Barber J.R. Intermediate Mechanics of Materials
Подождите немного. Документ загружается.

6.2 Shear centre 305
Example 6. 3
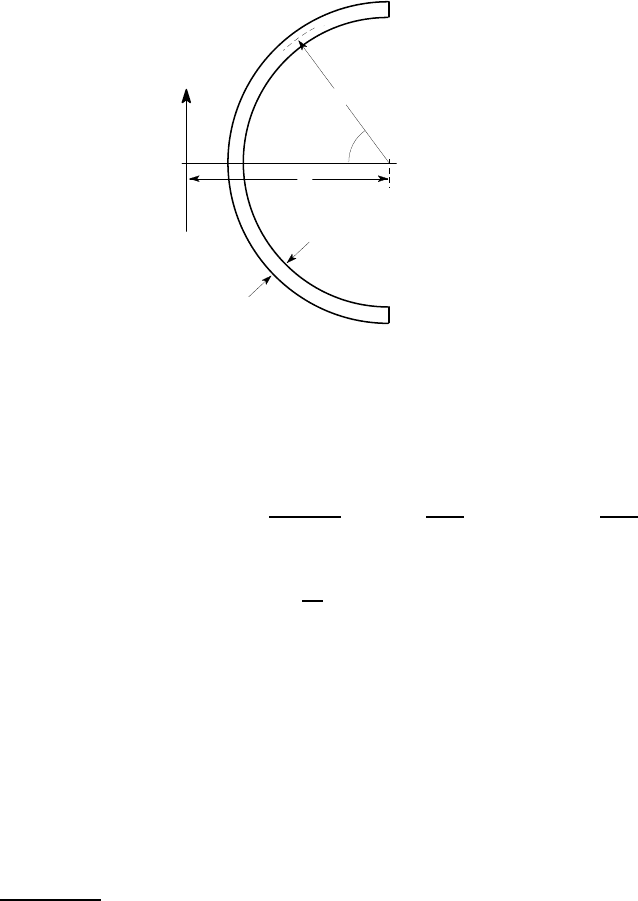
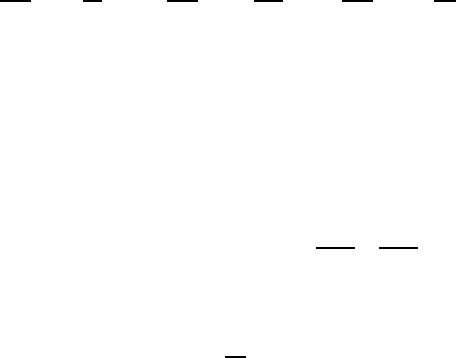
Find the distance c defining the shear centre for the semi-circular section of Figure
6.23.
a
O
t
φ
c
V
y
C
Figure 6.23: Location of the shear centre for the semi-circular cross section
The shear stress distribution for this section has already been determined in §6.1.4
above and is given by equation (6.15). In applying equation (6.18) to find c, it is
convenient to take moments about the centre of the semi-circle, since the moment
arm will then be constant and equal to the radius a. We therefore have
V
y
c =
ZZ
A
(a)
τ
dA =
Z
π
/2
−
π
/2
(a)
2V
y
cos
φ
π
at
atd
φ
=
2V
y
a
π
Z
π
/2
−
π
/2
cos
φ
d
φ
=
4V
y
a
π
,
using (6.15) and hence
c =
4a
π
≈ 1.27a .
It follows that the shear centre C is actually to the left of the section, as shown
in Figure 6.23 — i.e. it is outside the semi-circle. This is surprising at first sight,
but it is reasonable when we realize that the moment of the distribution about C has
to be zero, whereas for any point on the concave side of the section the integrand
would be everywhere positive (positive
τ
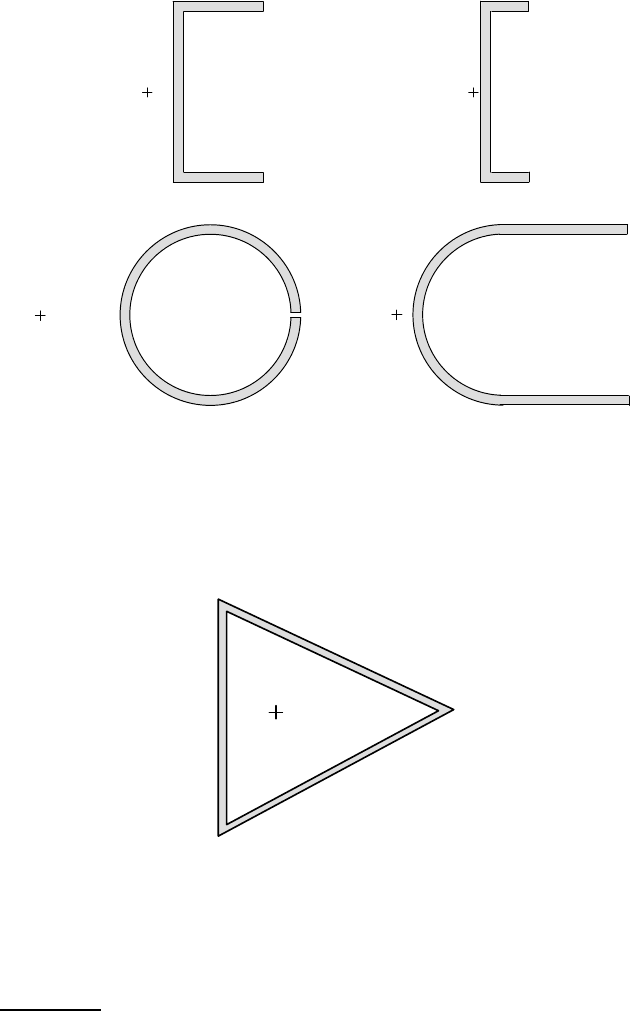
and positive moment arm). In general, for
open sections such as semi-circles, channels, open box sections etc., the shear centre
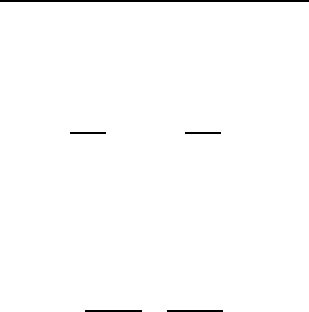
is outside the section, but usually not very far outside. Some typical examples are
shown in Figure 6.24.
Notice that the sections have to be open for this to be true. A different procedure
is needed if they are closed
7
and generally the shear centre is then inside the section,
as shown for example in Figure 6.25. This will be discussed in §6.6 below.
7
A closed thin-walled section is one that completely encloses a volume. A closed section is
rendered open by a cut at any point, even if the width of the cut is infinitesimal. Another
way of defining this distinction is to note that a closed section is a multiply-connected
shape, whereas an open section is simply-connected.
306 6 Shear and Torsion of Thin-walled Beams
C
C
C
C
Figure 6.24: Typical shear centre locations for open sections
Thus, a major difference in shear behaviour is produced by slitting open a closed
thin-walled section. You can examine this effect by comparing a loosely rolled cylin-
drical tube of paper with the same tube after it is taped shut along the edge.
8
The
distinction arises because the open tube permits relative motion along the axis at the
edge, whereas the closed tube does not.
C
Figure 6.25: Shear centre for a closed section
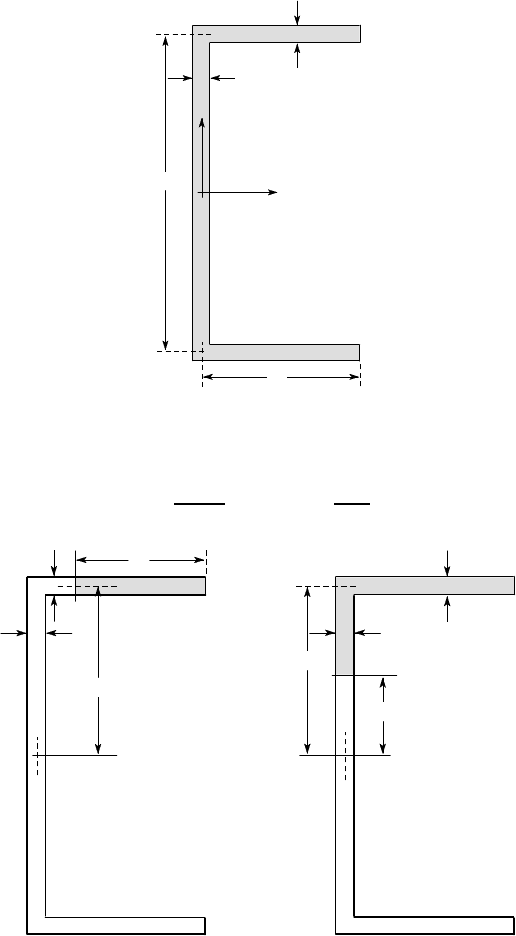
Example 6. 4
Find the location of the shear centre for the thin-walled channel section of Figure
6.26.
8
For a more robust experiment, compare the cardboard tube from the centre of a roll of
kitchen paper with a similar tube that has been slit along the axis, as in the third cross
section of Figure 6.24.
6.2 Shear centre 307
t
a
2a
t
O
x
y
Figure 6.26
It is first necessary to determine the second moment of area which is
I
x
=
(2a)
3
t
12
+ 2(at)a
2
=
8a
3
t
3
.
t
t
O
x
a
cut
t
a
t
O
y
cut
(a) (b)
Figure 6.27: Cuts for determining the shear stress (a) in the flange and (b) in the web
If the beam is loaded by a vertical shear force V
y
, the horizontal shear flow in the
upper flange can be found using the cut of Figure 6.27 (a) and is
308 6 Shear and Torsion of Thin-walled Beams
q =
V
y
(tx)a
I
x
=
3V
y
x
8a
2
,
where x is measured from the free end as shown in the figure. An equal and opposite
stress is obtained in the lower flange by symmetry.
9
For the web, we use the cut of Figure 6.27 (b), obtaining
A
∗
¯y
∗
= (at)a +
(a −y)(a + y)t
2
=
3a
2
t
2
−
y
2
t
2
and hence
q =
3V
y
16a
3 −
y
2
a
2
,
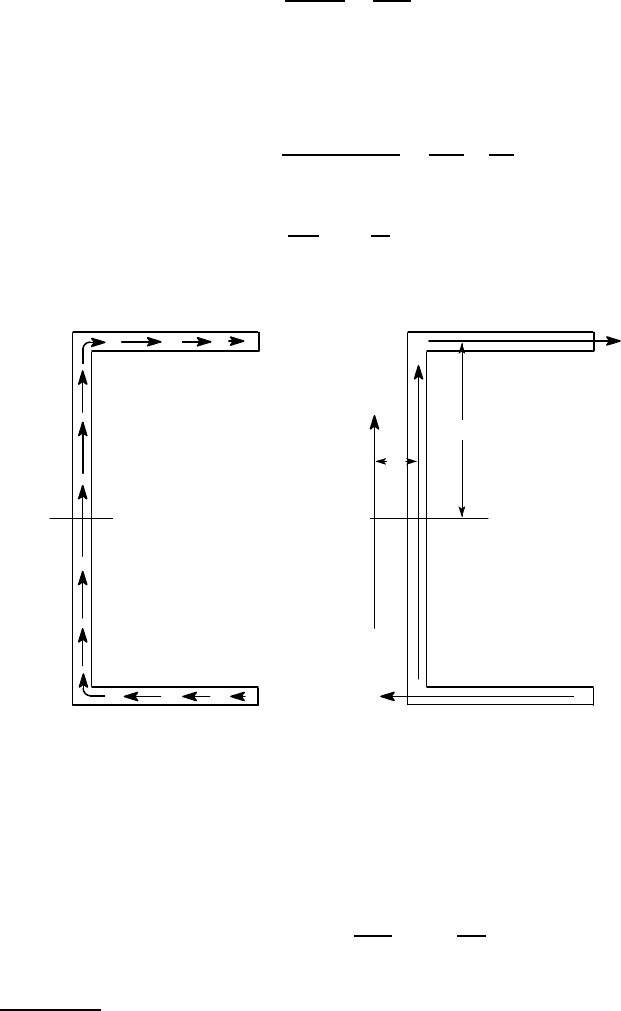
where y is measured from the neutral axis. The stress distribution is illustrated in
Figure 6.28 (a).
O
a
O
F
1
F
3
F
2
V
y
c
(a) (b)
Figure 6.28: (a) shear stress distribution in the channel section, (b) force resultants
The channel section is made up of straight segments and all the elemental forces
in any given segment will have the same line of action. We can therefore sum the
forces separately for each segment by integration. For example, the resultant of the
shear flow q in the top flange is
F
1
=
Z
a
0
qdx =
Z
a
0
3V
y
x
8a
2
dx =
3V
y
16
and it has the line of action shown in Figure 6.28 (b).
9
Alternatively, we could make a similar cut in the lower flange obtaining exactly the same
expression, except that ¯y
∗
would be −a, leading to a change of sign.
6.2 Shear centre 309
The resultant of the shear stress in the web, F
2
in Figure 6.28 (b), must be equal
to V
y
, since this is the only place where the shear stress has a vertical component. We
can confirm this by evaluating F
2
as
F
2
=
Z
a
−a
3V
y
16a
3 −
y
2
a
2
dy =
3V
y
16a
3y −
y
3
3a
2
a
−a
=
3V
y
16a
6a −
2a
3
= V
y
.
The force F
3
in the lower flange is equal and opposite to F
1
by symmetry, so
horizontal equilibrium is satisfied.
We can now determine the location of the shear centre by taking moments about
the point O in Figure 6.28 (b). The force V
y
is statically equivalent to the system of
forces F
1
,F
2
,F
3
and hence must have the same moment as this system about any
point. It follows that
V
y
×c = F
1
×a + F
2
×0 + F
3
×a =
3V
y
a
16
+
3V
y
a
16
and hence
c =
3a
8
.
Notice that by taking moments about O, we were able to make the moment arm
for F
2
equal to zero. If we had recognized this from the beginning, we could have
avoided calculating the shear stress in the web, thereby shortening the calculation.
In general, when the problem asks only for the location of the shear centre, a careful
choice of the point about which to take moments can often result in a saving of
algebraic work.
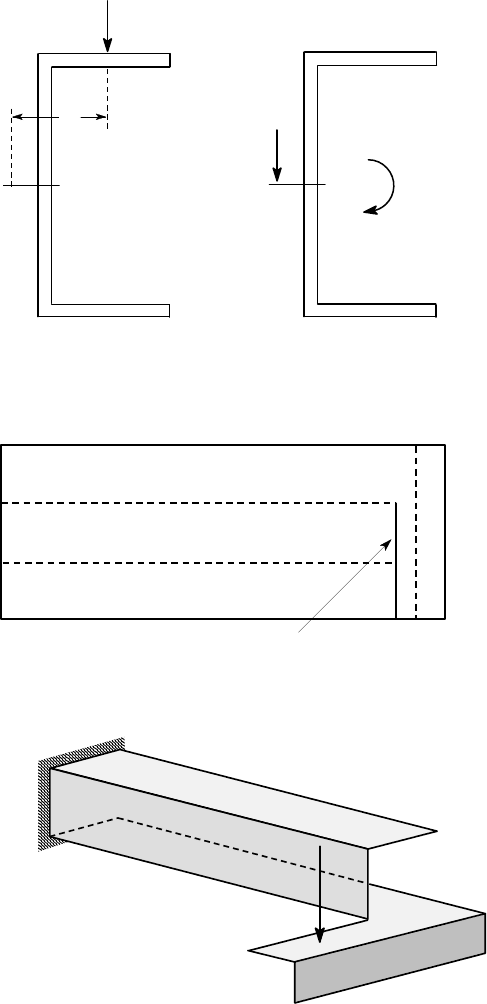
Experiment
It is difficult to load a channel section at the shear centre, since the latter occurs
outside the section. It is easier to load it on the flange. This is equivalent to superpos-
ing a moment in the clockwise sense, as shown in Figure 6.29, and it will twist the
section. You can test this experimentally by making a channel section beam from a
piece of thin metal plate, fixing it at one end and loading the other end by a transverse
force, as in Figure 6.29 (a). You will find that the free end rotates clockwise under
the action of the equivalent moment of Figure 6.29 (b).
As a variant on this experiment, cut out a rectangular plate as in Figure 6.30 (a)
and fold it along the dotted lines to form the beam of Figure 6.30 (b). You will then
be able to investigate the effect of loading outside the envelope of the section and in
particular to locate the shear centre by finding the line of action of the force F for
which there is no twist.
310 6 Shear and Torsion of Thin-walled Beams
O
F
C
d
O
F
C
T = Fd
(a) (b)
Figure 6.29: (a) shear loading of the channel section, (b) equivalent loading system
with the force acting through the shear centre and a torque
cut
Figure 6.30(a): An experimental model for finding the shear centre of a channel
section
F
Figure 6.30(b): Fold the plate to form the channel-shaped cantilever shown and ex-
plore the effect of the line of action of F on the twist of the section.
6.3 Unsymmetrical sections 311
6.3 Unsymmetrical sections
So far, we have considered only sections with at least one axis of symmetry. The
generalization to unsymmetrical sections is routine, but leads to significantly more
complicated algebra. The principal reason for performing these calculations is to de-
termine the location of the shear centre, since the moment resulting from shear load-
ing of an open section away from its shear centre [see e.g. Figure 6.29 (b)] can cause
significant torsional stresses and twist, as will be discussed in §6.7 below. By con-
trast, the shear stresses associated with shear loading acting through the shear centre
are often sufficiently small to be neglected, or estimated by simple approximations
as discussed in §6.1.2.
6.3.1 Shear stress for an unsymmetrical section
The derivation of §6.1 can be generalized to unsymmetrical sections, using equation
(4.20) in place of (6.2) to define the bending stress. We obtain
q =
τ
t =
(V
x
I
x
−V
y
I
xy
)A
∗
¯x
∗
−(V
x
I
xy
−V
y
I
y
)A
∗
¯y
∗
(I
x
I
y
−I
2
xy
)
, (6.19)
where (¯x
∗
, ¯y
∗
) are the coordinates of the centroid of A
∗
relative to the centroid of the
whole section and we have used the relations
V
x
= −
dM
y
dz
; V
y
=
dM
x
dz
, (6.20)
obtained by similar arguments to equation (6.1), using the sign convention of Figures
4.1, 6.1.
If the coordinate system Oxy is chosen to coincide with the principal axis system
as in §4.4.3, the product inertia I
xy
will be zero and equation (6.19) reduces to
q =
τ
t =
V
x
A
∗
¯x
∗
I
y
+
V
y
A
∗
¯y
∗
I
x
, (6.21)
which is of course equivalent to the superposition of two applications of equation
(6.9) about orthogonal axes.
6.3.2 Determining the shear centre
Suppose that the shear centre of the unsymmetrical thin-walled section of Figure
6.31 is at the point C(a, b). As before, the shear flow q defined by equation (6.19)
corresponds to an elemental force dF =
τ
tdS = qdS. The moment of the complete
stress distribution about O can then be equated to the moment of the two shear force
components V
x
,V
y
, giving
aV
y
−bV
x
=
Z
S
nqdS . (6.22)
312 6 Shear and Torsion of Thin-walled Beams
For a particular problem, q will be known from (6.19) and can be substituted
into (6.22). When the integral is evaluated, the coordinates a,b of the shear centre
can be determined by equating coefficients of V
x
,V
y
. Alternatively, we can solve two
separate problems — one with V
x
= 0 to determine a and another with V
y
= 0 to
determine b.
O
V
y
C
dF
n
a
b
V
x
Figure 6.31: Determining the shear centre for an unsymmetric section
The procedure is algebraically tedious and will not be pursued here. More details
and worked examples can be found in Cook and Young §9.8 or Bickford §4.4.
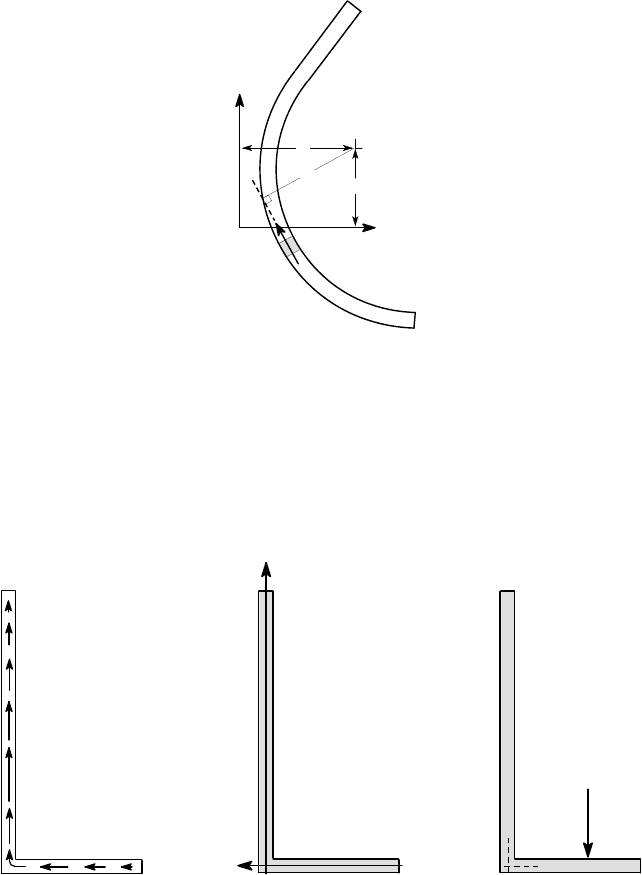
Shear centre for angle sections
One example for which the determination of the shear centre is very straightforward
is the thin-walled angle section of Figure 6.32.
C
F
1
F
2
C
F
(a) (b) (c)
Figure 6.32: (a) Shear stress distribution, (b) equivalent forces and shear centre
location for an angle section, (c) loading by a force on the flange
6.4 Closed sections 313
The shear stress distribution has to follow the walls of the section as in Figure
6.32 (a) and hence is equivalent to the two forces F
1
,F
2
shown in Figure 6.32 (b).
The resultant of these two forces must act through the corner of the section C which
is therefore the shear centre.
Loading of an angle by a shear force on the lower flange, as shown in Figure
6.32 (c), will therefore lead to clockwise twist of the section. Notice incidentally that
vertical loading as in Figure 6.32 (c) implies that F
1
= 0 and hence that the shear
stress in Figure 6.32 (a) changes direction at some point in the horizontal leg.
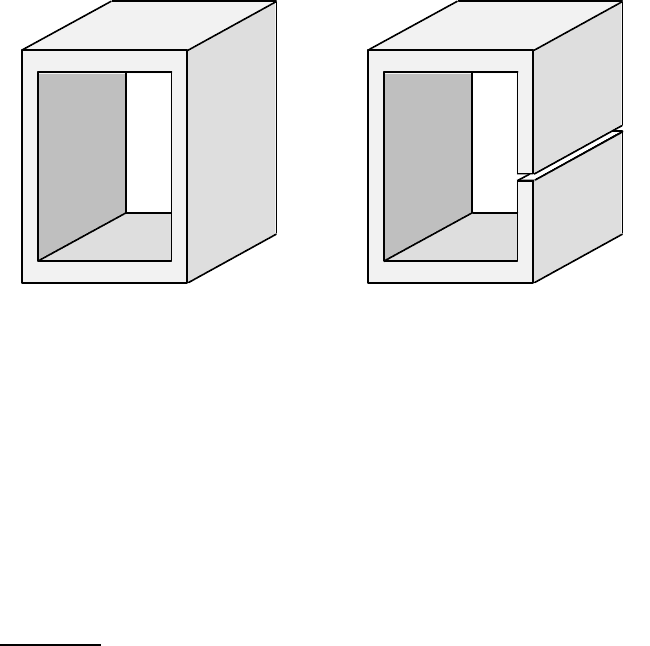
6.4 Clo sed sections
A closed section is one with one or more enclosed cavities. Another way of de-
scribing it is to say that a single longitudinal cut through the wall will not generally
separate the section into two parts, but will simply render the section open, as in the
case of the slit tube of Figure 6.33 (b).
(a) (b)
Figure 6.33: (a) Closed section and (b) equivalent open section obtained by slitting
the closed section along the axis
In this section, we shall restrict attention to the case of a single enclosed cav-
ity — e.g. a cylindrical tube or a box section. Other sections with several cavities
(i.e. a closed section with continuous internal stiffeners) can be treated by similar
methods.
10
6.4.1 Determination of the shear stress distribution
Suppose we have an arbitrary closed thin-walled section transmitting a shear force
V
y
. We follow the same procedure as in §6.1, but in order to remove a piece of the
10
See §6.6.2 below.
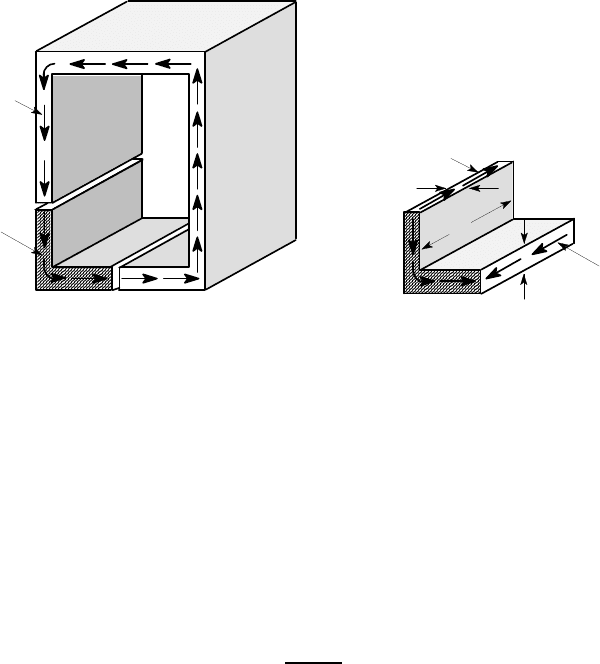
314 6 Shear and Torsion of Thin-walled Beams
section to write an equilibrium equation, we now have to make two cuts — e.g. one
at A and one at B in Figure 6.34 (a). We shall adopt the convention that
τ
is positive
in the anticlockwise sense, as shown, remembering that because of the thinness of
the wall, the stress is constrained to be parallel to the wall at every point.
A
B
A
*
τ
q ,
A
B
t
B
t
A
q ,
A
τ
A
B
q ,
τ
B
δz
(a) (b)
Figure 6.34: (a) Cuts needed to determine the shear stress for a closed section, (b)
section removed by the cut
The section removed by the cut is shown in Figure 6.34 (b). Notice that with the
anticlockwise positive convention for
τ
, the shear stresses complementary to
τ
A
,
τ
B
act in opposite directions along the axis on the cut surfaces. The resultant longitudinal
shear force on the two cuts is therefore
Q =
τ
B
t
B
δ
z −
τ
A
t
A
δ
z = (q
B
−q
A
)
δ
z
and substitution into equation (6.7) yields
q
B
=
V
y
A
∗
¯y
∗
I
x
+ q
A
. (6.23)
In using this result, it is important to adhere to the convention of Figure 6.34 (a) that
A
∗
is that part of the section traversed in passing clockwise from A to B. However,
A
∗
¯y
∗
for the complete section (shaded + unshaded) is zero and hence
(A
∗
¯y
∗
)
shaded
= −(A
∗
¯y
∗
)
unshaded
. (6.24)
It follows that we can pass in the anticlockwise direction from A to B, provided the
area traversed A
∗
is treated as negative in equation (6.23).
Equation (6.23) defines the shear flow q throughout the section except for an
arbitrary additive constant. Suppose we choose an arbitrary fixed point A and write
q
A
=C, where C is unknown. Equation (6.23) then takes the form