Samarskii A.A., Vabishchevich P.N. Numerical Methods for Solving Inverse Problems of Mathematical Physics
Подождите немного. Документ загружается.


296 Chapter 7 Evolutionary inverse problems
COMMON / CONTROL / IREPT, NITER
C
C PARAMETERS:
C
C X1L, X2L - COORDINATES OF THE LEFT CORNER;
C X1R, X2R - COORDINATES OF THE RIGHT CIRNER;
C N1, N2 - NUMBER OF NODES IN THE SPATIAL GRID;
C H1, H2 - MESH SIZES OVER SPACE;
C TAU - TIME STEP;
C DELTA - INPUT-DATA INACCURACY LEVEL;
C U0(N1,N2) - INITIAL CONDITION TO BE RECONSTRUCTED;
C UT(N1,N2) - END-TIME SOLUTION IN THE DIRECT PROBLEM;
C UTD(N1,N2)- DISTURBED DIRECT-PROBLEM SOLUTION;
C U(N1,N2) - APPROXIMATE SOLUTION IN THE INVERSE PROBLEM;
C EPSR - RELATIVE INACCURACY OF THE DIFFERENCE SOLUTION;
C EPSA - ABSOLUTE INACCURACY OF THE DIFFERENCE SOLUTION;
C
C EQUIVALENCE ( A(1), A0 ),
C
*
( A(N+1), A1 ),
C
*
( A(2
*
N+1), A2 ),
C
*
( A(9
*
N+1), F ),
C
*
( A(10
*
N+1), U0 ),
C
*
( A(11
*
N+1), UT ),
C
*
( A(12
*
N+1), UTD ),
C
*
( A(13
*
N+1), U ),
C
*
( A(14
*
N+1), V ),
C
*
( A(15
*
N+1), R ),
C
*
( A(16
*
N+1), BW )
C
X1L = 0.D0
X1R = 1.D0
X2L = 0.D0
X2R = 1.D0
TMAX = 0.025D0
PI = 3.1415926D0
EPSR = 1.D-5
EPSA = 1.D-8
C
OPEN (01, FILE =’RESULT.DAT’) ! FILE TO STORE THE CALCULATED DATA
C
C GRID
C
H1 = (X1R-X1L) / (N1-1)
H2 = (X2R-X2L) / (N2-1)
TAU = TMAX / (M-1)
DOI=1,N1
X1(I) = X1L + (I-1)
*
H1
END DO
DOJ=1,N2
X2(J) = X2L + (J-1)
*
H2
END DO
C
N=N1
*
N2
DOI=1,17
*
N
A(I) = 0.0
END DO
C
C DIRECT PROBLEM
C PURELY IMPLICIT DIFFERENCE SCHEME
C

Section 7.3 Iterative solution of retrospective problems 297
C INITIAL CONDITION
C
T = 0.D0
CALL INIT (A(10
*
N+1), X1, X2, N1, N2)
DOK=2,M
C
C DIFFERENCE-SCHEME COEFFICIENTS IN THE DIRECT PROBLEM
C
CALL FDST (A(1), A(N+1), A(2
*
N+1), A(9
*
N+1), A(10
*
N+1),
+ H1, H2, N1, N2, TAU)
C
C SOLUTION OF THE DIFFERENCE PROBLEM
C
IDEFAULT(1) = 0
IREPT = 0
CALL SBAND5 (N, N1, A(1), A(10
*
N+1), A(9
*
N+1), EPSR, EPSA)
END DO
C
C DISTURBING OF MEASURED QUANTITIES
C
DOI=1,N
A(11
*
N+I) = A(10
*
N+I)
A(12
*
N+I) = A(11
*
N+I) + 2.
*
DELTA
*
(RAND(0)-0.5)
END DO
C
C INVERSE PROBLEM
C ITERATION METHOD
C
IT=0
C
C STARTING APPROXIMATION
C
DOI=1,N
A(14
*
N+I) = 0.D0
END DO
C
100IT=IT+1
C
C DIRECT PROBLEM
C
T = 0.D0
C
C INITIAL CONDITION
C
DOI=1,N
A(10
*
N+I) = A(14
*
N+I)
END DO
DOK=2,M
C
C DIFFERENCE-SCHEME COEFFICIENTS IN THE DIRECT PROBLEM
C
CALL FDST (A(1), A(N+1), A(2
*
N+1), A(9
*
N+1), A(10
*
N+1),
+ H1, H2, N1, N2, TAU)
C
C SOLUTION OF THE DIFFERENCE PROBLEM
C
IDEFAULT(1) = 0
IREPT = 0
CALL SBAND5 (N, N1, A(1), A(10
*
N+1), A(9
*
N+1), EPSR, EPSA)
298 Chapter 7 Evolutionary inverse problems
END DO
C
C DISCREPANCY
C
DOI=1,N
A(15
*
N+I) = A(10
*
N+I) - A(12
*
N+I)
END DO
C
C CORRECTION
C
C DIFFERENCE-SCHEME COEFFICIENTS IN THE DIRECT PROBLEM
C
CALL FDSB (A(1), A(N+1), A(2
*
N+1), A(9
*
N+1), A(15
*
N+1),
+ H1, H2, N1, N2)
C
C SOLUTION OF THE DIFFERENCE PROBLEM
C
IDEFAULT(1) = 0
IREPT = 0
CALL SBAND5 (N, N1, A(1), A(13
*
N+1), A(9
*
N+1), EPSR, EPSA)
C
C ITERATION PARAMETERS
C
T = 0.D0
C
C INITIAL CONDITIONS
C
DOI=1,N
A(10
*
N+I) = A(13
*
N+I)
END DO
DOK=2,M
C
C DIFFERENCE-SCHEME COEFFICIENTS IN THE DIRECT PROBLEM
C
CALL FDST (A(1), A(N+1), A(2
*
N+1), A(9
*
N+1), A(10
*
N+1),
+ H1, H2, N1, N2, TAU)
C
C SOLUTION OF THE DIFFERENCE PROBLEM
C
IDEFAULT(1) = 0
IREPT = 0
CALL SBAND5 (N, N1, A(1), A(10
*
N+1), A(9
*
N+1), EPSR, EPSA)
END DO
C
C METHOD OF MINIMAL DISCREPANCIES
C
C DIFFERENCE-SCHEME COEFFICIENTS IN THE DIRECT PROBLEM
C
CALL FDSB (A(1), A(N+1), A(2
*
N+1), A(9
*
N+1), A(10
*
N+1),
+ H1, H2, N1, N2)
C
C SOLUTION OF THE DIFFERENCE PROBLEM
C
IDEFAULT(1) = 0
IREPT = 0
CALL SBAND5 (N, N1, A(1), A(16
*
N+1), A(9
*
N+1), EPSR, EPSA)
C
SUM = 0.D0
SUM1 = 0.D0
DOI=1,N

Section 7.3 Iterative solution of retrospective problems 299
SUM = SUM + A(10
*
N+I)
*
A(13
*
N+I)
SUM1 = SUM1 + A(16
*
N+I)
*
A(10
*
N+I)
END DO
SS = SUM / SUM1
C
C NEXT APPROXIMATION
C
DOI=1,N
A(14
*
N+I) = A(14
*
N+I) - SS
*
A(13
*
N+I)
END DO
C
C EXIT FROM THE ITERATIVE PROCESS BY THE DISCREPANCY CRITERION
C
SUM = 0.D0
DOI=1,N
SUM = SUM + A(15
*
N+I)
**
2
*
H1
*
H2
END DO
SL2 = DSQRT(SUM)
IF ( SL2.GT.DELTA ) GO TO 100
C
C SOLUTION
C
DOI=1,N
A(13
*
N+I) = A(14
*
N+I)
END DO
WRITE ( 01,
*
) (A(11
*
N+I), I=1,N)
WRITE ( 01,
*
) (A(13
*
N+I), I=1,N)
CLOSE (01)
STOP
END
C
SUBROUTINE INIT (U, X1, X2, N1, N2)
C
C INITIAL CONDITION
C
IMPLICIT REAL
*
8 ( A-H, O-Z )
DIMENSION U(N1,N2), X1(N1), X2(N2)
DOI=1,N1
DOJ=1,N2
U(I,J) = 0.D0
IF ((X1(I)-0.6D0)
**
2 + (X2(J)-0.6D0)
**
2.LE.0.04D0)
+ U(I,J) = 1.D0
END DO
END DO
C
RETURN
END
C
SUBROUTINE FDST (A0, A1, A2, F, U, H1, H2, N1, N2, TAU)
C
C GENERATION OF DIFFERENCE-SCHEME COEFFICIENTS
C FOR THE PARABOLIC EQUATION WITH CONSTANT COEFFICIENTS
C IN THE CASE OF PURELY IMPLICIT SCHEME
C
IMPLICIT REAL
*
8 ( A-H, O-Z )
DIMENSION A0(N1,N2), A1(N1,N2), A2(N1,N2), F(N1,N2), U(N1,N2)
C
DOJ=2,N2-1
DOI=2,N1-1
A1(I-1,J) = 1.D0/(H1
*
H1)

300 Chapter 7 Evolutionary inverse problems
A1(I,J) = 1.D0/(H1
*
H1)
A2(I,J-1) = 1.D0/(H2
*
H2)
A2(I,J) = 1.D0/(H2
*
H2)
A0(I,J) = A1(I,J) + A1(I-1,J) + A2(I,J) + A2(I,J-1)
+ + 1.D0/TAU
F(I,J) = U(I,J)/TAU
END DO
END DO
C
C FIRST-KIND HOMOGENEOUS BOUNDARY CONDITION
C
DOJ=2,N2-1
A0(1,J) = 1.D0
A1(1,J) = 0.D0
A2(1,J) = 0.D0
F(1,J) = 0.D0
END DO
C
DOJ=2,N2-1
A0(N1,J) = 1.D0
A1(N1-1,J) = 0.D0
A1(N1,J) = 0.D0
A2(N1,J) = 0.D0
F(N1,J) = 0.D0
END DO
C
DOI=2,N1-1
A0(I,1) = 1.D0
A1(I,1) = 0.D0
A2(I,1) = 0.D0
F(I,1) = 0.D0
END DO
C
DOI=2,N1-1
A0(I,N2) = 1.D0
A1(I,N2) = 0.D0
A2(I,N2) = 0.D0
A2(I,N2-1) = 0.D0
F(I,N2) = 0.D0
END DO
C
A0(1,1) = 1.D0
A1(1,1) = 0.D0
A2(1,1) = 0.D0
F(1,1) = 0.D0
C
A0(N1,1) = 1.D0
A2(N1,1) = 0.D0
F(N1,1) = 0.D0
C
A0(1,N2) = 1.D0
A1(1,N2) = 0.D0
F(1,N2) = 0.D0
C
A0(N1,N2) = 1.D0
F(N1,N2) = 0.D0
C
RETURN
END
C

Section 7.3 Iterative solution of retrospective problems 301
SUBROUTINE FDSB (A0, A1, A2, F, U, H1, H2, N1, N2)
C
C GENERATION OF DIFFERENCE-SCHEME COEFFICIENTS
C FOR THE DIFFERENCE ELLIPTIC EQUATION
C
IMPLICIT REAL
*
8 ( A-H, O-Z )
DIMENSION A0(N1,N2), A1(N1,N2), A2(N1,N2), F(N1,N2), U(N1,N2)
C
DOJ=2,N2-1
DOI=2,N1-1
A1(I-1,J) = 1.D0/(H1
*
H1)
A1(I,J) = 1.D0/(H1
*
H1)
A2(I,J-1) = 1.D0/(H2
*
H2)
A2(I,J) = 1.D0/(H2
*
H2)
A0(I,J) = A1(I,J) + A1(I-1,J) + A2(I,J) + A2(I,J-1)
+ + 1.D0
F(I,J) = U(I,J)
END DO
END DO
C
C FIRST-KIND HOMOGENEOUS BOUNDARY CONDITIONS
C
DOJ=2,N2-1
A0(1,J) = 1.D0
A1(1,J) = 0.D0
A2(1,J) = 0.D0
F(1,J) = 0.D0
END DO
C
DOJ=2,N2-1
A0(N1,J) = 1.D0
A1(N1-1,J) = 0.D0
A1(N1,J) = 0.D0
A2(N1,J) = 0.D0
F(N1,J) = 0.D0
END DO
C
DOI=2,N1-1
A0(I,1) = 1.D0
A1(I,1) = 0.D0
A2(I,1) = 0.D0
F(I,1) = 0.D0
END DO
C
DOI=2,N1-1
A0(I,N2) = 1.D0
A1(I,N2) = 0.D0
A2(I,N2) = 0.D0
A2(I,N2-1) = 0.D0
F(I,N2) = 0.D0
END DO
C
A0(1,1) = 1.D0
A1(1,1) = 0.D0
A2(1,1) = 0.D0
F(1,1) = 0.D0
C
A0(N1,1) = 1.D0
A2(N1,1) = 0.D0
F(N1,1) = 0.D0
302 Chapter 7 Evolutionary inverse problems
C
A0(1,N2) = 1.D0
A1(1,N2) = 0.D0
F(1,N2) = 0.D0
C
A0(N1,N2) = 1.D0
F(N1,N2) = 0.D0
C
RETURN
END
In the subroutine FDST, coefficients of the difference elliptic problem are generated
for the problem to be solved at the next time step. In the subroutine FDSB, coefficients
of the difference elliptic operator B in the iterative process (7.179) are generated, so
that
By =−
2
β=1
y
¯x
β
x
β
+ y.
Difference elliptic problems are solved in the subroutine SBAND5.
7.3.5 Computational experiments
Like in the case of regularized difference schemes intended for approximate solution
of inverted-time problems, a uniform grid with h
1
= 0.02 and h
2
= 0.02 for the
model problem with k(x) = 1 in unit square was used. In the framework of a quasi-
real experiment, the direct problem with T = 0.025 is solved using a time grid with
τ = 0.00025. A purely implicit difference scheme (σ = 1) was employed. Again,
in the direct problem the initial condition (the exact end-time solution of the inverse
problem) is given by
u
0
(x, 0) =
1,(x
1
− 0.6)
2
+ (x
2
− 0.6)
2
≤ 0.04,
0,(x
1
− 0.6)
2
+ (x
2
− 0.6)
2
> 0.04.
The end-time solution of the direct problem is shown in Figure 7.5.
To illustrate the capability of the adopted scheme in reconstructing a piecewise-
discontinuous initial condition, here we present computational data obtained with un-
perturbed input data (the difference solution of the direct problem at t = T ). The
iterative process was terminated when the difference r
k
= Av
k
− ϕ attained the es-
timate r
k
≤ε. Approximate solutions obtained with ε = 0.001 and ε = 0.0001
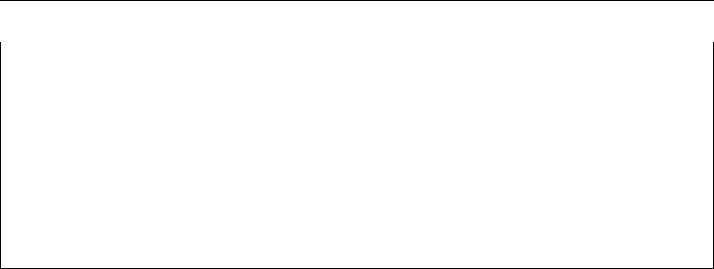
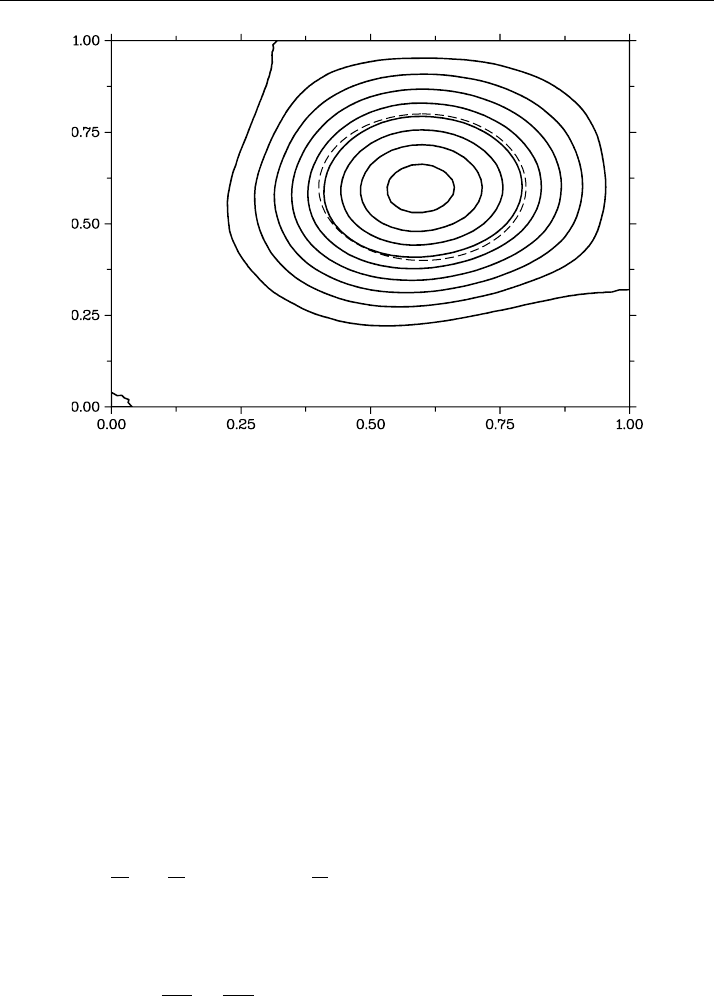
are shown in Figures 7.9 and 7.10, respectively (in the figures, contour lines with the
step size u = 0.05 are plotted). A substantial (tenfold) change in the solution accu-
racy for the inverse problem results in slight refinement of the approximate solution.
In the case of interest, we cannot expect that a more accurate reconstruction of the
piecewise-discontinuous initial condition can be achieved.
Section 7.3 Iterative solution of retrospective problems 303
Figure 7.9 Inverse-problem solution obtained with ε = 0.001
Figure 7.10 Inverse-problem solution obtained with ε = 0.0001
304 Chapter 7 Evolutionary inverse problems
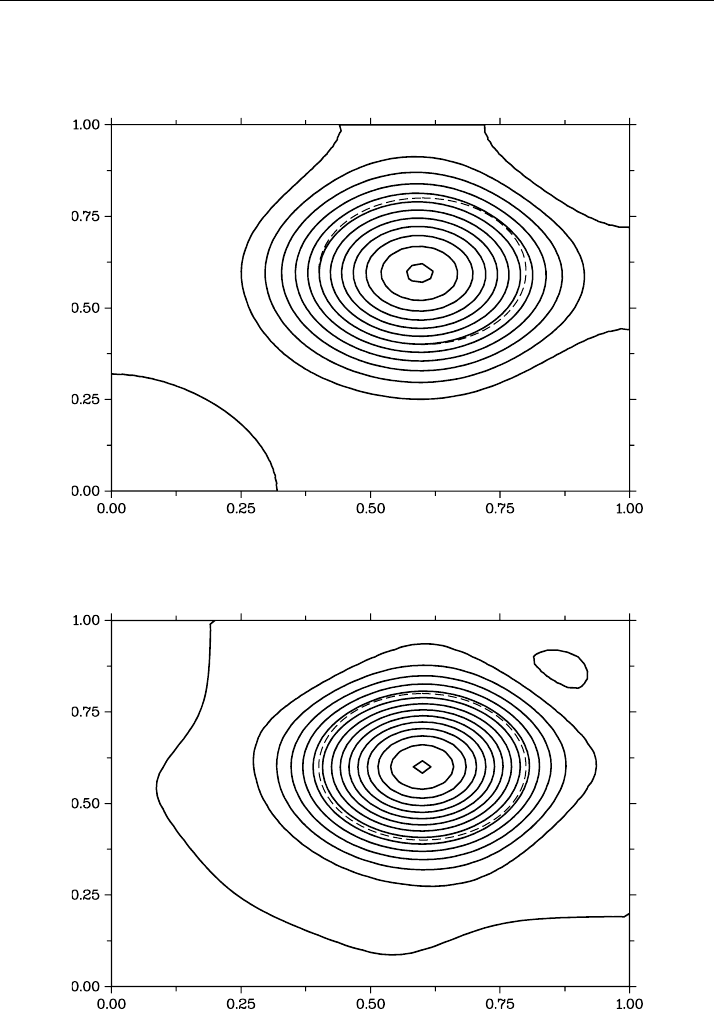
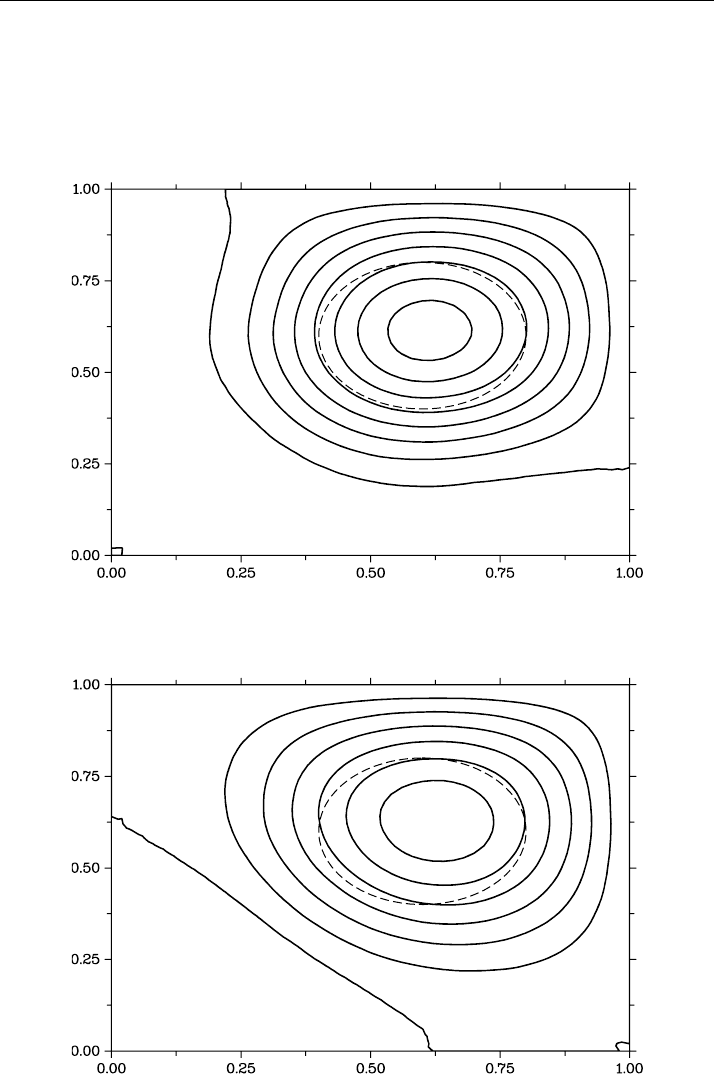
In perturbing input data, we have to try identify the smooth initial solution of the
inverse problem using a proper choice of the operator B = E in the iterative pro-
cess (7.179). Figure 7.11 shows the solution of the inverse problem obtained at the
inaccuracy level δ = 0.01. Solutions of the problem obtained at a higher and lower
inaccuracy levels are shown in Figures 7.12 and 7.13.
Figure 7.11 Inverse-problem solution obtained with δ = 0.01
Figure 7.12 Inverse-problem solution obtained with δ = 0.02
Section 7.4 Second-order evolution equation 305
Figure 7.13 Inverse-problem solution obtained with δ = 0.005
7.4 Second-order evolution equation
A classical example of ill-posed problems is the Cauchy problem for the elliptic equa-
tion (Hadamard examples). In this section, major possibilities available in the con-
struction of stable solution algorithm for such evolutionary inverse problems are con-
sidered. Methods using the perturbation of initial conditions and the perturbation of
the initial second-order evolution equation are briefly discussed. A program in which,
to approximately solve the Cauchy problem for the Laplace equation, regularized dif-
ference schemes are used, is presented.
7.4.1 Model problem
Consider the simplest inverse problem for the two-dimensional Laplace equation. Let
us start with formulating the direct problem. Suppose that in the rectangle
Q
T
= × [0, T ], ={x | 0 ≤ x ≤ l}, 0 ≤ t ≤ T
the function u(x, t) satisfies the equation
∂
2
u
∂t
2
+
∂
2
u
∂x
2
= 0, 0 < x < l, 0 < t < T. (7.180)
We supplement this equation with some boundary conditions. On the lateral sides of
the rectangle, we put:
u(0, t) = 0, u(l, t) = 0, 0 < t < T. (7.181)