Виноградов А.Б. Векторное управление электроприводами переменного тока
Подождите немного. Документ загружается.

271
с обмоткой возбуждения и демпферной обмоткой. На примере син-
хронного привода серии ЭПВ описана процедура синтеза регуляторов.
Рассмотрен принцип действия электропривода с бесконтактным двига-
телем постоянного тока, который является «близким родственником»
синхронной машины с постоянными магнитами.
14.1. Пример построения системы векторного управления
синхронным двигателем с постоянными магнитами
Рассмотрим построение системы векторного управления синхрон-
ным двигателем с постоянными магнитами (СДПМ).
Область применения таких систем: высококачественный электро-
привод подач металлорежущих станков. Основные характеристики
контура регулирования скорости: диапазон регулирования – не менее
10000, полоса пропускания – не менее 100 Гц.
Синтез системы управление выполним на основе динамической
модели СДПМ в системе координат (
d,q) , ориентированной по маг-
нитной оси ротора [39]:
()
()
()
()
[]
,
2
3
;;
1
;
1
;
1
qdqdqfP
PC
fddqsq
q
q
qqdsd
d
d
IILLIZM
ZMM
Jdt
d
ILIRU
Ldt
dI
ILIRU
Ldt
dI
−+Ψ=
Ω=Ω⋅−−=
Ω
Ψ−−−=
+−=
ωβ
ωω
ω
sqd
LLL ==
Для частного случая неявнополюсной конструкции ротора двига-
теля
.
где
I
d
, I
q
, U
d
, U
q
– токи и напряжения статора по осям d и q; М,
М
С
– электромагнитный и нагрузочный моменты;
ω
– частота враще-
ния ротора, электрическая;
J – момент инерции ротора;
β
– коэффици-
ент вязкого трения (коэффициент демпфирования);
Ψ
f
– потокосцеп-
ление, создаваемое постоянным магнитом;
– индуктивности
обмотки статора по продольной и поперечной осям ротора.
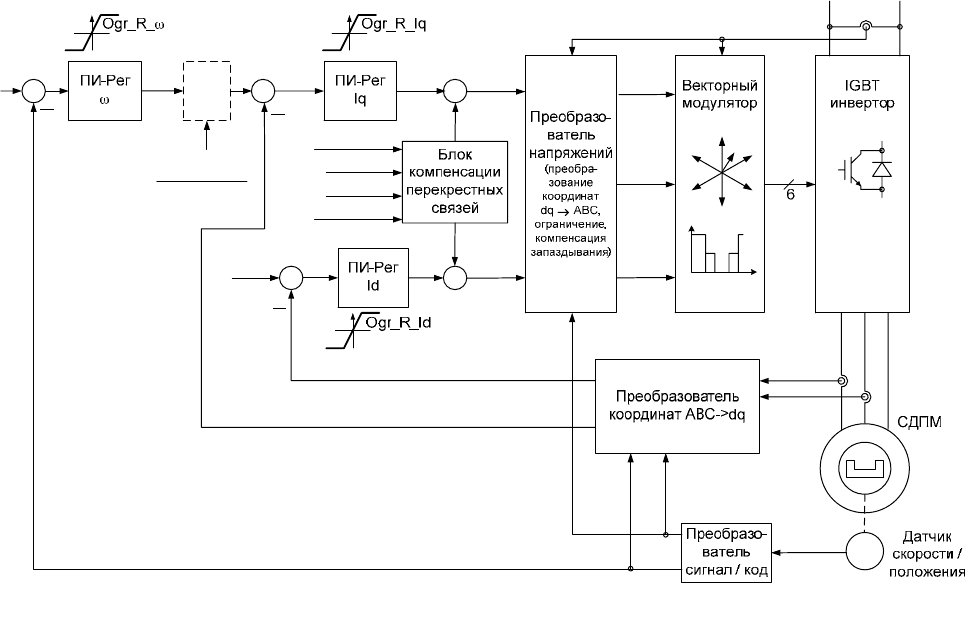
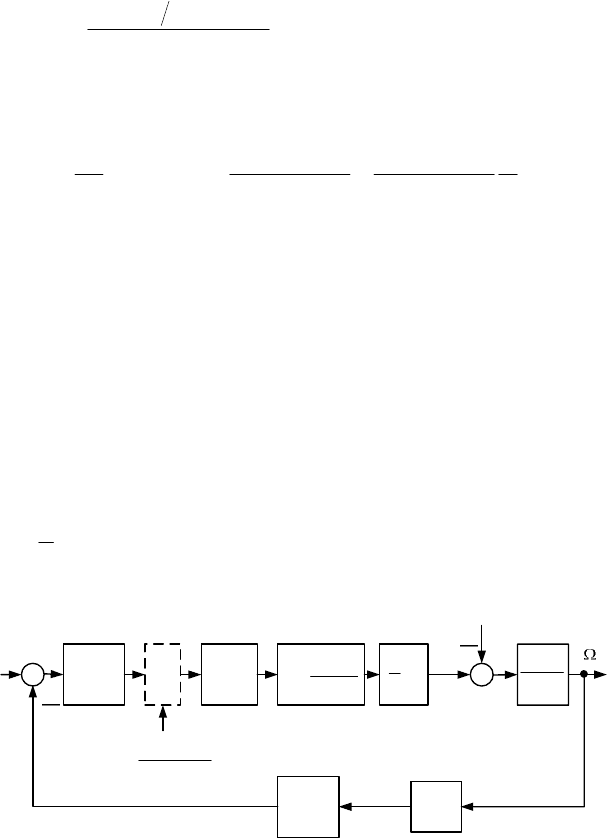
Функциональная схема системы векторного управления СДПМ
изображена на рис.14.1.
(14.1)
qd
LL ,
÷
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
Ψ
−
+
f
qd
IdLL )(
1
z
ω
qz
I
qz
U
k
q
U
d
I
ψ
ω
q
I
f
Ψ
kd
U
dz
U
dz
I
d
I
q
I
d
U
az
U
bz
U
cz
U
упр
U
b
I
a
I
r
ϕ
ω
Рис.14.1. Функциональная схема системы векторного управления СДПМ
272
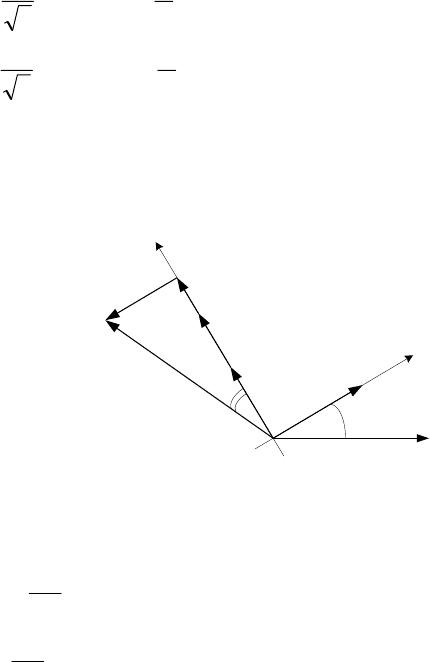
Нулевое задание тока по оси
d обеспечивает минимизацию тока
статора при заданной величине момента нагрузки. В этом случае ток
статора во всех режимах работы привода направлен перпендикулярно
магнитной оси ротора (по оси q) в соответствии с векторной диаграм-
мой двигателя на рис.14.2.
Преобразователь координат
выполняет преобразо-
вание фазных токов статора АД из естественной трехфазной системы
координат (
А,В,С) в ортогональную синхронную систему координат
(
d,q) по уравнениям
dqABC →
,)]cos()
3
cos([
3
2
;)]sin()
3
sin([
3
2
rBrAq
rBrAd
III
III
ϕ
π
ϕ
ϕ
π
ϕ
++=
++=
(14.2)
где
r
ϕ
– угловое положение ротора (электрическое), полученное с дат-
чика положения.
Алгоритмы работы преобразователя напряжений и векторного мо-
дулятора аналогичны рассмотренным в разд. 11.4 для векторной сис-
темы управления асинхронным двигателем.
0
d
q
γ
s
U
r
f
Ψ
r
qq
IL
ω
−
qs
IR
f
E Ψω=
r
r
qs
II =
r
r
ϕ
A
Рис.14.2. Векторная диаграмма СДПМ
Блок компенсации перекрестных связей работает по следующим
уравнениям:
;
1
qq
пч
kd
IL
k
U
ω
−=
)(
1
fdd
пч
kq
IL
k
U Ψ+=
ω
.
(14.3)
273
Синтез регуляторов осуществим на основе принципов подчинен-
ного регулирования с использованием метода компенсации нелиней-
ных связей.
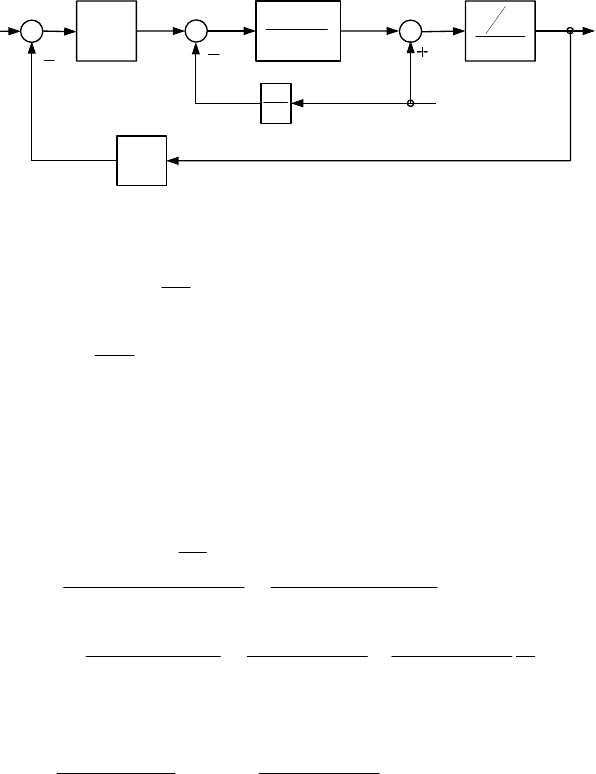
Выполним синтез регулятора тока по оси d.
Структурная схема контура тока по оси
d изображена на рис.14.3.
)( pH
РT
1+pТ
К
пч
пч
1
1
+pТ
R
d
S
пч
K
1
qq
IL
ω
dz
I
dz
U
kd
U
d
I
дт
K
Рис.14.3. Структурная схема контура тока по оси d
Обозначения:
s
d
d
R
L
T
= – постоянная времени статорной цепи по оси
d;
qq
пч
kd
IL
K
U
ω
1
−=
– сигнал компенсации влияния нелинейной
перекрестной связи.
Считая влияние перекрестной связи полностью скомпенсирован-
ным, выполним настройку контура на модульный оптимум с малой не-
компенсируемой постоянной времени
пчкт
TT
=
. В результате полу-
чим:
)1(2
1
)1)(1(
1
)(
+
=
++ pTpTpTpT
R
КК
sH
ктктdкт
s
дтпч
РТ
;
pTКК
R
TКК
L
pTКК
sTR
sH
ктдтпч
s
ктдтпч
d
ктдтпч
ds
РТ
1
222
)1(
)(
+=
+
= .
Таким образом, коэффициенты пропорциональной и интегральной со-
ставляющих ПИ регулятора тока по оси d определяются выражениями
ктдтпч
d
pid
TКК
L
K
2
=
;
ктдтпч
s
iid
TКК
R
K
2
= .
Передаточная функция замкнутого контура тока
274
122
1
)(
22
++
=
pTpT
k
pH
кткт
дт
кт
.
Синтез регулятора тока по оси q выполняется аналогично, с уче-
том следующих условий:
1)
;
s
q
q
R
L
T =
pTКК
R
TКК
L
sH
ктдтпч
s
ктдтпч
q
РТ
1
22
)( +=
;
2) Сигнал возмущающей перекрестной связи, подлежащей компенса-
ции, имеет вид
)(
fddkq
ILU
Ψ
+
=
ω
.
Выполним синтез регулятора скорости.
Структурная схема контура скорости для общего случая изобра-
жена на рис.14.4.
Второй (реактивной) составляющей момента (см. последнее урав-
нение системы (14.1)) можно пренебречь в следующих случаях:
1)
для неявнополюсных машин (L
d
= L
q
);
2)
при управлении по закону I
d
= 0 для любых типов СДПМ.
В этих случаях
qfP
IZM Ψ=
2
3
,
(14.4)
где
. const
f
=Ψ
÷
)( pH
кт
)( pH
РС
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
Ψ
−
+Ψ
f
dqd
f
ILL )(
1
P
Z
2
3
β+Jp
1
)( pH
ФС
z
ω
q
I
M
c
M
дc
K
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
Ψ
−
+
f
dqd
ILL )(
1
Рис.14.4. Структурная схема контура скорости
Для частного случая
0
=
β
настройка контура скорости выполня-
ется на симметричный оптимум. В результате получается ПИ-
регулятор скорости с передаточной функцией
275

,)(
p
k
kpH
i
pрс
ω
ω
+=
где
дсPfкс
дт
p
KZT
JК
k
⋅⋅Ψ⋅
=
3
ω
;
дсPfкс
дт
i
KZT
JК
k
⋅⋅Ψ⋅
=
2
12
ω
;
, – постоянная времени фильтра скорости.
фскткс
TTT += 2
фс
T
Для общего случая
0
≠
β
настройка контура скорости выполня-
ется на модульный оптимум.
14.2. Принцип действия электропривода с бесконтактным
двигателем постоянного тока
Работу самоуправляемого синхронного двигателя удобно рассмот-
реть на примере электропривода с бесконтактным двигателем посто-
янного тока, работающего при прямоугольной форме тока статора [34].
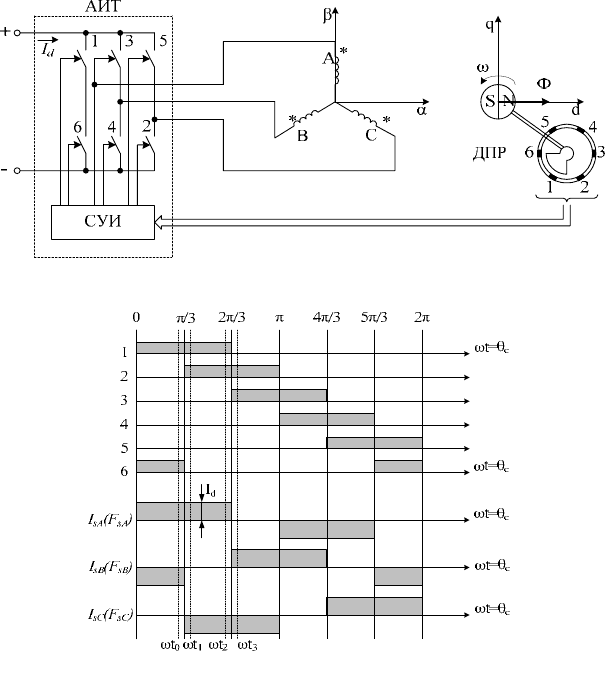
Структура привода может быть представлена в виде рис.14.5,а. Для
упрощения рассмотрения принято, что число пар полюсов обмотки
статора равно единице, это позволяет не различать физическое и элек-
трическое
пространства, а нагрузка на валу отсутствует. Обмотки фаз
статора А, В, С получают питание от автономного инвертора тока
(АИТ), в котором управление ключами, обозначенными цифрами 1 – 6,
осуществляется датчиком положения ротора (ДПР). В рассматривае-
мом случае ротор датчика выполнен в виде сегмента, расположенного
на валу двигателя и вращающегося вместе с ним.
На
неподвижной части датчика расположены шесть чувствитель-
ных элементов, пронумерованных цифрами 1–6, так же как и ключи
инвертора. Когда сегмент перекрывает собой данный чувствительный
элемент, элемент активизируется и через систему управления инверто-
ром (СУИ) воздействует на соответствующий ключ инвертора, замы-
кая его и удерживая в замкнутом состоянии все время, пока элемент
перекрыт
вращающимся сегментом. В любой момент времени замкнут
один ключ из группы 1 – 3 – 5 и один из группы 4 – 6 – 2 и ток
протекает через две фазы обмотки статора двигателя. Если допустить
определенную идеализацию и считать, что переключение активных
элементов ДПР происходит без перекрытия, т. е. в любой момент вре-
мени замкнуты только два ключа инвертора, то можно проиллюстри-
ровать замкнутые состояния ключей и фазные токи графиками, приве-
денными на рис.14.5,б.
sd
I
При
0
tt
ω
ω
= ротор занимает положение, показанное на
рис.14.5,а. Этому соответствует замкнутое положение ключей инвер-
276
тора 1 и 6, а вектор потока ротора
и ориентированная по нему про-
дольная ось
вращающейся системы координат , связанной с
ротором, направлены горизонтально. Если обозначить угол поворота
ротора относительно неподвижной системы координат
Ф
d
),( qd
),(
β
α
через
c
θ
, то этому положению соответствует значение 0
=
c
θ
.
а)
б)
Рис.14.5. Бесконтактный двигатель постоянного тока: а – структу-
ра двигателя; б – алгоритм включения ключей инвертора и форма
фазных токов
На рис.14.6 для трех моментов времени показано взаимное распо-
ложение пространственных векторов намагничивающих сил
sA
F
r
,
sB
F
r
,
277
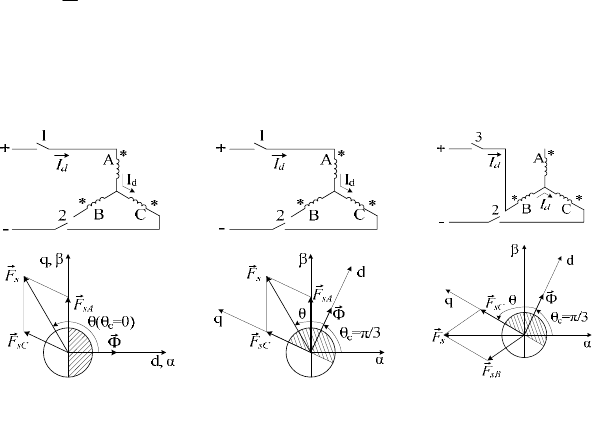
sC
F
r
фазных обмоток статора. В каждый момент времени ток про-
текает через две из них. Там же показано положение вектора результи-
рующей намагничивающей силы
sd
I
s
F
r
и магнитного потока ротора Ф
r
.
Вектор результирующей намагничивающей силы определен как гео-
метрическая сумма намагничивающих сил двух фаз, обтекаемых то-
ком, с учетом направления тока относительно начала и конца обмотки.
Начала обмоток отмечены значком *.
При вращении двигателя против хода часовой стрелки в момент
времени
, непосредственно следующий за моментом времени (см.
рис.14.5,а), замкнулся ключ инвертора 2 вместо разомкнувшегося
ключа 6. Ток протекает от начала к концу фазы А и от конца к началу
фазы С, что определяет положение векторов
1
t
0
t
sA
F
r
и
sB
F
r
и результи-
рующего вектора
s
F
r
(см. рис.14.6,а). Ротор, а следовательно, и свя-
занный с ним вектор потока
Ф еще находятся в положении, показан-
ном на рис.14.5,а. Двигатель развивает электромагнитный момент
θ
sin||||
2
3
ФFZM
spД
r
r
=
,
где
, ||
s
F
r
|| Ф
r
– модули намагничивающей силы и магнитного пото-
ка ротора соответственно;
θ
– угол между векторами, равный в дан-
ный момент времени
3/2
π
рад.
а) б) в)
Рис.14.6. Положение пространственного вектора намагничивающей силы
в бесконтактном двигателе постоянного тока:
а – при
; б – при
1
tt =
2
tt
=
; в – при
3
tt =
Под действием электромагнитного момента ротор двигателя пово-
рачивается против часовой стрелки и угол
θ
уменьшается. Когда он
278
уменьшится до значения
2/
π
, момент двигателя достигнет максиму-
ма, а при дальнейшем уменьшении угла момент начнет уменьшаться.
Когда при
2
tt
ω
ω
=
угол
θ
станет равным 3/
π
θ
=
c
рад (см.
рис.14.6, б), момент двигателя уменьшится до значения, существовав-
шего при
1
tt
ω
ω
= . Если бы состояние ключей инвертора и далее ос-
тавалось неизменным, то ротор продолжал бы поворачиваться, стре-
мясь к положению, при котором пространственные векторы
s
F
r
и Ф
r
совпадают. Однако при
3/
π
θ
=
рад разомкнётся ключ 1 и замкнется
ключ 3, что соответствует
3
tt
ω
ω
=
(см. рис.14.5). В результате век-
тор
скачком повернется на
s
F
r
3/
π
рад (см. рис.14.6, в). Взаимное
расположение векторов оказывается при этом таким же, как и на
рис.14.6,а, но положение ротора отличается от исходного положения
на
3/
π
рад. Описанный процесс повторяется непрерывно, и двига-
тель вращается.
Момент двигателя и скорость имеют пульсирующий характер.
Уровень пульсаций скорости при данном уровне пульсаций момента
двигателя зависит от момента инерции привода и проявляется тем
больше, чем момент инерции меньше.
Так же как в приводе с асинхронным двигателем, работающим с
автономным инвертором
тока, в приводе с описанным двигателем не-
обходимо наличие замкнутого контура регулирования скорости. Тогда
изменение, например увеличение сигнала задания скорости, приводит
к увеличению значения тока
и намагничивающей силы . Мо-
мент двигателя увеличивается, что, в свою очередь, вызывает увеличе-
ние скорости. Если момент нагрузки при этом остается неизменным,
то по окончании переходного процесса ток
, а следовательно, и мо-
мент двигателя вернутся к прежнему значению.
d
I
s
F
d
I
Наличие существенных пульсаций момента и связанная с этим не-
равномерность вращения двигателя являются одним из основных не-
достатков рассмотренного принципа построения привода. Этот недос-
таток устраняется переходом к синусоидальной форме тока в обмотках
статора. Частота этого тока, так же как
и в рассмотренной схеме,
должна определяться датчиком положения ротора.
14.3. Принцип построения и математическое описание
электропривода с вентильным двигателем на основе
двухфазной синхронной машины
279
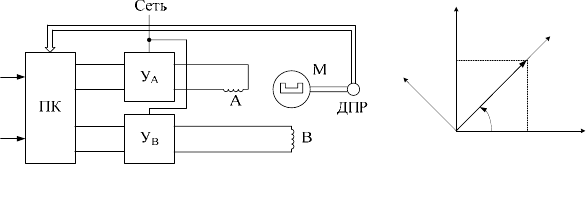
Примером электропривода с вентильным двигателем на основе
двухфазной синхронной машины с постоянными магнитами на роторе
является привод с двигателем ДБМ. Структура электропривода с дви-
гателем ДБМ представлена на рис.14.7,а [26]. На обмотки статора А и
В, сдвинутые в пространстве друг относительно друга на угол
, т.е. на 90 эл. град., подаются синусоидальные напряжения
переменного тока
и . Для образования кругового вращающе-
гося магнитного поля эти напряжения должны быть сдвинуты друг от
друга на
p
Z/90°
sA
U
sB
U
°
=
90
эл0
t
ω
во времени. Усилители мощности и
усиливают входные синусоидальные сигналы
и , посту-
пающие с преобразователя координат (ПК). Преобразователь коорди-
нат преобразует сигналы постоянного тока
и в сигналы пе-
ременного тока. Вектор потока постоянных магнитов
А
У
В
У
sAz
U
sBz
U
dz
U
qz
U
Ф
r
и вектор по-
токосцепления статора от этого потока
f
Ψ
r
, жестко связанные с рото-
ром, направлены по продольной оси
. Вектор d
f
Ψ
r
показан на
рис.14.7,б. Угол
c
θ
, представляющий собой текущее значение угла
поворота вращающейся системы координат относительно не-
подвижной системы координат
),( qd
),(
β
α
, является и углом поворота ро-
тора в электрическом пространстве. Он измеряется датчиком положе-
ния ротора (ДПР), которым в приводе с двигателем ДБМ служит си-
нусно-косинусный вращающийся трансформатор. В дальнейшем бу-
дем считать, что датчик положения ротора установлен так, что изме-
ряемый им угол
c
θ
равен нулю при совпадении оси вращающейся
системы координат с осью
d
α
неподвижной системы координат.
sqz
U
sdz
U
c
θ
sAz
U
sB
U
sA
U
sBz
U
c
θ
α
β
d
q
f
Ψ
r
β
f
Ψ
α
f
Ψ
а) б)
Рис.14.7. Вентильный двигатель на основе машины типа ДБМ:
а – структура; б – вектор потокосцепления в двух системах координат
280