Stacey F.D., Davis P.M. Physics of the Earth
Подождите немного. Документ загружается.

//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C17.3D
–
277
– [267–293] 13.3.2008 2:15PM
d
dr
¼
p
r ð
2
p
2
Þ
12
=
: (17:23)
Then, integrating with respect to r from the
deepest point of penetration of a ray, at radius
r
0
, to the surface, r
0
,
1
2
¼
ð
r
0
r
0
pdr
r ð
2
p
2
Þ
12
=
: (17:24)
This is Abel’s integral equation, giving ,and
hence V, as a function of r from observed values
of D and p.
The solution of Eq. (17.24) in a convenient
form, known as the Wiechert–Herglotz formula
(e.g. Jeffreys, 1959), is
ð
1
0
cosh
1
p
p
1
d ¼ p ln
r
0
r
1
; (17:25)
where p
1
is the value of p at D ¼D
1
, for the ray that
penetrates to radius r
1
, at which the wave speed is
V
1
. Equation (17.25) can be used for numerical
integration over any range for which p(D)isa
continuous, monotonic function, and so gives
V(r) over this range. Different seismic phases
give overlapping ranges, allowing interpolation
over the breaks. For example, the major break in
P-wave travel times is due to the core shadow
zone, and since no direct P-waves ‘bottom out’
in the outer part of the core, they cannot indicate
the velocities there. However, SKS-waves involve
much shallower refractions into the core and are
of interest in examining a suggestion that there is
a gravitationally stable layer at the top of the core
(Section 22.7).
The PREM earth model (Appendix F) relies
heavily on free oscillation periods, but the models
that pre-dated free oscillation observations were
based entirely on body wave travel times and were
quite close to the currently accepted structure.
The modern model, ak135, uses this approach.
17.5 Earth models: density variation
in a homogeneous layer
Observations of the speeds of both P- and S-
waves, V
P
and V
S
, Eqs. (16.1) and (16.2), allow
/ and K/ to be determined:
¼ K= ¼ V
2
P
4
3
V
2
S
; (17:26)
= ¼ V
2
S
; (17:27)
but without further information density, , can-
not be estimated independently. Earth models
based entirely on body wave data were con-
structed by assuming large regions, where body
wave speeds are smoothly varying, to be chemi-
cally and mineralogically homogeneous. Then
the density increases with depth, z, by hydro-
static compression,
d
dr
¼
d
dz
¼
d
dP
dP
dz
¼
K
g ¼
g
; (17:28)
where P is the pressure and g is gravity. is a
known function of depth by Eq. (17.26), but g
depends on the density profile itself, since
g ¼ GmðrÞ=r
2
; (17:29)
where G ¼6.674 10
11
m
3
kg
1
s
2
is the gravi-
tational constant and m(r) is the total mass inside
radius r,
mðr Þ¼
ð
r
0
4pr
2
ðrÞdr: (17:30)
Equation (17.28) is the Williamson–Adams
equation for the density profile in a homo-
geneous layer. It is commonly referred to as
the Adams–Williamson equation, although
E. D. Williamson is the first author of the now
rather obscure paper in which it first appeared.
Since the compressions and rarefactions of
seismic waves are adiabatic, the incompressi-
bility in Eq. (17.26) is the adiabatic value, K
S
.
Therefore, when this is used in Eq. (17.28), the
density variation represented by this equation is
that due to adiabatic compression. It gives the
density gradient in a homogeneous layer with an
adiabatic temperature gradient. The most exten-
sive, apparently homogeneous regions within
the Earth, the outer core and the lower mantle,
are believed to support temperature gradients
that are close to adiabatic, so Eq. (17.28) applies
directly to these regions, with a minor proviso
concerning granular materials, considered
below. If the temperature gradient differs from
the adiabatic value by an amount
17.5 DENSITY VARIATION 277

//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C17.3D
–
278
– [267–293] 13.3.2008 2:15PM
¼
dT
dz
dT
dz
Adiabatic
; (17:31)
then a correction term is applied to Eq. (17.28),
d
dz
¼
g
; (17:32)
where is the volume expansion coefficient. This
is Birch’s generalization of the Williamson–Adams
equation (Problem 17.6). In the lithosphere, where
the average excess temperature gradient is of
order 10
2
Km
1
(10 8C/km) the two terms in
Eq. (17.32) are of comparable magnitudes
(Problem 19.3). The correction term is believed to
be significant also in the layer D
00
,atthebaseofthe
mantle.
Equation (17.28), without the added term in
Eq. (17.32), must apply very precisely to the outer
core, which is homogeneous and adiabatic. Apart
from the lithosphere and the D
00
layer, and thermal
complications in the phase transition zone
(Section 22.5), most of themantleisbelievedto
be quite close to adiabatic. As we point out
below, this is the conclusion to the application of
Eq. (17.32) to the lower mantle, but in Section 12.6
we point out that different regions of the mantle,
especially the lower mantle, must be convectively
cooled sequentially, and not simultaneously, so
that some heterogeneity is inevitable.
There are two other effects that complicate
the picture in the lower mantle. One is observa-
tionally indistinguishable from a departure from
adiabatic conditions, and applies to granular
materials, such as rocks with minerals having
different elasticities. It is a consequence of the
difference between relaxed and unrelaxed mod-
uli, as discussed in Section 10.4. The unrelaxed
modulus, K
VRH
in Eq. (10.13), deduced from seis-
mic wave speeds, is slightly higher than the
relaxed modulus K
R
in Eq. (10.12), which governs
static compression. For the lower mantle min-
eral mix the difference is listed in Table 18.1.
When Eq. (17.32) is used to infer the departure
from an adiabatic gradient, , a correction to is
required to convert the unrelaxed modulus
observed seismologically to the smaller relaxed
modulus. Failure to apply this correction leads to
a value of that is too small. Over the depth
range of the lower mantle this leads to a 100 K
underestimate of the temperature difference. A
temperature increment of 100 K, in excess of the
adiabat across the lower mantle, is inferred if
Eq. (17.32) is used with uncorrected PREM data.
The correction to the relaxed modulus increases
this increment to 200 K (Stacey, 2005).
Another complication that prevents precise
fitting of the Williamson–Adams equation to
the lower mantle arises from a subtle electronic
phase transition in iron ions at lower mantle
pressures. As discussed in Section 18.9, this
transition is smeared over a wide pressure
range, possibly almost the entire lower mantle.
As for all pressure-induced transitions, the high-
pressure state has higher bulk modulus and
density, so that there is a slightly greater, but
gradual, increase in density with depth than
would be expected for constant phase material
and there is an ‘anomalous’ contribution to
dK/dP. The departure of the lower mantle
from the Williamson–Adams equation is never-
theless quite modest, but inferences such as
departure from the adiabat must be treated
with caution.
17.6 Internal structure of the
Earth: the broad picture
The first step in elucidating the structure of the
Earth was the identification of the major layers
and the depths of the boundaries between them.
The radial variation in velocity, obtained from
body waves and shown in Fig. 17.9, accom-
plished this. Additional information is needed
to deduce the density variation. Frequencies of
numerous modes of free oscillation are well
observed and the spheroidal modes involve grav-
itational restoring forces, so inversion of the free
mode spectrum allows the development of a
complete model, including the density profile.
However, inversion calculations need a starting
point and this was provided by models based on
body wave data and constrained to match the
mass and moment of inertia of the Earth.
The crust is the only part of the Earth for
which density can be measured directly.
However, the isostatic balance of large surface
278 SEISMOLOGICAL DETERMINATION OF EARTH STRUCTURE
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C17.3D
–
279
– [267–293] 13.3.2008 2:15PM
features, such as mountain ranges and conti-
nents, allows the density of the uppermost part
of the mantle to be calculated, as considered in
Section 9.3, (see Fig. 9.6). The value is close to
3370 kg m
3
. Studies of upper mantle-derived
rocks confirm that this is a reasonable estimate.
It provides a starting point for downward extra-
polation of density by Eq. (17.28) or (17.32). This
extrapolation can be extended as far as the veloc-
ity structure indicates that homogeneity is a rea-
sonable assumption, but in the upper mantle a
series of velocity increments intervenes.
If we make the simplifying assumption that
below the upper mantle there are only two
regions, the lower mantle and the core, and
that each of these is homogeneous and adiabatic,
then Eq. (17.28) applies through each of them. In
this case we need to specify only the density at
any one level in each and these densities must be
selected so that the total mass and moment of
inertia of the model match the values of the
Earth (Eq. (7.3)). The use of moment of inertia
was a vital step in model calculations in the
1930s and 1940s by K. E. Bullen, who showed
that the lower mantle was intrinsically more
dense than the uppermost mantle by about
700 kg m
3
. He therefore identified the upper
mantle velocity increments (Fig. 17.9), that we
now explain as due primarily to recognized
phase transitions in silicates, with a zone of
increasing density. The models developed on
this basis were remarkably close to our present
ideas on Earth structure, as summarized in
Appendix F.
Earth models derived from both free oscilla-
tion and body wave data are necessarily more
secure than models based on one of these data
sets alone. The two types of observation each
have advantages and limitations. The free
modes give accurate global average properties,
but have long wavelengths that cannot distin-
guish fine details, such as whether boundaries
are sharp. Body waves can be used to examine
details that are inaccessible to free oscillation
studies, including lateral heterogeneities, but
do not lead directly to density estimates. In con-
sidering free oscillations and body waves
together, a wide range of frequencies is involved,
from 0.3 mHz for the
0
S
2
mode to more than
1 Hz for high frequency body waves. Over
this frequency range dispersion is significant
(Section 10.7) and must be allowed for, which
means that, although Q has the character of a
minor correction factor, it is an essential param-
eter in detailed Earth models.
Appendix F gives selected details of the most
widely used earth model, which is known by its
acronym, PREM (Preliminary Reference Earth
Model). The density structure is plotted in
Fig. 17.11(a), with corresponding values of inter-
nal pressure and gravity in Fig. 17.11(b). The
seismic velocities do not differ, to an extent
that is noticeable on a graph, from those of the
ak135 model, referred to in Section 17.4. PREM
includes dispersion corresponding to a simple Q
structure, inferred from free oscillations, and
assumed to be uniform over broad depth ranges
and to be frequency-independent. This means
dispersion given by Eq. (10.29), which, as sug-
gested in Section 10.7, probably overestimates
the dispersion in the Earth because Q shows a
general increase with frequency. The details in
Appendix F refer to properties at 1 Hz. PREM is a
global average model, a reference structure for
studies of finer details, including lateral hetero-
geneities, and for discussions of the physics of
the deep interior. Anisotropy of the upper layers
and separate continental and oceanic structures
are given in the original tabulation (Dziewonski
and Anderson, 1981).
17.7 Boundaries and discontinuities
Lateral velocity variations are recognized, but
are generally small compared with the radial
variations displayed in Fig. 17.9. There is a gen-
eral increase with depth due to the pressure
dependence of elasticity, but with discontinu-
ities in radial structure that must be explained
in terms of layers with different compositions
and/or crystal structures. Important questions
about a boundary between layers that can be
answered by seismological studies are
(i) what are the differences in the properties
(densities, elasticities) of the materials
above and below the boundary?
17.7 BOUNDARIES AND DISCONTINUITIES 279
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C17.3D
–
280
– [267–293] 13.3.2008 2:15PM
0
2
Depth (km)
Gravity, g
(m
s
–2
)
1000 2000 3000 4000 5000 6000 6371
6000 5000 4000 3000 2000 1000
0.5
0
1
1.5
2
2.5
3
3.5
P
g
Radius (km)
Pressure, P
(10
11
Pa)
0
4
6
8
10
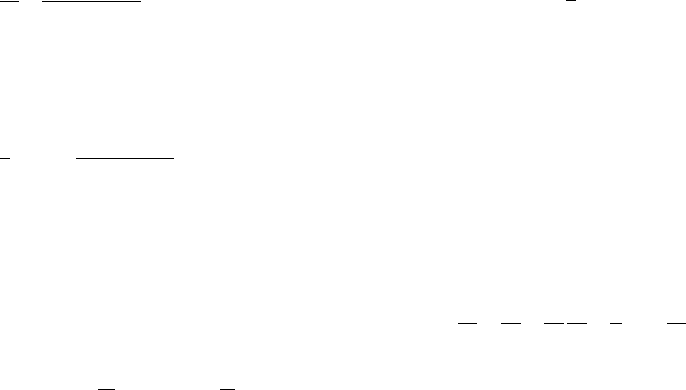
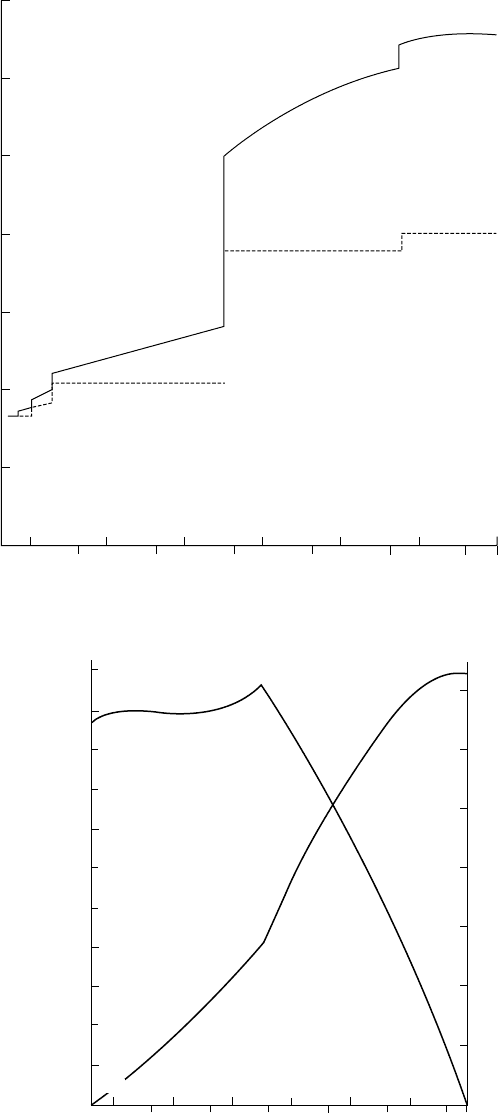
FI G U R E 17.11(b) Gravity and pressure
corresponding to the density profile in
Fig. 17.11(a).
6000 5000 4000 3000 2000 1000 0
0 1000 2000 3000 4000 5000 6371
6000
0
2
4
6
8
10
12
14
Depth (km)
Radius (km)
Density (1000 kg m
–3
)
ρ
0
ρ
0
ρ
ρ
FI G U R E 17.11(a) Profile of
density, , for the earth model
PREM with corresponding zero
pressure, low temperature
density, estimated by finite strain
theory (Chapter 18).
280 SEISMOLOGICAL DETERMINATION OF EARTH STRUCTURE
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C17.3D
–
281
– [267–293] 13.3.2008 2:15PM
(ii) is the boundary universal or does it occur
only in particular areas?
(iii) is it sharp or diffuse?
(iv) is it smooth, undulating or rough?
The contrast in properties across each of the
important boundaries in the Earth, as determined
in model studies, is unambiguous where the
boundaries are sharp and isolated from one
another and from graded transitions. A check
that these conditions are satisfied is provided by
measurements of reflection coefficients and P to
SV or SV to P conversions. Reflections occur only
where a boundary is sharp, relative to the wave-
length used to investigate it. Thus, a boundary
that has a reflection coefficient, independent of
frequency up to the highest usable frequency, is
sharp in the sense of having no observable struc-
ture. The core–mantle boundary (CMB) is the
most obvious example. This is a boundary
between liquid metal and solid, rocky material.
However, many reflections from it are very weak
because the reflection coefficient is determined
by the contrast in acoustic impedance, velocity
density, which for P-waves happens to be nearly
the same in the core and mantle (see Problem
16.1, Appendix J). The inner core boundary
(ICB) is also found to be sharp (less than 2 km
thick according to Kawakatsu, 2006), allowing
no more than a thin mushy zone where outer
core fluid is freezing out. Reflections observed in
the mantle, especially at the 410 and 670 km
boundaries, are attributed to solid–solid phase
transitions between different mineral assemb-
lages (Tables 2.4a,b). Not all such transitions
are sharp. Graded transitions can be observed
only by seismic refractions, that is by travel-time
studies.
Some boundaries occur at different depths in
different areas or are seen in some areas but are
missing from others. The boundary between the
crust and mantle, the Mohorovic
ˇ
ic
´
discontinuity,
M layer or Moho, is typically 7 km below the sea
floor in oceanic areas, but 35 to 40 km deep
under continents and 60 km under major moun-
tain ranges. The different crustal thicknesses are
isostatically balanced (Section 9.3) and so the
seismological observation of the Moho depth
gives a measure of the density contrast between
the crust and mantle. Similar undulations of the
core–mantle boundary have been sought, but are
relatively slight (Doornbos and Hilton, 1989), the
strong heterogeneities at the boundary being
attributable to the base of the mantle (layer D
00
).
In the case of the CMB the height and typical
wavelength of the undulations are important to
the mechanical coupling of the mantle to core
motions (Section 7.5).
In Section 12.5 the irregularities in D
00
are
attributed to a structure analogous to continents
and ocean basins at the surface (Fig. 12.3). Young
and Lay (1990) reported evidence of a boundary
at about 250 km above the CMB and it appears
possible that this is an upper boundary of a
crypto-continent (see Fig. 12.3). This boundary
is observed in some areas, but appears to be
absent from others, which are therefore
assumed to be crypto-oceanic areas where ‘nor-
mal’ mantle extends down to the CMB. It will
be important to our understanding of the
core–mantle interaction to determine what frac-
tion of the CMB is of each kind. The distinction
is, in any case, compromised by the transition to
the post-perovskite phase near to the base of the
mantle. Undulations of this phase boundary
would arise from the temperature dependence
of the transition pressure.
Recent analysis of digital seismic data have
revealed patches of extremely low velocity at the
base of the D
00
region at the CMB. The origin of
these so-called ultra low velocity zones (ULVZs) is
controversial, with explanations ranging from
temperature effects, possibly accompanied by
partial melt, to variations in composition as sili-
cate material interacts with the iron of the core.
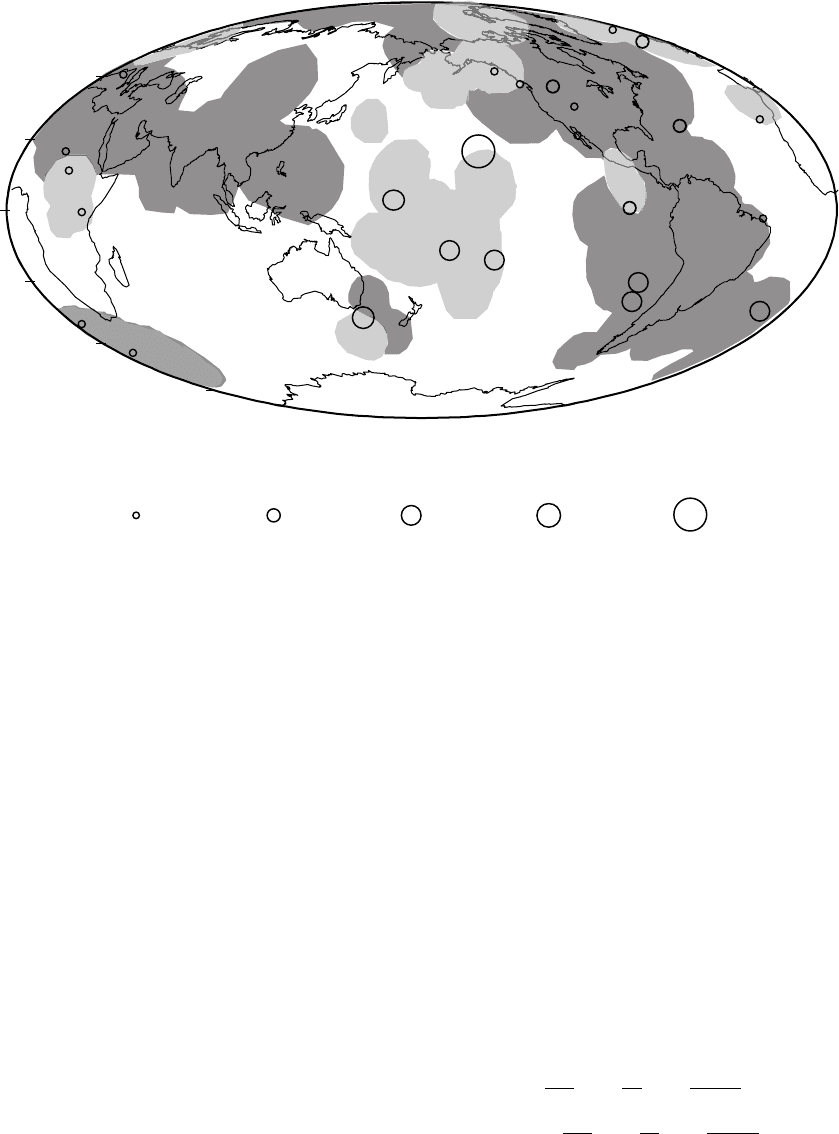
Maps of ULVZs (Fig. 17.12) correspond roughly
to the distribution of hot spots and so ULVZs may
be the bases of plumes upwelling from the core–
mantle boundary to the surface (Williams et al.,
1998). The alternative explanation is that the
post-perovskite mineral phase (ppv) at the base
of the mantle absorbs iron from the core and
iron-rich ppv has low seismic velocities, consistent
with ULVZs (Mao et al., 2006).
Topographic maps of the 410 and 660 km dis-
continuities (Fig. 17.13) show that they undulate
by 20 km or more in depth (Flanagan and Shearer,
1998). For the pyrolite model of mantle minerals
17.7 BOUNDARIES AND DISCONTINUITIES 281
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C17.3D
–
282
– [267–293] 13.3.2008 2:15PM
the 410 km boundary marks the ! transi-
tion of olivine and the 660 km boundary marks
the transition to perovskite þmagnesiowustite.
Clapeyron slopes, dT
C
/dP, for the phase transi-
tions are positive for the 410 km transition and
negative for that at 660 km, so that the boundary
undulations would be negatively correlated if
caused by temperature only. This is not always
clear (Flanagan and Shearer, 1998) but evidence
of regions exhibiting negative correlation is
accumulating. At subduction zones the 660 km
boundary is found to be deeper than the global
average, but correlated shallowing of the 410 km
boundary is not easily observed, perhaps because
it is more localized to the slab and presents too
limited an area for seismic reflections. Lebedev
et al. (2002) used seismically estimated variations
in transition zone depths and thicknesses, H,
beneath stations in Australia and East Asia and
temperatures estimated from tomography to
obtain Clapeyron slopes. Differential arrival
times of P–S converted phases from the 660 km
and 410 km discontinuities were converted to H
using the tomographic velocities. Temperatures
at the discontinuities were inferred by using labo-
ratory estimates of ð@ ln V
S
=@T Þ
P
to convert veloc-
ity variation, ln V
S
, to temperature. A plot of T
versus H has a slope dT/dH ¼0.13 0.07 km/K, in
agreement with the laboratory value for pyrolite,
0.13 km/K (Bina and Helffrich, 1994). Variation in
transition zone thickness is
H ¼
dP
dT
C
660
dz
dP
660
@T
@ ln V
S
P
ln V
660
S
dP
dT
C
410
dz
dP
410
@T
@ ln V
S
P
lnV
410
S
:
(17:33)
<0.5
0.6
– 1.5
1.6
– 2.5
2.6
– 3.5 >3.6
Hot spot flux (Mg/s)
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
FI G U R E 17.12 Locations of ultra low velocity zones (ULVZs) at the base of the mantle. Light shading shows
where they are more than 5 km thick, dark shading indicates their absence, or thicknesses less than 5 km. Areas
where no determinations have been made are unshaded. Circles represent hot spots with symbol size being
proportional to estimated strength in areas studied, and crosses indicating hot spots above regions
not yet seismically investigated for ULVZs. (Redrawn from Williams et al., 1998.)
282 SEISMOLOGICAL DETERMINATION OF EARTH STRUCTURE
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C17.3D
–
283
– [267–293] 13.3.2008 2:15PM
Data from multiple stations and events were
used to estimate ðdP=dT
C
Þ
410
¼ð2 2 MPa=KÞ
and ðdP=dT
C
Þ
660
¼ð3 1:5 MPa=KÞ separately.
These values, although imprecise, are compati-
ble with the range of laboratory estimates.
Evidence of an upper mantle boundary
520 km from the surface was seen in stacked dig-
ital records of reflected waves by Shearer (1990).
This boundary does not appear in PREM. It must
occur at a more or less fixed depth to be seen in
the globally stacked records, but in regional
stacked records this transition has proved to be
more elusive. Deuss and Woodhouse (2001) found
that in some places the 520 km boundary appears
as a single reflector, whereas in others it is either
split or not visible at all. Possible candidates are
the transition in the olivine component and
the garnet–perovskite transition in the non-
olivine component (Ita and Stixrude, 1992).
With variations in temperature or composition
these could occur at significantly different
depths. A systematic relationship between split-
ting and tomographic velocity, which would be
expected if temperature effects dominate, has
not been observed, indicating that composition
is also important. The 520 km phase transition is
evidently spread over a greater depth range
(10 km) than the 410 or 660 km transitions
(2 km) because it does not reflect short period
energy (Benz and Vidale, 1993). Its absence from
PREM and from refraction studies (Jones et al.,
1992) suggests that it arises from a density incre-
ment (but not a sharp one), with little velocity
change, giving an impedance mismatch and
consequent reflections of long-period waves at
near-vertical incidence, but little indication in
refractions or short-period observations (Rigden
et al., 1991; Vidale, 2001).
The boundary at about 200 km (180 km in
PREM) was not seen in Shearer’s (1990) analyses.
These discrepancies suggest fundamental dif-
ferences between the boundaries, their depend-
ences on temperature and composition and
between methods of observation. The boundary
at 180 km in PREM is the base of a low-velocity
zone, which we identify with the asthenosphere
or soft layer of the upper mantle. It is less well
developed under continents than under oceans,
and if it occurs at a variable depth, when seis-
mograms from different wave paths are added
‘410’ ‘520’
400 406 412 418 424 430 436 497 503 509 515 521 527 533
‘660’ TZ Thickness
Depth (km)
642 648 654 660 666 672 678 223 229 235 241 247 253 259
FI G U R E 17.13 Undulations of phase boundaries and transition zone thickness (Flanagan and Shearer, 1998).
17.7 BOUNDARIES AND DISCONTINUITIES 283
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C17.3D
–
284
– [267–293] 13.3.2008 2:15PM
inthestackingprocess,evidenceforadisconti-
nuity is washed out.
17.8 Lateral heterogeneity: seismic
tomography
Lateral heterogeneities are most obvious in the
crust andoccur throughoutthemantle. As pointed
out in Section 17.1, the outer core must be very
homogeneous. It is difficult to imagine significant
compositional heterogeneity in the inner core,
but its anisotropy is probably quite variable; in
any case, seismology gives rather poor resolution.
Lateral structure is explored in various ways, espe-
cially by seismic tomography. Tomography is a
word borrowed from the medical imaging of ana-
tomical structure by multi-directional X-rays, but
the analogy is imperfect because X-ray imaging
depends entirely on variations in absorption,
with no refraction or diffraction. Seismic tomog-
raphy relies on variations in wave velocity, so that
body waves arriving early (or late), relative to
waves through a reference model such as PREM,
have traversed faster (or slower) paths than aver-
age. Travel times over numerous paths in various
directions allow the heterogeneities to be local-
ized. But the resolution is limited by the neglect
of diffraction (Doornbos, 1992).
The propagation of seismic waves is, in many
respects, analogous to the propagation of light
waves. Although the similarity includes diffraction,
there is an important difference between the way
we view diffracted light and the treatment of most
seismic signals. When we see an optical diffraction
pattern we are looking at the effect of a continuous
(usually monochromatic) wave. Light arriving at
any point in the field of view is, in general, a phased
sum of the contributions from several paths of
various optical lengths. In travel-time tomography
we consider only the first arrivingpulse, which
means that we use only the component of the
signal that travels by the fastest path. As
mentioned in Sections 16.1 and 16.3, Wielandt
(1987) drew attention to problems that can arise
in the identification of low- or high-velocity regions
from the arrival times of seismic pulses propagat-
ing through or diffracted around them.
Consider first a low-velocity sphere. Beyond a
limited distance, determined by the size and
velocity contrast, the wave diffracted around it
arrives earlier than the wave directly through it
and the anomaly becomes seismically invisible.
For a sphere of high-velocity material, the direct
transmitted wave arrives first and the sphere
remains visible to much greater distances.
Refraction by the sphere spreads out the trans-
mitted early wavefront, so that eventually it is
lost, but at intermediate distances the wave
spreading has the effect of making the anoma-
lous volume appear larger than it is. Thus, body
wave travel times lead to overestimates of high-
velocity anomalies and underestimates of low-
velocity anomalies. Tomography can only
identify broad features in the deep mantle.
Some of the things that would be of interest,
especially small low-velocity features, such as
the stems of ascending plumes, are inaccessible.
High-velocity features, such as fragments of sub-
ducted slabs, are more visible. On the present
evidence it is difficult to judge the importance
of the tendency for globally averaged body wave
speeds to be biased high.
Recognizing these limitations, travel-time
tomography, using high-frequency body waves,
has been applied to large-scale features in the
lower mantle (Dziewonski, 1984), yielding
anomalies with velocity contrasts up to 1%. The
spatial pattern was represented by harmonic
degrees up to 6, sufficient to outline features
about 2000 km across. Subsequent analyses con-
firmed that at least the larger-scale features are
robust, although they are regional averages of
structures with unseen finer details. Studies of
upper mantle tomography (Woodhouse and
Dziewonski, 1984; Zhang and Tanimoto, 1991,
1992) used surface waves with numerous inter-
locking paths. The principle is similar except
that, for any wave path, the different depths
are sampled by comparing different frequency
ranges (Section 16.5). Subsequent to these early
studies, numerous global tomographic models
have been presented (e.g., Grand et al., 1997;
Grand, 2001; Su and Dziewonski, 1997; Ritsema
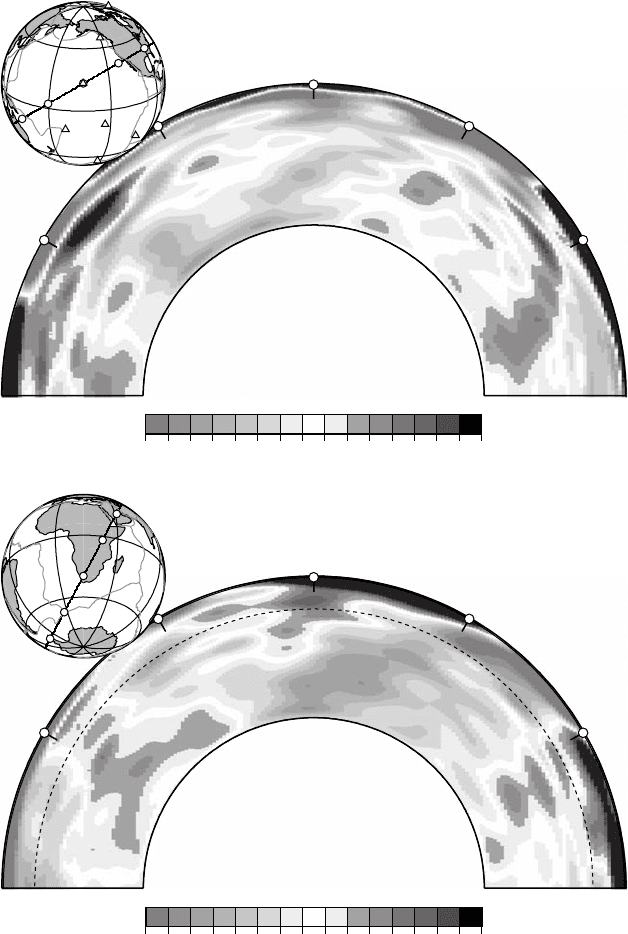
et al., 1999 – see Fig. 17.14(a); Masters et al., 2000 –
see Figs. 17.14(b)–(d)) for which there has been a
general convergence on locations and sizes of
284 SEISMOLOGICAL DETERMINATION OF EARTH STRUCTURE
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C17.3D
–
285
– [267–293] 13.3.2008 2:15PM
mantle heterogeneities. Of particular note is the
discovery that some parts of the subducting slabs
beneath North and South America can be traced
through the mantle transition zones all the way to
the core (Fig 17.14(a)), effectively ending a debate
about isolation of the convective circulations of
the upper and lower mantles. Some slabs in the
western Pacific and beneath Asia appear to pond
–1.5% +1.5%
shear velocity variation from 1-D
Latitude
= 20°
Longitude
= –155° Azimuth = 60°
(–)
(–)
(+)
(+)
(+)
(+)
–1.5% +1.5%
shear velocity variation from 1-D
(–)
(–)
(–)
(+)
(+)
(+)
Latitude
= –30°
Lon
g
itude = 20° Azimuth = 28°
FI G U R E 17.14(a) Cross-sections of a seismic tomography model (Ritsema et al., 1999), showing Pacific and African
superplumes and deep subduction of the Farallon plate under the Americas.
17.8 LATERAL HETEROGENEITY: SEISMIC TOMOGRAPHY 285
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C17.3D
–
286
– [267–293] 13.3.2008 2:15PM
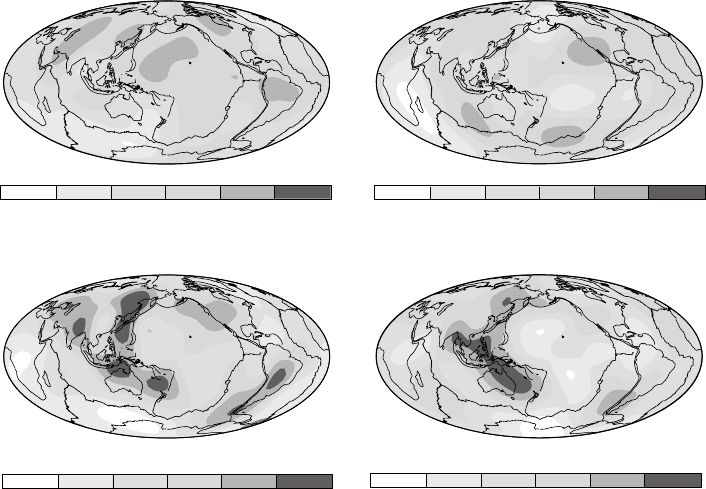
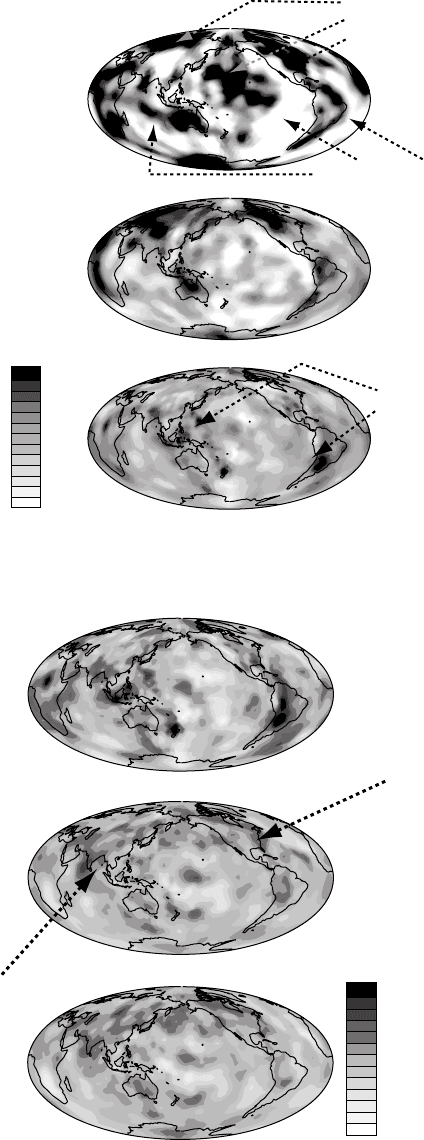
SB4L18-Upper Mantle
60 km
290
km
700
km
2.2
1.4
0.6
–0.6
–1.4
–2.2
slow mid-ocean ridges
fast continental shield
and old oceans
the continental plates have fast
'keels' at depths at which the
oceanic areas are already underlain
by the slow asthenosphere
The 'cold' subducting slabs show up
as seismically fast areas. They pass the
660
km discontinuity between upper and
lower mantle and penetrate well into
the lower mantle.
δ Vs/Vs
[%]
SB4L18-Mid-Mantle
Some of the 'cold' subducting slabs
can be traced well into the lower mantle.
E.g. old Farallon and Tethian subducting
slabs.
2.2
1.4
0.6
–0.6
–1.4
–2.2
δ Vs/Vs
[%]
925
km
1525
km
1825
km
FIGURE 17.14 (b), (c) Map views of mantle tomograms from Masters et al. (2000).
Figures provided by Gabe Laske
286 SEISMOLOGICAL DETERMINATION OF EARTH STRUCTURE