Schneider P., Eberly D.H. Geometric Tools for Computer Graphics
Подождите немного. Документ загружается.


814 Chapter 13 Computational Geometry Topics
containing the four points. The problem is to construct the one with minimum area.
The area as a function of c is
Area(c) =
πc(1 −b + c)
(4c − b
2
)
3/2
The minimum area occurs when c makes the derivative of area with respect to c
zero, Area
(c) = 0. This leads to a cubic polynomial equation in c
P(c; u, v) = S(v)c
3
+ T(u, v)c
2
− T(v, u)c − S(u) = 0
where S(v) =v
3
(v −1)
2
and T(u, v) = uv
2
(2v
2
+uv + u −3v +1). The maximum
root for P provides the correct value of c. The minimum area occurs at c = 1 when
P(1; u, v) = 0. This occurs when u = v or u
2
+ uv +v
2
− u − v = 0(oru + v = 1
or u =−v). These curves decompose the valid (u, v) region into subregions where
c>1orc<1. Numerically, the largest root can be found in regions where c<1
by applying Newton’s method to P(c)= 0 with an initial guess of c =1.Inregions
where c>1, Newton’s method can be applied to the inverted polynomial equation
P(1/c) = 0 with an initial guess of 1/c = 1.
Minimum-Area Ellipse for Fixed Center and Orientation
A special case of the minimum-area ellipse problem is to choose a center and orien-
tation, then compute the ellipse axis lengths that produce the minimum-area ellipse
with that center and orientation. Since the input points can be written in the coor-
dinate system with the specified center as the origin and the specified orientation for
the axes, we can analyze the problem when the center is the origin and the orientation
is the identity matrix. The ellipse equation is (x/a)
2
+(y/b)
2
=1, and the ellipse has
area πab, which we want to minimize for the input set of points.
The constraints on the axis lengths are a>0 and b>0. Additional constraints
come from requiring that each point (x
i
, y
i
) is inside the ellipse, (x
i
/a)
2
+ (y
i
/b)
2
≤ 1. The problem is to minimize the quadratic function ab subject to all the in-
equality constraints. Let u = 1/a
2
and v = 1/b
2
. The equivalent problem is to max-
imize f(u, v) = uv subject to the linear inequality constraints u ≥ 0, v ≥ 0, and
x
2
i
u + y
2
i
v ≤ 1 for all i. This is a quadratic programming problem, so the general
methods for such problems can be applied here (Pierre 1986). This type of program-
ming arises in other computational geometry applications and is being investigated
by various researchers (for example, Gaertner and Schoenherr 2000).
Although the general quadratic progamming methods apply here, the problem
may be solved in a more geometric way. The domain of f(u, v) is bounded by
a convex polygon with edges u = 0, v = 0, and other edges in the first quadrant
determined by the point-in-ellipse containment constraints. Not all the constraints
necessarily contribute to the domain. The maximum of f must occur on the convex

13.11 Minimum Bounds for Point Sets 815
polygon boundary (not including u = 0orv = 0), so a smart search of that polygon
will produce the maximizing (u, v). This point can be a vertex or an interior edge
point. The constraint line that produces the smallest v on the u-axis is located by a
linear search. The other constraint lines are analyzed for intersection with this initial
line to find the closest intersection to (0, v). This search produces the first edge of the
convex polygon. If f is maximized at an interior point or at the u-minimum end
point, the problem is solved. Otherwise, the maximum of f on that edge occurs
at the u-maximum end point. The process of sorting constraint lines relative to
the constraint line that produced the u-maximum point is repeated. During the
iterations, as constraint lines are processed and/or determined not to ever participate
in the convex polygon boundary, they are marked as such to avoid processing them
again.
Minimum-Volume Ellipsoid
The algorithm for computing the minimum-volume ellipsoid containing a set of 3D
points is also similar to the one for minimum-volume spheres. The small problems
for a sphere involved finding the minimum sphere containing two, three, or four
points. For an ellipsoid, the small problems involve between four and nine points.
For nine points that form a convex polyhedron, the ellipsoid is computed as the solu-
tion of nine linear equations in the nine unknown coefficients for a general quadric
equation. For four points that form a convex polyhedron, an algebraic formula exists
for the minimum-volume ellipsoid. The center is
C =
1
4
3
i=0
P
i
the average of the points, and M is the 3 ×3 matrix whose inverse is
M
−1
=
1
4
3
i=0
(P
i
− C)(P
i
− C)
T
For the cases of 5 ≤ n ≤ 8, computing the minimum-volume ellipsoid is quite
difficult. The volume function depends on 9 −n variables (coefficients from the qua-
dratic equation). The 9 −n derivatives with respect to the variables are computed and
set to zero, each equation reducible to a polynomial equation. When n = 8, there is
one polynomial equation to solve in one unknown, a very tractable problem. How-
ever, when n = 5, there are four polynomial equations in four unknowns. Variables
can be reduced by elimination theory (Wee and Goldman 1995a, 1995b), but doing so
is subject to a lot of numerical problems, and the resulting single-variable polynomial
equation has an extremely large degree, so root finding itself will have a lot of numer-
ical problems. The other alternative is to numerically solve the system of polynomial

816 Chapter 13 Computational Geometry Topics
equations. It remains to be seen if anyone can produce a robust implementation of
the minimum-volume ellipsoid algorithm.
Numerical Minimization Methods
Although perhaps unappealing to computational geometers, the minimum-area or
minimum-volume bounding problems can be solved iteratively with numerical min-
imizers. In the case of circles, spheres, ellipses, or ellipsoids, the equations for these
quadratic objects have unknown coefficients that are subject to inequality constraints
based on point-in-object requirements. The area and volume formulas are derived
based on the unknown coefficients as variables. The result is a function to be mini-
mized subject to a set of inequality constraints, the topic of nonlinear programming.
The attractiveness of such an approach in an industrial setting is that it is easy to set
up and use existing robust nonlinear programming packages to solve the problem.
The speed and accuracy that a purely geometric approach might have is traded for
reduced development time, a viable trade-off in computer science that is typically
not considered by researchers in an academic environment.
13.12 Area and Volume Measurements
This section describes algorithms for computing areas of polygons, whether in 2D
or 3D, and for computing volumes of polyhedra. Various algorithms are shown with
algebraic, geometric, and analytic constructions.
13.12.1 Area of a 2D Polygon
Consider a triangle V
0
, V
1
, V
2
whose vertices are counterclockwise ordered. Setting
V
i
=(x
i
, y
i
), methods of basic algebra and trigonometry can be used to show that the
area of the triangle is
Area(V
0
, V
1
, V
2
) =
1
2
det
111
x
0
x
1
x
2
y
0
y
1
y
2
(13.1)
Clearly, Area(V
1
, V
2
, V
0
) = Area(V
2
, V
0
, V
1
) = Area(V
0
, V
1
, V
2
) since it does not
matter which vertex starts the counterclockwise ordering. However, if the order
is clockwise, then Area(V
0
, V
2
, V
1
) = Area(V
2
, V
1
, V
0
) = Area(V
1
, V
0
, V
2
) =−
Area(V
0
, V
1
, V
2
), all negative numbers. Thus, for any set of three vertices U, V , and
W , the function Area(U , V , W) as defined by Equation 13.1 is referred to as the
signed area of the triangle formed by the vertices. If the vertices are counterclock-
13.12 Area and Volume Measurements 817
wise ordered, the signed area is positive. If the order is clockwise, the signed area is
negative. If the vertices are collinear, the signed area is zero.
Area as an Algebraic Quantity
Let V = (x, y) be an arbitrary point in the plane. The following algebraic identity is
true:
Area(V
0
, V
1
, V
2
) = Area(V , V
0
, V
1
) + Area(V , V
1
, V
2
) + Area(V , V
2
, V
0
) (13.2)
The identity can be verified by expanding the determinants on the right-hand side of
the equation and performing algebraic operations to show that the result is the same
as the determinant on the left-hand side.
The formula for the area of a simple polygon P is inductive, the motivation being
the geometric intuition for Equation 13.2. The area for counterclockwise-ordered
vertices V
0
through V
n−1
and for an arbitrary point V is
Area(P) = Area(V , V
0
, V
1
) + Area(V , V
1
, V
2
) +···+Area(V , V
n−2
, V
n−1
)
+ Area(V , V
n−1
, V
0
) (13.3)
The proof of the formula uses mathematical induction. Suppose that the formula
is true for all simple polygons with n vertices. Now consider a polygon P
with
n + 1 vertices. As mentioned in Section 13.9, a polygon must have at least one ear,
a triangle that does not contain any other polygon vertices except the ones that form
the triangle. Relabel the vertices of P
so that the ear T is the triangle V
n−1
, V
n
, V
0
and the polygon P obtained from P
by removing the ear is V
0
, ..., V
n−1
. The area
of T is
Area(T ) = Area(V , V
n−1
, V
n
) + Area(V , V
n
, V
0
) + Area(V , V
0
, V
n−1
)
by Equation 13.2. The area of P is
Area(P) = Area(V , V
0
, V
1
) + Area(V , V
1
, V
2
) +···+Area(V , V
n−2
, V
n−1
)
+ Area(V , V
n−1
, V
0
)
by the inductive hypothesis. The area of P
is the combined area Area(P
) =
Area(T ) + Area(P). When the two expressions are added together, the term
Area(V , V
0
, V
n−1
) from Area(T ) cancels with the term Area(V , V
n−1
, V
0
) from
Area(P). The final sum is
Area(P
) = Area(V , V
0
, V
1
) + Area(V , V
1
, V
2
) +···+Area(V , V
n−1
, V
n
)
+ Area(V , V
n
, V
0
)

818 Chapter 13 Computational Geometry Topics
so the formula holds true for any P
with n + 1 vertices. By the principle of mathe-
matical induction, the formula is true for all integers n ≥ 3.
Using V =(0, 0), V
i
=(x
i
, y
i
), and Equation 13.1 for each term Area(
0, V
i
, V
i+1
),
an expansion of the right-hand side of Equation 13.3 leads to the formula that is
implementable in a computer program
Area(P) =
1
2
n−1
i=0
(x
i
y
i+1
− x
i+1
y
i
) (13.4)
where indexing is modulo n. That is, x
n
= x
0
and y
n
= y
0
.Eachtermofthesum-
mation in Equation 13.4 requires two multiplications and one subtraction. A simple
rearrangement of terms reduces this to one multiplication and one subtraction per
term:
n−1
i=0
(x
i
y
i+1
− x
i+1
y
i
) =
n−1
i=0
[x
i
(y
i+1
− y
i−1
) + x
i
y
i−1
− x
i+1
y
i
]
=
n−1
i=0
x
i
(y
i+1
− y
i−1
) +
n−1
i=0
(x
i
y
i−1
− x
i+1
y
i
)
=
n−1
i=0
x
i
(y
i+1
− y
i−1
) + x
0
y
−1
− x
n
y
n−1
=
n−1
i=0
x
i
(y
i+1
− y
i−1
)
The last equality is valid since x
n
= x
0
and y
−1
= y
n−1
based on the assumption
of indexing modulo n. The area is more efficiently calculated by a simple algebraic
observation:
Area(P) =
1
2
n−1
i=0
x
i
(y
i+1
− y
i−1
) (13.5)
The FAQ for the Usenet newsgroup comp.graphics.algorithms attributes the for-
mula to Dan Sunday (2001), but the formula has occurred earlier in Usenet, posted
by Dave Rusin (1995) to the Usenet newsgroup sci.math. Given the simplicity of the
observation, it probably was known even earlier than 1995.
If the polygon P is not simple and contains a hole that is itself a polygon, the area
is computed as the difference of the area bounded by the outer polygon and the area
bounded by the inner polygon. If your polygon data structure allows such a polygon
to be stored in a single array so that the interior of the polygon is always to the left of
13.12 Area and Volume Measurements 819
V
0
V
2
V
1
U
2
U
1
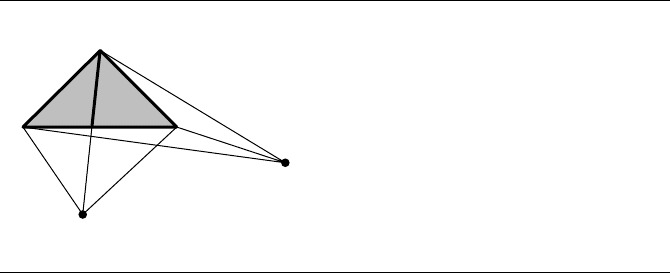
Figure 13.81
Points U
1
and U
2
chosen for computing Equation 13.2. Only one edge of the triangle
is visible to the first point. Two edges of the triangle are visible to the second point.
each edge, then the inner polygon is clockwise ordered. In this case Equation 13.5 is
still valid as shown without having to process the outer and inner polygons separately.
Area as a Geometric Quantity
Equation 13.2 has a geometric equivalent. Figure 13.81 shows a triangle and two
candidate points for V . The triangles that are formed by V and the edges that are
visible to it have negative signed areas. The other triangles have positive signed areas.
Notice that regardless of the choice of V , the partial signed areas of the overlap of the
triangles cancel, leaving only the area of the original triangle.
Area as an Analytic Quantity
The area of a 2D simple polygon P can also be derived using analytic methods from
calculus. Let the vertices of the polygon be V
i
= (x
i
, y
i
) for 0 ≤ i ≤ n − 1 and be
counterclockwise ordered. The interior of the polygon is the simply connected region
denoted R,soP is the boundary of region R. A formula for the area enclosed by
the polygon is obtained by an application of Green’s Theorem to a simply connected
region R with boundary curve P
R
∇·Fdxdy=
P
F ·nds
where F(x, y) =(F
1
(x, y), F
2
(x, y))is a differentiable vector field,
∇·F =∂F
1
/∂x +
∂F
2
/∂y is the divergence of the vector field, and n is an outward-pointing normal

820 Chapter 13 Computational Geometry Topics
vector to P. This formula can be found in many standard texts on calculus (for ex-
ample, Finney and Thomas 1996). If P is parameterized by (x(t), y(t)) for t ∈ [a, b],
a tangent vector is
t =(x
(t), y
(t)), where the prime indicates derivative with respect
to t and an outer normal is n = (y
(t), −x
(t)). The integral formula becomes
R
∇·Fdxdy=
b
a
F(x(t), y(t)) · (y
(t), −x
(t)) dt
The area formulation of Green’s Theorem arises when we choose F = (x, y)/2.
In this case
∇·F ≡ 1 and the integral on the left represents the area of R, the value
of which is determined by the integral on the right, an integral over the boundary P
of R:
Area(R) =
1
2
b
a
x(t)y
(t) − y(t)x
(t) dt (13.6)
Each edge of the polygon can be parameterized as (x
i
(t), y
i
(t)) = V
i
+ t(V
i+1
−
V
i
) for t ∈ [0, 1]. The integral over t becomes
b
a
x(t)y
(t) − y(t)x
(t) dt =
n−1
i=0
1
0
x
i
(t)y
i
(t) − y
i
(t)x
i
(t) dt
=
n−1
i=0
1
0
[x
i
+ t(x
i+1
− x
i
)][y
i+1
− y
i
]
− [y
i
+ t(y
i+1
− y
i
)][x
i+1
− x
i
]dt
=
n−1
i=0
[x
i
+ (x
i+1
− x
i
)/2][y
i+1
− y
i
]
− [y
i
+ (y
i+1
− y
i
)/2][x
i+1
− x
i
]dt
=
n−1
i=0
(x
i
y
i+1
− x
i+1
y
i
)
where x
n
= x
0
and y
n
= y
0
. This is exactly Equation 13.4, obtained by algebraic
means.
13.12.2 Area of a 3D Polygon
Considera3DpolygonP that encloses a simply connected region in the plane
ˆn ·X = c,where ˆn is unit length. Let the vertices be V
i
for 0 ≤i ≤n − 1, and assume
that the vertices are counterclockwise ordered as you view the polygon from the side
13.12 Area and Volume Measurements 821
pointed to by ˆn. Equation 13.5 applies to the coordinates of the 3D polygon relative
to the plane. If ˆu and ˆw are unit-length vectors such that ˆu, ˆw, and ˆn are mutually
perpendicular, then V
i
= x
i
ˆu + y
i
ˆw + c ˆn and the planar points are (x
i
, y
i
) = ( ˆu ·
V
i
, ˆw · V
i
) for all i. The area is
Area(P) =
1
2
n−1
i=0
( ˆu · V
i
)( ˆw ·(V
i+1
− V
i−1
)) (13.7)
This formula, although mathematically correct, requires more computing time to
evaluate than necessary.
Area by Projection
A more efficient approach is to observe that if ˆn =(n
0
, n
1
, n
2
) is a unit-length normal
and n
2
= 0, then the area of an object that lies in a plane with normal ˆn is
Area(object) = Area(Projection
xy
(object))/|n
2
|
That is, the area of the projection of P onto the xy-plane is calculated and adjusted
by the z-component of the normal. The result is a simple consequence of the surface
area formula for the graph of a function. If the plane is ˆn · (x, y, z) = c and n
2
= 0,
then z = f(x, y) = (c − n
0
x − n
1
y)/n
2
. The surface area of the graph of a function
f for (x, y) in a region R is
R
1 + f
2
x
+ f
2
y
dx dy
where f
x
= ∂f/∂x and f
y
= ∂f/∂y are the first-order partial derivatives of f .Inthe
case of the plane mentioned earlier, f
x
=−n
0
/n
2
, f
y
=−n
1
/n
2
, and
1 + f
2
x
+ f
2
y
=
1 +
n
0
n
2
2
+
n
1
n
2
2
=
n
2
0
+ n
2
1
+ n
2
2
n
2
2
=
1
|n
2
|
where the numerator of the fraction is 1 since ˆn is assumed to be unit length. There-
fore,
R
1 + f
2
x
+ f
2
y
dx dy =
R
1/|n
2
|dxdy = Area(R)/|n
2
|.

822 Chapter 13 Computational Geometry Topics
The area of a polygon in the plane with normal ˆn can therefore be computed by
calculating the area of the 2D polygon obtained by using only the (x, y) components
of the polygon vertices, then dividing by the absolute value of the z-component of the
plane normal. However, if n
2
is nearly zero, numerical problems might arise. Better
is to use (x, y), (x, z),or(y, z) depending on which of |n
2
|, |n
1
|,or|n
0
| is largest,
respectively. The final formula is
Area(P) =
1
2
1
|n
2
|
n−1
i=0
x
i
(y
i+1
− y
i−1
), |n
2
|=max
i
|n
i
|
1
|n
1
|
n−1
i=0
x
i
(z
i+1
− z
i−1
), |n
1
|=max
i
|n
i
|
1
|n
0
|
n−1
i=0
y
i
(z
i+1
− z
i−1
), |n
0
|=max
i
|n
i
|
(13.8)
Area by Stokes’ Theorem
Another formula for the area appears in Arvo (1991) in an article entitled “Area of
Planar Polygons and Volume of Polyhedra.” That formula is
Area(R) =
1
2
ˆn ·
n−1
i=0
(P
i
× P
i+1
) (13.9)
Given the counterclockwise ordering, the absolute values that appear in the actual
formula are not necessary. They are useful if you have an ordered set of vertices, but
you do not know if it is clockwise or counterclockwise. Replacing the formula P
i
=
x
i
U + y
i
V + c ˆn in the triple scalar product yields ˆn · P
i
× P
i+1
= x
i
y
i+1
− x
i+1
y
i
,
thereby showing the equivalence of the two formulas. However, ˆn is factored outside
the summation to reduce the n dot products to a single dot product. Each term
P
i
×P
i+1
requires 6 multiplications and 3 additions. The sum of the n cross products
requires 3(n − 1) additions. The dot product with ˆn requires 3 multiplications and
2 additions, and the final product by one-half requires 1 multiplication. The total
calculation requires 6n + 4 multiplications and 6n − 1 additions. Clearly, Equation
13.8 is more efficient to compute than Equation 13.9.
The article in Arvo (1991) mentions that Equation 13.9 can be derived from
Stokes’ Theorem, which states
S
∇×F ·ˆndσ =
C
F · d
R
where S is a manifold surface whose boundary is the bounded curve C.Thevector
field F is normal to S at each position. The curl of F = (F
1
(x, y, z), F
2
(x, y, z),
F
3
(x, y, z)) is
∇×F =
∂F
3
∂y
−
∂F
2
∂z
,
∂F
1
∂z
−
∂F
3
∂x
,
∂F
2
∂x
−
∂F
1
∂y
13.12 Area and Volume Measurements 823
the differential d
R = (dx, dy, dz), but restricted to the curve C, and the differential
dσ represents an infinitesimal element of the surface S.
In the case of a polygon in 3D, S is the planar region bounded by the polygon,
C is the polygon itself, ˆn is a unit-length normal vector (the polygon vertices are
counterclockwise ordered relative to ˆn), and F =ˆn × (x, y, z)/2, in which case
∇×
F =ˆn. The area is
Area(S) =
S
dσ =
S
ˆn ·ˆndσ =
C
1
2
ˆn × (x, y, z) · (dx, dy, dz)
=
C
1
2
ˆn · (x, y, z) × (dx, dy, dz)
If C is parameterized by (x(t), y(t)) for t ∈ [a, b], the formula becomes
Area(S) =
1
2
b
a
ˆn · (y(t)z
(t) − z(t)y
(t), z(t)x
(t) − x(t)z
(t), x(t)y
(t)
− y(t)x
(t)) dt
=ˆn ·
1
2
b
a
y(t)z
(t) − z(t)y
(t) dt,
1
2
b
a
z(t)x
(t) − x(t)z
(t) dt,
1
2
b
a
x(t)y
(t) − y(t)x
(t) dt
Observe that each integral is of the form shown in Equation 13.6. Thus, the
area of the polygon is a weighted sum of the areas of planar polygons obtained by
projection of the original polygon onto the three coordinate planes, the weights being
the components of the normal vector. Each of the integrals is given by Equation 13.5
with respect to the appropriate coordinates, so
Area(S) =
1
6
ˆn ·
n−1
i=0
y
i
(z
i+1
− z
i−1
),
n−1
i=0
z
i
(x
i+1
− x
i−1
),
n−1
i=0
x
i
(y
i+1
− y
i−1
)
=
1
2
ˆn ·
n−1
i=0
P
i
× P
i+1
which is precisely Equation 13.9.