Bhushan B. Handbook of Micro/Nano Tribology, Second Edition
Подождите немного. Документ загружается.

© 1999 by CRC Press LLC
profile departs from the D = 1.5 behavior at about 30 µm and those of ground-8 and lapped-8 profile
depart at about 100 µm. This behavior is probably due to the following reason. For any machining process,
there exists a critical length scale below which the surface remains unaffected during machining. For
grinding, this length scale is the grain size of the abrasive material, whereas for turning it is the tool
radius. Below this scale, the surface is formed by a natural process such as fracture. This natural process
seems to lead to the same type of surface fractal behavior with D = 1.5. At length scales larger than the
critical one, the machining processes flattens the surface and thus reduces the height differences between
two points on the surface. Thus, the structure function decreases at larger scales. As shown earlier, the
rms height depends on the total length, L, of the roughness sample as σ ≈ ω
l
D–2
= L
2–D
. Although the
structure function of the different surface profiles at small length scales are nearly the same, their rms
heights are quite different. This is because at larger length scales, which control the value of σ, the
structure functions are different with smoother surfaces having smaller values of S(τ).
4.3.3.3.2 Atomic Force Microscopy
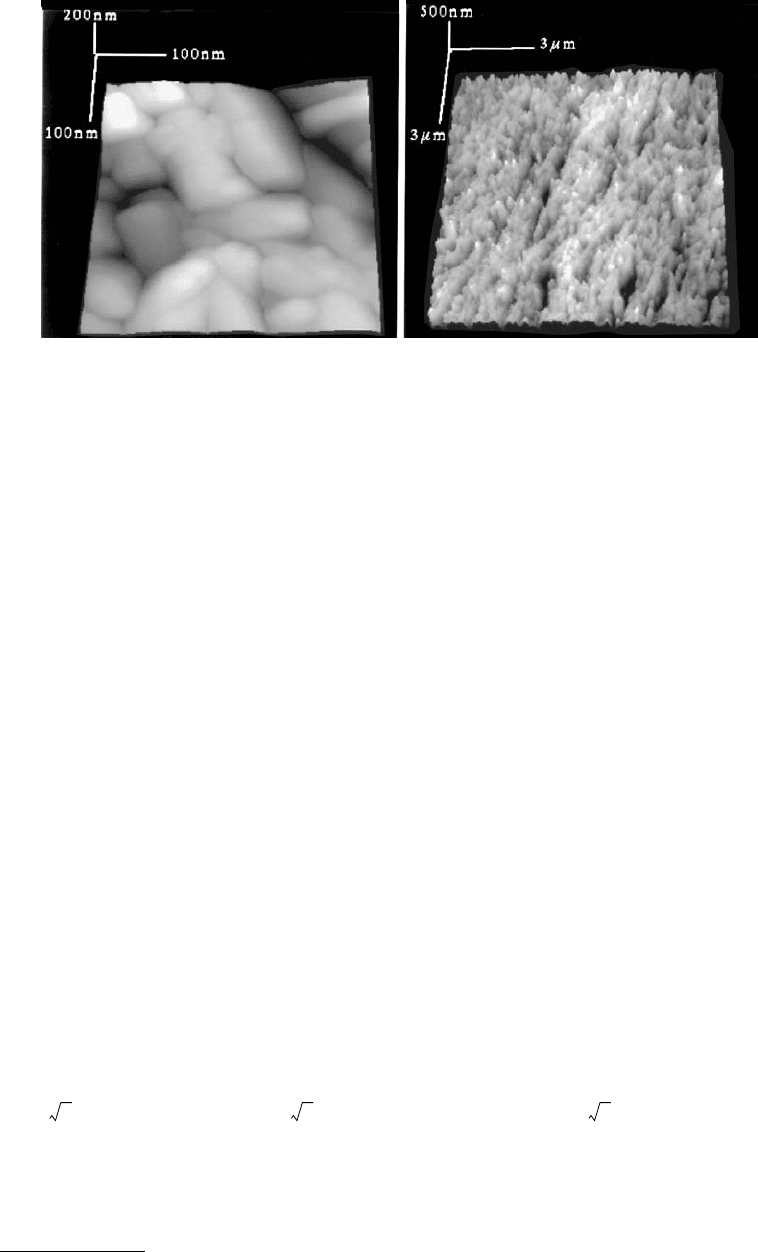
Oden et al. (1992) measured the surface roughness of magnetic tape A (Bhushan et al., 1988) at four
different resolutions by atomic force microscopy. Figure 4.14 shows the image of the tape obtained from
a 0.4 × 0.4 µm scan and 2.5 × 2.5 µm scan. The accicular magnetic particles, typically 0.1 µm in diameter
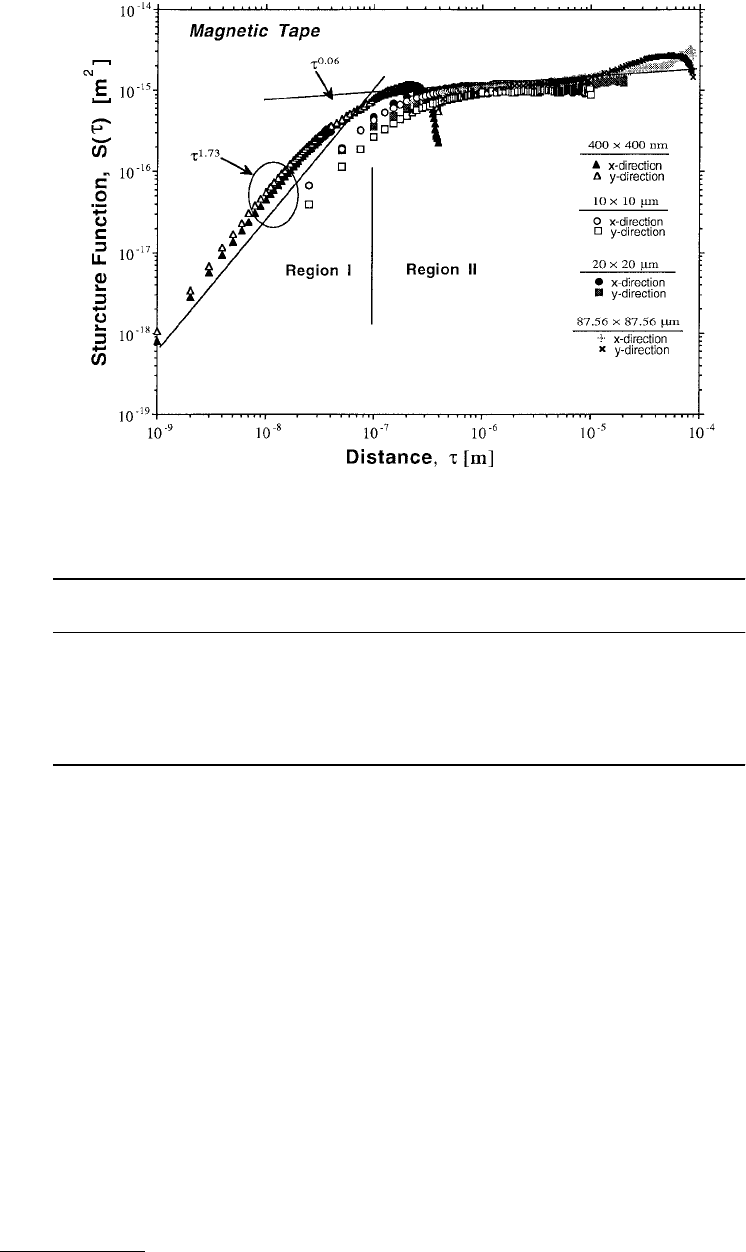
with an aspect ratio of about 10, are clearly visible. Figure 4.15 shows the structure function of all the
four scans, including the two in Figure 4.14 and for 10 × 10 µm and 40 × 40 µm scans. The overlap
between the two structure functions indicates that scan rates did not influence the roughness measure-
ment. The slight anisotropy in the x- and the y-directions correspond to the marginal bias in the
orientation of the magnetic particles along the length of the tape. It is interesting to note that the structure
function has two regions with a knee at around 0.1 µm. This suggests that the behavior S(τ) ~ τ
1.23
for
scales smaller than 0.1 µm correspond to the roughness within a single particle. The S(τ) ~ τ
0
behavior
for larger scales probably arise due to the fact that these particles lie adjacent to each other, much like a
single layer of pencils on a flat surface. Since the diameters of the particles are nearly the same, the height
difference (z(x + τ) – z(x)) remains independent of τ for τ > 0.1 µm. The S(τ) ~ τ
0
behavior corresponds
to a dimension of D = 2 for surface profiles. This, therefore, explains the variation of rms curvature as
σ″ = ω
h
D
∝ β
2
, rms slope as σ′ = ω
h
(D–1)
∝ β
1
; and rms height as σ = L
(2–D)
∝ β
0
in Figure 4.4.
The scale independence of the rms height, and the general behavior of the structure function data of
the magnetic tape, suggests that this surface is a perfect example of the model proposed by Berry and
Blackwell
(1981), given in Equation 4.3.24 — power law behavior of D = 1.39 as τ→0 and a saturation
behavior as τ→∞.
FIGURE 4.14 Images of a magnetic tape A (Bhushan et al., 1988) surface obtained by atomic force microscopy.
Note the magnetic particles, which are oblong in shape with aspect ratio 10 and a diameter of about 100 nm.
C C C
© 1999 by CRC Press LLC
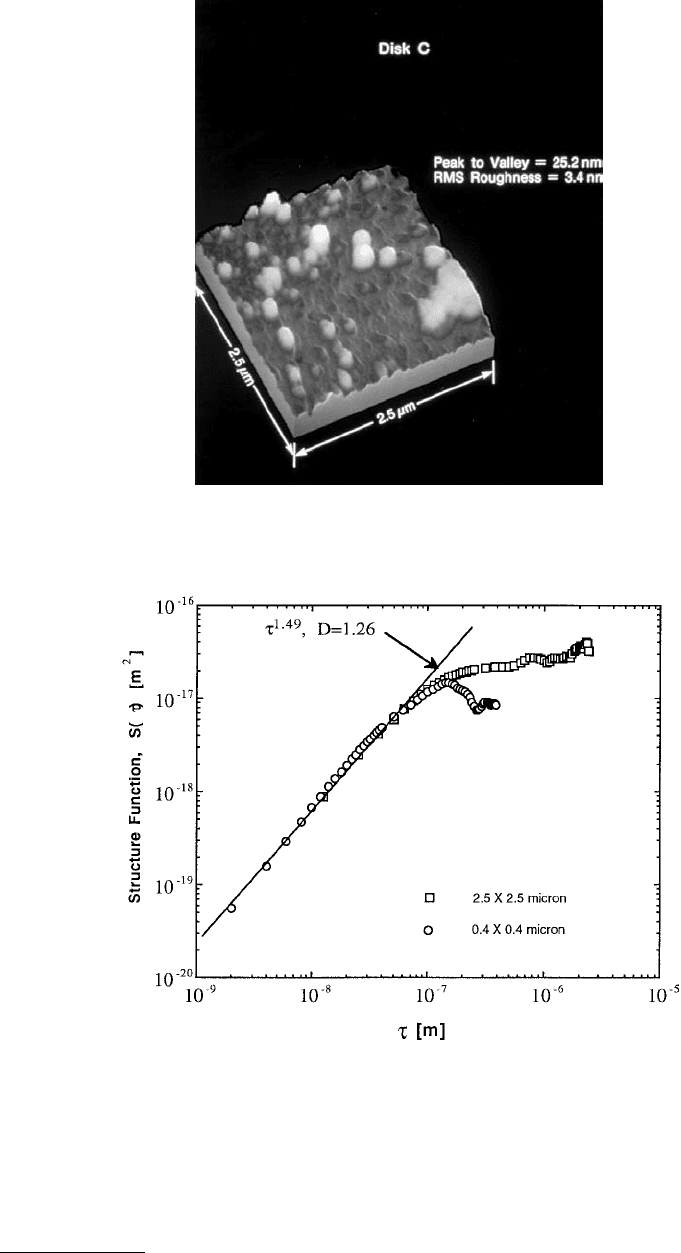
The surface topography of several magnetic thin-film rigid disks was also studied by atomic force
microscopy
(Bhushan and Blackman, 1991). The manufacturing process for these disks are discussed by
Bhushan and Doerner (1989) and are summarized in Table 4.1. Figure 4.16 is an example of an AFM
image of magnetic disk C (Bhushan and Doerner, 1989) for which the surface is composed of columnar
grains of about 0.1 to 0.2 µm width which form during sputter-deposition. Since the substrate was
untextured, the roughness of the films appeared quite isotropic. This is a 2.5 × 2.5 µm image which has
a resolution of 12.5 nm. To check whether or not surface roughness appears at even smaller scales, a
0.4 × 0.4 µm scan, having a resolution of 2 nm, was obtained for the same surface. The structure function
of the surface profiles for both scans revealed that roughness does appear fractal at nanometer scales as
shown in Figure 4.17. The power law behavior of S(τ) ~ τ
1.49
suggests a fractal dimension of D = 1.26
for the surface profiles. The structure function deviates from this power law behavior at about 0.2 µm.
It is interesting to note that this corresponds to the size of the columnar grains that are visible in the
atomic force microscopy image. Therefore, this power law behavior corresponds to intergranular surface
roughness. It is difficult to obtain any meaningful information for larger length scales when τ is compa-
rable to the sample size, L. This is because the number of data points available is not good enough for
statistical averaging required to obtain the structure function.
FIGURE 4.15 Structure function of the magnetic tape A surface.
TABLE 4.1 Construction of the Magnetic Rigid Disks
Disk Designation
Substrate
(Ni–P on Al–Mg) Construction of Magnetic Layer Overcoat
A Polished γ-Fe
2
O
3
particles in epoxy binder Perfluoropolyether (PFPE)
lubricant (liquid)
B Textured Sputtered metal film Sputtered+ PFPE
C Polished Sputtered metal film Sputtered+ PFPE
D Textured Plated metal film Sputtered+ PFPE
E Polished Plated metal film Sputtered+PFPE
From Bhushan, B. and Doerner, M. F. (1989), J. Tribol. 111, 452–458. With permission.
© 1999 by CRC Press LLC
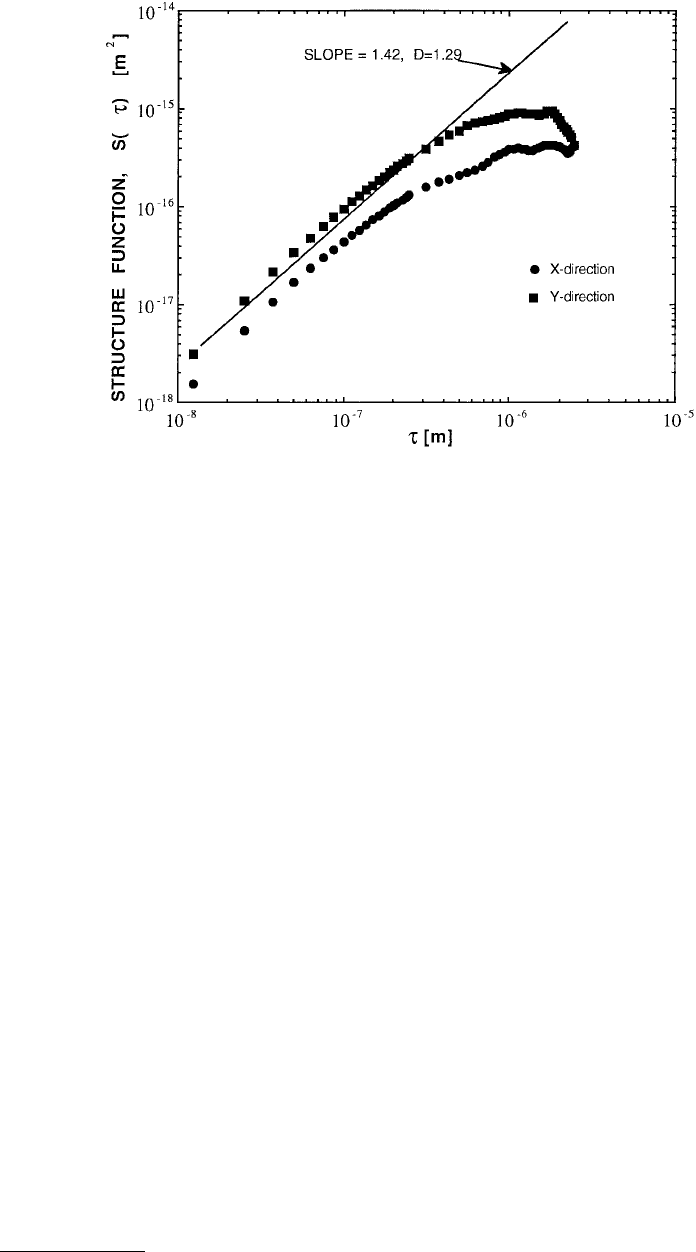
Figure 4.18 shows the structure function for a particulate disk. Note the vertical scale is higher than
that of Figure 4.17, suggesting that the particulate magnetic disk A is much rougher than the sputter-
deposited one. In this case again, the power law behavior at smaller scales suggests a fractal behavior.
Deviations at larger length scale could be due to nonfractal characteristics or lack of statistical average.
FIGURE 4.16 Surface image of magnetic rigid disk C (Bhushan and Doerner, 1989) obtained by atomic force
microscopy (Bhushan and Blackman, 1991).
FIGURE 4.17 Structure function of the magnetic rigid disk C surface.
© 1999 by CRC Press LLC
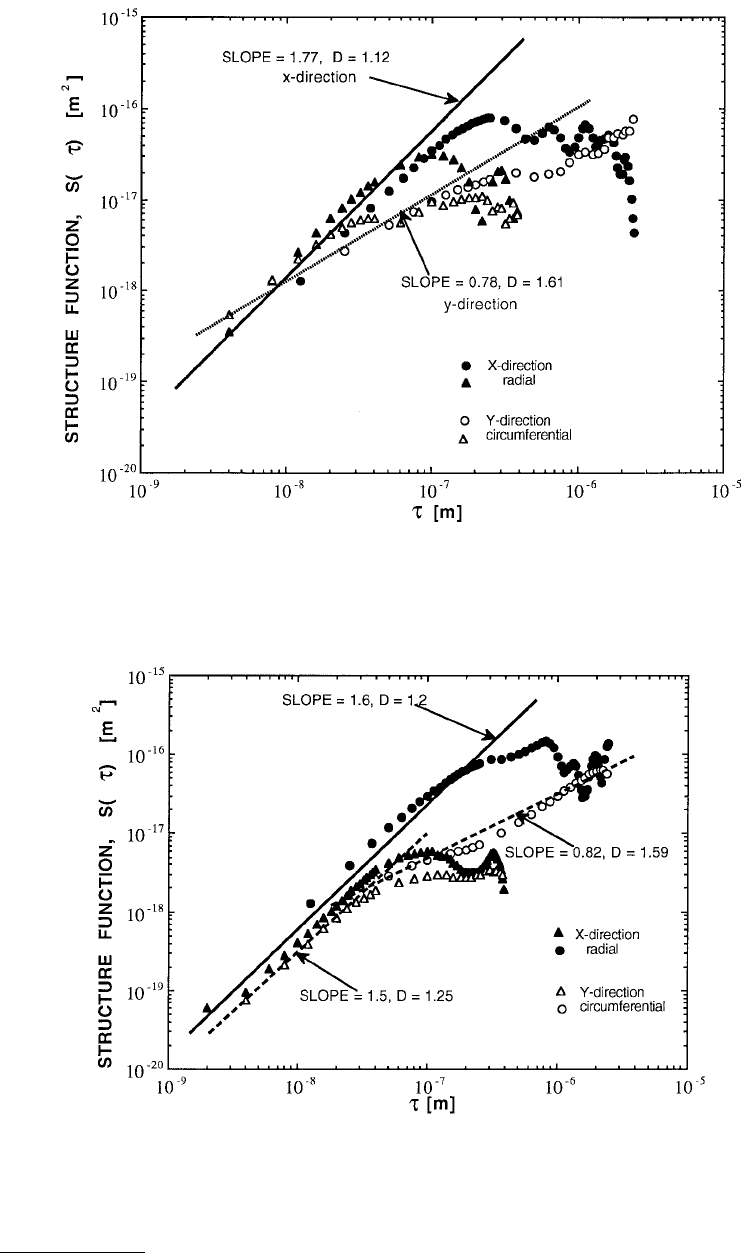
Figure 4.19 shows the structure function for magnetic rigid disk B which is textured in the circumferential
direction. The magnetic thin films were sputter-deposited on the textured substrate. Note the differences
in the structure function in the circumferential and radial directions. The profile in the radial direction
goes across all the quasi-periodic texture marks, which leads to oscillations in the structure function.
Such oscillations cannot be modeled by fractals and must be handled by a more general technique, as
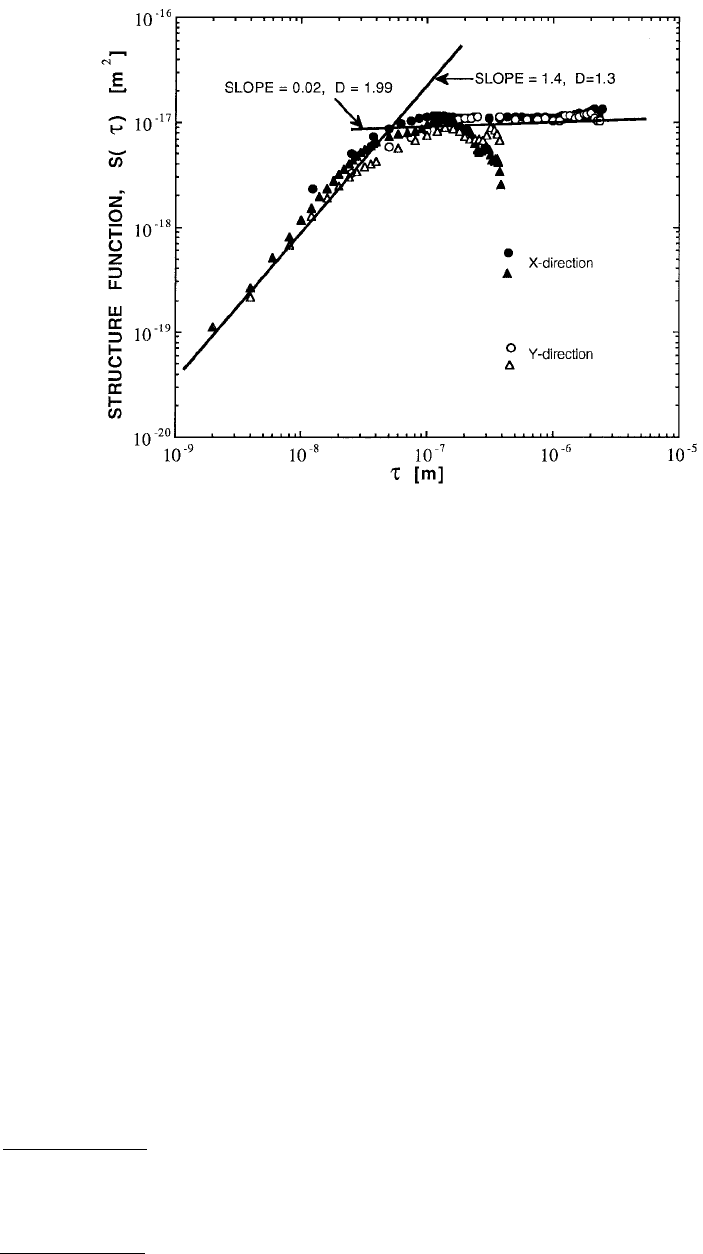
discussed in Section 4.3.4. Figure 4.20 shows the structure function of the textured magnetic rigid disk
D, whereas Figure 4.21 shows that of the untextured rigid disk E. In both these cases the magnetic thin
films were electroless plated on to the substrate. Note that the data levels off for τ > 50 nm, which is
probably a characteristic length scale for the plating process.
It is clear from the structure function data that there normally exists a transition length scale, l
12
,
which demarcates two regimes of power law behavior. At scales smaller than l
12
, the fractal power law
behavior is generally followed for all of the surfaces. At larger length scales, the structure function of the
polished (or untextured) disks either saturates such that the Berry–Blackwell model can be easily applied
or, in some cases, it follows a different power law behavior that can be characterized by another fractal
dimension. If the surface is textured, however, the structure function at larger length scales oscillates and
does not follow a scaling power law behavior. Such nonfractal behavior cannot be characterized by the
fractal techniques and a more general method is needed. This is discussed in detail in Section 4.3.4. The
transition length scale, l
12
, usually corresponds to a surface machining or growth process. For polycrys-
talline surfaces this may be the grain size, whereas for machining it is the characteristic tool size.
Recent experiments by Ganti and Bhushan (1995) showed that when a surface is imaged with atomic
force microscopy and an optical profiler, values of D of a wide variety of surfaces fall in a close range
but the values of G can vary a lot for the same surface. This is in contrast with the data presented above.
However, the check for reliable data is to see whether or not the structure functions of the roughness
measured at different resolutions and by different instruments overlap over common length scales.
Inspection of their data showed that although the structure functions of the atomic force microscopy
measurements of different scan sizes for the same surface seem to overlap over the common length scales,
there was large discrepancy between the structure functions obtained from atomic force microscopy and
optical profiler data. Therefore, it is inconclusive whether the discrepancy is due to the measurement
technique or due to the characterization method.
FIGURE 4.18 Structure function of a particulate magnetic rigid disk A (Bhushan and Doerner, 1989) whose surface
roughness was measured by atomic force microscopy.
© 1999 by CRC Press LLC
FIGURE 4.19 Structure function of magnetic rigid disk B (Bhushan and Doerner, 1989). The magnetic thin films
were sputter-deposited on a textured substrate. The triangles are for a 0.8 × 0.8 µm atomic force microscopy scan
containing 200 × 200 points. The circles are for a 2 × 2 µm atomic force microscopy scan containing 200 × 200 points.
FIGURE 4.20 Structure function of textured magnetic rigid disk D (Bhushan and Doerner, 1989) in which the
magnetic thin films were electroless plated on to the substrate. The triangles are for a 0.4 × 0.4 µm atomic force
microscopy scan containing 200 × 200 points. The circles are for a 2.5 × 2.5 µm atomic force microscopy scan
containing 200 × 200 points.
© 1999 by CRC Press LLC
It is evident that fractal characterization is valid in certain regimes of surface length scales. In these
regimes, the fractal techniques prove to be superior to conventional characterization techniques that use
rms values. It is therefore instructive to understand what the fractal parameters D and G really mean.
4.3.3.4 What Do D and G Really Mean?
Since a rough surface is self-affine, thereby scaling differently in the two orthogonal directions, it needs
two parameters for characterization. These are D and G. At this point, the reader may ask what do a
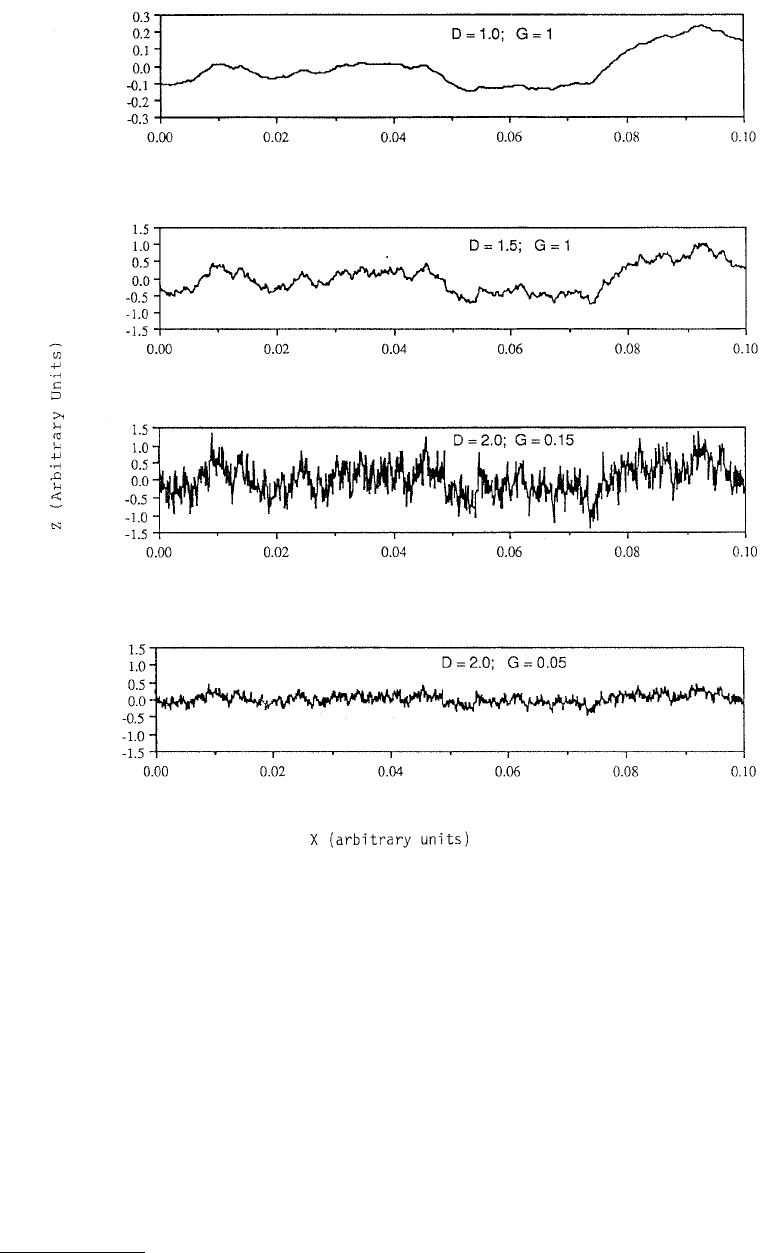
surface profiles look like for different values of D and G. Figure 4.22* shows that when D is close to unity,
the profile is smooth having more amplitude for long wavelength undulations and low amplitude for
short wavelength undulations. As D is increased, the profile gets more wiggly and jagged. When D reaches
close to 2, the profile becomes nearly space filling and therefore more like a surface. Therefore, a decrease
in D effectively stretches the profile along the lateral direction and therefore changes the spatial frequency.
So the value of D controls the relative amplitude of roughness at different length scales. In contrast, an
increase in G stretches the curve in the vertical direction as shown in Figure 4.22. So the value of G
controls the absolute amplitude of the roughness over all length scales.
The concept of roughness and smoothness, as discussed in Section 4.2.1, becomes quite ambiguous
under these conditions. Should a surface with a higher G, and thus more amplitude, be called rougher
or should a surface with higher D, and therefore more jagged, be called rougher? The problem is that
the concepts of rough and smooth are too crude to distinguish between amplitude variations and
frequency variation (or jaggedness) and so it is difficult to say which can be called rougher or smoother.
It could be a combination of both, but at present it is unknown what this combination is.
FIGURE 4.21 Structure function of untextured magnetic rigid disk E (Bhushan and Doerner, 1989) in which the
magnetic thin films were electroless plated on a polished substrate. The triangles are for a 0.4 × 0.4 µm atomic force
microscopy scan containing 200 × 200 points. The circles are for a 2.5 × 2.5 µm atomic force microscopy scan
containing 200 × 200 points.
*These are fractal simulations of rough surfaces obtained by using the Weierstrass–Mandelbrot function. Details
of the simulation procedure is discussed in detail elsewhere
(Voss, 1988; Majumdar and Bhushan, 1990; Majumdar
and Tien, 1990).
© 1999 by CRC Press LLC
4.3.3.5 rms Values and D and G
The rms parameters, σ, σ′, and σ″ have been used extensively in the tribology literature and therefore
researchers are more familiar with them. Although they show scale-dependent characteristics, it is instruc-
tive to know how they relate to fractal characterization parameters D and G. The rms parameters are
related to the power spectrum as shown in Equations 4.3.13 through 4.3.15.
Consider the rms height, σ, first. If σ is scale independent, then the model of Berry and Blackwell
(1981) for the structure function as given in Equation 4.3.24 is valid. In this case, G and D correspond
to the limit of τ→0, whereas σ corresponds to the scales much larger than the correlation length τ
c
. In
other words, the rms height is unrelated to the fractal parameters G and D since the structure function
does not follow the same behavior in the two limits.
FIGURE 4.22 Effect of varying D and G on the profiles of rough surfaces. These are simulations (Majumdar and
Tien, 1990) of rough surfaces obtained from the Weierstrass–Mandelbrot function. The effect of increasing D is to
make the profile more jagged, or in other words, a lateral compression. An increase in G increases the amplitude of
roughness over all length scales.
© 1999 by CRC Press LLC
The scale dependence of the rms height, σ, comes from the fractal power law variation of the power
spectrum as given in Equation 4.3.16. The variance, σ
2
, can be found as
(4.3.25)
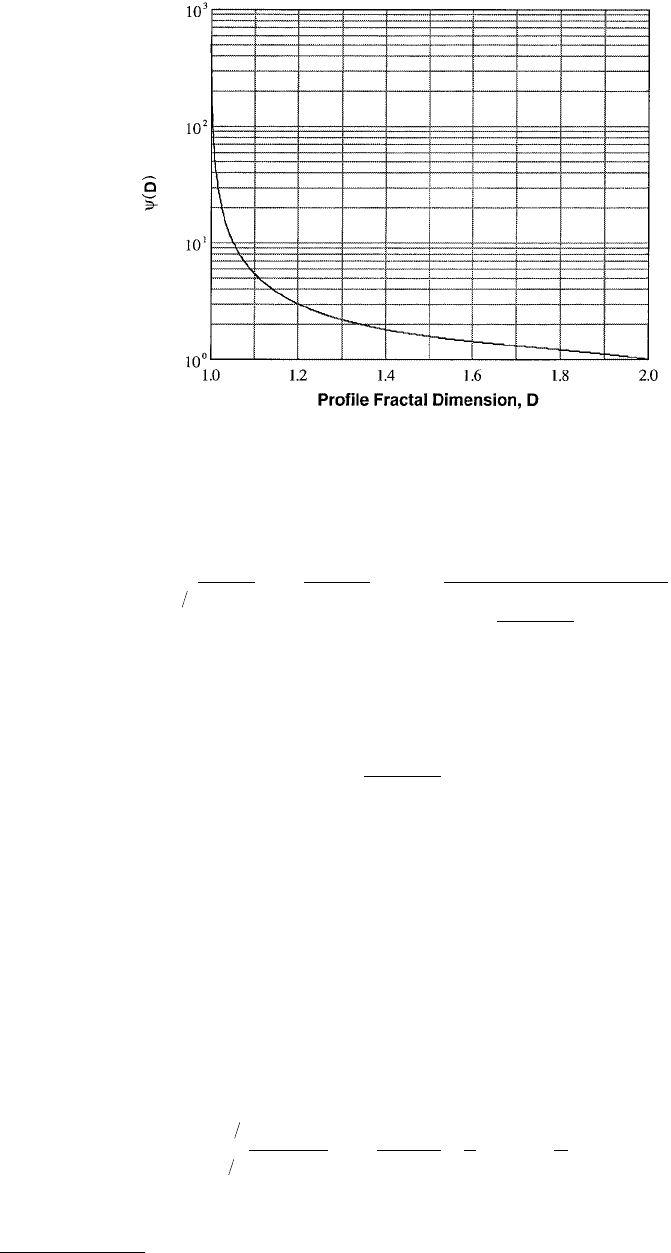
The variation of the factor
with the fractal dimension D is shown in Figure 4.23. As D→1, ψ tends to ∞, whereas when D = 2, the
ψ is equal to unity. It is clear that σ, G, and D are related in a complicated manner. But what is important
is that σ does not depend on the instrument resolution but on the sample length, L. If σ is obtained for
a wide range of varying sample length, L, then the fractal dimension D can be found from the slope of
the log–log plot of σ vs. L. Once the D is found, the factor ψ can be found from Figure 4.23. With D
and ψ known, the scaling constant G can be obtained from the relation in Equation 4.3.25. If the structure
function or the power spectrum follows different power laws in different length scales, Equation 4.3.25
must be modified. This is discussed in Appendix 4.1.
The relation between rms slope, σ′, and the fractal parameters G and D can also be obtained from
the power spectrum as follows:
(4.3.26)
FIGURE 4.23 Variation of the factor ψ(D) with the profile fractal dimension D.
σ
ω
ω
2
52
1
22
2122
22
2
23
2
23
==
−
()
=
π−
()
−
()
−
()
∞
−
()
−
()
−
()
∫
C
d
C
D
L
GL
D
D
D
L
D
DD
sin Γ
ΨΓD
D
D
()
=
π−
()
−
()
sin
23
2
23
′
=
−
()
=
−
()
−
∫
−
()
−
()
σ
ω
ω
2
2
1
1
21 21
52 2 1
11C
D
dw
C
D
L
L
DD
l
l
© 1999 by CRC Press LLC
where l is the smallest length scale that is measured by the instrument. For D > 1 and L l,
Equation 4.3.26 can be simplified to
(4.3.27)
It is clear that the rms slope does not depend on the sample length, L, but on the instrument resolution,
l as σ′ ≈ l
–(D–1)
. For the limiting case, D → 1, we find that ψ(D) → 1/2(D – 1) such that the denominator
in Equation 4.3.27 is equal to unity. For a surface with multifractal regimes, see Appendix 4.1 for the rms
slope.
The rms curvature, σ″, can be found similarly as
(4.3.28)
where it is assumed that L l. It is evident that σ″ ≈ l
–D
such that it depends only on the instrument
resolution and not on the sample length, L.
The autocorrelation function is also often used to characterize rough surface profiles. The relation
between the autocorrelation function and the fractal parameters D and G are given in Appendix 4.2.
4.3.3.6 Asperity Geometry from Fractal Characteristics
One of the advantages of using the fractal roughness characterization and, in particular, the structure
function technique is that the geometric shape of asperities can be described at all length scales in the
fractal regime. Thus, for an asperity that has a base diameter of l, the height of the asperity, δ, follows
from the structure function as
(4.3.29)
Here the diameter l is used as a characteristic length scale such that the area, a, of the asperity base can
be written as, a = l
2
. The geometry is schematically shown in Figure 4.24 for different length scales l. If
the shape is assumed spherical, the radius of curvature, R, for the asperities can be found to follow the
relation
(4.3.30)
Thus the surface can be imagined to be a collection of asperities where small asperities are mounted on
larger asperities that are in turn mounted on larger asperities in a hierarchical manner. Once the geometric
structure is determined, the mechanics of contact and the surface force interactions can be modeled.
FIGURE 4.24 Geometry of an asperity from a fractal surface of
profile dimension D. The asperities are modeled as hemispheres
with radius R and base diameter, l, such that the base area is equal
to a = l
2
.
′
=
−
()
−
()()
−
()
σ
2
21
2
21
D
DD
G
D
Ψ
l
′′
==
−
≈
−
()
()
−
()
∫
σ
ω
ω
ω
2
4
52
1
1
22
2
2
2
11
2
2
C
d
C
DL
D
DDG
G
D
L
DD D
l
ll
Ψ
δ= =
−
()
−
()
−
()
−
()
GGa
DDDD12 12 2
l
R
G
a
G
D
D
D
D
==
−
()
−
()
l
1
2
1
© 1999 by CRC Press LLC
4.3.4 Generalized Technique for Fractal and Nonfractal Surfaces
The fractal characterization techniques, discussed in detail in Section 4.3.3, overcome some of the short-
comings of conventional methods that use σ, σ′, and σ″. One of the requirements of the fractal technique
is that the structure function or the power spectrum must follow power law scaling behavior, that is,
S(τ) ≈ τ
2(2–D)
or P(ω) ≈ ω
–(5–2D)
. If this is satisfied, then the asperity height, δ, and the base size, l, follow
the scaling relation δ ≈ l
(2–D)
. This is particularly useful in tribology since only two parameters, G and
D, need to be known to study tribological phenomena at all length scales in the fractal regime. However,
the experimental data in Figures 4.13 and 4.15 through 4.21 show that although the scaling behavior is
followed in some cases, it is not universal. In addition, the power law can change at a transition length
scale and is not universal over all length scales. Yet, the rms slope and curvature cannot be used to
characterize them since the surface can have multiple scales, which, although they do not follow the
scaling behavior δ ≈ l
(2–D)
, can lead to scale-dependent rms values. A technique must therefore be
developed that will work for both fractal and nonfractal surfaces and yet be scale independent. This
section introduces a new method with these issues in mind.
It is necessary to identify first how the surface characteristics will be used. As discussed in Section 4.2,
knowledge of the surface structure is important for predicting the size and spatial distributions of contact
spots as well as for the mechanics of asperity sliding. Since these spots are formed by asperities, what is
important is the asperity geometry at relevant length scales and its size and spatial distributions on the
surface. The conventional techniques, which use rms height, slope and curvature, find an average asperity
shape, whereas the fractal techniques determine the shape at all length scales by the scaling law. Both
techniques can be combined to form a general method for roughness characterization as follows.
The roughness is characterized by two parameters — V(l) and K(l) — which are found in the x- and
y-directions* by the following relations.
(4.3.31)
(4.3.32)
Here the 〈〉 symbol implies averaging over the measured data points. It is evident that the function
V(l) is the square root of the structure function S(l). For a fractal surface V(l) = G
(D–1)
l
(2–D)
. The function
K(l) is the rms curvature of asperities of lateral scale l which in the fractal model is assumed to vary as
K(l) = G
(D–1)
/l
D
. In the generalized model, such power laws will not be assumed and instead the raw data
*The x- and y-directions are chosen to be the principal directions of an anisotropic surface. The principal directions
can be found by first obtaining V in all directions to get a V vs. l surface. If one takes a horizontal cut of the surface
for V = constant, then one can connect the loci of the intersecting l values into a curve which in general can be
approximated by an ellipse. Then the x- and the y-directions correspond to the major and the minor axes of the
ellipse. The assumption made in this model is that the major and minor axes remain the same at all length scales.
Vzxyzxy
Vzxyzxy
x
y
ll
ll
()
=+
()
−
()
[]
()
=+
()
−
()
[]
,,
,,
2
2
K
zx y zx y
K
zx y zx y zx y
x
y
l
ll
l
l
ll
l
()
=
+
()
+−
()
[]
()
=
+
()
+−
()
−
()
[]
,,
,, ,
2
2
2
2
2