Руководство. Основы, Справочник по программированию Sinumerik 840D (new)
Подождите немного. Документ загружается.

Геометрические основы
1.1 Позиции детали
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
21
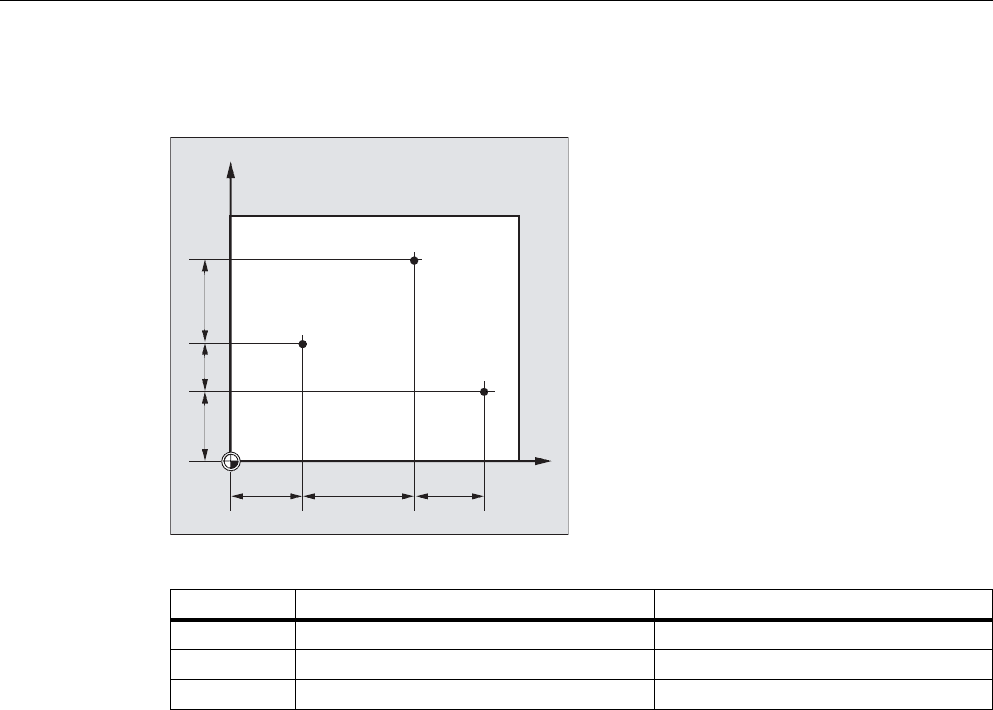
Пример: Фрезерование
Указание позиции для точек P1 до P3 в составном размере:
В составном размере для точек P1 до P3 получаются следующие данные позиций:
Позиция Указание позиций в составном размере Данные относятся к:
P1 X20 Y35 Нулевая точка
P2 X30 Y20 P1
P3 X20 Y -35 P2
;
<
3
3
3
Геометрические основы
1.2 Рабочие плоскости
Основы
22 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
1.2 Рабочие плоскости
Программа ЧПУ должна содержать информацию о том, в какой плоскости должна
выполняться обработка. Только в этом случае СЧПУ при выполнении программы ЧПУ
может правильно учитывать значения коррекции инструмента. Кроме этого указание
рабочей плоскости имеет значение для определенных видов программирования
окружностей и для полярных координат.
Соответственно две оси координат определяют плоскость. Третья ось координат стоит
соответственно вертикально на этой плоскости и определяет направление подачи
инструмента (к примеру, для обработки 2D).
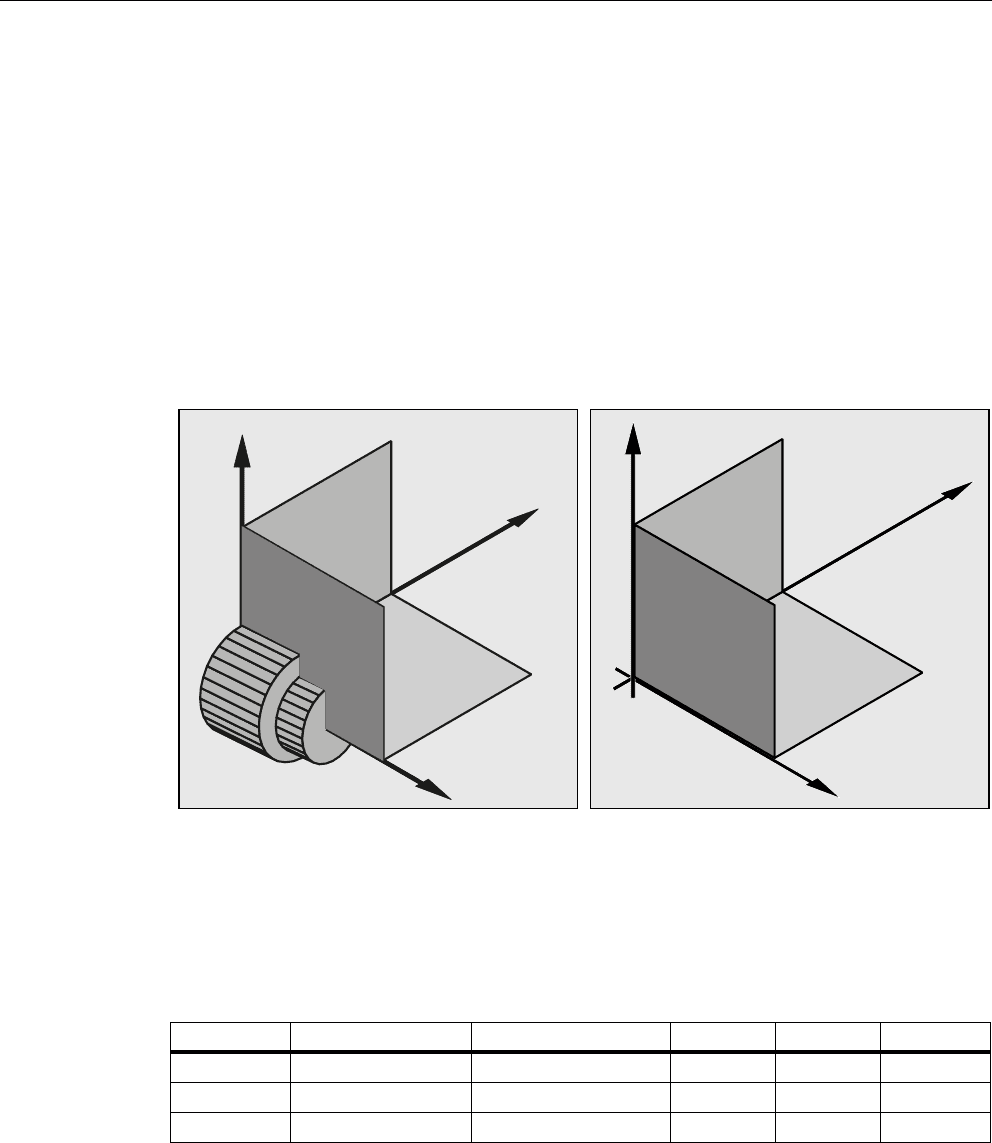
Рабочие плоскости при токарной / фрезерной обработке
Программирование рабочих плоскостей
Рабочие плоскости определяются в программе ЧПУ с помощью команд G G17, G18 и
G19 следующим образом:
Изображение 1-3 Рабочие плоскости при
токарной обработке
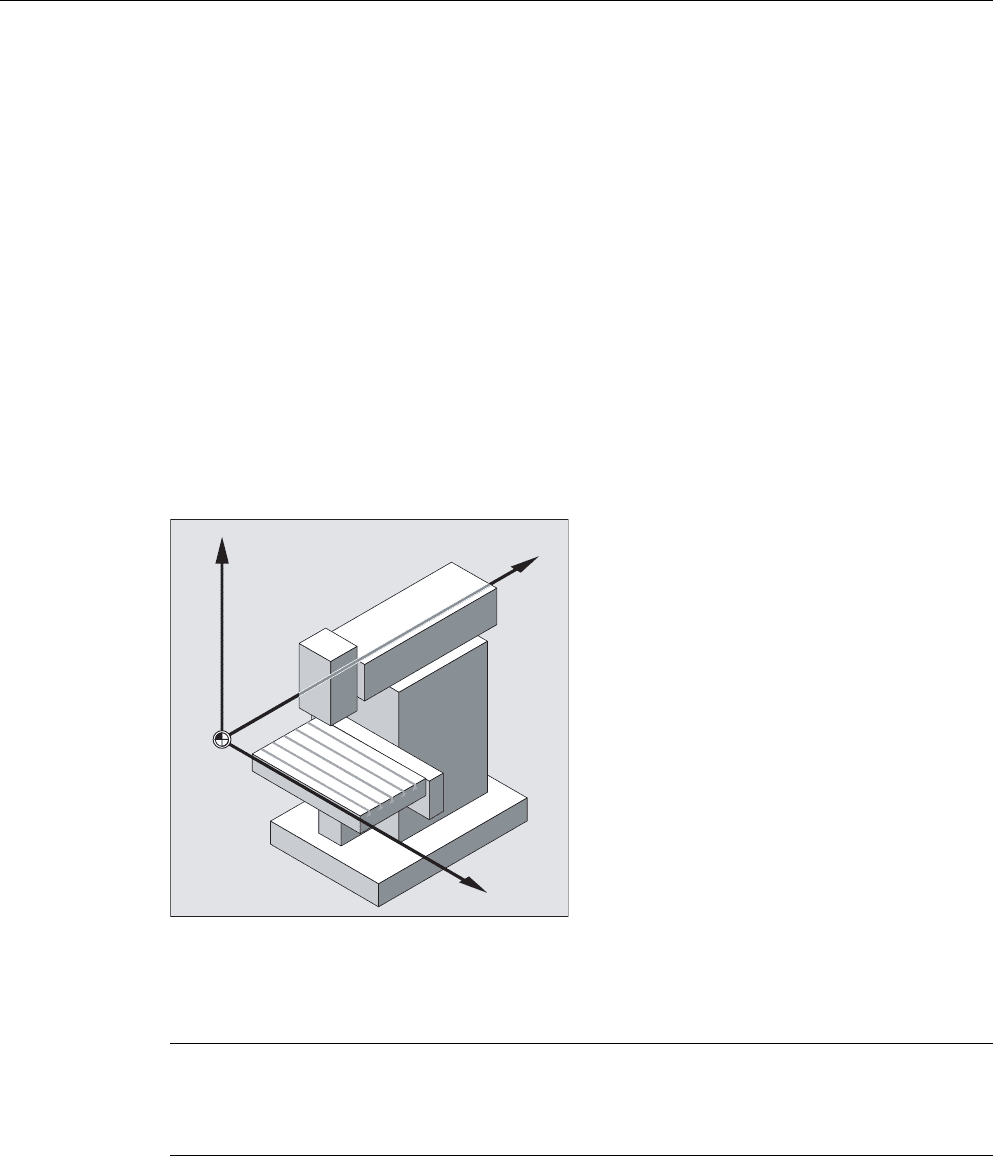
Изображение 1-4 Рабочие плоскости при
фрезерной обработке
*
*
<
;
=
*
;
<
=
*
*
*
Команда G Рабочая плоскость Направление подачи Абсцисса Ордината Аппликата
G17
X/Y Z XYZ
G18
Z/X Y Z X Y
G19
Y/Z X Y Z X
Геометрические основы
1.3 Нулевые точки и исходные точки
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
23
1.3 Нулевые точки и исходные точки
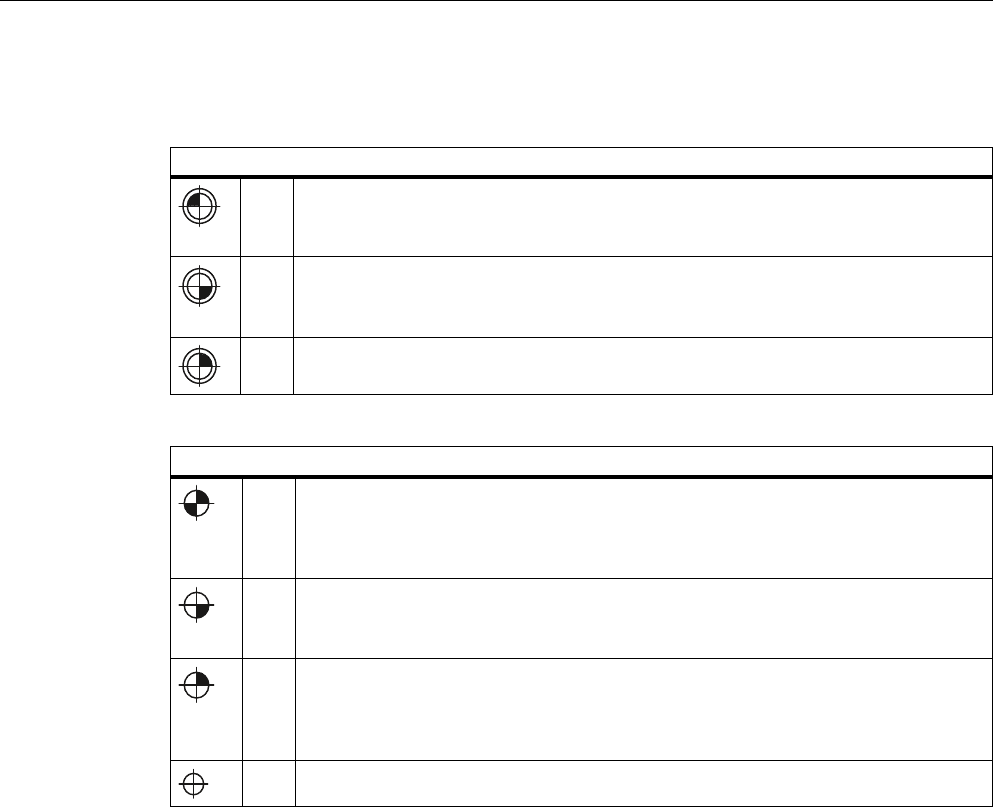
На станке с ЧПУ определены различные нулевые и исходные точки:
Нулевые точки
M Нулевая точка станка
С помощью нулевой точки станка определяется система координат станка
(MСS). К нулевой точке станка относятся все другие исходные точки.
W Нулевая точка детали = нулевая точка программы
Нулевая точка детали определяет систему координат детали относительно
нулевой точки станка.
A Точка упора
Может совпадать с нулевой точкой детали (только у токарных станков)
Исходные точки
R Референтная точка
Определенная кулачками и измерительной системой позиция. Расстояние до
нулевой точки станка M должно быть известным, чтобы позиция оси в этом
месте могла быть установлена точно на это значение.
B Стартовая точка
Может быть определена через программу. Здесь 1-ый инструмент начинает
обработку.
T Исходная точка инструментального суппорта
Находится на зажиме инструмента. Посредством ввода длин инструмента СЧПУ
вычисляет расстояние от острия инструмента до исходной точки
инструментального суппорта.
N Точка смены инструмента
Геометрические основы
1.3 Нулевые точки и исходные точки
Основы
24 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
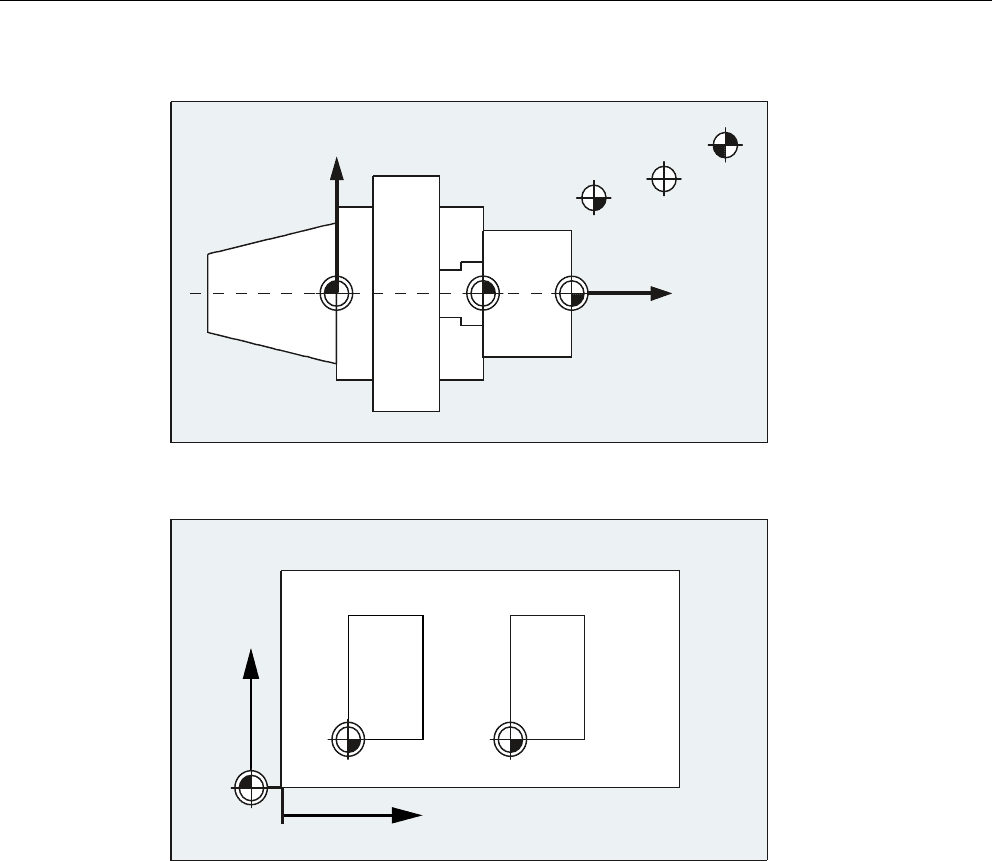
Нулевые и исходные точки при токарной обработке
Нулевые точки при фрезеровании
=
;
5
1
%
:$0
::
0
<
;
Геометрические основы
1.4 Системы координат
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
25
1.4 Системы координат
Различаются следующие системы координат:
• Система координат станка (MCS) [Страница 25] с нулевой точкой станка M
• Базовая кинематическая система (BKS) [Страница 28]
• Базовая система нулевой точки (BNS) [Страница 30]
• Настраиваемая система нулевой точки (ENS) [Страница 31]
• Система координат детали (WCS) [Страница 32] с нулевой точкой детали W
1.4.1 Система координат станка (MCS)
Система координат станка образуется из всех физически имеющихся осей станка.
В системе координат станка определяются референтные точки, точки смены
инструмента и паллет (фиксированные точки станка).
Если программирование осуществляется непосредственно в системе координат станка
(возможно для некоторых функций G), то обращение осуществляется напрямую к
физическим осям станка. Возможно имеющийся зажим детали при этом не
учитываются.
0
<P
;P
=P
Примечание
Если существуют различные системы координат станка (к примеру, 5-ти осевая
трансформация), то через внутреннюю трансформацию кинематика станка
отображается на систему координат, в которой осуществляется программирование.
Геометрические основы
1.4 Системы координат
Основы
26 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
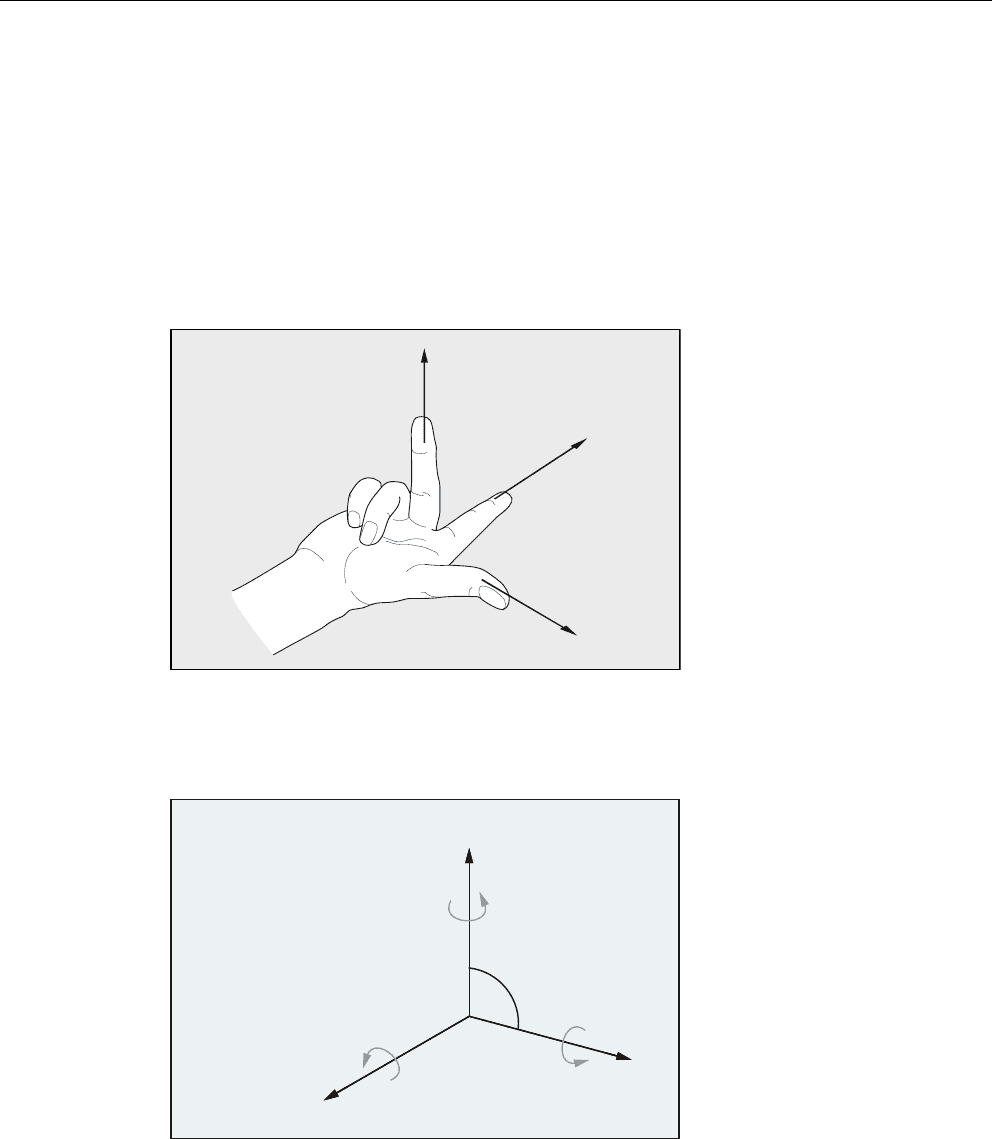
Правило правой руки
Положение системы координат относительно станка зависит от типа станка. Осевые
направления определяются по так называемому "Правилу правой руки" (по DIN 66217).
Если встать перед станком и средний палец правой руки направлен против
направления подачи главного шпинделя. Тогда:
• Большой палец обозначает направление +X
• Указательный палец - направление +Y
• Средний палец - направление +Z
Изображение 1-5 "Правило правой руки"
Вращения вокруг осей координат X, Y и Z обозначаются посредством A, B и C.
Направление вращения является положительным тогда, когда вращение выполняется
по часовой стрелке, если смотреть в положительном направлении оси координат:
;
<
=
̷͇͖͕͕͍͔͔͉͙͒͌͌͌͗͘͢͏͇͔͕͑͒ͣ
͚͔͇͚͕͋͗͊͋͗͊͌͘͏
̱͚͕͉͕͗͊͌͘͢͏
͉͇͇͗ͥ͠͠͏͉͕͚͌ͦ͑͗͊͘
;<=
$%&
;<=
&
$
%
r
;
=
<
Геометрические основы
1.4 Системы координат
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
27
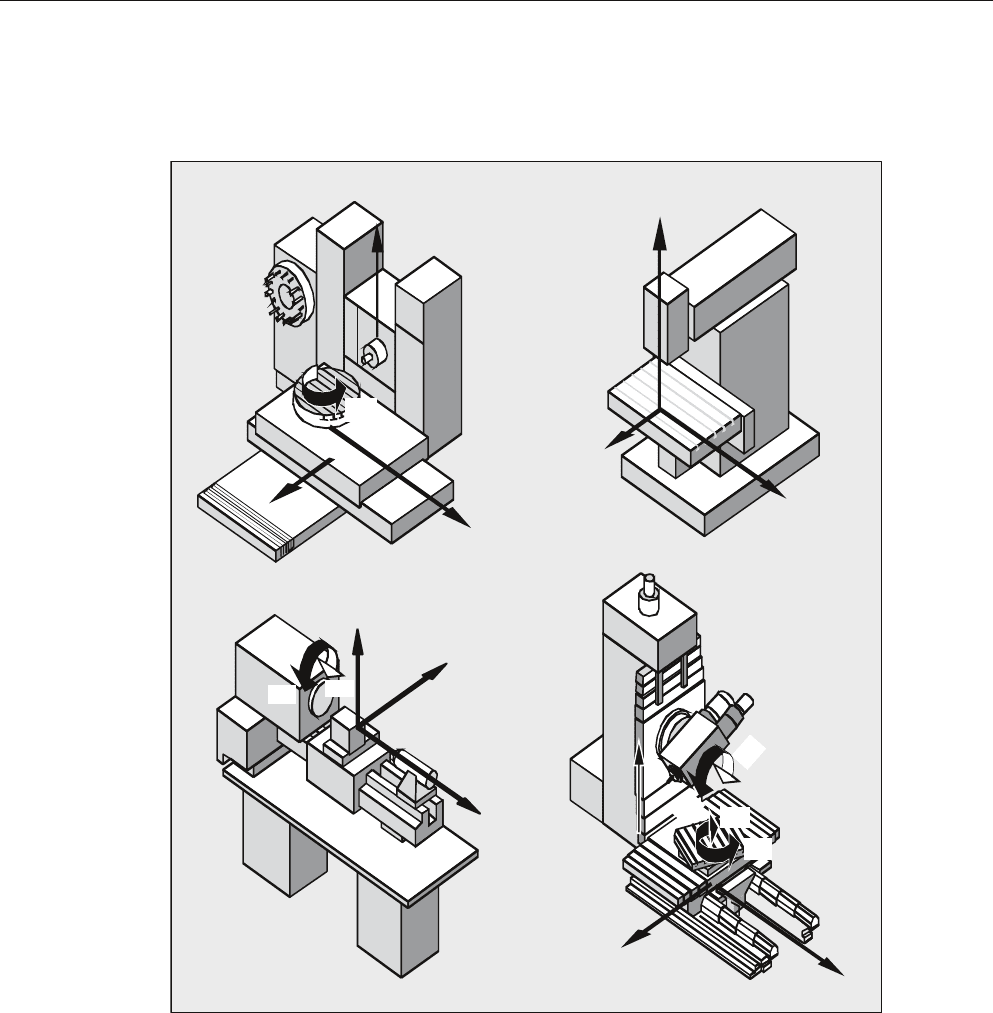
Положение системы координат у различных типов станков
Положение системы координат, получаемое из "правила правой руки", может иметь
различную ориентацию у различных типов станков. Ниже несколько примеров:
=
<
;
&
&
;
=
<
;
=
%
%
<
;
<
&
&
=
%
Геометрические основы
1.4 Системы координат
Основы
28 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
1.4.2 Базовая кинематическая система (BKS)
Базовая кинематическая система (BKS) состоит из трех расположенных под прямым
углом осей (геометрические оси), а также других осей (дополнительные оси) без
геометрической связи.
Станки без кинематической трансформации
BKS и MCS всегда совпадают в тех случаях, когда BKS может быть отображена на MCS
без кинематической трансформации (к примеру, 5-осевая трансформация, TRANSMIT/
TRACYL/TRAANG).
У таких станков имена осей станка и гео-осей могут быть идентичными.
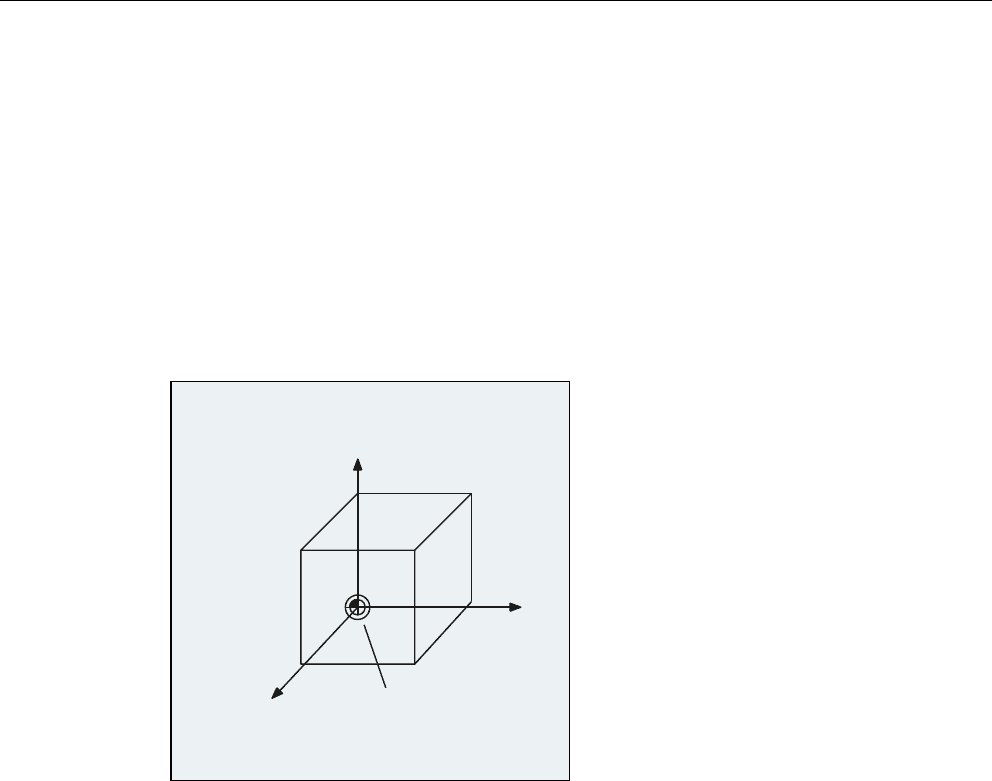
Изображение 1-6 MCS = BCS без кинематической трансформации
Станки без кинематической трансформации
BKS и MCS не совпадают в тех случаях, когда BKS отображается на MCS с
кинематической трансформацией (к примеру, 5-осевая трансформация, TRANSMIT/
TRACYL/TRAANG).
У таких станков имена осей станка и гео-осей должны быть различными.
̴͚͉͇͙͕͇͙͇͔͇͒͌ͦ͑͑͘͞
0&6 %.6
<
=
;
Геометрические основы
1.4 Системы координат
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
29
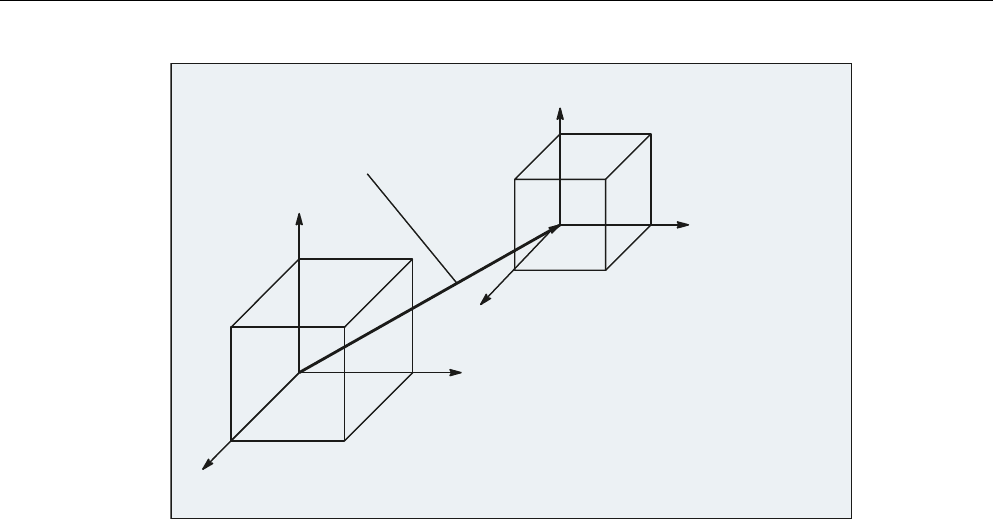
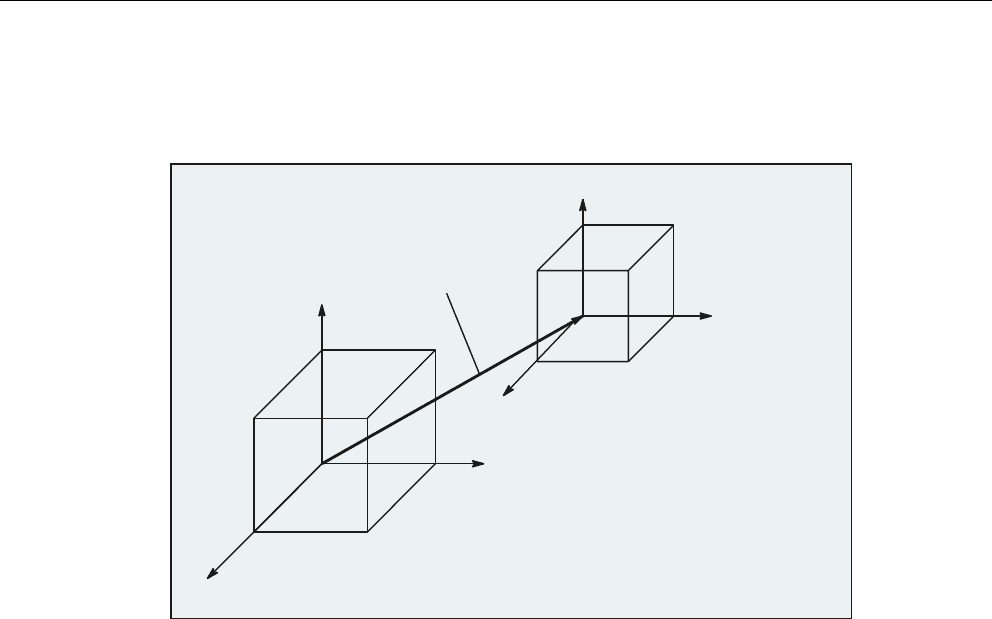
Изображение 1-7 Кинематическая трансформация между MСS и BKS
Кинематика станка
Деталь всегда программируется в двух- или трехмерной прямоугольной системе
координат (WСS). Но для изготовления этих деталей все чаще используются станки с
круговыми осями или расположенными не под прямым углом линейными осями. Для
преобразования запрограммированных в WСS координат (прямоугольных) в реальные
движения осей станка служит кинематическая трансформация.
Литература
Описание функций "Расширенные функции"; M1: Кинематическая трансформация
Описание функций "Специальные функции"; F2: Многоосевые трансформации
0&6
̨͇͎͕͉͇ͦ͑͏͔͓͇͙͌͏͇͌͑ͦ͘͞
͘͏͙͓͇͌͘%.6
̸͏͙͓͇͕͕͌͑͗͋͘͏͔͇͙͙͇͔͇͑͘0&6
̱͏͔͓͇͙͌͏͇͌͑ͦ͘͞
͙͇͔͕͓͇͗͛͗͘͝͏ͦ
%.6
%.6
%.6
0&6
0&6
<
;
=
;
=
<
Геометрические основы
1.4 Системы координат
Основы
30 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
1.4.3 Базовая система нулевой точки (BNS)
Базовая система нулевой точки (BNS) получается из базовой кинематической системы
посредством базового смещения.
Базовое смещение
Базовое смещение описывает преобразование координат между BKS и BNS. С его
помощью можно, к примеру, установить нулевую точку паллеты.
Базовое смещение состоит из:
• Внешнее смещение нулевой точки
•Смещение DRF
• Наложенное движение
• Связанные системные фреймы
• Связанные базовые фреймы
Литература
Описание функций "Основные функции"; Оси, системы координат, фреймы (K2)
̨͇͎͕͉͇ͦ͑͏͔͓͇͙͌͏͇͌͑ͦ͘͘͞͏͙͓͇͌͘%.6
̨͇͎͕͉͇ͦ͘͏͙͓͇͔͚͉͕͙͕͌͒͌͐͑͘͞͏
%16
̨͇͎͕͉͕͓͔͌͌͌͘͠͏͌
;
=
<
;
<
=