Teodorescu P.P. Mechanical Systems, Classical Models Volume I: Particle Mechanics
Подождите немного. Документ загружается.


MECHANICAL SYSTEMS, CLASSICAL MODELS
522
1
() () () ()Lqt Rqt qt Et
C
++ =
, 0t > ,
(8.2.58)
corresponding to Kirchhoff’s second law. Cauchy’s problem for this circuit consists in
the determination of the function
()qt which satisfies the equation (8.2.58) for 0t >
and the initial conditions
Figure 8.49. Electro-mechanical analogy.
0
(0)qq
=
,
0
(0)qi
=
,
(8.2.58')
where
0
q and
0
i are the charge and the intensity of the current at the moment 0t = ,
respectively. The correspondence
Lm→ , Rk
′
→ , 1/Ck→ , () ()Et Ft→ ,
() ()qt xt→ , () ()it xt→ leads to an interesting electro-mechanical analogy, which
allows an experimental determination of the corresponding mechanical quantities.
2.2.11 Case of an arbitrary perturbing force
We consider first of all the non-damped motion with arbitrary perturbing forces,
governed by an equation of the form (8.2.42), in case of elastic forces of attraction, or
of the form
2
()xxftω−=
(8.2.59)
in case of repulsive elastic forces. The fundamental solution of the operator
22 2
1
Dd/dt ω=+ is
1
sin
() ()
t
Et t
ω
θ
ω
= , 0ω > ,
(8.2.60)
where
()tθ is Heaviside’s distribution. As well, the distribution of function type
2
1
() e
2
t
Et
ω
ω
−
=− , 0ω > ,
(8.2.61)
is the fundamental solution of the operator
22 2
2
Dd/dt ω=−; this distribution is
generated by a continuous and everywhere differentiable function, excepting the origin.
Using the considerations in App., Subsec. 3.3.1, we may write
D() ()
ii
Et tδ= ,
Dynamics of the particle in a field of elastic forces
523
1, 2i =
, where ()tδ is Dirac’s distribution. If to the particular fundamental solution
2
()Et, the support of which is the real axis, we add the solution e/2
tω
ω , 0ω > ,
corresponding to the homogeneous equation, then we find the fundamental solution
2
sinh
() ()
t
Et t
ω
θ
ω
= ,
0ω >
,
(8.2.61')
the support of which belongs to the interval
[0, )
∞
; hence
22
D() ()Et tδ= . Denoting
generically by
()Et
+
the fundamental solution corresponding to one of the two cases,
we may write – for an arbitrary load
()
f
t – the solution
() () ()xt E t ft
+
=
∗ ,
(8.2.62)
in distributions, where we have introduced the convolution product. If
()
f
t is an
integrable function, it results
() () ( )d () (, )dxt ftE t ftGtττ ττ
+∞ +∞
+
−∞ −∞
=−=
∫∫
, 0t ≥ ,
(8.2.62')
where
(, )Gtτ is Green’s function corresponding to one of the equations (8.2.42),
(8.2.59).
Let us put initial conditions of the form
0
00
lim ( )
t
xt x
→+
=
,
0
00
lim ( )
t
xt v
→+
=
,
(8.2.63)
in case of a problem of Cauchy type. By a prolongation with zero for
0t <
, we
introduce the functions
() ()()xt txtθ= , () () ()
f
ttftθ= ;
(8.2.64)
in this case, the equation (8.2.42), which is written for
0t ≥ , is of the form
2
2
2
d
() () ()
d
xt xt f t
t
ω+=
,
where the sign “tilde” corresponds to the differentiation in the usual sense. Using the
formula (1.1.50), we notice that
0
dd
() () ()
dd
xt xt x t
tt
δ=+
,
2
2
00
22
dd
() () () ()
dd
xt xt v t x t
tt
δδ=++
,
so that one obtains
2
00
() () () () () ()xt xt f t v t x t qtωδδ+=++=
,
(8.2.65)
MECHANICAL SYSTEMS, CLASSICAL MODELS
524
in distributions, where the differentiation takes place in the sense of the theory of
distributions. The formula (8.2.62) allows to write
00
1
() ()sin () () ()xt t t f t v t x tθω δ δ
ω
=∗++
⎡
⎤
⎣
⎦
,
where we took into account (8.2.60). Effecting the convolution products, it results
0
0
1
() ()sin () ()cos ()sin
v
xt t t f t x t t t tθω θ ωθω
ωω
=∗++
,
(8.2.65')
while, if
()
f
t is a locally integrable function, then we get
0
0
0
1
() cos sin ( )sin ( )d
t
v
xt x t t f tωω τωττ
ωω
=++ −
∫
, 0t ≥ ;
(8.2.65'')
the integral which intervenes is known as the Duhamel integral. If the perturbing force
is a shock at the initial moment, then we have
0
() ()
f
tftδ
=
,
(8.2.66)
where
0
f
is a quantity the dimension of which is that of a velocity (dimensionally
[
]
1
() Ttδ
−
= ); we obtain
00
0
() ()cos ()sin
f
v
xt x t t t tθω θω
ω
+
=+ .
(8.2.66')
We thus notice that the apparition of a shock at the initial moment is equivalent to the
introduction of a supplementary initial velocity.
Considering the same problem for the equation (8.2.59), written in the form
2
() () ()xt xt qtω−=
,
(8.2.67)
it results, analogously,
0
0
1
() ()sinh () ()cosh ()sinh
v
xt t t f t x t t t tθω θ ωθω
ωω
=∗++
;
(8.2.67')
if
()
f
t is a locally integrable function, then we get
0
0
0
1
( ) cosh sinh ( )sinh ( )d
t
v
xt x t t f tωωτωττ
ωω
=++ −
∫
,
0t ≥
.
(8.2.67'')
As well, in case of a perturbing force of the form (8.2.66), we have
00
0
() ()cosh ()sinh
f
v
xt x t t t tθω θω
ω
+
=+ ,
(8.2.66'')
Dynamics of the particle in a field of elastic forces
525
and we obtain a result analogous to that above.
In case of a bilocal problem, we put conditions of the form
11
()xt x
=
,
22
()xt x
=
,
(8.2.68)
assuming that
[
]
12
,ttt∈ . In case of Cauchy type conditions for
1
tt
=
, we may write
1
1
11 1
1
() cos ( ) sin ( ) ( )sin ( )d
t
t
v
xt x t t t t f tωω τωττ
ωω
=−+−+ −
∫
,
considering an elastic force of attraction and assuming that
()
f
t is a locally integrable
function. The second bilocal condition (8.2.68) leads to
2
1
1
2 1 21 21 2
1
cos ( ) sin ( ) ( )sin ( )d
t
t
v
xx tt tt f tωω τωττ
ωω
=−+−+ −
∫
,
so that we can determine the velocity
1
v at the initial moment; eliminating this velocity
between the last two relations, one obtains the solution of the bilocal problem in the
form
{
1
21
21
1
() sin ( ) ( )sin ( )d
sin ( )
t
t
xt t t f t
tt
ωτωττ
ωω
=−−
−
∫
[
2
1
1212
sin ( ) ( )sin ( )d sin ( )
t
t
tt f t x t tωτωττωω−− −+ −
∫
]
}
21
sin ( )xttω+−
,
21
ttk
π
ω
≠+
, k
∈
` .
(8.2.69)
In case of a repulsive elastic force, it results
{
1
21
21
1
( ) sinh ( ) ( )sinh ( )d
sinh ( )
t
t
xt t t f t
tt
ωτωττ
ωω
=−−
−
∫
[
2
1
1212
sinh ( ) ( )sinh ( )d sinh ( )
t
t
tt f t x t tωτωττωω−− −+ −
∫
]
}
21
sinh ( )xttω+−
(8.2.69')
for the same bilocal problem.
In the general case of a law of motion of the form
()mx k x kx F t
′
+
+= ,
(8.2.70)
where
k−∞ <
, k
′
<∞, which corresponds to all possibilities of motion previously
considered, we put Cauchy’s problem in the form (8.2.63). By a prolongation with zero
for
0t <
, of the form (8.2.64),
() () ()Ft tFtθ=
(8.2.64')
MECHANICAL SYSTEMS, CLASSICAL MODELS
526
and taking into account the connection between the derivatives in the usual sense and in
the sense of the theory of distributions for the regular distributions thus obtained, we
may write, as above, the corresponding equation in distributions
00 0
() () () () ( )() () ()mx t k x t kx t F t mv k x t mx t Q tδδ
′′
++=++ + =
,
(8.2.70')
which includes the initial conditions. The solution of this problem is given by
() () ()xt Et Qt
=
∗ ,
(8.2.71)
where
()Et is the fundamental solution in the sense of the theory of distributions,
which verifies the equation
() () () ()mE t k E t kE t tδ
′
++=
.
(8.2.71')
Applying the Laplace transform in distributions, we obtain
(
)
[
]
2
() 1mp k p k L E t
′
+
+=,
where
p
is the new variable in the space of transforms; it results
[]
2
12
11
L()
()()
Et
mp p p p
mp k p k
==
−−
′
++
,
1
p αβ=− + ,
2
p αβ
=
−−,
2
k
m
α
′
= ,
2
2
kk
mm
β
′
⎛⎞
=−
⎜⎟
⎝⎠
.
Three cases of integration are thus put in evidence. If
2
4kkm
′
>
,
(8.2.72)
then we may write (
2
0β > , β
∈
\ )
[]
12
11 1
L()
2
Et
mpp ppβ
⎛⎞
=−
⎜⎟
−−
⎝⎠
,
wherefrom
()
12
()
1
() e e ()e sinh
2
pt pt t
t
Et t t
mm
α
θ
θβ
ββ
−
=−= .
(8.2.72')
After effecting the convolution products, the solution (8.2.71) takes the form
000
11
( ) ( )e sinh ( ) ( )e cosh ( )sinh
tt
xt t t Ft t x t v x t
m
αα
θβθ βαβ
ββ
−−
⎡
⎤
=∗+ ++
⎢
⎥
⎣
⎦
;
(8.2.73)
Dynamics of the particle in a field of elastic forces
527
if
()Ft is a locally integrable function, then we can write
000
1
() e cosh ( )sinh
t
xt x t v x t
α
βαβ
β
−
⎡⎤
=++
⎢⎥
⎣⎦
0
1
()esinhd
t
Ft
m
ατ
τβττ
β
−
+−
∫
, 0t ≥ .
(8.2.73')
If
0k
′
> , then we denote 0αλ
=
> (viscous damping), while if 0k
′
< , then we
denote
0αλ
=
−< (self-sustained oscillations). If 0k > (elastic forces of attraction),
then we denote
2
/km ω=
, βω
′
′
=
(
22
λω> ), while if 0k
<
(repulsive elastic
forces), then we denote
2
/km ω−=, βω
=
. We pass thus to the notation previously
used.
If
2
4kkm
′
<
(8.2.74)
and
2
0β < ,
β ∈ ^
, iβω
′
=
,
2
22
2
kk
mm
ωωλ
′
⎛⎞
′
=− = −
⎜⎟
⎝⎠
,
then we may write (one can have only
0k > , hence elastic forces of attraction)
1
() ()e sin
t
Et t t
m
α
θω
ω
−
′
=
′
;
(8.2.74')
the solution of Cauchy’s problem is
000
11
() ()e sin () ()e cos ( )sin
tt
xt t t Ft t x t v x t
m
αα
θωθ ω αω
ωω
−−
⎡
⎤
′
′′
=∗+++
⎢
⎥
′′
⎣
⎦
(8.2.75)
and, in the case in which
()Ft is a locally integrable function, we obtain
000
1
() e cos ( )sin
t
xt x t v x t
α
ωαω
ω
−
⎡⎤
′
′
=++
⎢⎥
′
⎣⎦
0
1
()esind
t
Ft
m
ατ
τωττ
ω
−
′
+−
′
∫
, 0t ≥ .
(8.2.75')
If
2
4kkm
′
=
,
(8.2.76)
then we have
0β = , so that
[
]
2
L() 1/( )Et mp α=+; the fundamental solution is
1
() ()e
t
Et tt
m
α
θ
−
= .
(8.2.76')
MECHANICAL SYSTEMS, CLASSICAL MODELS
528
The solution of the boundary value problem reads
[]
00 0
1
() ()e () ()e ( )
tt
xt tt Ft t x v x t
m
αα
θθ α
−−
=∗+ ++,
(8.2.77)
while if
()Ft is a locally integrable function, then we get
[]
00 0
0
1
() e ( ) ( )e d
t
t
xt x v x t Ft
m
αατ
ατττ
−−
=+++ −
∫
,
0t ≥
.
(8.2.77')
According to the above relations, for the last two cases we obtain a viscous damping or
self-sustained oscillations for
αλ
=
± , respectively.
In the particular case of homogeneous initial conditions (
00
0xv
=
= ) we remain
only with the first terms of the formulae (8.2.73), (8.2.75) and (8.2.77).
The vibratory phenomena considered above, for which the parameters
,,mkk
′
are
constant, are – in general – in permanent régime. Such phenomena may be due, for
instance, to a perturbing force, which is applied at the initial moment and remains
constant in time, of the form
0
() ()Ft F tθ= ;
(8.2.78)
we obtain thus
[]
[]
[]
0
2
0
2
0
2
e ( sinh cosh ) for 4 ,
( ) 1 (1 )e for 4 ,
e ( sin cos ) for 4 ,
t
t
t
F
tt kkm
k
F
xt t k km
m
F
tt kkm
k
α
α
α
αββ ββ
β
α
α
αωωω ω
ω
−
−
−
⎧
′
−+−>
⎪
⎪
⎪
′
=−+ =
⎨
⎪
⎪
′
−+−<
⎪
⎩
(8.2.78')
for
0t ≥ . Passing from a permanent régime to another one, a transitory phenomenon
takes place; for instance, the transitory phenomena appear by the introduction or by the
elimination of a perturbing force, as well as – in general – by any variation of the
parameters of the considered phenomena. E.g., in case of a shock at the initial moment,
given by
0
() ()Ft F tδ
=
,
(8.2.79)
we obtain
0
2
0
2
0
2
e sinh for 4 ,
( ) e for 4 ,
e sin for 4 ,
t
t
t
F
tkkm
m
F
xt t k km
m
F
tkkm
m
α
α
α
β
β
ω
ω
−
−
−
⎧
′
>
⎪
⎪
⎪
′
==
⎨
⎪
⎪
′′
<
⎪
′
⎩
(8.2.79')

Dynamics of the particle in a field of elastic forces
529
for
0t ≥ ; this result corresponds to the fundamental solutions (8.2.72'), (8.2.76') and
(8.2.74'), as well as to the velocity which appears in the previously considered case (it is
obtained by differentiating the formula (8.2.78') with respect to time).
2.2.12 Oscillations with variable characteristics
The oscillations with variable characteristics (parametric oscillations) are the
oscillations of a mechanical system the parameters of which (mass, frequency,
dimensions, elastic coefficient, damping coefficient etc.) are functions of time. In the
absence of a perturbing force, the mathematical model of such a mechanical
phenomenon leads to a differential equation of the form
() () 0xtxtxαβ
+
+= ,
(8.2.80)
where
()tα and ()tβ are periodic functions. By the substitution
(1/2) ( )d
() ()e
tt
xt ut
α−
∫
=
,
we obtain the equation
() 0utuγ+= ,
2
11
() () () ()
24
tt t tγβ α α=− − .
(8.2.81)
To deduce the aspect of the solution or to find an approximate solution of this
equation may be a different task from case to case. The general solution can be written
in the form
() e () e ()
tt
ut t t
λμ
ϕψ=+,
(8.2.81')
where the coefficients
λ and μ are characteristic coefficients of the equation, while
()tϕ and ()tψ are periodic functions of period T (as well as the function ()tγ ),
which have to be determined. One may put the condition
()()ut T kut
+
= ,
(8.2.81'')
where
(, )kkλμ
=
. Thus, if we know the motion during a period, then the motion in
the following period is obtained by multiplying the elongation of the first period by the
factor
k a.s.o. If 1k < , then the elongations tend to zero and the oscillations are
damped; if
1k > , then the elongations increase in time and the motion becomes
instable.
For instance, in case of a mathematical pendulum of variable length
()llt= , the
equation of motion which specifies the generalized co-ordinate
()tθθ
=
is
()
2
d
sin 0
d
lgl
t
θθ
+
=
;
(8.2.82)
MECHANICAL SYSTEMS, CLASSICAL MODELS
530
in case of small oscillations, we obtain the equation
()
20
() ()
lt
g
lt lt
θθθ++=
.
(8.2.82')
2.2.13 Non-linear oscillations
We say that a mechanical system represents a non-linear oscillatory system if, in the
differential equation of motion, one or several characteristic parameters (mass, elastic
coefficient, frequency etc.) depend on the displacement
x . In general, the differential
equation of these oscillations is of the form
(,;) 0xfxxt
+
= ,
(8.2.83)
resulting from Newton’s equation (which puts in evidence the linkage between the
elastic force and the displacement) or, in particular, of the form
(,) 0xfxx
+
= ,
(8.2.83')
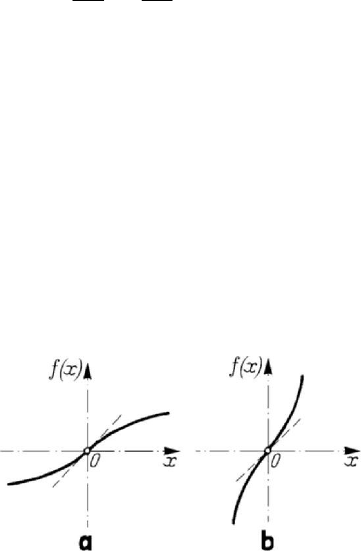
Figure 8.50. Non-linear vibrations determined by the equation () 0xfx
+
=
; diagrams
()fx vs
x
for
0x >
: case () 0fx
′
′
<
(a); case () 0fx
′
′
> (b).
as the non-linear vibration is non-autonomous or autonomous, respectively. If the non-
linear term depends only on
x , then the function ()
f
x which intervenes is called arc
characteristic; the most times, in practice, the graphic of the function
()
f
x is
symmetric with respect to the origin (
()
f
x is an odd function, that is ()
f
x−
()
f
x=− ). If the graphic of the function ()
f
x has the concavity towards down in the
vicinity of the origin for
0x > , hence if () 0
f
x
′
′
<
(Fig.8.50,a), then the arc
characteristic is weak, while if, in the same vicinity, the graphic of the function
()
f
x
has the concavity towards up for
0x > , hence if () 0
f
x
′
′
>
(Fig.8.50,b), then the arc
characteristic is strong.
In case of great oscillations of the simple pendulum, the non-linear character of the
phenomenon is put into evidence in the equation (7.1.38'). Developing
sin θ into a
power series, we obtain, in a first approximation, the linear differential equation
(7.1.45). In a second approximation (non-linear approximation, in which we take two
terms in the series development), we may write
Dynamics of the particle in a field of elastic forces
531
3
2
0
6
θ
θωθ
⎛⎞
+
−=
⎜⎟
⎝⎠
;
(8.2.84)
in this case,
(
)
23
() /6
f
θωθθ=− and
2
() 0
f
θωθ
′′
=
−< for 0θ > , the arc
characteristic being thus weak.
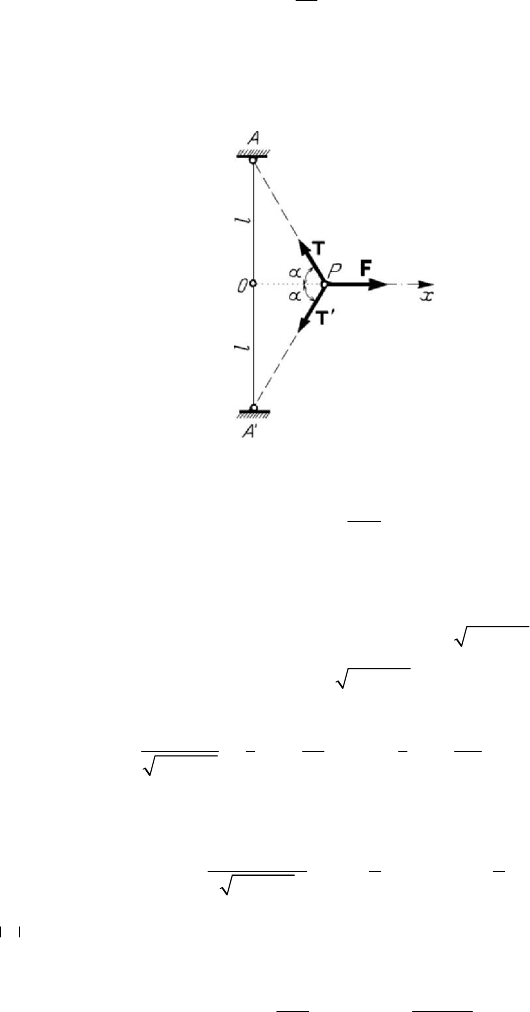
Figure 8.51. Motion of a particle situated at the middle of an elastic thread.
Let us consider also the case of a particle
P of mass m , situated at the middle of an
elastic thread fixed at the points
A and A
′
, 2AA l
′
=
(e.g., the case of a training ball
for boxing); in the position
O of stable equilibrium, the tension in the thread is
0
T (we
suppose that the thread is tensioned). Perturbing the position of equilibrium by a
displacement normal to
AA
′
, the particle reaches the position P (Fig.8.51), being
acted by the tensions
T and
′
T ,
(
)
22
0
TTTkl x l
′
=
=+ +−, and by the
perturbing force
F ,
22
2cos 2 /FT Txlxα== +. Observing that
1/2
22
22
22
11 1
11
2
xx
ll
ll
lx
−
⎛⎞ ⎛ ⎞
=+ ≅−
⎜⎟ ⎜ ⎟
⎝⎠ ⎝ ⎠
+
,
we obtain
(
)
3
0
00
22
2( )
22()
Tklx
xx
Fkx T klT
ll
lx
−
=+ ≅ +−
+
;
if
xl , then we remain only with the first term (the case of a linear elastic force). In
the non-linear case considered (the second approximation), the equation of motion is
3
20xx xαβ
+
+= ,
0
2
0
T
l
α
=
> ,
0
3
0
2
kl T
l
β
−
=
> ,
(8.2.85)