Ammari H., Benkirane A., Touzani A. (editors) Recent Developments in Nonlinear Analysis
Подождите немного. Документ загружается.

December 28, 2009 12:15 WSPC - Proceedings Trim Size: 9in x 6in recent
360
However, in a small ε−vicinity of the origin, the so called boundary
layer ( |s| ≤ ε), is a smooth continuous function ( tanh (
s
ε
) 6= sgn(s) ). The
system trajectories are confined to a boundary layer of the sliding manifold
s = 0 [10].
4. Simulation results
In order to test the proposed controller algorithm, we consider the regula-
tion problem of a nonlinear servomechanism,
4
which is described in space
state as:
˙x
1
= x
2
˙x
2
= f(x
, t) + u(t) + d(t)
y = x
1
or equivalently
x
(2)
= f (x
, t) + b u(t) + d(t)
y = x
where f (x, t) = −x
2
− 0.4 sin (x
1
) , y
r
=
π
3
cos(0.025t) and d(t) =
0.01 rand (t
0
, t
f
) with t
0
= 0 and t
f
= 100s .
The control objective is to maintain the system to track the desired angle
trajectory y
r
.
The sliding surface is defined as: σ(x
, t) = k
1
e
0
(t) + k
2
˙e
0
(t) with k
1
= 5
and k
2
= 1.
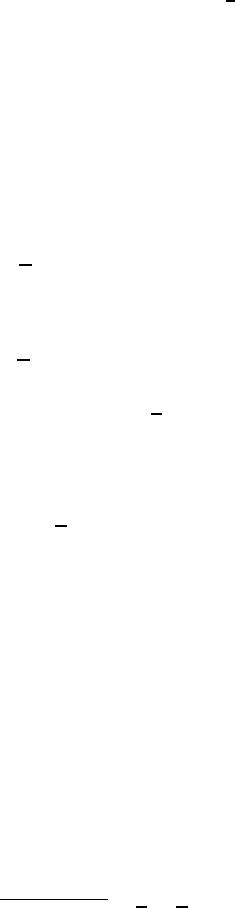
In the first step, we need to define some fuzzy sets to cover the state space.
The choice of the number of fuzzy set and the constant M is related to
knowledge of expert on the system. For simplicity, we consider M = 6 and
the fuzzy membership functions figure (1) are chosen as: Then there are 9
rules to approximate the primary control law . The fuzzy rules are defined
by the following linguistics description:
R
l
: If x
1
is F
l
1
and x
2
is F
l
2
then
ˆ
f
l
is θ
l
.
By using the singleton fuzzification, product inference and COG method
defuzzification, the primary control is given by :
ˆ
f(x, θ) =
9
P
l=1
θ
l
2
Q
i=1
µ
F
l
i
9
P
l=1
2
Q
i=1
µ
F
l
i
= θ
T
ξ(x
)
The auxiliary gain control is chosen as: k
5
= 4.
December 28, 2009 12:15 WSPC - Proceedings Trim Size: 9in x 6in recent
361
0 10 20 30 40 50 60 70 80
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x1 and x2
The membership function
Fig. 1. Membership functions of x
1
and x
2
.
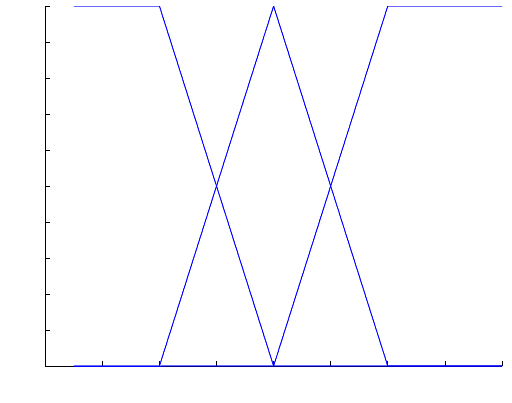
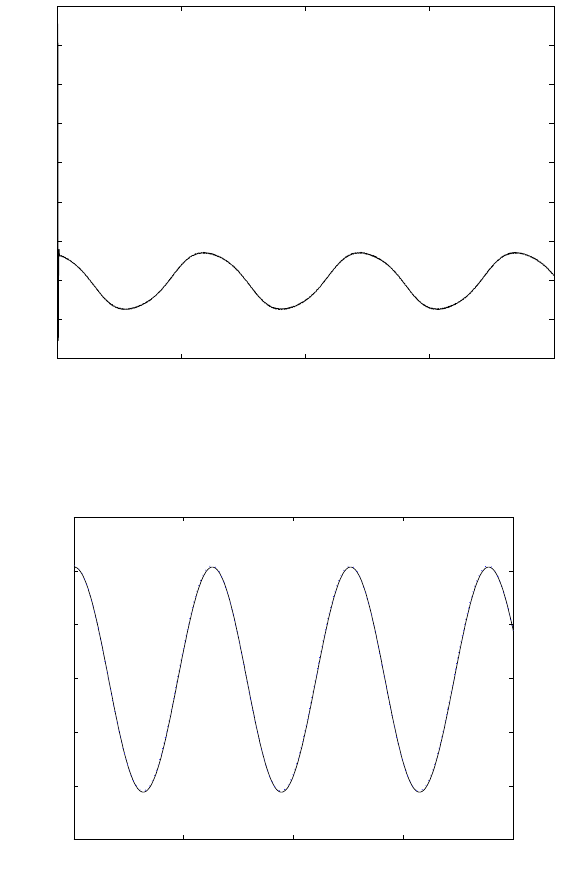
It can be seen on figure 3 that a good tracking is obtained in presence
of nonlinearity and disturbances. The corresponding fuzzy control signal is
given on figure 2.
5. Conclusion
In this paper, fuzzy SMC algorithm has been proposed for a class of un-
known nonlinear systems. We introduced the fuzzy system to approximate
the dynamics systems. Moreover, the fuzzy parameters can be tuned on-
line by the adaptive law based on Lyapunov synthesis. The added control
term is incorporated in the control for ensuring stability, tracking in the
presence of extern disturbances and removes the fuzzy approximation er-
ror. The simulation results shown that the proposed control methodology
is effective.
References
1. J. S. Wang and C.S.G. Lee. ”Sel-Adaptive Neuro-Fuzzy Inference Systems For
Classification Application”. IEEE Transactions on Fuzzy Systems, volum.10,
no.6: pp.790-802, 2002.
2. C. Edwards and S.K. Spurgeon. ”Sliding Mode Control-Theory and Appli-
cation”. London, U.K. Taylor Francis, 1998.
December 28, 2009 12:15 WSPC - Proceedings Trim Size: 9in x 6in recent
362
0 50 100 150 200
Ŧ1
Ŧ0.5
0
0.5
1
1.5
2
2.5
3
3.5
time (s)
control signal
Fig. 2. The control signal.
0 50 100 150 200
−1.5
−1
−0.5
0
0.5
1
1.5
time (s)
system output and desired
Fig. 3. Responses of y(t) and y
γ
(t).
3. I. Lagrat, H. Ouakka and I. Boumhidi. ”Fuzzy Sliding Mode PI Controller
for Nonlinear Systems”. WSEAS Transactions on Signal Processing, volum.2:
December 28, 2009 12:15 WSPC - Proceedings Trim Size: 9in x 6in recent
363
pp.1137-1143, Sept 2006.
4. Z. Kovacic, M. Balenovic and S. Bogdan. ”Sensitivity-based self learning
fuzzy logic control for a servosystem”. IEEE Control Systems. June 1998.
5. H. Lee and M. Tomizuka. ”Robust Adaptive Control using a Universal ap-
proximator for SISO Nonlinear Systems”. IEEE Transaction on Fuzzy Sys-
tems, volum.8: pp.95-106, 2001.
6. N. Golea, A. Golea and K. Benmahammed. ”Stable indirect fuzzy adaptive
control”. Elsevier, Fuzzy Sets and Systems, volum.137, no 3: pp.353-366,
2003.
7. M. Hojati and S. Gazor. ”Hybrid Adaptive Fuzzy Identification and Control
of Nonlinear Systems”. IEEE Transactions on Fuzzy Systems, volum.10, no.2:
pp.198-210, 2002.
8. F. Qiao, Q.M. Zhu, A. Winfield and C. Melhuism. ”Fuzzy Sliding Mode
Control for discrete Nonlinear Systems”. Transactions of china automation
society, volum.22, no.2, June 2002.
9. L. X. Wang. ”Adaptive fuzzy systems and control: designing and stability
analysis”. Prentice Hall, 1994.
10. J.J. Slotine, ”Sliding Controller Design for Non Linear Systems.” Interna-
tional Journal of Control, vol.40, no.2, pp. 421-434, 1984.
11. J. Boumhidi and M.Mrabti, ”Sliding mode controller for robust force control
of hydraulic servo-actuator”, In ISEE, IEEE International Symposium on
Electrical Engineering, Targoviste, Romania, pp. 27-33, November 1-2, 2004.
This page intentionally left blankThis page intentionally left blank
December 28, 2009 12:15 WSPC - Proceedings Trim Size: 9in x 6in recent
365
AUTHOR INDEX
A¨ıssaoui, N., 234
Achkar, Y., 290
Addou, A., 101
Aharouch, L., 170, 181
Akdim, Y., 327, 344
Alaoui Hafidi, Y., 355
Azroul, E., 123, 181
Bahri, A., 1
Bendahmane, M., 205
Benkirane, A., 17, 30, 170
Bennouna, J., 170, 327
Benouna, J., 30
Boucherif, A., 54
Boumhidi, I., 355
Boumhidi, J., 355
Chrif, M., 17, 205
El Habib, S., 278
El Hachimi, A., 72
El Khalil, A., 43
El Manouni, S., 17, 205
Hage Chehade, F., 141
Igbida, N., 266
Lamrani Alaoui, A., 72
Lidouh, A., 101
Marrakchi, A. L., 290
Mekkour, M., 327
Redwane, H., 150
Rhoudaf, M., 30, 123, 181, 327
Sadek, M., 141
Sayouri, S., 290
Seddoug, B., 101
Talbi, M., 217
Touzani, A., 170
Tsouli, N., 217, 278
Youssfi, A., 88