Басниев К.С. Энциклопедия газовой промышленности
Подождите немного. Документ загружается.


1 ОБЩИЕ СВЕДЕНИЯ
— производительность приемных устройств. В
случае двигателей при отсутствии
точных
дан-
ных можно исходить из следующих практичес-
ких рекомендаций по поводу технической про-
изводительности:
Мощность,
кВт
0-15
15-40
40-75
>75
Производительность,
%
0,75
-
0,85
0,85
-
0,90
0,90
-
0,92
<0,92
— кажущаяся мощность:
Она требует знания коэффициента мощности.
Ориентировочные данные:
cos ф = 1 - обогрев, освещение лампами накали-
вания,
cos ф = 0,75 -
0,92
- электродвигатели в нормаль-
ном режиме,
cos Ф • 0,30 - 0,50 - электродвигатели при вклю-
чении,
cos ф = 0,85 - освещение дневного света с ком-
пенсацией,
cos ф в 0,30 - 0,50 - освещение дневного света
без
компенсации.
1.6.2.2.
Сечение, необходимое
с
учетом разогрева
при нормальном режиме
Максимально допустимый при нормальном ре-
жиме
ток - это ток, который
вызывает
в состоянии
термического равновесия разогрев проводников
до максимально разрешенной температуры.
Она зависит от условий прокладки кабеля (на
открытом воздухе, в грунте на разных глубинах за-
ложения, на планшетах и т.д.) и условий окружаю-
щей
среды (близость других кабелей, солнечное
излучение, сопротивление грунта).
Для кабелей, проложенных в фунте, допусти-
мые температуры и удельное термическое сопро-
тивление таковы:
— проводка низкого напряжения: 20°С и 100°С •
•
см
•
Вт-
1
,
—
проводка среднего напряжения: 20°С
и
85°С •
•
см
•
Вт-
1
.
Для проводки на планшетах на открытом возду-
хе допустимая температура воздуха 30°С.
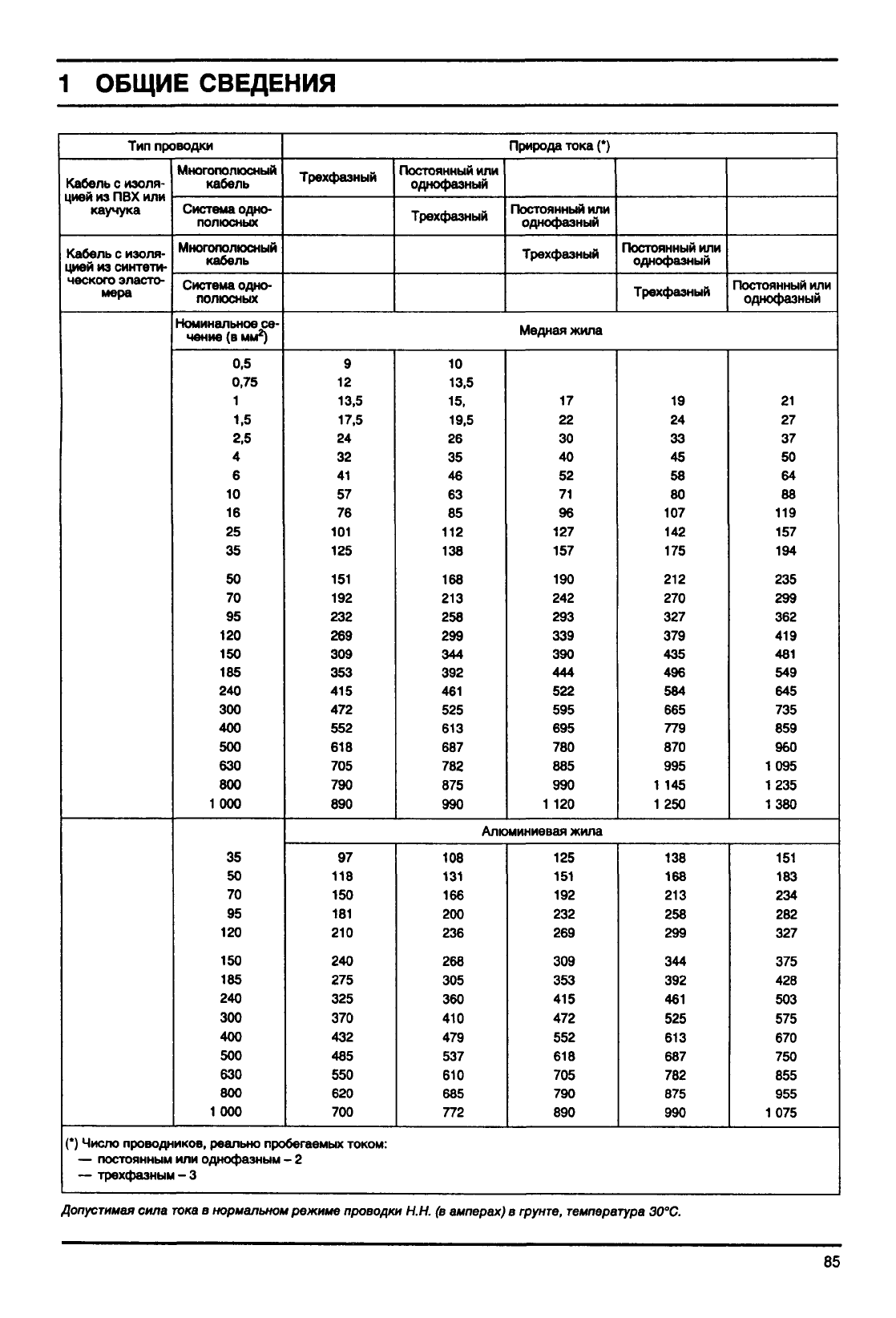
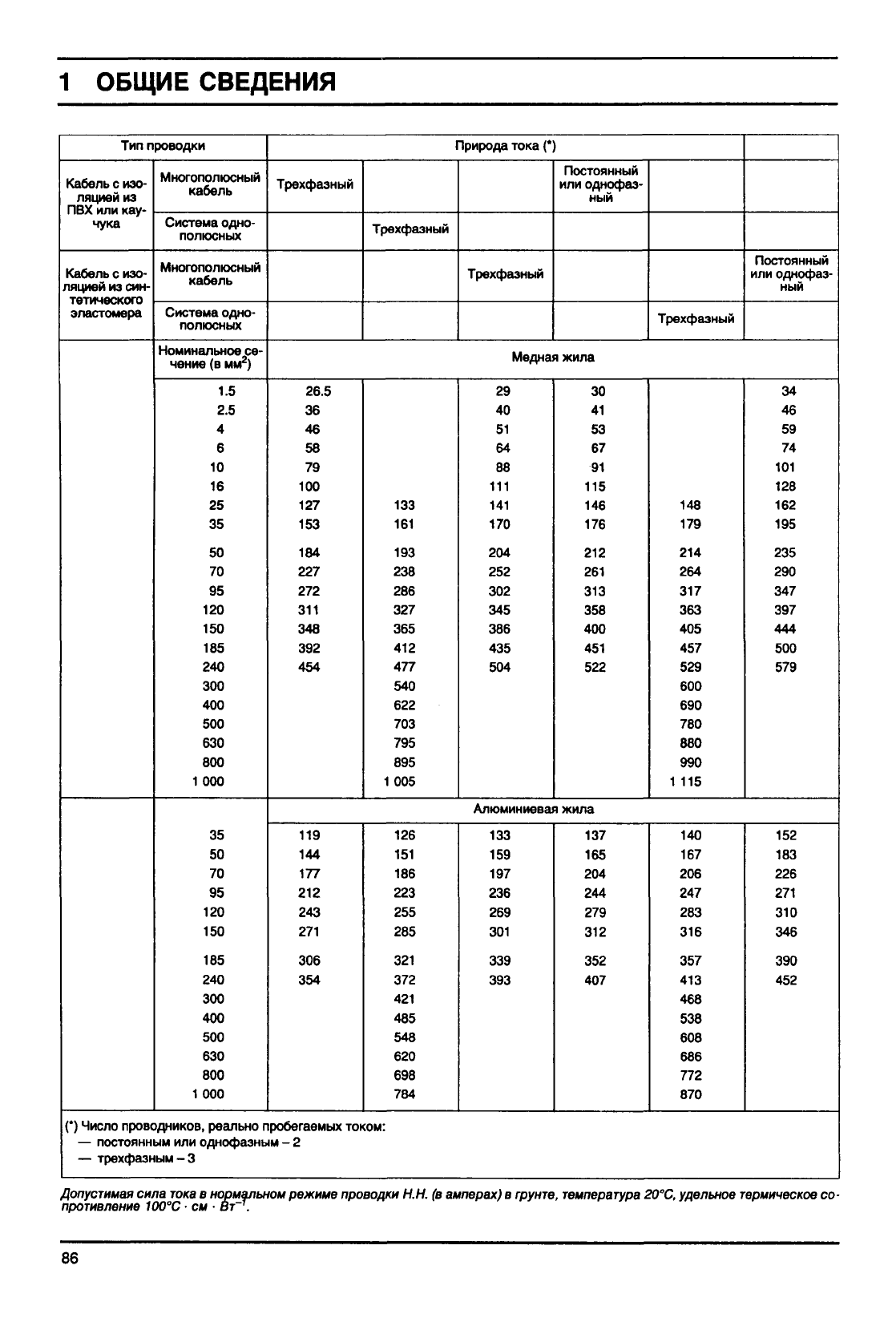
Для ориентировки, в таблицах с. 85 и 86 собраны
допустимые
силы
тока в распространенных про-
водниках низкого напряжения.
В случае различных
удельных
термических со-
противлений грунта или наличия поблизости дру-
гих электрических кабелей, а также для проводки
на открытом воздухе при различных температурах
воздуха следует применять поправочные коэффи-
циенты. Максимальные температуры в нормаль-
ном режиме меняются в зависимости от природы
изоляции. Вообще говоря, они не должны превы-
шать 60 - 70°С.
1.6.2.3.
Сечение, необходимое
с
учетом разогрева
при коротком замыкании
В случае короткого замыкания через кабели
проходит значительно более высокий ток, чем тот,
на который они рассчитаны в нормальном режиме.
Однако продолжительность прохождения высоко-
го тока
очень
мала, порядка долей секунды, как
правило.
Максимально допустимые в конце короткого за-
мыкания температуры зависят от природы изоля-
ции;
они меняются примерно между 120 и 180°С.
Вообще говоря, проблемы короткого замыкания
следует рассматривать для проводки среднего на-
пряжения; при низком напряжении ограничения
обычно
менее жестки.
Конструкторы дают кривые конечной темпера-
туры
в зависимости от природы проводника и на-
чальной
температуры.
Приближенно сечение:
S=
ICC
в которой
S - сечение проводника, в мм
2
,
!„,-
сила тока при коротком замыкании, в амперах,
t- продолжительность короткого замыкания, в се-
кундах,
в/- конечная температура, в °С,
6/-
начальная температура, в °С,
к
- коэффициент = 11 (медь) и 7 (алюминий).
1.6.2.4.
Сечение, необходимое для
учета падения напряжения
Падение
напряжения зависит от характеристик
предполагаемых приемных устройств, в принципе
это 3% для освещения, 5% для других случаев.
В случае запуска двигателей можно допустить
более значительное кратковременное падение на-
пряжения, которое не должно превышать 10
-15%.
Избираемое
сечение дается формулами:
— для постоянного тока:
допуст
2/I
— для переменного тока:
• однофазного:
_ допуст
2/I
трехфазного:
AU
допуст
-Уз/i
при
этом:
R - кажущееся сопротивление проводника при
температуре
функционирования, в омах на км;
Leo - индуктивное сопротивление в омах на км за-
висит от изоляции и пространственного
размеще-
ния. При отсутствии
точных
значений, данных кон-
структором, берут:
— для трехфазных кабелей:
Leo = 0,08 Ом
•
км-' при низком напряжении,
Leo = 0,10 - 0,15 Ом
•
кмг
1
при среднем напряжении.
84
1
ОБЩИЕ СВЕДЕНИЯ
Тип проводки
Кабель с изоля-
цией
из ПВХ или
каучука
Кабель с изоля-
цией
из синтети-
ческого
эласто-
мера
Многополюсный
кабель
Система
одно-
полюсных
Многополюсный
кабель
Система
одно-
полюсных
Номинальное се-
«||1| цд|Ч /в уц2\
IUI If IU \О MM J
0,5
0,75
1
1.5
2,5
4
6
10
16
25
35
50
70
95
120
150
185
240
300
400
500
630
800
1000
35
50
70
95
120
150
185
240
300
400
500
630
800
1000
Природа
тока (*)
Трехфазный
Постоянный
или
однофазный
Трехфазный
Постоянный
или
однофазный
Трехфазный
Постоянный
или
однофазный
Трехфазный
Постоянный
или
однофазный
Медная
жила
9
12
13,5
17,5
24
32
41
57
76
101
125
151
192
232
269
309
353
415
472
552
618
705
790
890
10
13,5
15,
19,5
26
35
46
63
85
112
138
168
213
258
299
344
392
461
525
613
687
782
875
990
17
22
30
40
52
71
96
127
157
190
242
293
339
390
444
522
595
695
780
885
990
1
120
19
24
33
45
58
80
107
142
175
212
270
327
379
435
496
584
665
779
870
995
1
145
1250
21
27
37
50
64
88
119
157
194
235
299
362
419
481
549
645
735
859
960
1095
1235
1380
Алюминиевая жила
97
118
150
181
210
240
275
325
370
432
485
550
620
700
108
131
166
200
236
268
305
360
410
479
537
610
685
772
125
151
192
232
269
309
353
415
472
552
618
705
790
890
138
168
213
258
299
344
392
461
525
613
687
782
875
990
151
183
234
282
327
375
428
503
575
670
750
855
955
1075
(*)
Число
проводников, реально пробегаемых током:
— постоянным или однофазным - 2
— трехфазным-3
Допустимая
сила
тока
в
нормальном
режиме проводки Н.Н. (в
амперах)
в
грунте,
температура
30°С.
85
1
ОБЩИЕ
СВЕДЕНИЯ
Тип проводки
Кабель
с
изо-
ляцией
из
ПВХ или кау-
чука
Кабель
с
изо-
ляцией из син-
тетического
эластомера
Многополюсный
кабель
Система одно-
полюсных
Многополюсный
кабель
Система одно-
полюсных
Номинальное се-
чение (в
мм
2
)
1.5
2.5
4
6
10
16
25
35
50
70
95
120
150
185
240
300
400
500
630
800
1000
35
50
70
95
120
150
185
240
300
400
500
630
800
1000
Природа тока
(*)
Трехфазный
Трехфазный
Трехфазный
Постоянный
или однофаз-
ный
Трехфазный
Постоянный
или однофаз-
ный
Медная жила
26.5
36
46
58
79
100
127
153
184
227
272
311
348
392
454
133
161
193
238
286
327
365
412
477
540
622
703
795
895
1
005
29
40
51
64
88
111
141
170
204
252
302
345
386
435
504
30
41
53
67
91
115
146
176
212
261
313
358
400
451
522
148
179
214
264
317
363
405
457
529
600
690
780
880
990
1
115
34
46
59
74
101
128
162
195
235
290
347
397
444
500
579
Алюминиевая жила
119
144
177
212
243
271
306
354
126
151
186
223
255
285
321
372
421
485
548
620
698
784
133
159
197
236
269
301
339
393
137
165
204
244
279
312
352
407
140
167
206
247
283
316
357
413
468
538
608
686
772
870
152
183
226
271
310
346
390
452
(*)
Число проводников, реально пробегаемых током:
—
постоянным
или
однофазным
- 2
—
трехфазным
- 3
Допустимая
сила
тока
в
нормальном
режиме
проводки
Н.Н. (в
амперах)
в
грунте,
температура
20"С,
удельное
термическое
со-
противление
100°С
•
см
•
вт~\
86
1 ОБЩИЕ СВЕДЕНИЯ
— для однополюсных кабелей:
Leo - 0,1 - 0,2 Ом
•
км-',
/- длина кабеля, в километрах,
I - сила передаваемого тока, в амперах, при нор-
мальном режиме и, возможно, при перегрузке,
Ф
- коэффициент мощности установки.
Совокупность этих
данных
позволяет выбрать
наиболее подходящее нормализованное сечение.
1.6.3.
Трансформаторы
В основном используются трансформаторы
С.Н/Н.Н
(среднее напряжение-низкое напряжение).
Они устанавливаются либо в приборах, либо на
столбах.
Выбираются трансформаторы из серии норма-
лизованных трансформаторов, соответствующих
норме
E.D.F.
HN 52 S 20.
Предписанные мощности: 100,160,250,400, 630
и 1000 кВт.
Напряжение короткого замыкания для мощнос-
тей этой серии до 630 кВт включительно составля-
ет 4%, для 1000 кВт - 5%.
Соединения первичного и вторичного контуров:
Yz11 до 160 кВт,
Dy11
начиная
с 250 кВт.
Эти два варианта исключают прохождение
тройных частот первичного или вторичного тока и
допускают четырехпроводное распределение
220/380 В.
Первичная обмотка снабжена двумя регулиро-
вочными контактами ±2,5%, управляемыми без на-
пряжения, которые позволяют уточнить вторичное
напряжение в зависимости от напряжения сети
С.Н., если предписанное вторичное напряжение
составляет 380 В.
Чтобы
соединяться
параллельно,
трансформа-
торы должны иметь одинаковую полярность, т.е.
для одного и того же первичного питания, напря-
жения между вторичными границами должны
быть
в фазе, откуда следующие требования к транс-
форматорам:
— одинаковое отношение трансформации,
— одинаковое напряжение короткого замыкания,
— одинаковое направление векторного вращения
фаз.
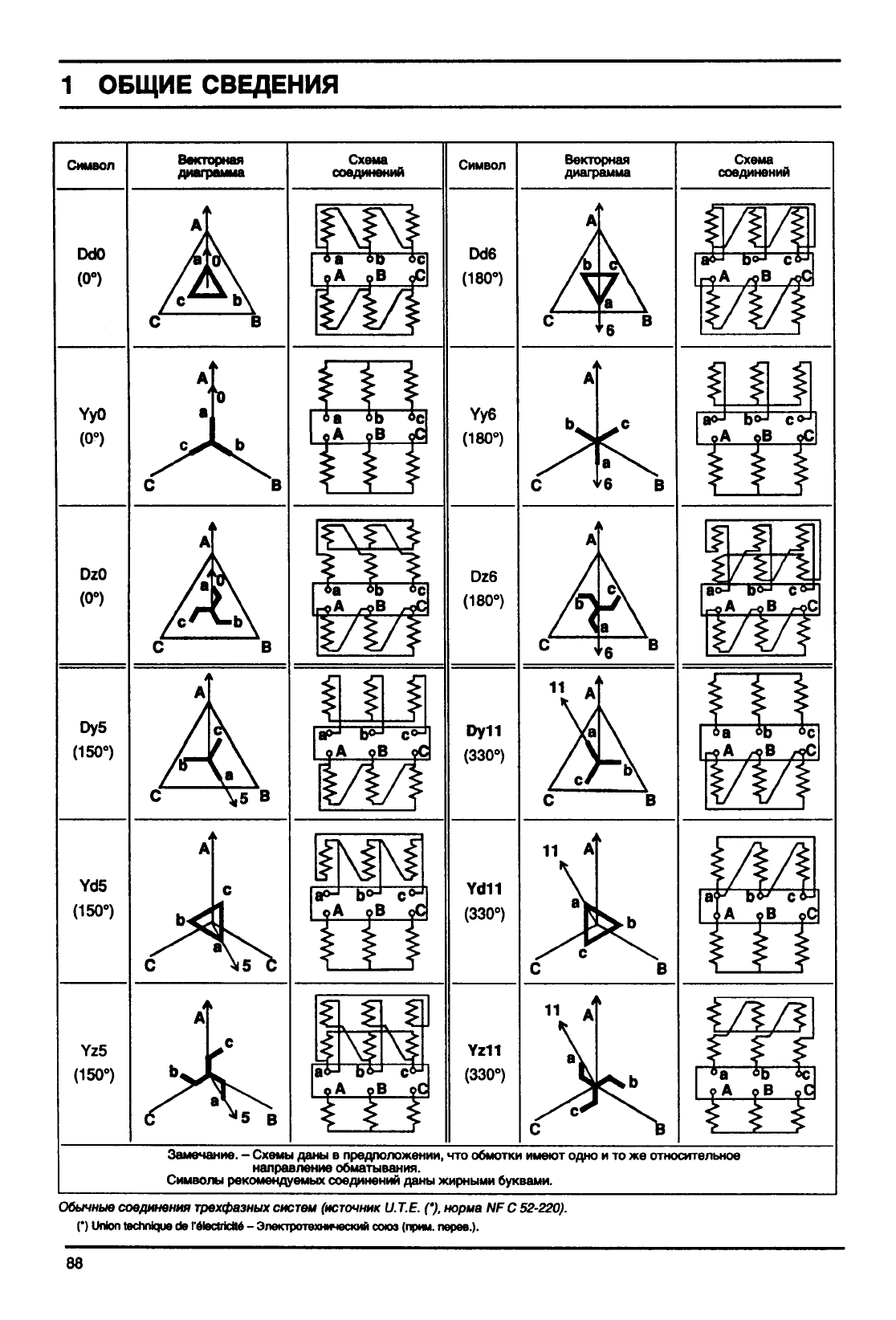
На с. 88
даны
принятые способы соединений
трехфазных
систем.
1.6.4.
Электродвигатели
Двигатели и генераторы абсолютно обратимы.
1.6.4.1.
Электродвигатели
постоянного тока
1.6.4.1.1.
Преимущества
Электродвигатель постоянного тока удобен
тем,
что может питаться от сети постоянного тока
или переменного тока через выпрямители, либо от
аккумуляторов.
У него есть важные достоинства: переменность
скорости,
возможность регулировки и привода
Всегда
можно
получить
произвольное отно-
шение:
пусковая пара
номинальная пара
1.6.4.1.2.
Неудобства
Он дороже асинхронного двигателя, а наличие
коллектора и щеток требует соответствующего об-
служивания.
Он плохо подходит для реализации невоспламе-
няющихся моторов.
1.6.4.1.3.
Области приложения
1.6.4.1.3.1.
Моторы
с последовательным возбуждением
Применение: электрическая тяга, насосы и вен-
тиляторы слабой нагрузки.
Характеристики: мощная пусковая пара, изме-
няемая с нагрузкой скорость, большие обороты на
холостом ходу.
1.6.4.1.3.2. Шунтовые моторы
Применение: станки, запускаемые вхолостую.
Характеристики:
слабая
пусковая пара, посто-
янная
скорость.
1.6.4.1.3.3. Компаунд-моторы
Применение: подъем и тяга, насосы и вентиля-
торы с большой инерцией.
Характеристики: повышенная пусковая
пара,
ус-
тойчивость скорости.
1.6.4.2.
Электродвигатели
перемен-
ного тока
Как правило, двигатели переменного тока пи-
таются низким напряжением (трехфазный ток
220,
380 или 660 В) примерно до 150 кВт мощнос-
ти,
при С.Н. (трехфазный ток 6600 В) - выше этой
мощности.
Для двигателей переменного тока как высокого,
так и низкого напряжения характерно большое
разнообразие электрических, динамических и тех-
нологических характеристик, тем не менее, не счи-
тая небольшого количества специфических мото-
ров специального назначения, можно говорить о
двух
семействах:
— асинхронные двигатели:
• с неподвижными обмотками,
• с роторной обмоткой;
— синхронные двигатели,
включая
асинхронные
синхронизованные.
Они существенно различаются по:
— значениям пары и тока при пуске,
— переменности скорости при нормальном режиме,
— значениям коэффициента мощности и произво-
дительности в зависимости от нагрузки.
87
1 ОБЩИЕ СВЕДЕНИЯ
Символ
Векторная
диаграмма
Схема
соединений
Символ
Векторная
диаграмма
Схема
соединений
DdO
(0°)
В
Dd6
(180°)
YyO
(0°)
>А оВ
Yy6
(180°)
>А оВ
DzO
(0°)
~ol
Щ
&ё
В
Dz6
(180°)
ffl
асм
D°-" с
0
-
1
А
Dy5
(150°)
\5 В
11
Dy11
(330°)
с/
в
Yd5
(150°)
С \б С
11
А
Yd11
(330°)
Yz5
(150°)
aJj Б*^ с»-
П А
»А оВ
Yz11
(330°)
а
А о В
Замечание. -
Схемы
даны
в предположении, что обмотки имеют одно и то же относительное
направление обматывания.
Символы рекомендуемых соединений
даны
жирными буквами.
Обычные
соединения
трехфазных
систем
(источник
U.T.E.
('), норма NF С 52-220).
(*) Union technique de r6lectricit6 - Электротехнический союз
(прим.
перев.).
88
1 ОБЩИЕ СВЕДЕНИЯ
1.6.4.2.1.
Асинхронные двигатели
1.6.4.2.1.1.
Асинхронные двигатели
с неподвижными обмотками
Они бывают
двух
основных типов в зависимости
от конструкции ротора:
— ротор с простым корпусом,
— ротор с двойным корпусом или с глубокими па-
зами.
Эти роторы допускают возможность выбора
характеристик пары и тока пуска:
— роторы с простым корпусом имеют:
• относительно слабую пусковую пару (0,5 -
0,9 С„),
• максимальную пару, достигающую 3,5 С„,
• силу тока пуска, меняющуюся от 4,5 до 5,5 \
т
(С„-
номинальная пара, 1„- номинальный ток);
— роторы с двойным корпусом или с глубокими па-
зами
имеют:
• относительно высокую пусковую пару, поряд-
ка
2С„,
• максимальную пару того же порядка,
• пусковую силу тока, меняющуюся от 5 до 6,51„.
Эти двигатели естественно использовать для
интенсивной работы и в опасных условиях, по-
скольку:
— простота принципа действия ротора на прямых
контактах сообщает им большую механическую
мощность,
— скорость слабо меняется (примерно на 2%) при
нагрузке,
— обслуживание отличается простотой.
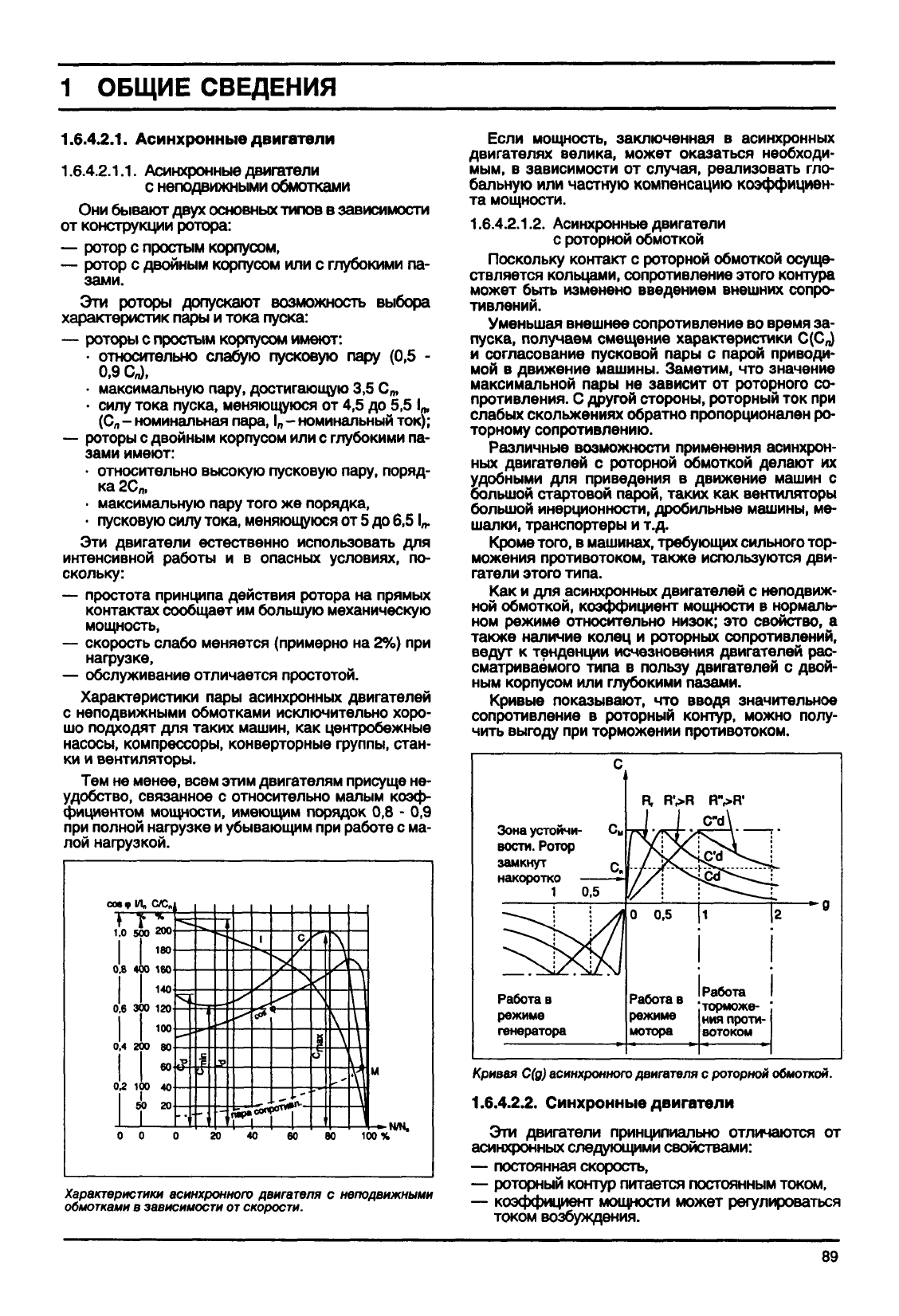
Характеристики пары асинхронных двигателей
с неподвижными обмотками исключительно хоро-
шо подходят для таких машин, как центробежные
насосы,
компрессоры, конверторные группы, стан-
ки
и вентиляторы.
Тем не менее, всем этим двигателям присуще не-
удобство, связанное с относительно малым коэф-
фициентом мощности, имеющим порядок 0,8 - 0,9
при
полной нагрузке и убывающим при работе с ма-
лой нагрузкой.
сое
И.С/С
\
1
0
0
0
0
(
uJ
8
4
ю
zoo
180
X)
160
140
4
2pn fin
Я. 1
s
60
Ю
40
3
20
—
-•
—
I
3
у
У
i
у
'
С
/
\
)
0 0 20 40 60
Л
й
о
I
\
W
и
\
\
I
м
80
100%
Если
мощность, заключенная в асинхронных
двигателях велика, может оказаться необходи-
мым,
в зависимости от случая, реализовать гло-
бальную
или частную компенсацию коэффициен-
та мощности.
1.6.4.2.1.2. Асинхронные двигатели
с роторной обмоткой
Поскольку контакт с роторной обмоткой осуще-
ствляется кольцами, сопротивление этого контура
может
быть
изменено введением внешних сопро-
тивлений.
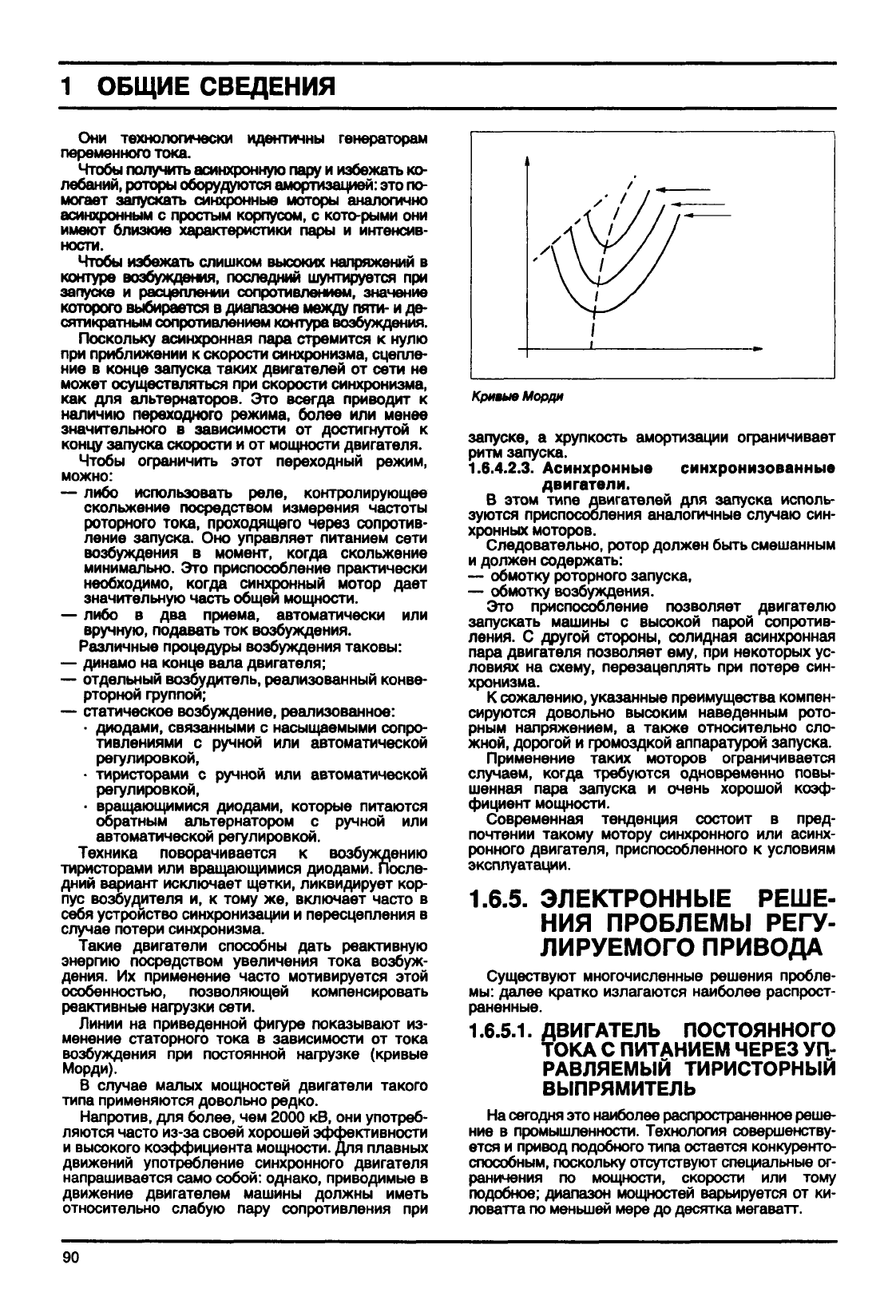
Уменьшая
внешнее сопротивление во время за-
пуска,
получаем смещение характеристики С(С„)
и согласование пусковой пары с парой приводи-
мой
в движение машины. Заметим, что значение
максимальной пары не зависит от роторного со-
противления. С другой стороны, роторный ток при
слабых
скольжениях обратно пропорционален ро-
торному сопротивлению.
Различные
возможности применения асинхрон-
ных двигателей с роторной обмоткой
делают
их
удобными для приведения в движение машин с
большой стартовой парой, таких как вентиляторы
большой инерционности, дробильные машины, ме-
шалки, транспортеры и т.д.
Кроме
того, в машинах, требующих сильного тор-
можения противотоком, также используются дви-
гатели этого типа.
Как и для асинхронных двигателей с неподвиж-
ной обмоткой, коэффициент мощности в нормаль-
ном режиме относительно низок; это свойство, а
также наличие колец и роторных сопротивлений,
ведут к тенденции исчезновения двигателей рас-
сматриваемого типа в пользу двигателей с двой-
ным корпусом или глубокими пазами.
Кривые показывают, что вводя значительное
сопротивление в роторный контур, можно полу-
чить выгоду при торможении противотоком.
с
Зона
устойчи- С
ы
вости. Ротор
замкнут
с<
накоротко -
1 0,5
Работав
режиме
генератора
R, R>R RVR
1
0
0,5
Работав
режиме
мотора
1
Работа
торможе-
ния проти-
вотоком
2
"
Характеристики
асинхронного
двигателя
с неподвижными
обмотками
в
зависимости
от
скорости.
Кривая
С(д)
асинхронного
двигателя
с
роторной
обмоткой.
1.6.4.2.2.
Синхронные двигатели
Эти двигатели принципиально отличаются от
асинхронных следующими свойствами:
— постоянная скорость,
— роторный контур питается постоянным током,
— коэффициент мощности может регулироваться
током
возбуждения.
89
1 ОБЩИЕ СВЕДЕНИЯ
Они технологически идентичны генераторам
переменного тока.
Чтобы
получить асинхронную пару и избежать ко-
лебаний, роторы оборудуются амортизацией: это по-
могает запускать синхронные моторы аналогично
асинхронным с простым корпусом, с которыми они
имеют близкие характеристики пары и интенсив-
ности.
Чтобы
избежать слишком высоких напряжений в
контуре возбуждения, последний шунтируется при
запуске и расцеплении сопротивлением, значение
которого
выбирается в диапазоне между пяти- и де-
сятикратным сопротивлением контура возбуждения.
Поскольку асинхронная пара стремится к
нулю
при
приближении к скорости синхронизма, сцепле-
ние в конце запуска таких двигателей от сети не
может осуществляться при скорости синхронизма,
как
для альтернаторов. Это всегда приводит к
наличию переходного режима, более или менее
значительного в зависимости от достигнутой к
концу запуска скорости и от мощности двигателя.
Чтобы
ограничить этот переходный режим,
можно:
— либо использовать реле, контролирующее
скольжение посредством измерения частоты
роторного
тока, проходящего через сопротив-
ление запуска. Оно управляет питанием сети
возбуждения в момент, когда скольжение
минимально. Это приспособление практически
необходимо, когда синхронный мотор дает
значительную часть общей мощности.
— либо в два приема, автоматически или
вручную, подавать ток возбуждения.
Различные
процедуры возбуждения таковы:
— динамо на конце
вала
двигателя;
— отдельный возбудитель, реализованный конве-
рторной группой;
— статическое возбуждение, реализованное:
• диодами, связанными с насыщаемыми сопро-
тивлениями с ручной или автоматической
регулировкой,
• тиристорами с ручной или автоматической
регулировкой,
• вращающимися диодами, которые питаются
обратным альтернатором с ручной или
автоматической регулировкой.
Техника поворачивается к возбуждению
тиристорами или вращающимися диодами. После-
дний вариант исключает щетки, ликвидирует кор-
пус возбудителя и, к тому же, включает часто в
себя устройство синхронизации и пересцепления в
случае
потери синхронизма.
Такие двигатели способны
дать
реактивную
энергию
посредством увеличения тока возбуж-
дения. Их применение часто мотивируется этой
особенностью, позволяющей компенсировать
реактивные нагрузки сети.
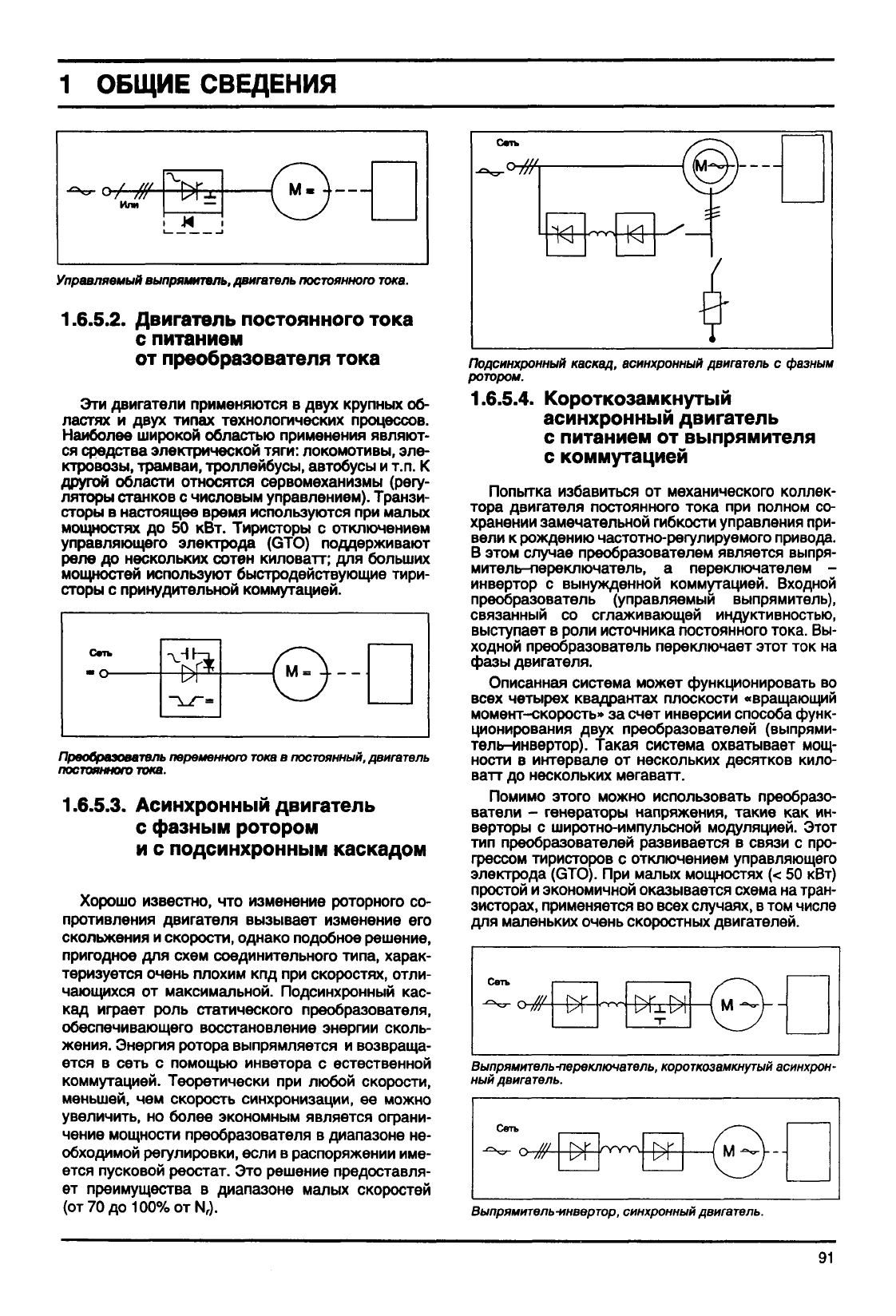
Линии
на приведенной фигуре показывают из-
менение статорного тока в зависимости от тока
возбуждения при постоянной нагрузке (кривые
Морди).
В
случае
малых
мощностей двигатели такого
типа применяются довольно редко.
Напротив, для более, чем 2000 кВ, они употреб-
ляются часто из-за своей хорошей эффективности
и высокого коэффициента мощности. Для
плавных
движений употребление синхронного двигателя
напрашивается само собой: однако, приводимые в
движение двигателем машины должны иметь
относительно слабую пару сопротивления при
Кривые Морди
запуске,
а хрупкость амортизации ограничивает
ритм запуска.
1.6.4.2.3.
Асинхронные синхронизованные
двигатели.
В этом типе двигателей для запуска исполь-
зуются приспособления аналогичные
случаю
син-
хронных моторов.
Следовательно, ротор должен
быть
смешанным
и должен содержать:
— обмотку роторного запуска,
— обмотку возбуждения.
Это приспособление позволяет двигателю
запускать машины с высокой парой сопротив-
ления. С другой стороны, солидная асинхронная
пара двигателя позволяет ему, при некоторых ус-
ловиях
на схему, перезацеплять при потере син-
хронизма.
К
сожалению, указанные преимущества компен-
сируются довольно высоким наведенным рото-
рным напряжением, а также относительно сло-
жной,
дорогой и громоздкой аппаратурой запуска.
Применение таких моторов ограничивается
случаем, когда требуются одновременно повы-
шенная пара запуска и очень хорошей коэф-
фициент мощности.
Современная тенденция состоит в пред-
почтении такому мотору синхронного или асинх-
ронного
двигателя, приспособленного к условиям
эксплуатации.
1.6.5.
ЭЛЕКТРОННЫЕ РЕШЕ-
НИЯ ПРОБЛЕМЫ РЕГУ-
ЛИРУЕМОГО ПРИВОДА
Существуют многочисленные решения пробле-
мы:
далее
кратко излагаются наиболее распрост-
раненные.
1.6.5.1.
ДВИГАТЕЛЬ ПОСТОЯННОГО
ТОКА С ПИТАНИЕМ ЧЕРЕЗ УП-
РАВЛЯЕМЫЙ ТИРИСТОРНЫЙ
ВЫПРЯМИТЕЛЬ
На сегодня это наиболее распространенное реше-
ние в промышленности. Технология совершенству-
ется и привод подобного типа остается конкуренто-
способным,
поскольку отсутствуют специальные ог-
раничения по мощности, скорости или тому
подобное; диапазон мощностей варьируется от ки-
ловатта
по меньшей мере до десятка мегаватт.
90
1 ОБЩИЕ СВЕДЕНИЯ
Управляемый
выпрямитель,
двигатель постоянного
тока.
1.6.5.2.
Двигатель постоянного тока
с
питанием
от преобразователя тока
Эти
двигатели применяются в
двух
крупных
об-
ластях и
двух
типах технологических процессов.
Наиболее широкой областью применения
являют-
ся средства электрической тяги: локомотивы, эле-
ктровозы, трамваи, троллейбусы,
автобусы
и т.п. К
другой области относятся сервомеханизмы (регу-
ляторы
станков с
числовым
управлением). Транзи-
сторы в настоящее время используются при малых
мощностях до 50 кВт. Тиристоры с отключением
управляющего электрода (GTO) поддерживают
реле
до нескольких сотен киловатт; для больших
мощностей
используют быстродействующие тири-
сторы с принудительной коммутацией.
Преобразователь
переменного
тока
в
постоянный,
двигатель
постоянного
тока.
1.6.5.3.
Асинхронный двигатель
с
фазным ротором
и
с подсинхронным каскадом
Хорошо известно, что изменение роторного со-
противления двигателя
вызывает
изменение его
скольжения и скорости, однако подобное решение,
пригодное для схем соединительного типа, харак-
теризуется
очень
плохим кпд при скоростях, отли-
чающихся от максимальной. Подсинхронный кас-
кад
играет
роль
статического преобразователя,
обеспечивающего восстановление энергии сколь-
жения.
Энергия ротора выпрямляется и возвраща-
ется
в сеть с помощью инветора с естественной
коммутацией.
Теоретически при любой скорости,
меньшей,
чем скорость синхронизации, ее можно
увеличить, но более экономным является ограни-
чение мощности преобразователя в диапазоне не-
обходимой регулировки, если в распоряжении име-
ется
пусковой реостат. Это решение предоставля-
ет
преимущества в диапазоне малых скоростей
(от
70 до
100%
от N
f
).
Сеть
Подсинхронный
каскад,
асинхронный
двигатель
с
фазным
ротором.
1.6.5.4.
Короткозамкнутый
асинхронный двигатель
с
питанием от выпрямителя
с
коммутацией
Попытка избавиться от механического коллек-
тора двигателя постоянного тока при полном со-
хранении замечательной гибкости управления при-
вели к рождению частотно-регулируемого привода.
В этом случае преобразователем является
выпря-
митель-переключатель, а переключателем -
инвертор с вынужденной коммутацией. Входной
преобразователь (управляемый выпрямитель),
связанный со сглаживающей индуктивностью,
выступает в роли источника постоянного тока. Вы-
ходной преобразователь переключает этот ток на
фазы двигателя.
Описанная система может функционировать во
всех четырех квадрантах плоскости «вращающий
момент-скорость» за счет инверсии способа функ-
ционирования
двух
преобразователей (выпрями-
тель-инвертор). Такая система охватывает мощ-
ности в интервале от нескольких десятков кило-
ватт до нескольких мегаватт.
Помимо
этого можно использовать преобразо-
ватели - генераторы напряжения, такие как ин-
верторы с широтно-импульсной модуляцией. Этот
тип преобразователей развивается в связи с про-
грессом
тиристоров с отключением управляющего
электрода
(GTO). При малых мощностях (< 50 кВт)
простой и экономичной оказывается схема на тран-
зисторах,
применяется во всех случаях, в том числе
для маленьких
очень
скоростных двигателей.
Выпрямитель-переключатель,
короткозамкнутый
асинхрон-
ный
двигатель.
Выпрямитель-инвертор,
синхронный
двигатель.
91
1 ОБЩИЕ СВЕДЕНИЯ
1.6.5.5.
Синхронный двигатель
с
питанием
от выпрямителя-инвертора
с
авторегулировкой
Это решение включает первый входной преоб-
разователь с питанием от сети и второй, управляе-
мый машиной, которые разделены сглаживающей
индуктивностью. В схеме работы двигателя преоб-
разователь со стороны сети функционирует как
выпрямитель и регулирует интенсивность на про-
межуточной ступени к постоянному току; второй
преобразователь функционирует как вспомога-
тельный
инвертор и переключает ток на
фазы
ма-
шины.
Переключение одной
фазы
статора на сле-
дующую определяется либо по отметкам положе-
ния ротора, либо, проще
всего,
- по фазе
напряжения статора. Необходимая реактивная
энергия
предоставляется машиной.
Такой привод обычно реверсивен и позволяет
функционировать в
четырех
квадрантах плоскости
"крутящий момент-скорость".
Для
малых
и средних мощностей применяется
технология преобразователей питания двигателей
постоянного тока. Для очень больших мощностей
предпочтительно используются выпрямительные
лампы среднего напряжения (от 5 до 20 кВ) на ти-
ристорах, управляемых оптикоэлектронными сис-
темами.
1.6.5.6.
Синхронный
или асинхронный двигатель
с
питанием от циклического
преобразователя
частоты
Реверсивные преобразователи, используемые
для управления двигателями постоянного тока в
4-х квадрантах плоскости "крутящий момент-ско-
рость",
могут по своему определению устанавли-
вать
ток с переменными частотой и амплитудой.
Преобразователь, реверсивный по фазе, может
использоваться для питания двигателя перемен-
ного
тока с непременным условием такого управ-
ления
тремя фазами,
чтобы
получить на
выходе
переменные напряжения, с симметричным сдвигом
по фазе на 120°. Принципиально, что диапазон из-
менений частот на
выходе
не может превышать
треть входной частоты, поэтому подобное решение
также применяется для медленных двигателей (за
исключением случая, когда имеется автономный
источник питания высокой частоты). Циклический
преобразователь частот по своей природе ревер-
сивен и может обеспечить обратимость крутящего
момента и
скорости.
1.6.6.
Процесс
запуска
синхронного или
асинхронного двигателя
О запуске синхронного или асинхронного двига-
теля
можно говорить только, если точно известны
характеристики его крутящего момента и силы то-
ка,
а также характеристики момента сопротивле-
ния приводящейся в движение машины и ее инерт-
ность.
На самом
деле
не существует стратегии выбора
решения в этой области, в связи с чем невозможно
утверждать, что такой-то тип пускового устрой-
ства
является
наилучшим (см. таблицу на с. 93).
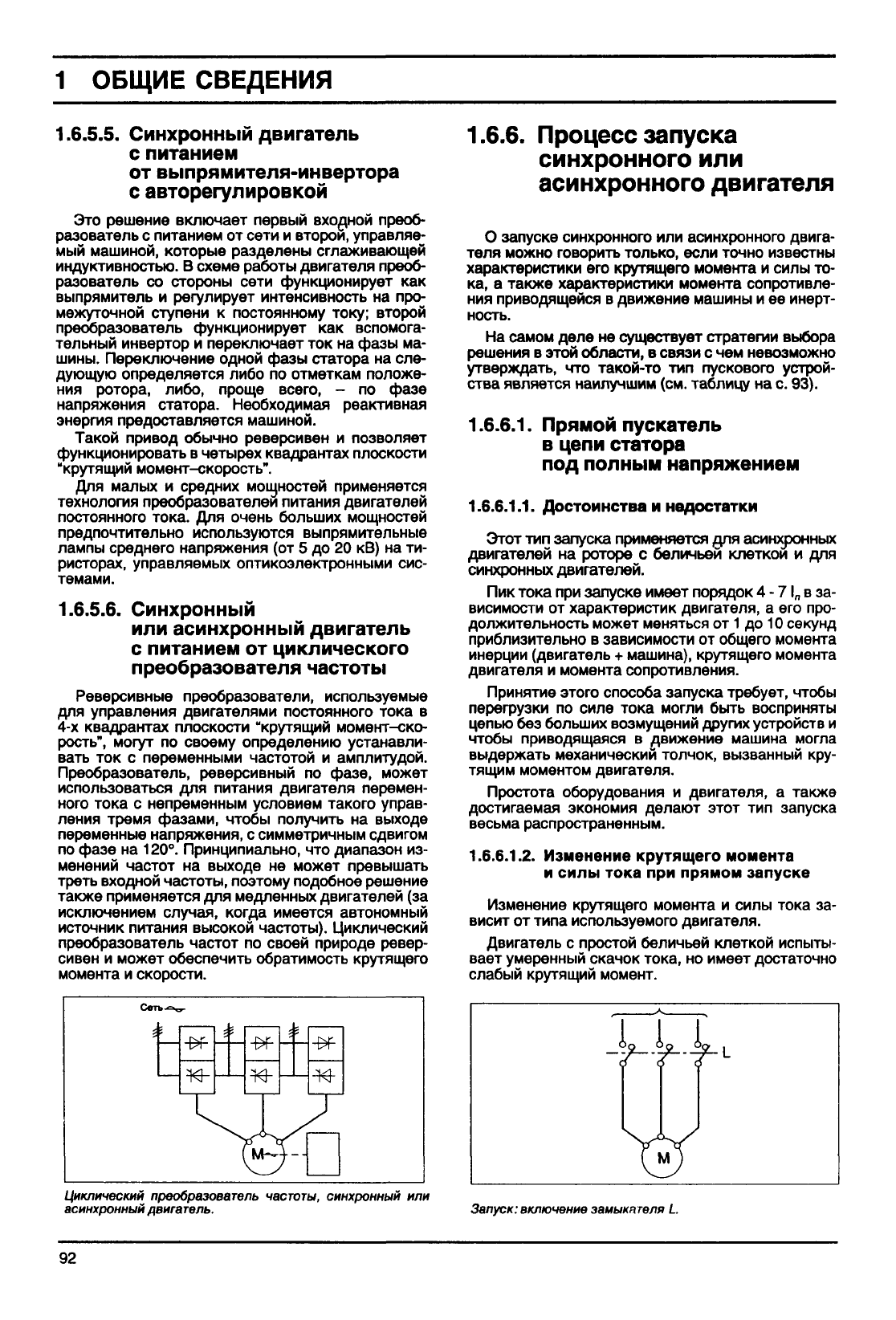
1.6.6.1.
Прямой пускатель
в цепи статора
под
полным напряжением
1.6.6.1.1.
Достоинства и недостатки
Этот тип запуска применяется для асинхронных
двигателей на роторе с беличьей клеткой и для
синхронных двигателей.
Пик тока при запуске имеет порядок 4 - 71„ в за-
висимости
от характеристик двигателя, а его про-
должительность может меняться от 1 до 10 секунд
приблизительно в зависимости от общего момента
инерции (двигатель + машина), крутящего момента
двигателя и момента сопротивления.
Принятие этого способа запуска требует,
чтобы
перегрузки
по силе тока могли
быть
восприняты
цепью без больших возмущений других устройств и
чтобы
приводящаяся в движение машина могла
выдержать механический толчок, вызванный кру-
тящим моментом двигателя.
Простота оборудования и двигателя, а также
достигаемая экономия
делают
этот тип запуска
весьма распространенным.
1.6.6.1.2.
Изменение крутящего момента
и
силы тока при прямом запуске
Изменение крутящего момента и силы тока за-
висит от типа используемого двигателя.
Двигатель с простой беличьей клеткой испыты-
вает умеренный скачок тока, но имеет достаточно
слабый крутящий момент.
Циклический
преобразователь
частоты,
синхронный или
асинхронный
двигатель.
Запуск:
включение
замыкателя
L.
92
1 ОБЩИЕ
СВЕДЕНИЯ
Основные характеристики
пусковых устройств
Преимущества
Недостатки
Области применения
1)
Прямое пусковое устройс-
тво: запуск под полным
на-
пряжением.
Прос
№
i
&,
легкость работы.
Большой пусковой крутящий
момент.
Используется для
двигателя
с
беличьей клеткой.
Толчок тока при запуске.
Маленькие
двигатели.
Любые двигатели при отсутст-
вии опасности больших
пи-
ков по силе тока.
2]
пускатель
в
цели статора:
напряжение
на
зажимах
двигателя снижено
за
счет
падения
напряжения
на
ре-
активных сопротивлениях
или
за
счет автотрансфор-
матора.
Ток
понижается
пропорционально напряже-
нию,
а
крутящий момент
-
пропорционально квадрату
снижения
напряжения.
простота.
Крутящий момент
возрастает
постепенно,
по
мере
набора скорости.
Используется
для
двигателя
с
беличьей клеткой.
Дорогой.
Необходимость
рас-
сеивания теплоты, выделяю-
щейся
на
сопротивлениях,
либо использования более
дорогих реактивных сопро-
тивлений
или
форматоров.
аЪтотранс-
Все
двигатели, приводящие
в
движение
установки
со
средним
противодействую-
щим
крутящим моментом,
нарастающим
постепенно
в
течение
периода запуска.
вариант предыдущего: пуска-
тель
с
переключением
со
звезды
на
треугольник.
Напряжение
на зажимах об-
мотки
двигателя снижено
в
отношении:
крутящий
момент
и
сила то-
ка
снижены
в 3
раза.
простота,
легкость работы.
Толчек тока уменьшен.
Используется для двигателя
с
беличьей клеткой.
юниженный пусковой крутя-
щий
момент.
Толчек тока
в
момент пере-
хода со звезды на треуголь-
маленькие двигатели низкого
напряжения,
приводящие
в
движение
установки
с ма-
лым моментом сопротивле-
ния
во
время запуска.
3)
пускатель
в
цепи ротора:
при подаче напряжения
двигатель работает
как
трансформатор, вторичная
обмотка
которого (ротор)
питает
сопротивления.
Ток
в
цепи снижается,
но
двигатель сохраняет
высо-
кий
пусковой крутящий
мо-
мент.
Ограничение тока
в
цепи.
Высокий пусковой крутящий
момент.
Дорогой.
Используется
для
двигателя
с
фазным рото-
ром,
более хрупким
и
более
дорогим,
чем
двигатель
с
беличьей клеткой.
Проблема рассеяния тепла
на
сопротивлениях.
Все
двигатели, приводящие
в
движение
установки
с
боль-
шим
моментом сопротивле-
ния,
такие
как
мостовые
краны, дробильные
маши-
ны.
Характеристики
пусковых
устройств.
Двигатель
с
двойной
беличьей
клеткой испыты-
вает
более
значительный
толчок
тока,
но
приго-
ден
для
запуска
машины
с
более
высоким момен-
том сопротивления.
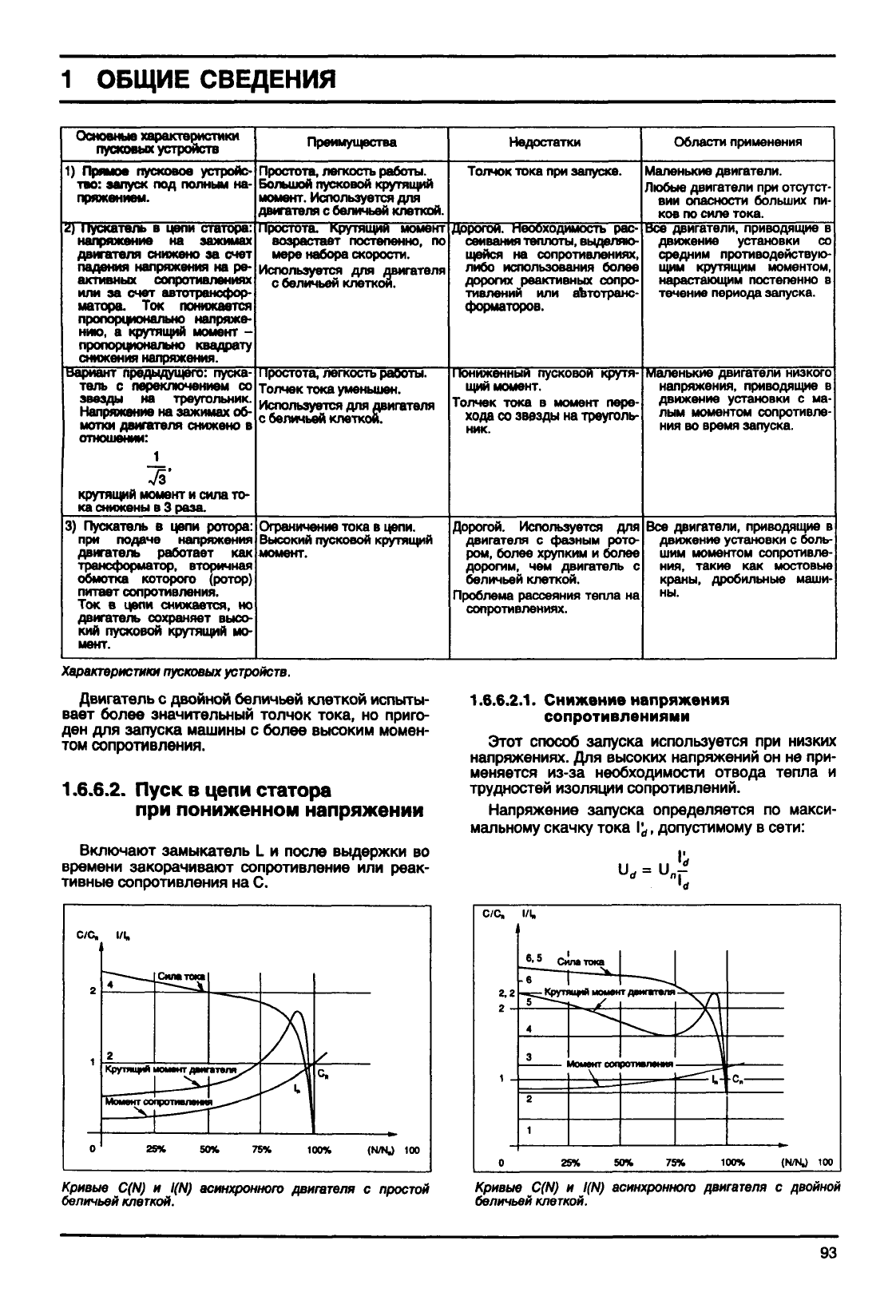
1.6.6.2.
Пуск
в
цепи статора
при пониженном напряжении
Включают
замыкатель
L и
после выдержки
во
времени закорачивают сопротивление
или
реак-
тивные
сопротивления на
С.
1.6.6.2.1.
Снижение напряжения
сопротивлениями
Этот
способ запуска используется
при
низких
напряжениях.
Для высоких напряжений
он не
при-
меняется
из-за необходимости
отвода
тепла
и
трудностей изоляции сопротивлений.
Напряжение
запуска
определяется
по
макси-
мальному
скачку тока \'
d
, допустимому
в
сети:
с/с.
2
1
0
I/I.
4
2
Сила
тока
Л
""•
-«
Крутящий момент двигателя./
•П=гН
l^
Момент солротивлеии
с.
25%
50% 75% 100% (N/NJ 100
С/С,
2.2
2
-
1
-
0
I/U
6.5
с
Г
6
Т^Крут,
4
з
1латока
НЦИЙИОМ0Н
\
2
1
__3 •
^^
ri
—•-
•
25%
50% 75% 100% (N/NJ 100
Кривые C(N)
и I(N)
асинхронного
двигателя
с
простой
беличьей
клеткой.
Кривые C(N)
и I(N)
асинхронною
двигателя
с
двойной
беличьей
клеткой.
93