Teodorescu P.P. Mechanical Systems, Classical Models Volume I: Particle Mechanics
Подождите немного. Документ загружается.


MECHANICAL SYSTEMS, CLASSICAL MODELS
30
i
()
=
=+ −
∑
rr rr
1
() ()
n
ii
i
mμμ δ ,
(1.1.71'')
where the sign “tilde” corresponds to
the differentiation in the usual sense,
i
μ is the
density corresponding to a continuous system,
i
m are the masses of n particles of
position vectors
i
r ,
= 1,2,...,in
, while δ is the Dirac distribution.
The density of a particle of mass
m and position vector
0
r is thus given by
(
)
=
−rrr
0
() mμδ ;
(1.1.72)
in the case of a discrete mechanical system we have
()
=
=−
∑
rrr
1
()
n
ii
i
mμδ,
(1.1.72')
while for a continuous mechanical system we obtain
i
=r
d
()
d
m
V
μ
.
(1.1.72'')
The function
≥r() 0μ is continuous at least partially; in general, if no confusion is
possible, then we omit the sign tilde. Obviously, we can introduce also the notion of
mean density
Δ
=
Δ
r
mean
()
m
V
μ
,
(1.1.72''')
where
Δm is the mass of a finite volume element
Δ
V (Fig.1.14); there results
Δ→
=
rr
mean
0
() lim ()
V
μμ.
(1.1.72
iv
)
The mass is given by
dMV
Ω
μ=
∫
(1.1.73)
for an arbitrary mechanical system, the integral being a
Stieltjes integral; in case of a
discrete mechanical system, we have
=
=
∑
1
n
i
i
Mm
,
(1.1.73')
while for a
continuous mechanical system we may write
()d
V
MVμ=
∫
r
,
(1.1.73'')

Newtonian model of mechanics
31
the integral being a
Riemann integral
i
(
)
=
μμ.
In this last case, the density varies from one point to another one, and the continuous
mechanical system is
non-homogeneous; in the case in which the density μ is the same
for all the points of the continuous medium, this one is
homogeneous (besides, in this
case all its mechanical and physical properties are the same in any points) and we may
write
=
MVμ .
(1.1.73''')
We remark that, in general, the results obtained for a discrete mechanical system may
be enounced also for a continuous mechanical system by replacing the sign
∑
by the
sign
∫
. Thus, two types of mathematical models of mechanics have been put in
evidence, i.e.
the discrete model and the continuous model. We mention that one can
construct also other more sophisticated mathematical models, for example
quasi-
continuous models
(continuous models which take in consideration the discrete
structure of matter); the above general considerations remain valid also in this case. One
can study also mathematical models which start from the discrete character of material
bodies; with the aid of a sufficient great number of particles, they introduce statistical
methods of computation, using
aleatory variables.
1.1.9 The principle of mass conservation
The geometric support of a continuous mechanical system can vary in time
()
= ()VVt. The formula (1.1.73'') is of the form
()
123
()
,,;d
Vt
MxxxtVμ=
∫
,
(1.1.74)
where
=
()
jj
xxt
,
= 1, 2, 3j , and
=
123
ddddVxxx. By a change of variables of the
form
()
=
000
123
,,;
ii
x xxxxt,
=
1, 2, 3i ,
(1.1.75)
the Jacobian
J of the transformation being different from zero
()
()
123
000 0
123
,,
det det 0
,,
i
j
xxx
x
J
xxx x
⎡⎤
⎡⎤
∂
∂
≡≡≠
⎢⎥
⎢⎥
∂∂
⎣⎦
⎣⎦
,
(1.1.75')
it follows that
0
0
d
V
MJVμ=
∫
,
(1.1.74')
where
=
0
0
()
jj
xxt, = 1, 2, 3j ,
=
00
()VVt, =
000
0
123
d dddV xxx correspond to the
initial moment
0
t . If we write the formula (1.1.74) for
=
0
tt, and if we take into
MECHANICAL SYSTEMS, CLASSICAL MODELS
32
account (1.1.74'), admitting that the function under the integral sign is continuous and
choosing the domain
0
V arbitrarily, then the principle of mass conservation leads to
=
0
Jμμ,
(1.1.76)
where
=
()tμμ and =
00
()tμμ . This is d’Alembert’s condition of mass continuity.
One observes from (1.1.76) that
μ is a relative scalar, i.e. a scalar density, the
denomination given to such a quantity being thus justified.
If at any moment we have a relation of the form
=
1J or
=
0
μμ, then the motion
is incompressible (or the body is incompressible).
One may also put the condition of mass conservation (invariance), equating to zero
the derivative of the mass (1.1.74') with respect to time; one obtains
()
(
)
00
00
d
dd d
dd
dd dd
VV
MJ
JV J V
tt tt
μ
μμ==+
∫∫
.
We notice that we may write (see Chap. 2, Subsec. 1.2.3)
⎡
⎤⎡⎤
∂∂
∂
==
⎢
⎥⎢⎥
∂
∂∂
⎣
⎦⎣⎦
00
dd
det det
dd
ii
j
j
xx
J
tt t
xx
00 0
1
6
j
ik
ijk lmn
mn
l
x
x
x
t
xx x
∂
∂
∂
∂
⎛⎞
=∈∈
⎜⎟
∂
∂∂ ∂
⎝⎠
00 0 00 0 00 0
1
6
jjj
ikikik
ijk lmn
mn mn mn
lll
xvx
xxv
vxx
xx x xx x xx x
∂∂∂
∂∂∂
∂∂∂
⎛⎞
=∈∈ + +
⎜⎟
∂∂ ∂ ∂∂ ∂ ∂∂ ∂
⎝⎠
,
where we used the formula (2.1.36''), corresponding to the development of a
determinant; if we interchange indices
i and
j
and indices l and m with each other,
respectively, in the second sum, and indices
i and k , and indices l and m with each
other, respectively, in the third sum, and if we take into consideration the properties of
Ricci’s tensor, then we obtain
00 0 00 0
d1 1
d2 2
jpj
ik i k
ijk lmn ijk lmn
p
mn mn
ll
xx
xx
x
vv
J
tx
xx x xx x
∂
∂
∂
∂
∂
∂∂
=∈∈ =∈∈
∂
∂
∂∂ ∂∂∂
,
where we expressed the components of the velocity of a point of the mechanical system
as functions of the co-ordinates
j
x ,
=
1, 2, 3j . Taking now into account the relation
(2.1.37'), it follows that
∂
∂
==
∂
∂
d
d
ii
ip
p
i
vv
J
JJ
tx x
δ
,
where we have introduced the velocity components of a point of the mechanical system
Newtonian model of mechanics
33
∂
===
∂
d
d
jj
j
j
xx
vx
tt
,
=
1, 2, 3j ;
(1.1.77)
we obtain thus
Euler’s formula (here and in what follows, see App., §2)
= v
d
div
d
J
J
t
,
(1.1.78)
which is verified in any point of a continuous mechanical system and by any particle in
motion; this relation may be written also in the form
= v
d
ln div
d
J
t
.
(1.1.78')
Returning to the derivative of the mass
M with respect to time, which we equate to
zero, we can write
(
)
0
0
d
d
div d 0
dd
V
M
JV
tt
μ
μ=+ =
∫
v ,
where the volume
0
V is arbitrary. If the function under the integral sign is continuous,
then we may write
the condition of mass continuity in Euler’s form
+
=v
d
div 0
d
t
μ
μ
.
(1.1.79)
Observing that
∂∂
=+ ⋅=+⋅
∂∂
r
v
d
d
grad grad
dd
tt tt
μμ μ
μμ
,
(
)
=
+⋅vvvdiv div gradμμ μ,
we obtain the condition (1.1.79) also in the form
()
∂
+
=
∂
vdiv 0
t
μ
μ
.
(1.1.79')
If the density is constant at any time, we obtain
=
vdiv 0 ,
(1.1.78'')
hence, the field of velocities is
solenoidal (the velocities form a field of curls). The
relation (1.1.79) can be expressed also in the form
+
=v
d
ln div 0
d
t
μ
.
(1.1.79'')

MECHANICAL SYSTEMS, CLASSICAL MODELS
34
The relations (1.1.78') and (1.1.79'') lead to
()
=
d
ln 0
d
J
t
μ
;
hence, the product
Jμ is constant at any moment, being equal to
0
μ (corresponding to
the initial state). We return thus to the condition of mass continuity given by
d’Alembert. The forms in which the principle of mass conservation may be expressed
are thus obtained.
The transformation relation (1.1.75) puts in evidence the position vector
()
r
000
0
123
,,xxx , corresponding to the initial position
=
0
tt
, and the position vector
()
r
123
,,xxx , corresponding to the actual position (an arbitrary moment t ); this
relation may be written in the vector form
(
)
=
rrr
0
;t .
(1.1.75'')
If the continuous mechanical system
S is immersed into the domain D of the volume
V in the actual state, then we admit that one may pass continuously from
0
D to D , by
means of the geometric transformation (1.1.75); we admit also that the inverses of these
functions
()
=
00
123
,,
ii
xxxxx
,
=
1, 2, 3i
,
(1.1.75''')
are univocally determined (in particular,
(
)
0000
0
123
,,;
ii
xxxxxt= ). The functions
(1.1.75''') are univocally determined, at least in a neighbourhood of the considered point,
if and only if the functions (1.1.75) are of class
1
()CD and the Jacobian (1.1.75') does
not vanish in this domain. This hypothesis is known as the
continuity axiom, which
expresses the
indestructibility of matter. A domain to which corresponds a finite
positive volume cannot be transformed in a domain of zero or infinite volume; this
implies also the
impenetrability of matter. The motion (1.1.75) or (1.1.75''') transforms
each domain in a domain, each surface in a surface and each curve in a curve. We admit
that the domain
0
D is limited by a sufficiently regular surface
0
S , which verifies, for
instance, conditions of the Lyapunov type. The equations (1.1.75) lead to the surface
S ,
which is the frontier of the domain
D and the image of
0
S by this transformation; this
surface also verifies conditions of Lyapunov’s type.
We admit that the variables
0
i
x ,
=
1, 2, 3i , corresponding to the domain
0
D (in the
initial state), are independent variables, and call them
Lagrange co-ordinates (or
material co-ordinates); this denomination was given because, in the phenomenon to
study, a point of the continuous mechanical system is followed in its motion. They are
referential co-ordinates; indeed, they give the position of the point with respect to the
initial state, considered as a frame of reference. In such a formulation, the co-ordinates
of the domain
D
(the material continuum in the actual state) are the unknown functions
of the problem, which must be determined. As well, we may consider variables
i
x ,
= 1, 2, 3i , as independent variables, calling them Euler co-ordinates (or spatial
Newtonian model of mechanics
35
co-ordinates); one has given this denomination because, at a point in space, there are
observed points of the continuous mechanical system which pass through this spatial
position in their motion. The unknown functions can be, for instance, the components of
the velocity at this point.
1.1.10 Classification of bodies
We have seen at Subsec. 1.1.8 that bodies can be modelled as mechanical systems
(discrete or continuous). In the case in which the mutual distances of all pairs of points
of a mechanical system remain invariant in time, we say that we have to do with a
non-
deformable mechanical system
(in particular, a rigid solid, which is a non-deformable
continuous medium); otherwise, we have to do with a
deformable mechanical system (in
particular, a
deformable continuous medium).
The deformable continuous media may be
deformable solids (which change little
their form under external loads, for instance under the action of forces) or
fluids (which
change very much their form, taking the form of the surrounding bodies, under the
action of external loads). The fluids may be
liquids (which change little their volume) or
gases (which change very much their volume, being expansive). The boundaries of
these classical types of continuous deformable media cannot be perfectly settled (as one
could expect from the definitions given above), because there exist media which have
simultaneously, for instance, properties of a solid body as well as properties of a liquid
one (in the same physical conditions).
Figure 1.15. Curved bar (a). Thin walled bar (b). Thread (c).
In what concerns the deformable solids, one can put in evidence the properties
of
elasticity (if the causes which have led to the deformation of the solid cease their
action, then this one returns to its initial form; the deformation is reversible),
plasticity
(if, after moving off the causes which have led to the phenomenon of deformation, one
obtains a permanent deformation) and
viscosity (variation of the deformation as a
function of time); we mention thus elastic solids, elastoplastic solids, viscoelastic solids,
elastoviscoplastic solids a.s.o. The fluids can have also properties of elasticity and
viscosity, justifying thus the affirmation made above concerning bodies which can have
simultaneously properties corresponding to the two states of aggregation.
We mention also that a fourth state of aggregation of matter has been put in evidence:
the plasma. This is a state of the matter at high temperature; it is piecewise
electroconductive and in average neutral. Matter is thus a mixture of particles (some of
them have a positive or negative electric charge, and other ones are neutral), which are
MECHANICAL SYSTEMS, CLASSICAL MODELS
36
directed along the force lines of a magnetic field. The plasma is thus a deformable and
electroconductive continuous (or discrete) medium (for instance, a gas piecewise or
totally ionized).
If the body does not change its volume during the motion, then we say that it is
incompressible; this is an approximation of the physical reality. In general, the bodies
are compressible. We make now a classification (a modelling) of the deformable solids
according to their dimensions.
Thus, the bodies which have a dimension (the length) much more longer than the
other two dimensions (corresponding to the cross section) are called
bars. We will give
a constructive definition of this notion. Let be a curve
Γ (the axis of the bar) of finite
length
l
. In the plane normal to
Γ
at the point
∈
P Γ
, let us consider a closed curve
C , bounding a plane domain D (the cross section of the bar); we suppose that the
centre of gravity of the domain
D is at the point P . If the point P describes the curve
Γ
, then the curve
C
, which may be deformable, generates a surface, the boundary of a
three-dimensional domain, support of a body called
bar (Fig.1.15,a). Corresponding to
its axis, a bar may be
straight or curved; the last one can be a three-dimensional curved
bar
or a plane curved bar. The two (mean) dimensions a and
b
of the cross-section are
considered of the same order of magnitude, with the condition
,ab l . If all three
dimensions are of different order of magnitude
(
)
abl , we have to do with thin
walled bars
(Fig.1.15,b). Finally, if the two dimensions of the cross-section are
completely negligible with respect to the length of the bar, so that this one be perfectly
flexible and torsionable (without opposition to bending or torsion), then we obtain a
thread (Fig.1.15,c).
Figure 1.16. Plate (a). Thin plate (b). Plate of mean thickness (or thick plate) (c). Membrane (d).
The body, a dimension (the thickness) of which is much smaller than the other two
dimensions (corresponding to the middle surface) is called a
plate. Let be given an
arbitrary surface
S (the middle surface of the plate) of finite area. Along the normal to
S at a point ∈PS, let us consider a segment of length h (the thickness of the plate),
the middle of which is on
S , at the same point P . If the point P describes the surface
S , then the extremities of this segment, which may be of variable length, generate two
surfaces, boundary of a three-dimensional domain, support of a body called
plate
(Fig.1.16,a). Corresponding to the form of the middle surface, the plates may be
plane
(denominated simply
plates) or curved (denominated shells). The ratio between the
Newtonian model of mechanics
37
(mean) dimensions
a and b of the middle surface and the thickness h of the plate
leads to:
thin plates (for
,hab
) (Fig.1.16,b), plates of mean thickness and thick
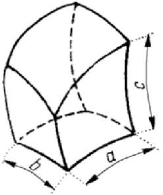
Figure 1.17. Block.
plates
(for which < ,hab) (Fig.1.16,c). We observe that one cannot make a very good
delimitation between these categories of plates; they depend on the possibilities of
computation of the states of stress and strain, and can be different from case to case.
Finally, if the thickness
h is completely negligible with respect to the other two
dimensions, so that the plate is perfect flexible, then we obtain a
membrane (Fig.1.16,d).
The bodies for which all three dimensions
a ,
b
and c are of the same order of
magnitude are called
blocks (Fig.1.17).
Generally, the real bodies have as supports finite three-dimensional domains. But we
will consider also infinite domains, the study of which present a special interest; indeed,
such domains are ideal models for real cases which one may often encounter in practice
or may be used as intermediary steps in solving problems for other domains.
1.1.11 Force. Field. Classification and representation of forces. Internal forces
Another element appearing in the mathematical modelling of a mechanical
phenomenon is the cause which yields the mechanical motion, being mentioned in
previous subsections. From a mechanical point of view, bodies are acting one on the
other and often it is difficult to put in evidence the physical nature of such an action; in
general, it received the name of
force. This denomination, resulting from the action of
the human being on the external world, gets a special meaning in mechanics; it is a
measure for the transmission of motion. The origin of forces is not always of
mechanical nature, but the goal of mechanics is not to determine their nature; mechanics
admits that forces are given.
Taking into account the property of inertia of a material point, its natural state is the
state of rest or uniform rectilinear motion; the force is the cause which is changing this
state. It appears thus the connection between the force and the variation of the velocity
(or of the momentum). We have seen in Subsec. 1.1.6 that the momentum is a measure
of the mechanical motion, remaining constant if the mechanical system is not acted
upon by another mechanical system (e.g., the case represented by relation (1.1.26)); if
the mechanical system is subjected to such an action, then appears a variation of the
momentum, hence a variation of the velocity (an acceleration). Thus, the force
F
applied to a point of the mechanical system is a vector quantity (as well as the variation
of the momentum to which it corresponds). From the experiments, it follows that – in
the most general case – the force may be modelled by a bound vector of the form
MECHANICAL SYSTEMS, CLASSICAL MODELS
38
(
)
=
FFrv;;t ,
(1.1.80)
where
r is the position vector of the point of application (belonging to the mechanical
system), while
v is its velocity; in components, we have
()
=
123123
,,,,,,;
ii
FFxxxvvvt,
=
1, 2, 3i .
(1.1.80')
The force corresponds to the interaction of bodies and is emphasized in various
manners; thus, we distinguish between
contact actions and actions at distance. The
action of a homogeneous sphere, which is in collision with another homogeneous sphere
(case considered in Subsec. 1.1.6), is a contact action. The force by which the Earth acts
upon material bodies, in such a way that they fall on it, represents an action at distance.
Such an action at distance is called a
field. In general, a field is a domain D of the
space, which constitutes a zone of influence of a mechanical system
S or of a certain
mechanical phenomenon; in the presence of
S , the domain D acquires a special state,
so that the evolution of any other mechanical system, which has properties permitting to
be influenced by
D and passing through D , is changed. For instance, by its property
of mass or of electrical charge, a body generates a gravitational or an electric field,
respectively; any other body, which passes through such a field, is influenced in its
motion. In a continuous model of mechanics, the action of such a field upon a
mechanical system is characterized by a force; it is supposed that this action is
instantaneously propagated (otherwise, one must introduce a factor of delay in the
mathematical modelling of the phenomenon). So, we do not introduce in computation
the real action, which took place with a time lag. In a non-classical model, the
hypothesis of propagation step by step is used; indeed, the experience shows that no
action is propagated instantaneously. In fact, the hypothesis of the instantaneous
propagation corresponds to the hypothesis of the universal (absolute) time.
Modelling the force by a bound vector (1.1.80) (it is characterized by direction,
intensity (modulus) and point of application, properties corresponding to an intrinsic
definition of such a mathematical entity), this one will enjoy all the properties of bound
vectors (for instance, the summation of vectors). So, the action of two forces applied at
a point of the mechanical system
S can be replaced by the action of only one force
applied at the same point, along the diagonal of the parallelogram formed by the
mentioned forces; the reciprocal of this affirmation is, obviously, true: the action of a
force at a point can be replaced by the action, at the very same point, of two forces
representing the sides of the parallelogram, the diagonal of which is the given force.
Attaching to each point (of position vector
r ) of a domain D a vector F , at any
moment, we obtain a
field of forces of the form (1.1.80). If
F
does not depend
explicitly on
t
()
∂∂==FF0/ t
, then the field of forces is called stationary. In fact,
for any field and any mechanical phenomenon, which have this property, the same
denomination is used.
Because the forces are modelled by bound vectors, we may consider also
systems of
forces
(discrete systems) in action upon a mechanical system (discrete or continuous),
which will be modelled by systems of bound vectors; obviously, all the results obtained
for these systems of vectors may be used for the corresponding systems of forces. Let
{}
≡=F , 1, 2,...,
i
inF be such a system of forces; it corresponds rigorously to a
Newtonian model of mechanics
39
discrete mechanical system. In the case of a continuous mechanical system, the support
of which is the domain
D
, the system F represents only an approximate modelling of
the physical reality. If the subdomain
⊂ DD , to which the load is transmitted, has
negligible dimensions with respect to the dimensions of the domain
D , its localization
can be punctual; in this case, the load is called
concentrated (or punctual). If at least one
of the dimensions of the subdomain
D cannot be neglected, the load is called
distributed (or continuous); one considers that it is transmitted continuously to the
respective subdomain. We may thus define
linear, superficial or volume loads, the
intensity of which is proportional to the elements of line, area or volume, respectively.
A distributed load constitutes a vector field, the geometric support of which is the
subdomain to which the load is transmitted.
The forces acting upon a mechanical system may be
external forces, which can
represent the action of other systems on the given one (eventually the action of systems
of non-mechanical nature, e.g., temperature fields, electromagnetic fields, fields of
radiation etc.), or
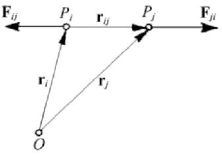
internal forces, which represent the action of certain points of the
given system upon other points of the same system (these forces can also be of non -
mechanical nature). Let be the points
i
P and
j
P of the given system; the force
ij
F will
represent the action of the point
j
P upon the point
i
P , having the support
ij
PP
(
=F
ij i j
PPλ
J
JJJG
, λ scalar). We introduce also the internal force
j
i
F , defined analogously;
these forces appear always as a pair and are linked axiomatically by the relation
(Fig.1.18)
Figure 1.18. Internal forces
ij ji
= −FF.
+
=FF 0
ij ji
.
(1.1.81)
1.1.12 Conservative forces
Upon a mechanical system (discrete or continuous) can act a field of forces, which
may be conservative or non-conservative.
The conservative forces (which derive from a
potential) are modelled by conservative vectors, expressed in the form
==∇=Fi
,
grad
j
j
UUU,
=
,
j
j
FU,
(1.1.82)
where
()
=
=r
123
() , ,UU Uxxx is the force function (potential function or
potential). One can have
()
(
)
=
=r
123
;,,;UU t Uxxxt in the representation (1.1.82);
the function is called
quasi-potential, and the forces are quasi-conservative in this case.