Руководство. Расширенное программирование, Справочник по программированию Sinumerik 840D (new)
Подождите немного. Документ загружается.

Трансформация координат (FRAMES)
5.2 Присвоение значение фрейм-переменным/фреймам
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
301
5.2.2 Чтение и изменение компонентов фрейма (TR, FI, RT, SC, MI)
Функция
Существует возможность обращения к отдельным данным фрейма, к примеру, к
определенному значению смещения или углу поворота. Эти значения могут изменяться
или присваиваться другой переменной.
Синтаксис
Значение
Диапазон значений для вращения RT
R10=$P_UIFR[$P_UIFNUM,X,RT]
Угол поворота RT вокруг оси X из актуального
действующего устанавливаемого смещения
нулевой точки $P_UIFRNUM должен быть
присвоен переменной R10.
R12=$P_UIFR[25,Z,TR]
Значение смещения TR в Z из блока данных
установленного фрейма Nr. 25 должно быть
присвоено переменной R12.
R15=$P_PFRAME[Y,TR]
Значение смещения TR в Y актуального
программируемого фрейма должно быть
присвоено переменной R15.
$P_PFRAME[X,TR]=25
Значение смещения TR в X актуального
программируемого фрейма должно быть
изменено. С этого момента действует X25.
$P_UIFRNUM С помощью этой переменной автоматически создается связь с
актуальным действительным устанавливаемым смещением нулевой
точки.
P_UIFR[n, ..., ...] Посредством указания номера фрейма n осуществляется
обращение к устанавливаемому фрейму Nr. n.
Указание компонента, который должен быть считан или изменен:
TR TR смещение
FI FI смещение точное
RT RT вращение
SC SC Scale изменение масштаба
MI MI отражение
X Y Z Дополнительно (см. примеры) указывается соответствующая ось
X, Y, Z.
Вращение вокруг 1-ой гео-оси: -180° до +180°
Вращение вокруг 2-ой гео-оси: -90° до +90°
Вращение вокруг 3-ой гео-оси: -180° до +180°
Трансформация координат (FRAMES)
5.2 Присвоение значение фрейм-переменным/фреймам
Расширенное программирование
302 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
Описание
Вызов фрейма
Через указание системной переменной $P_UIFRNUM можно напрямую обращаться к
актуальному, установленному с помощью $P_UIFR или G54, G55, … смещению нулевой
точки
($P_UIFRNUM содержит номер актуального установленного фрейма).
Все другие сохраненные устанавливаемые фреймы $P_UIFR вызываются через
указание соответствующего номера $P_UIFR[n].
Для предопределенных фрейм-переменных и определенных пользователем фреймов
указывается имя, к примеру, $P_IFRAME.
Вызов данных
В квадратных скобках стоят имя оси и компоненты фрейма значения, к которому
выполняется обращение или которое должно быть изменено, к примеру, [X, RT] или [Z,
MI].
5.2.3 Соединение целых фреймов
Функция
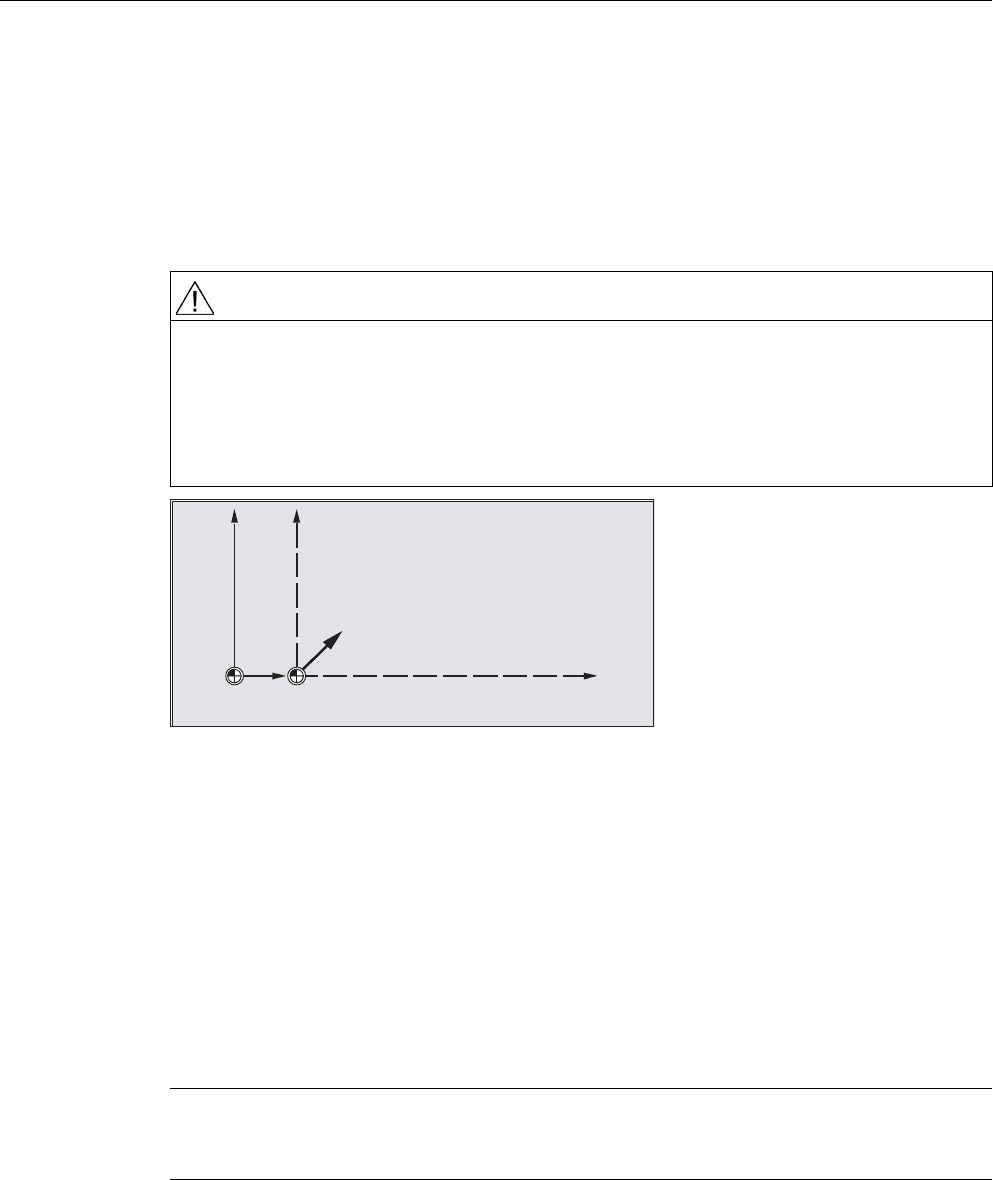
В программе ЧПУ возможно присвоение целого фрейма другому фрейму или
соединение фреймов друг с другом.
Организации фреймов подходят, к примеру, для описания нескольких деталей,
расположенных на одной палете, которые должны быть обработаны в течение одного
технологического процесса.
Для описания задач палет компоненты фрейма могут содержать, к примеру, только
определенные частные значения, посредством соединения которых создаются
различные нулевые точки детали.
*
=
;
<
Трансформация координат (FRAMES)
5.2 Присвоение значение фрейм-переменным/фреймам
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
303
Синтаксис
Присвоение фреймов
Цепочки фреймов
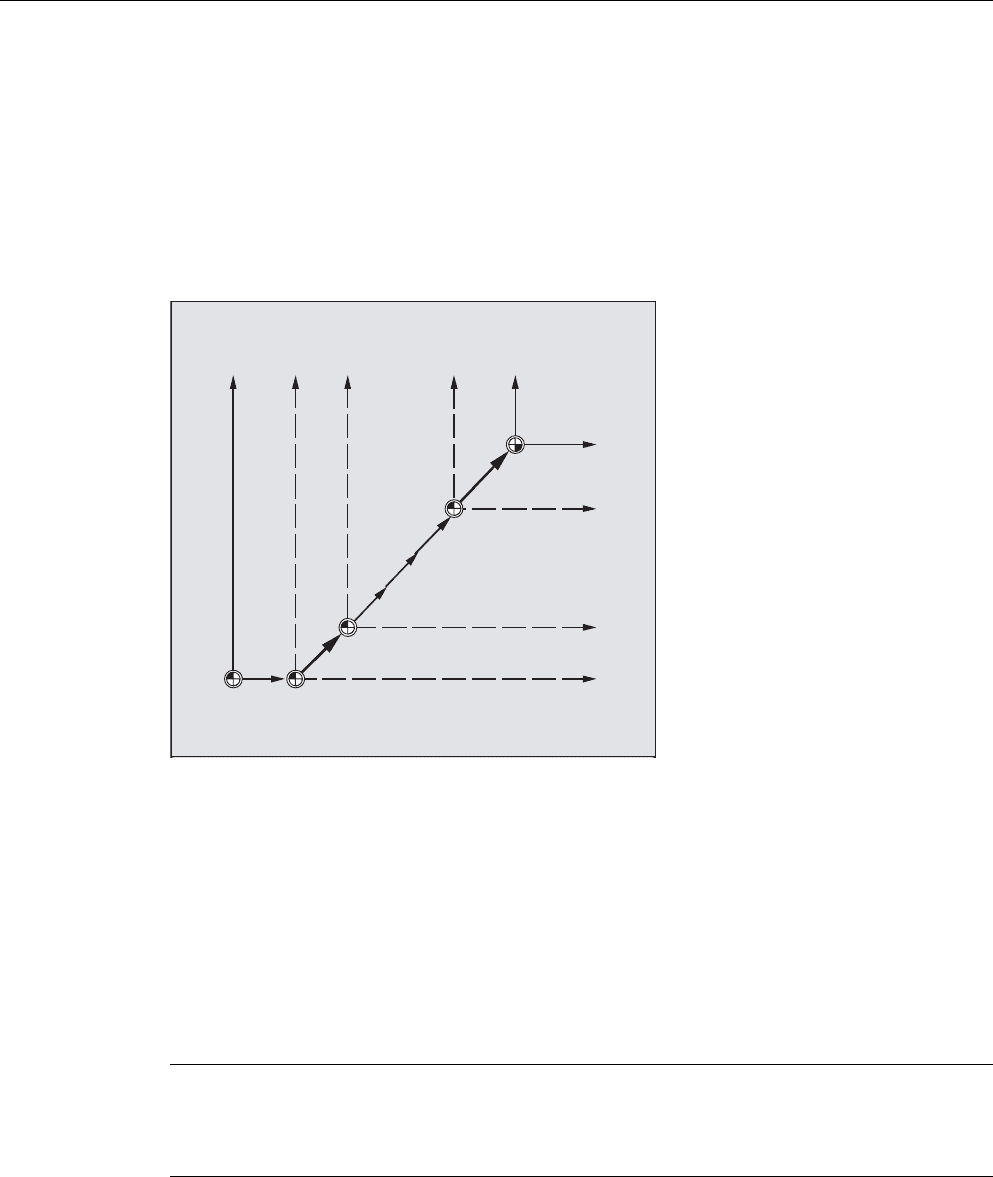
Фреймы соединяются друг с другом в запрограммированной последовательности,
компоненты фрейма, к примеру, смещения, вращения и т.д. выполняются друг за
другом аддитивно.
DEF FRAME EINSTELLUNG1
EINSTELLUNG1=CTRANS(X,10)
$P_PFRAME=EINSTELLUNG1
DEF FRAME EINSTELLUNG4
EINSTELLUNG4=$P_PFRAME
$P_PFRAME=EINSTELLUNG4
Актуальному программируемому фрейму
присваиваются значения
самостоятельно определенного фрейма
EINSTELLUNG1.
Актуальный программируемый фрейм
буферизируется и после при
необходимости снова открывается.
$P_IFRAME=$P_UIFR[15]:$P_UIFR[16]
$P_UIFR[3]=$P_UIFR[4]:$P_UIFR[5]
$P_UIFR[15] содержит, к примеру,
данные для смещений нулевой
точки. После –в продолжении –
обрабатываются данные
$P_UIFR[16], к примеру, данные для
вращений.
Устанавливаемый фрейм 3
создается посредством соединения
устанавливаемых фреймов 4 и 5.
Примечание
Учитывать, что фреймы посредством связывающего оператора "двоеточие" : должны
быть соединены друг с другом.

Трансформация координат (FRAMES)
5.2 Присвоение значение фрейм-переменным/фреймам
Расширенное программирование
304 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
5.2.4 Определение новых фреймов (DEF FRAME)
Функция
Наряду с уже описанными, предопределенными, устанавливаемыми фреймами
существует возможность создания новых фреймов. При этом речь идет о переменной
типа FRAME, которая определяется с произвольным присвоением имени.
С помощью функций CTRANS, CROT, CSCALE, CMIRROR фреймам в программе ЧПУ
могут быть присвоены значения.
Синтаксис
DEF FRAME PALETTE1
PALETTE1=CTRANS(…):CROT(…)…
Значение
DEF FRAME
Создание нового фрейма.
PALETTE1
Имя нового фрейма
=CTRANS(...):
CROT(...)...
Присвоение значений возможным функциям
Трансформация координат (FRAMES)
5.3 Грубое и точное смещение (CFINE; CTRANS)
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
305
5.3 Грубое и точное смещение (CFINE; CTRANS)
Функция
Точное смещение
С помощью команды CFINE(X, ...,Y ...) можно запрограммировать точное
смещение базового фрейма и всех устанавливаемых фреймов.
Точное смещение возможно только при MD18600 $MN_MM_FRAME_FINE_TRANS=1.
Грубое смещение
С помощью CTRANS(...) определяется грубое смещение.
Грубое и точное смещение складываются в общее смещение.
Синтаксис
Доступ к отдельным компонентам точного смещения выполняется через указание
компонента FI (Translation Fine).
̪͚͈͕͓͔͗͌͌͌͘͠͏͌
̹͕͔͕͓͔͌͌͌͘͞͠͏͌
̩͇͔͗͌͠͏͌
̳͇͙͇͈͘͟͏͕͉͇͔͗͏͌
̵͙͇͍͔͗͌͏͌
̸͙͚͙͚͇͓͇͙͕͔͓͓͔͗͑͗͛͗͌͐͌͌͘͘͢͞͠͏͓͌
$P_UBFR=CTRANS(x, 10) : CFINE(x, 0.1)
: CROT(x, 45)
;соединение смещения,
;точного смещения и вращения
$P_UIFR[1]=CFINE(x, 0.5 y, 1.0, z,
0.1)
;весь фреймы переписывается с
CFINE
;вкл. грубое смещение

Трансформация координат (FRAMES)
5.3 Грубое и точное смещение (CFINE; CTRANS)
Расширенное программирование
306 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
Значение
Изготовитель станка
С помощью MD18600 $MN_ MM_FRAME_FINE_TRANS точное смещение может быть
сконфигурировано в следующих вариантах:
0:
Точное смещение не может быть введено или запрограммировано. G58 и G59
невозможны.
1:
Точное смещение для устанавливаемых фреймов, базовых фреймов,
программируемых фреймов, G58 и G59 может быть введено или запрограммировано.
Описание
Измененное через панель оператора HMI точное смещение становится активным
только после активации соответствующего фрейма, т.е. активация осуществляется
через G500, G54...G599. Активированное точное смещение фрейма остается активным
до тех пор, пока активен фрейм.
Программируемый фрейм не имеет доли точного смещения. Если программируемому
фрейму присваивается фрейм с точным смещением, то его общее смещение
образуется из суммы грубого и точного смещения. При чтении программируемого
фрейма точное смещение всегда равно нулю.
DEF REAL FINEX
;определение переменной FINEX
FINEX=$P_UIFR[$P_UIFNUM, x, FI]
;выгрузка точного смещения
;через переменную FINEX
FINEX=$P_UIFR[3, x, FI]$P
;выгрузка точного смещения
;оси X в 3-ем фрейме
;через переменную FINEX
CFINE(x, значение, y,
значение, z, значение )
Точное смещение для нескольких осей. Аддитивное
смещение (Translatation).
CTRANS(x, значение, y,
значение, z, значение )
Грубое смещение для нескольких осей. Абсолютное
смещение (Translatation).
x y z
Смещение нулевой точки осей (макс. 8)
Значение
Доля смещения
Трансформация координат (FRAMES)
5.4 Внешнее смещение нулевой точки
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
307
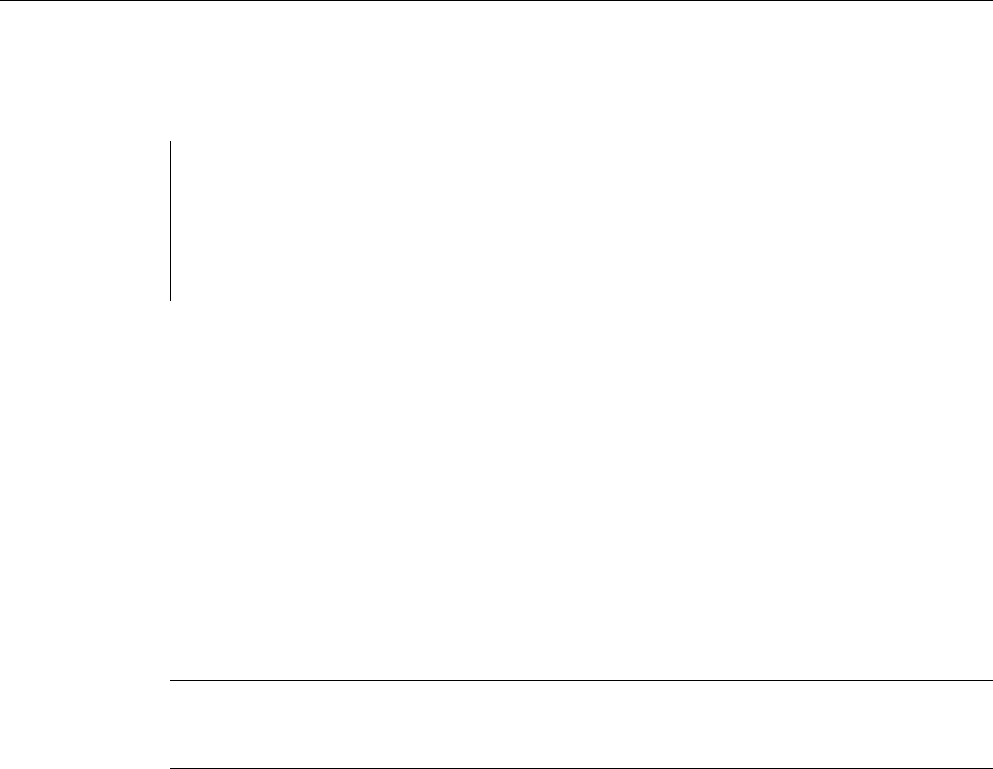
5.4 Внешнее смещение нулевой точки
Функция
Здесь существует дополнительная возможность смещения нулевой точки между
базовой кинематической системой и системой координат детали.
При внешнем смещении нулевой точки могут программироваться только линейные
смещения.
Программирование
Программирование значений смещения, $AA_ETRANS осуществляется через
присвоение значений спец. для оси системным переменным.
Присвоение значения смещения
$AA_ETRANS[ось]=RI
RI это R-переменная типа REAL, содержащая новое значение.
Внешнее смещение, как правило, не указывается в программе обработки детали, а
устанавливается с PLC.
̨͇͎͕͉͓͐͛͗͌͐͢
̩͔͔͓͔͌͌͌͌͌͘͟͠͏͔͚͉͕͙͕͌͒͌͐͑͞͏
̸͓͔͌͌͠͏͌'5)
̱͏͔͓͇͙͌͏͇͙͇͔͕͓͇͌͑ͦ͗͛͗͘͘͞͝͏ͦ
̸͓͔͌͌͠͏͌3UHVHW
<
0.6
<
0.6
;
0.6
<
%.6
;
%.6
<
%16
;
%16
<
(16
;
(16
**
Примечание
Записанное в программе обработки детали значение начинает действовать только при
установке соответствующего сигнала на интерфейсе VDI
(интерфейс NCU-PLC).
Трансформация координат (FRAMES)
5.5 Смещение Preset (PRESETON)
Расширенное программирование
308 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
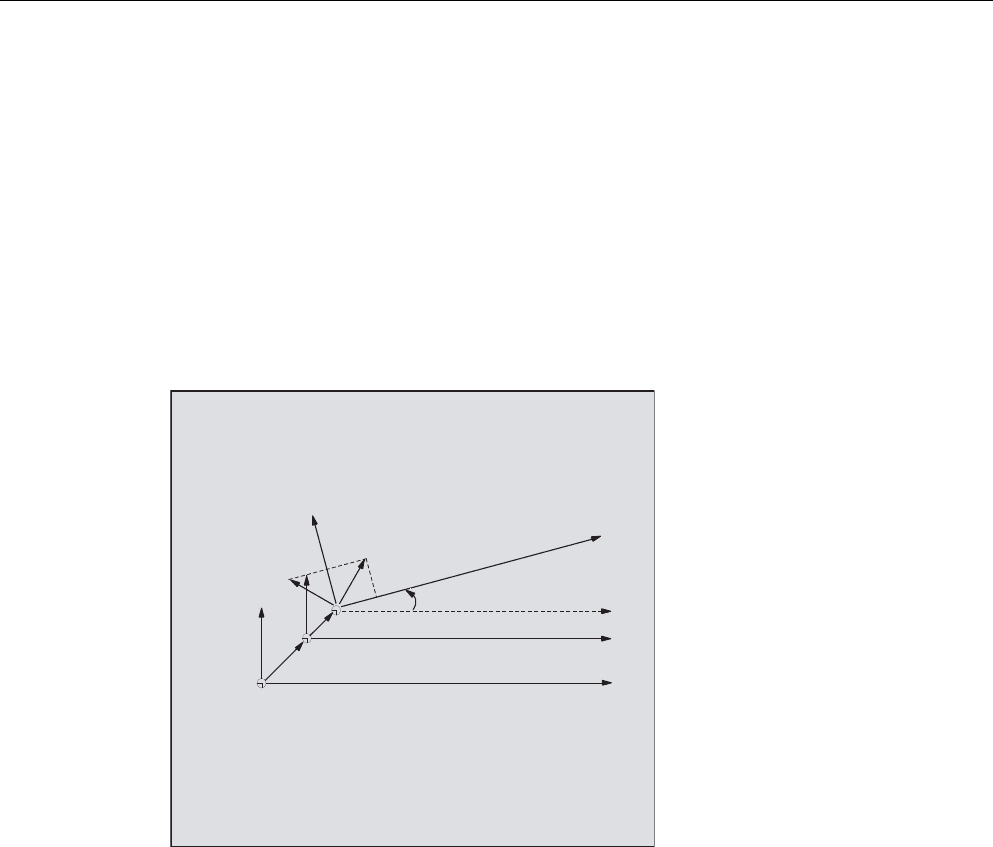
5.5 Смещение Preset (PRESETON)
Функция
Для специальных задач может потребоваться с помощью PRESETON присвоить уже
реферированной оси станка новое фактическое значение. Это соответствует
смещению нулевой точки в системе координат станка.
Синтаксис
PRESETON(<ось>, <значение>, ...)
Значение
ВНИМАНИЕ
После PRESETON ось станка в состоянии "не реферирована". Поэтому рекомендуется
использовать функцию только для осей станка без обязательной референтной точки.
Для восстановления первоначальной системы координат станка необходимо заново
реферировать ось станка, к примеру, с G74 (реферирование).
Литература: Руководство по программированию "Основы", Дополнительные команды,
Реферирование (G74)
̱͏͔͓͇͙͌͏͇͙͇͔͕͓͇͌͑ͦ͗͛͗͘͘͞͝͏ͦ
̸͓͔͌͌͠͏͌3UHVHW
0.6
;
0.6
<
0.6
<
PRESETON
Установка фактического значения
<ось>
Идентификатор оси станка
<значение>
Новое фактическое значение оси станка в системе
координат станка
Примечание
Установка фактического значения через синхронные действия должна выполняться
только с кодовым словом WHEN или EVERY.

Трансформация координат (FRAMES)
5.5 Смещение Preset (PRESETON)
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
309
Пример
Гео-ось: A, соответствующая ось станка: X1
Программный код Комментарий
N10 G0 A100 ; Ось A движется на позицию 100
N20 PRESETON(X1,50) ; Ось станка X1 получает на позиции 100 новое
фактическое значение 50 => новая индикация
фактического значения:
- ось X1, MСS: 50
- ось A, WСS: 50
N30 A100 ; Ось A движется 50 мм на позицию 100

Трансформация координат (FRAMES)
5.6 Вычисление фрейма из 3 точек измерения в пространстве (MEAFRAME)
Расширенное программирование
310 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
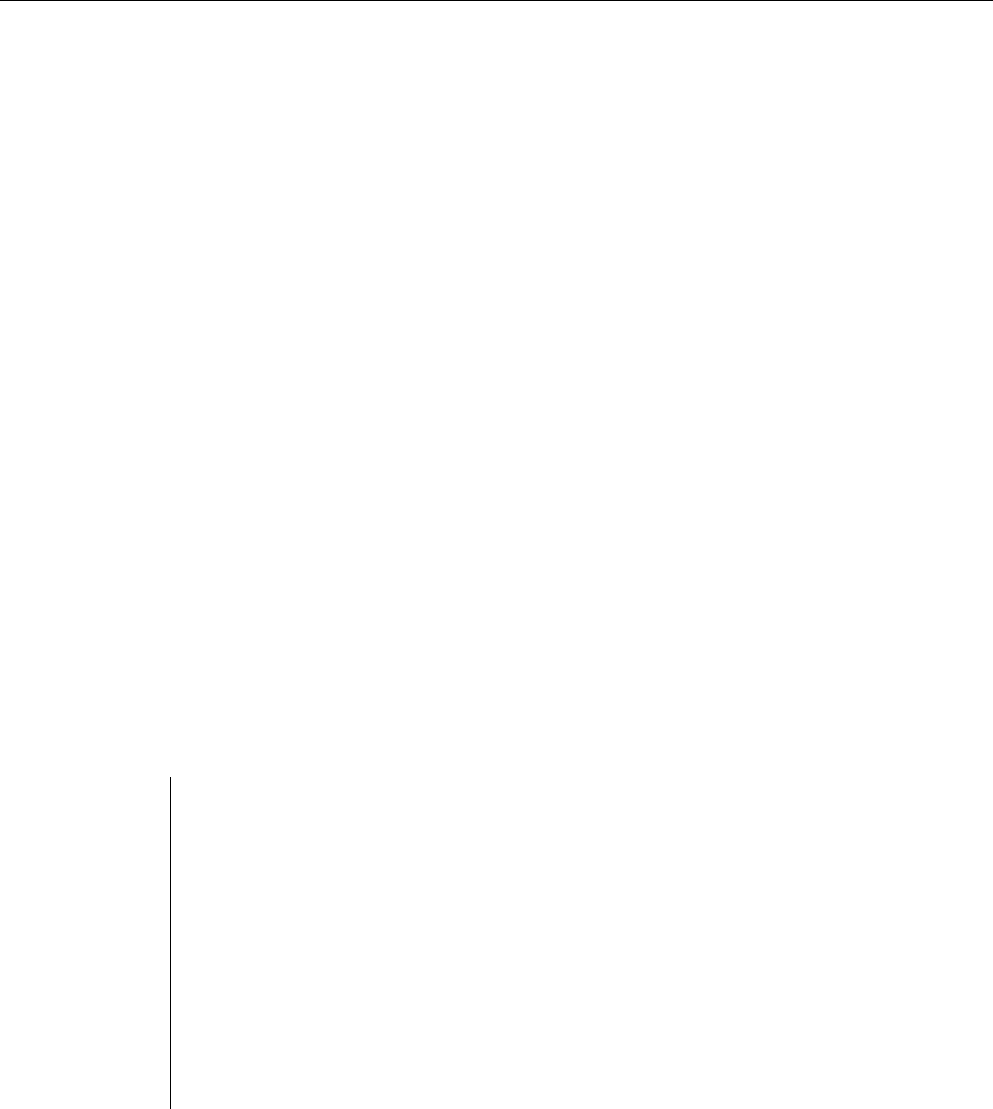
5.6 Вычисление фрейма из 3 точек измерения в пространстве
(MEAFRAME)
Функция
MEAFRAME это расширение языка 840D для поддержки циклов измерения.
Функция MEAFRAME вычисляет фрейм из трех идеальных и сопряженно измеренных
точек.
Если деталь позиционируется для обработки, то ее позиция относительно декартовой
системы координат станка по умолчанию как смещена, так и повернута по отношению к
ее идеальной позиции. Для точной обработки или измерения необходима либо
дорогостоящая физическая юстировка, либо изменение движений в программе
обработки детали.
Фрейм может быть определен через сканирование трех точек в пространстве,
идеальные позиции которых известны. Сканирование выполняется посредством
контактного или оптического сенсора, который касается точно зафиксированных на
несущей пластине отверстий или измерительных сфер.
Синтаксис
MEAFRAME IDEAL_POINT,MEAS_POINT,FIT_QUALITY)
Значение
MEAFRAME
Вычисление фрейма из 3 точек измерения в пространстве
IDEAL_POINT
мерное поле Real, содержащее три координаты идеальных точек
MEAS_POINT
мерное поле Real, содержащее три координаты измеренных точек
FIT_QUALITY
Переменная Real,
-1:
-2:
-4:
положительное
значение:
возвращающая следующую информацию:
Идеальные точки располагаются практически
на одной прямой: вычисление фрейма
невозможно. Возвращенная фрейм-
переменная содержит нейтральный фрейм.
Точки измерения располагаются практически
на одной прямой: вычисление фрейма
невозможно. Возвращенная фрейм-
переменная содержит нейтральный фрейм.
Вычисление матрицы вращения не удалось
по иной причине.
Сумма искажений (расстояния между
точками), необходимая для перевода
измеренного треугольника в конгруэнтный
идеальному треугольник.