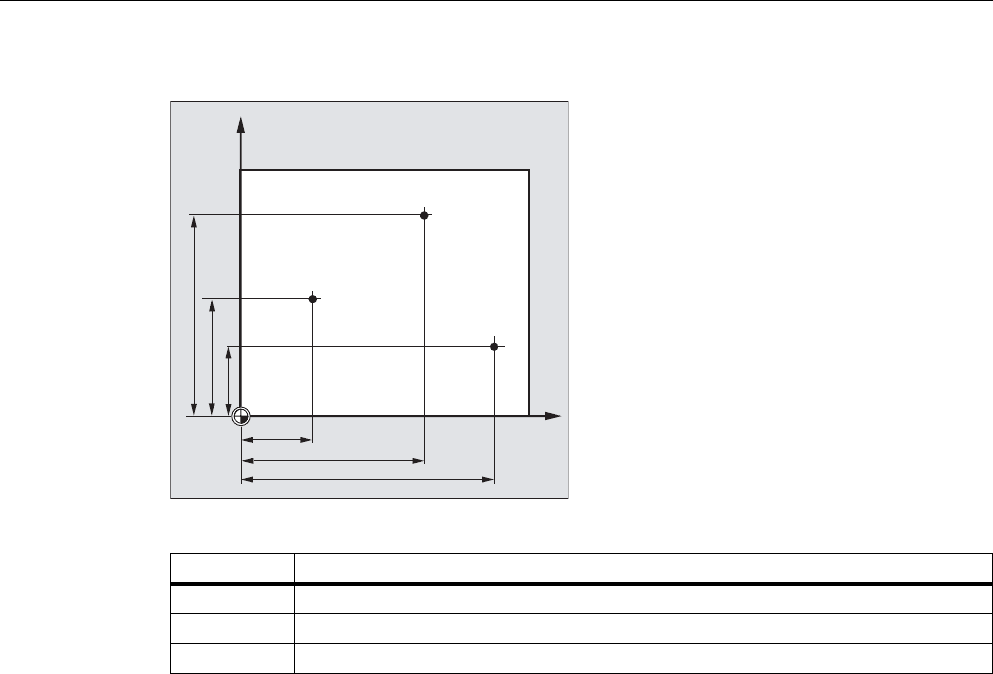
Пример: Фрезерование
В абсолютном размере для точек P1 до P3 получаются следующие данные позиций:
Позиция Указание позиций в абсолютном размере
P1 X20 Y35
P2 X50 Y60
P3 X70 Y20
;
<
3
3
3
Геометрические основы
1.1 Позиции детали
Основы
20 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
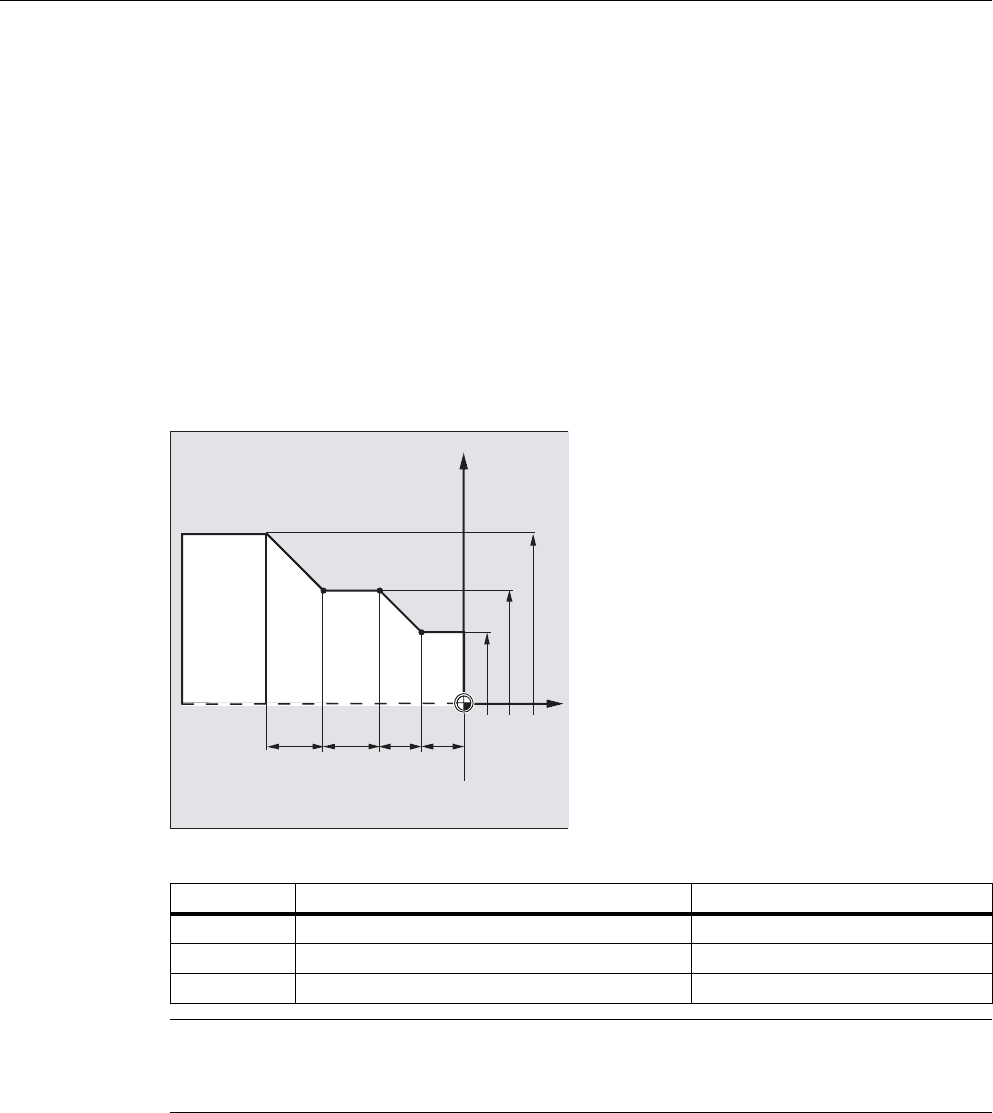
1.1.5 Составной размер
Указание позиций в составном размере (инкрементальном размере)
На рабочих чертежах размеры часто относятся не к нулевой точке, а к иной точке
детали. Во избежание пересчета данных размера существует возможность указания
составного или инкрементального размера. При таком способе указания составного
размера данные позиции относится к соответствующей предыдущей точке.
В отношении движения инструмента это означает:
Данные составного размера описывают, на сколько должен переместиться инструмент.
Пример: Токарная обработка
В составном размере для точек P2 до P4 получаются следующие данные позиций:
Позиция Указание позиций в составном размере Данные относятся к:
P2 X15 Z-7,5 P1
P3 Z-10 P2
P4 X20 Z-10 P3
=
;
3
3 3
3
Примечание
При имеющейся DIAMOF или DIAM90 заданный путь при указании составного размера
(G91) программируется как размер радиуса.