Teodorescu P.P. Mechanical Systems, Classical Models Volume I: Particle Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
492
()
()
2
1
lim e cosh lim e 1 e
2
ttt
tt
t
λωλω
ω
−−−−
→∞ →∞
=
+=∞;
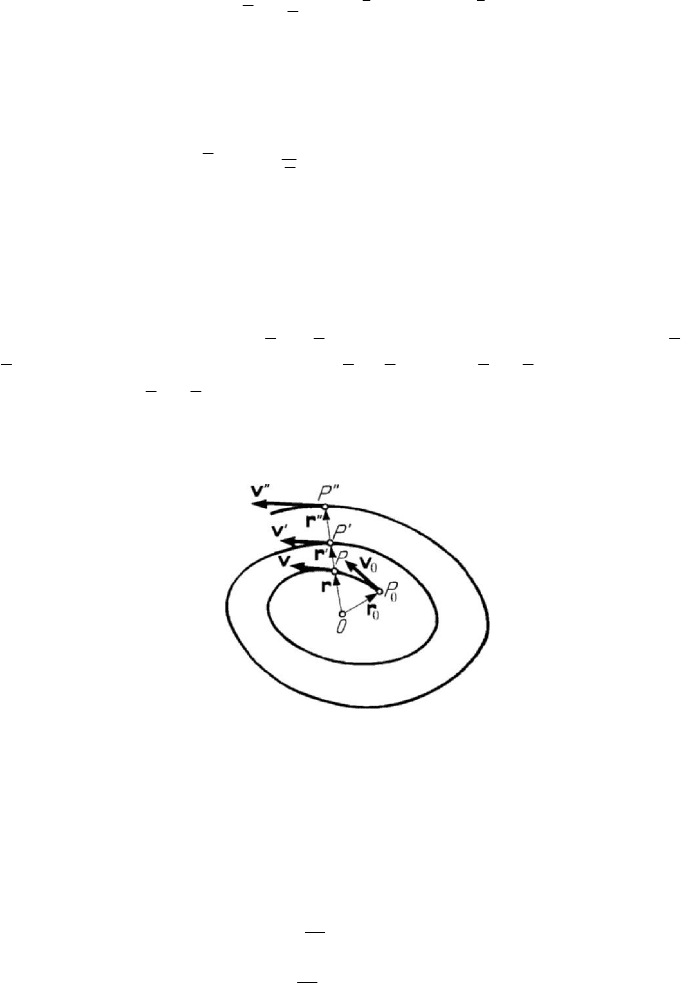
hence, the trajectory is similar to that in Fig.8.12 (the arc of hyperbola is deformed, the
radii being smaller), but it is travelled through with a smaller velocity. The asymptote to
which tends the trajectory is specified by the vector (Fig.8.14)
000
1
()λ
ω
=+ +
rr v r.
(8.2.18
iv
)
2.1.4 Self-sustained motions of a particle
Various types of motion considered in Subsecs 2.1.1 and 2.1.2 may be due to a given
perturbing force, the respective motion being a forced (sustained) motion. If the force
which maintains the motion is due to the motion itself, being of the form
k
′
=
rΦ ,
0k
′
> , then the motion is called a self-sustained motion; in fact, the force Φ is of the
form
′′′
+
ΦΦ, where k
′
′
=
−
rΦ , 0k
′
> , is a damped force, while k
′′ ′′
=
rΦ ,
0k
′′
>
, is a perturbing force, with
0kkk
′′′′
=
−>
(if
kk
′
′′
<
, then the motion is
damped, while if
kk
′′ ′
= , then the motion is non-damped). If the motion ceases, then
the corresponding force disappears. We observe that in a forced motion that force exists
independent of the motion and persists after its suppression.
Figure 8.15. Non-damped pseudoelliptic oscillator.
In case of an elastic force of attraction, the equation of motion is of the form
2
2λω
−
+=
rrr0,
(8.2.19)
where we use the notations of the preceding subsection. With the initial conditions
(8.2.5'), we obtain
000
1
() e cos ( )sin
t
tt t
λ
ωλω
ω
⎡⎤
′
′
=+−
⎢⎥
′
⎣⎦
rr vr
,
(8.2.19')
2
000
1
() e cos ( )sin
t
tt t
λ
ωωλω
ω
⎡⎤
′
′
=−−
⎢⎥
′
⎣⎦
vv rv
,
(8.2.19'')
where we have introduced the pseudopulsation (8.2.15''), assuming that
ωλ> . The
trajectory is a spiral and the particle is rotating around the centre
O in the same
Dynamics of the particle in a field of elastic forces
493
direction till infinity (Fig.8.15). After a pseudoperiod
2/T πω
′
=
, the particle returns
on the same half-straight line with a velocity which has always the same direction for
that line; the radii and the velocities are increasing in geometric progression of ratio
e
tλ
for the same half-straight line, the number
2/Tδλ πλω
′
=
= being a logarithmic
increment. The corresponding mechanical system may be called non-damped
pseudoelliptic oscillator; the respective motion of the particle is a pseudoperiodic non-
damped motion.
If
ωλ= , we may write
[
]
000
() e ( )
t
tt
λ
λ=+−rrvr,
[
]
000
() e ( )
t
tt
λ
λλ=+−vvvr,
(8.2.20)
while if
ωλ
<
we get
000
1
() e cosh ( )sinh
t
tt t
λ
ωλω
ω
⎡⎤
′
′′′
=+−
⎢⎥
′′
⎣⎦
rr vr
,
(8.2.21)
2
000
1
() e cosh ( )sinh
t
tt t
λ
ωωλω
ω
⎡⎤
′
′′′
=−−
⎢⎥
′′
⎣⎦
vv rv
,
(8.2.21')
where we used the notation (8.2.17). In both cases, one obtains an aperiodic non-
damped motion (Fig.8.14), the asymptote to which tends the trajectory being specified
by the vector
0
0
λ
=−
v
rr
,
(8.2.20')
in the first case, and by the vector
000
1
()λ
ω
=+ −
′′
rr v r,
(8.2.21'')
in the second case, respectively.
In case of a repulsive elastic force, it results the equation of motion
2
2λω
−
−=
rrr0
,
(8.2.22)
where we used the same notations as above. We obtain
000
1
() e cosh ( )sinh
t
tt t
λ
ωλω
ω
⎡⎤
=+−
⎢⎥
⎣⎦
rr vr
,
(8.2.22')
2
000
1
() e cosh ( )sinh
t
tt t
λ
ωωλ ω
ω
⎡⎤
=++
⎢⎥
⎣⎦
vv rv
,
(8.2.22'')
where we have put the initial conditions (8.2.5') and have introduced the notation
(8.2.18'''). The motion of the particle is an aperiodic non-damped motion too (Fig.8.14);
the trajectory tends to an asymptote specified by the vector
MECHANICAL SYSTEMS, CLASSICAL MODELS
494
000
1
()λ
ω
=+ −rr v r
.
(8.2.22''')
2.2 Mechanical systems with a single degree of freedom
Projecting the motion of an elliptic oscillator on an axis in the plane of the
corresponding trajectory, we obtain a linear oscillator, the most simple mechanical
system with a single degree of freedom. We pass then to the case of a damped oscillator
and to that of a sustained one. The phenomena of interference and of beats will be taken
into consideration too, as well as the superposition of effects, which leads to small
oscillations of a particle around a stable position of equilibrium.
2.2.1 Linear oscillator
We consider a particle acted upon by an elastic force with a fixed support, chosen as
Ox -axis (of the form ()Fx kx
=
− , 0k > ), modelled as in Fig.8.8. With the notations
in Subsec. 2.1.1, the equation of motion has the form
2
0xxω
+
= ;
(8.2.23)
with the initial conditions
0
(0)xx
=
,
0
(0)vv
=
,
(8.2.23')
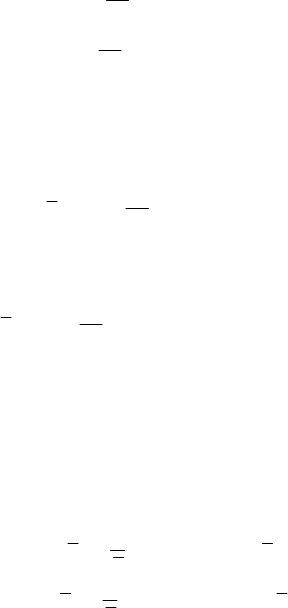
Figure 8.16. Linear oscillator: trajectory (a); diagram ()xt vs ()tb .
we may write
0
0
cos sin cos( )
v
xx t ta tωωωϕ
ω
=+=−,
(8.2.24)
00
cos sin sin( )vv t x t a tωω ω ω ωϕ=− =−−,
(8.2.24')
where
2
0
2
0
2
v
ax
ω
=+,
0
0
arctan
v
x
ϕ
ω
=
(8.2.24'')
Dynamics of the particle in a field of elastic forces
495
are the amplitude of the oscillation (maximal elongation, the elongation
x being the
distance from the centre of oscillation
O to the position of the particle at a given
moment) and the phase shift (the argument
tωϕ
−
represents the phase at the moment
t , the phase shift being calculated with respect to the phase tω ), respectively. The
trajectory is the segment of line
AA , which is travelled through back and forth in the
period of time (8.2.6), beginning with the initial position
0
P (Fig.8.16,a). We have thus
to do with oscillations around the oscillation centre
O , which is a stable position of
equilibrium. Because the period
T (and the frequency 1/Tν
=
) is independent on
the amplitude, it results that the free linear oscillations with a single degree of freedom
are isochronic; on the other hand, the interval of time
/4T in which the segment of
line
AO is travelled through does not depend on the initial position A (does not
depend on
a ), the velocity at that point vanishing, so that the motion is tautochronous
too.
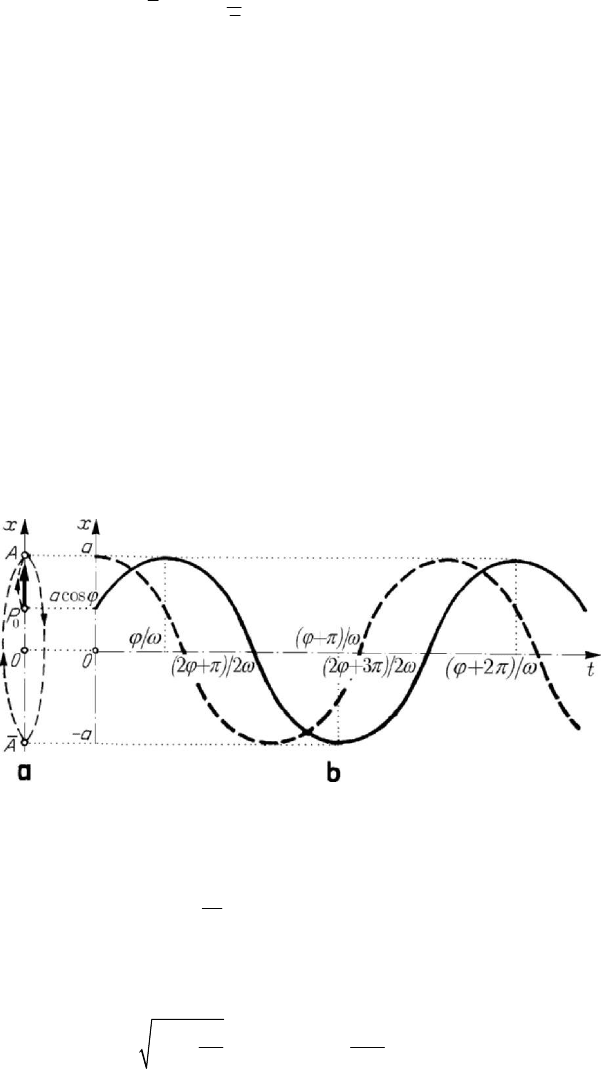
Figure 8.17. Linear oscillator as projection of a circular oscillator.
The mechanical system formed by a particle which describes a segment of a line,
subjected to the action of an elastic force is called linear oscillator; that one may be
also considered as a limit case of an elliptic oscillator, namely that in which one of the
semiaxes of the ellipse tends to zero. We notice that a linear oscillator may be obtained
too by projecting the motion of a circular oscillator (hence, of a particle
P
′
with a
velocity v of constant modulus
aω
=
v
, which is in uniform motion on a circle) on a
diameter
AA
of it (Fig.8.17); if the position of the diameter
AA
is specified by the
angle
ϕ with respect to the
1
Ox -axis and if the angle tθω
=
, where ω is the angular
velocity, gives the position of the radius
OP
′
, then we obtain the equation (8.2.24) of
the linear oscillator. Any mechanical system with only one degree of freedom subjected
to small oscillations around a stable position of equilibrium, e.g., the simple pendulum
subjected to small oscillations, may be modelled by a linear oscillator.
Multiplying the equation (8.2.23) by
mx , we obtain
(
)
22
d
d2 2
mk
mxx kxx x x
t
+= +
,
so that, taking into account (8.2.6'), (8.2.24) and (8.2.24'),
MECHANICAL SYSTEMS, CLASSICAL MODELS
496
2222
2
2
k
ETUTV a ma
πν=−=+= = ;
(8.2.23'')
it results that, during the non-damped free linear oscillations with a single degree of
freedom, a process of conservation of the mechanical energy takes place.
In general, a motion with a single degree of freedom of a mechanical system
represents a harmonic vibration (harmonic oscillation, the term of oscillation being
usually used if the particle returns always on the same trajectory) if it is of the form
(8.2.24); we mention also that the term of oscillation may be used also for non-
mechanical oscillations, but the term of vibration is used only for mechanical ones. The
diagram of the considered motion is represented in Fig.8.16,b by a unbroken line
(comparing with the dash line which corresponds to the vibration
cosxa tω=
, the
influence of the phase shift being thus put into evidence).
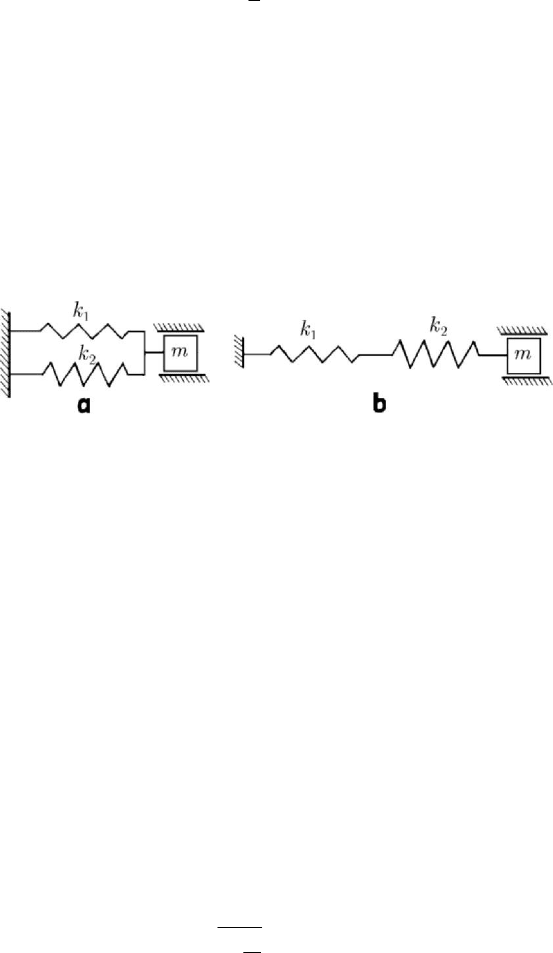
Figure 8.18. Model of a system of linear oscillators: parallel linkage (a); linkage in series (b).
Some vibrating mechanical systems may be physically modelled by a system formed
of several elastic elements, of negligible masses, linked between them; such a system
can be replaced, in general, by a single equivalent elastic element. In case of two
springs of elastic constants
1
k and
2
k , respectively, linked in parallel (Fig.8.18,a), the
condition that the total elastic force for a displacement
x be equal to the sum of the
forces corresponding to each spring (
12
kx k x k x
=
+ ) is put, wherefrom
12
kk k=+.
In case of
n springs linked in parallel, we may write ( /kn is an arithmetic mean)
1
n
i
i
kk
=
=
∑
.
(8.2.25)
If the two springs are linked in series (Fig.8.18,b), then the condition that the total
elongation
x of the spring be equal to the sum of the elongations
1
x and
2
x , of the
component springs, respectively, is put (
12
xx x
=
+ ), the force in the spring being the
same along it (
11 22
kx k x k x=+
); it results
12
1/ 1/ 1/kk k
=
+ . In case of n springs
linked in series, we obtain (
nk
is a harmonic mean)
1
1
1
n
i
i
k
k
=
=
∑
.
(8.2.25')
Dynamics of the particle in a field of elastic forces
497
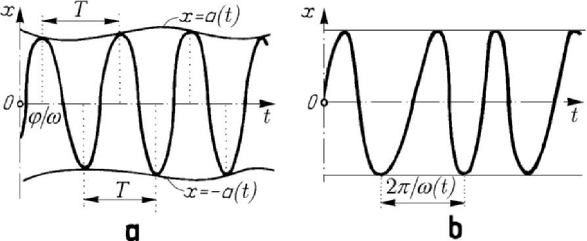
2.2.2 Modulated vibrations
In case of the motion of a mechanical system with a single degree of freedom, of the
form
() ()cos( )xt at tωϕ
=
− ,
(8.2.26)
we say that we have to do with a vibration modulated in amplitude; in general, we
assume that
()at varies little in the quasi-period 2/T πω
=
. The diagram of motion
(the trajectory of which is also a segment of a line, as in the preceding case) has the
aspect of a cosinusoid which is contained between the curves
()xat
=
± (Fig.8.19,a).
We notice that the function (8.2.26) and its derivative
() ()cos( )xt at tωϕ
=
−
()sin( )at tωωϕ−− have values equal to those of the functions () ()xt at=± and of
the respective derivatives
() ()xt at
=
± at the points of abscissae /t ϕω= ,
/tTϕω=+,… and //2tTϕω=+, /3/2tTϕω
=
+ ,…, respectively; hence,
the diagram of motion is tangent to the curves
()xat
=
± . The intervals between two
successive points of tangency are equal to
T , as well as the intervals between two
points in which the
Ot -axis is pierced in the same direction. The respective motion is a
quasi-periodic motion. Eventually, even the function
()xat
=
may be periodic.
Figure 8.19. Modulated vibration: in amplitude (a); in frequency (b).
If the motion is definite in the form
[
]
() cos ()xt a ttωϕ
=
− ,
(8.2.26')
then we say that it is a vibration modulated in frequency (or modulated in phase); in
general, one assumes that
()tω varies little in a pseudoperiod 2/()Ttπω
=
. We may
have, for instance,
0
() sinttωωεω=+ ,
0
/1εω . The diagram of motion has the
aspect in Fig.8.19,b.
2.2.3 Representations of harmonic vibrations
We have seen in Subsec. 2.2.1 that a harmonic vibration may be obtained by
projecting a circular oscillator on one of its diameters; this observation has led Fresnel
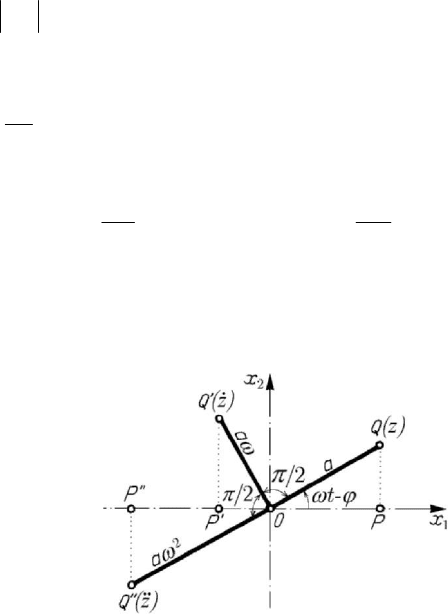
MECHANICAL SYSTEMS, CLASSICAL MODELS
498
to elaborate a vector method of representation of harmonic vibrations; this method is
particularly useful for the composition of these vibrations.
Thus, the harmonic vibration (8.2.24) may be represented by the vector
OQ
of
modulus
OQ a=
, the direction of which is given by the angle
tθω ϕ=−
, taken
counterclockwise from the
1
Ox
-axis, which represents the phase of motion; this vector
of constant modulus has a uniform rotation around the pole
O
, in positive or negative
sense, as the angular velocity
0ω ≷
. If the point Q is projected at
P
on the
1
Ox
-
axis, then
OP x=
(Fig.8.20). Observing that
sin( )xa tωωϕ=− − ,
2
cos( )xa tωωϕ=− − ,
it results the velocity
OP x
′
=
and the acceleration OP x
′′
=
, which correspond to a
vector
OQ
′
of modulus aω , the direction of which is obtained by rotating of /2π the
vector
OQ
counterclockwise or clockwise as 0ω ≷ or to a vector OQ
′′
of modulus
2
aω
, opposite to the vector OQ
, respectively.
Figure 8.20. Vector representation of harmonic vibrations.
If we assume that the above vector representation is made in the complex variables
plane, then to the point
Q , hence to the vector OQ
, there corresponds the variable
12
izx x=+
; we may thus write (Fig.8.20)
[]
i( )
cos( ) i sin( ) e
t
za t t a
ωϕ
ωϕ ωϕ
−
=−+−=
,
(8.2.27)
where
i
ea
ϕ
−
is the complex amplitude of the oscillation. Differentiating successively,
we obtain
[]
i( ) i( /2)
sin( ) i cos( ) ie e
tt
za t t a a
ωϕ ωϕπ
ωωϕ ωϕω ω
−−+
=− −+ −= =
,
(8.2.27')
[]
22i()
cos( ) i sin( ) e
t
za t t a
ωϕ
ωωϕ ωϕ ω
−
=− − + − =−
2i( )
e
t
a
ωϕπ
ω
−
+
=
,
(8.2.27'')
Dynamics of the particle in a field of elastic forces
499
finding again the points
Q
′
and Q
′
′
, respectively.
2.2.4 Composition of harmonic vibrations of the same direction. Interference.
Beats. Harmonic analysis
We consider first of all two harmonic vibrations
11 1
cos( )xa tωϕ=−,
22 2
cos( )xa tωϕ
=
− ,
which have the same direction and the same pulsation; their amplitudes and their phase
shifts may be different. By the composition of these vibrations (in case of acoustic or
light waves, the phenomenon is called interference too) we obtain also a harmonic
vibration
12
cos( )xx x a tωϕ=+= −, where
22
12 12 21
2cos( )aaa aa ϕϕ=++ −,
1122
1122
sin sin
arctan
cos cos
aa
aa
ϕϕ
ϕ
ϕϕ
+
=
+
.
(8.2.28)
The term
12 2 1
2cos( )aa ϕϕ− is called the term of interference and leads to an effect of
interference stripes. If
21
2nϕϕ π
−
= , n
∈
, then we obtain
12
aa a
=
+
, while if
21
(2 1)nϕϕ π−= + , n ∈ , then we have
12
aaa
=
− ; in the first case the
interference is constructive, while in the second one it is destructive. Finally, if
12
aa= , then the destructive interference leads to extinction (zones in which the sound
disappears, in case of acoustic waves, or zones of darkness, in case of light waves). If
21
/2nϕϕ π−= ,n ∈ , then
22
12
aaa=+,
(
)
12
arctan /aaϕ
=
. By composition
of a certain number of harmonic vibrations one may effect an analogous computation.
If the two harmonic vibrations have not the same pulsation, being of the form
11 1 1
cos( )xa tωϕ=−,
22 2 2
cos( )xa tωϕ
=
− ,
then their composition (by extension, the phenomenon bears the denomination of
interference too) leads to an expression of the same form, modulated both in amplitude
()()
[]
22
12 12 12 12
() 2 cosat a a aa tωω ϕϕ=++ − −−
(8.2.29)
and in phase
(
)
(
)
()()
12 12
1122
12 12
1122
sin sin
22
( ) arctan
cos cos
22
atat
t
atat
ωω ωω
ϕϕ
ϕ
ωω ωω
ϕϕ
−
−
−−+ +
=
−−
−+ +
,
(8.2.29')
where
(
)
12
/2ωωω
=
+ . The motion thus obtained is no more harmonic, its form
depending on the amplitudes, on the frequencies ratio, and on the phase shifts; it is a
periodic motion only if the periods of the two component motions have a common
MECHANICAL SYSTEMS, CLASSICAL MODELS
500
multiple, hence only if
11 22
2/ 2/nnπω πω
=
,
12
,nn
∈
or
12
/ nωω= ,
n ∈
(Figs.8.21, 8.22). The amplitude
()at has a variation between
min 1 2
aaa=− and
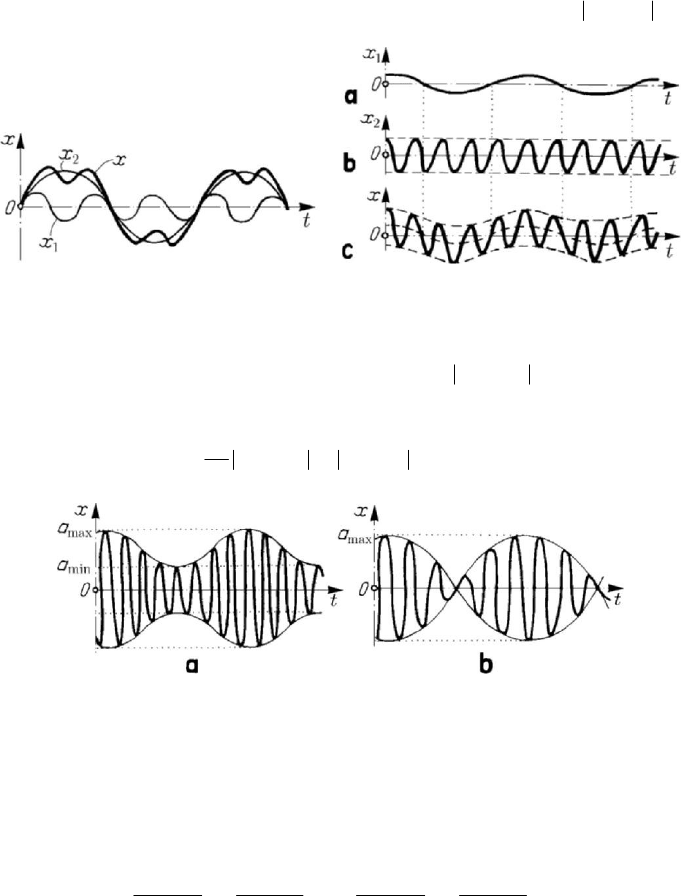
Figure 8.21-8.22. Composition of two harmonic vibrations for which
12
/ nωω= , n ∈ .
max
12
aaa=+, having maximal values (called beats in case of acoustic waves) at
intervals of time given by the period
12
2/
b
T πω ω
=
− (Fig.8.23,a); the
corresponding frequency is
12 12
1
2
b
νωωνν
π
=−=−
,
(8.2.29'')
Figure 8.23. Beats: general case (a); simple beats (b).
hence it is equal to the absolute value of the difference of the frequencies of the
component motions. One may thus syntonize two musical instruments (the period of the
beats tends to infinity if the frequencies of the two instruments tend to be equal). The
phenomenon is as much perceptible as the two amplitudes are closer. If
12
aaa==,
then the formulae (8.2.29), (8.2.29') lead to
(
)
(
)
12 12 12 12
2cos cos
22 22
xa t t
ωω ϕϕ ωω ϕϕ−− ++
=− −
,
(8.2.30)
hence to a product of two harmonic functions. In this case,
max
2aa= , while
min
0a = (one obtains the node of the beat), the diagram of the motion being given in
Fig.8.23,b; the beats are simple beats.
Dynamics of the particle in a field of elastic forces
501
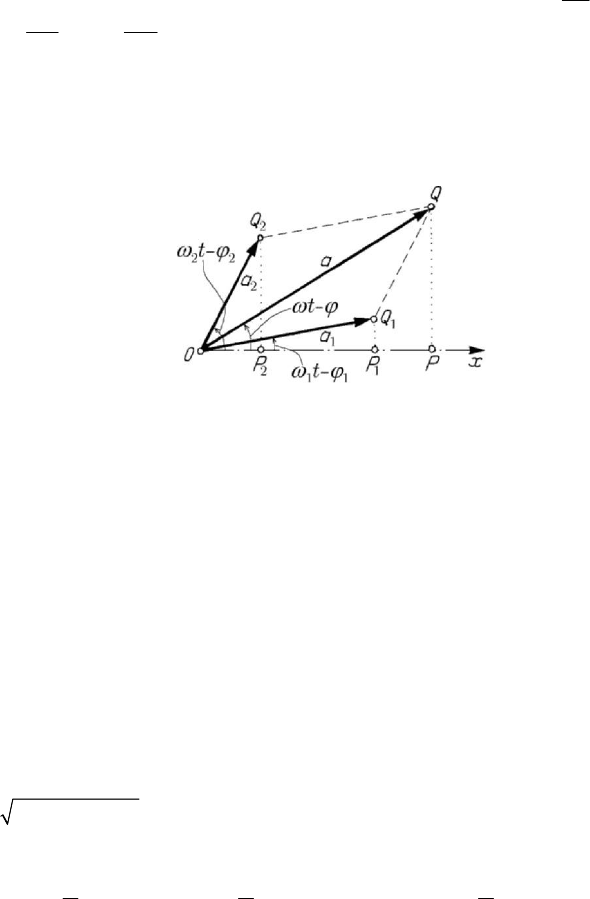
Using Fresnel’s method of representation, we can compose the vectors
1
OQ
and
2
OQ
, obtaining the vector OQ
, to which corresponds the motion
12
xOPx x
=
=+
,
11
xOP= ,
22
xOP= (Fig.8.24). Analogously, one may compose an arbitrary number
of harmonic vibrations
cos( )
ii i i
xa tωϕ
=
− , 1,2,...,in
=
. The resultant motion is
not – in general – harmonic, neither periodic; the motion is periodic if and only if the
ratio between any two pulsations is a rational number (
/
ij ij
nωω=
,
ij
n ∈ ,
, 1,2,...,ij n∀= ).
Figure 8.24. Fresnel’s representation method.
The inverse problem, which consists in the determination of the harmonic
components of a given periodic motion
()()xt T xt
+
= forms the object of harmonic
analysis; this problem is of particular importance in physics, in engineering technology
etc. Assuming that Lejeune-Dirichlet’s sufficient conditions (the function
()xt is
piecewise continuous, having a finite number of points of discontinuity of the first kind
and a finite number of maxima and minima on the time interval
T
) are fulfilled, we
may decompose the motion in the form
0
112 2
() cos( ) cos(2 ) ...xt a a t a tωϕ ωϕ=+ − + − +
... cos( ) ...
nn
antωϕ+−+
(8.2.31)
where
2/Tωπ
=
. We obtain thus a finite Fourier representation (an example of
decomposition of a periodic motion in a sum of two harmonic vibrations is given in
Fig.8.21) or a development into a Fourier series; the amplitudes
n
a
() ()
22
nn
aa
′′′
=+ and the phase shifts
(
)
arctan /
nnn
aaϕ
′
′′
=
are expressed by
means of the Fourier coefficients
0
1
()d
T
axtt
T
=
∫
,
2
()cos d
n
T
axtntt
T
ω
′
=
∫
,
2
()sin d
n
T
axtntt
T
ω
′′
=
∫
,
(8.2.31')
where the integration is effected along a period, beginning from an arbitrarily chosen
point; the coefficient
0
a represents the mean value of the displacement ()xt . The
oscillation
11
cos( )atωϕ− is of minimal frequency
min
/2νωπ
=
(of maximal period