Bhushan B. Handbook of Micro/Nano Tribology, Second Edition
Подождите немного. Документ загружается.

© 1999 by CRC Press LLC
the model described here for a hexagonal lattice can be generalized to a surface of arbitrary symmetry.
A more elaborate model will be presented in Section 6.4.3.4.
6.3.1.3 SFFM in Ultrahigh Vacuum
In air, adhesive forces are mainly due to the liquid meniscus which condenses around the tip–sample
contact. Because adsorbed water is always present under ambient conditions, the tip–sample contact is
not a well-defined system. Therefore, although experiments in air are generally much more relevant to
technical problems, experiments performed in ultrahigh vacuum (UHV) are easier to understand and
interpret from a fundamental point of view. Also, most theoretical models on atomic-scale friction assume
a tip–sample contact under UHV conditions, again because this is conceptually the simplest system. This
explains the great efforts being made to set up SFFM in UHV.
The first observation of atomic-scale friction in UHV is due to German et al. (1993), who chose
hydrogen-terminated diamond (100) and (111) surfaces as a sample and a diamond tip grown by chemical
vapor deposition (CVD) on the end of a tungsten cantilever. The tip–sample contact was therefore the
hardest possible contact that can be made with known materials. Moreover, the passivated diamond
surface was extremely inert, and, finally, the surface was a nonlayered material in contrast to many other
samples commonly used in SFFM, such as mica, HOPG, or MoS
2
. The system chosen by the authors
therefore seems ideal to study wearless friction on an atomic scale.
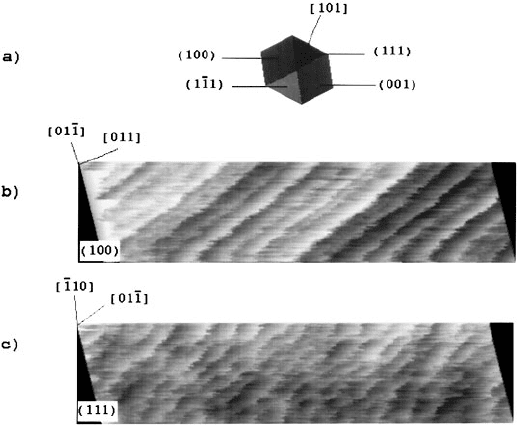
Figure 6.16 shows two images of the friction force corresponding to the (100) and the (111) surface
taken at an estimated loading force of 15 nN. Both images show stick-slip-like variations of the lateral
force with a periodicity of atomic dimensions. While the variation in the first image was reported to be
consistent with a known 2 × 1 reconstruction of the diamond surface (Figure 6.16b), the second image
bears no clear relation to the corresponding lattice (Figure 6.16c). The normal force which was acquired
simultaneously did not show any structure within the resolution limit (0.07 nm peak to peak noise). In
addition to the friction force, the interaction of tip and sample was studied as a function of distance.
The corresponding force vs. distance showed very little hysteresis, an adhesive force of about 8 nN and
a distance dependence in accordance with a pure van der Waals interaction of tip and sample assuming
a tip radius of 30 nm. This was also the radius of curvature which the authors estimated from scanning
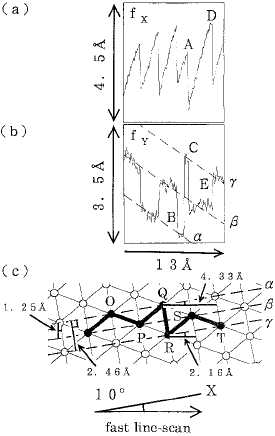
FIGURE 6.15 Friction signals for scan lines where the crystal axes are not aligned with respect to the axes of the
cantilever. In this case, the tilting angle was 10
°. The corresponding motion is more complex than in the previous
cases. (From Morita, S. et al. (1996), Surf. Sci. Rep. 23, 1–41. With permission.)
© 1999 by CRC Press LLC
electron microscopy images. In this experiment, the tip–sample contact was much better defined than
in the previously discussed experiments. Assuming that the Hertz theory is still valid at this small scale,
a contact radius of about 1 nm can be estimated, indicating that most probably the contact was not
through a single atom, but was at least of near atomic dimensions.
Another important observation in these experiments is that the friction did not increase linearly with
load. Instead, it first increased rather sharply and then remained approximately constant so that the
“differential friction coefficient” was essentially zero. For the range of forces measured, and given the low
precision of the experimental data, we believe that this result is consistent with recent experiments which
show that friction is essentially proportional to the contact area (see Section 6.3.3).
A series of experiments performed explicitly to study the resolution of SFM and SFFM have been made
by Howald et al. (1994a,b, 1995). In their first work, the (001) surface of NaF was imaged at room
temperature under UHV conditions. The crystal was cleaved in UHV and examined by low-energy
electron diffraction to ensure its correct orientation and a structurally good cleavage face. The measured
diffraction patterns were found to agree with the cubic cell mesh of the unreconstructed (001) surface.
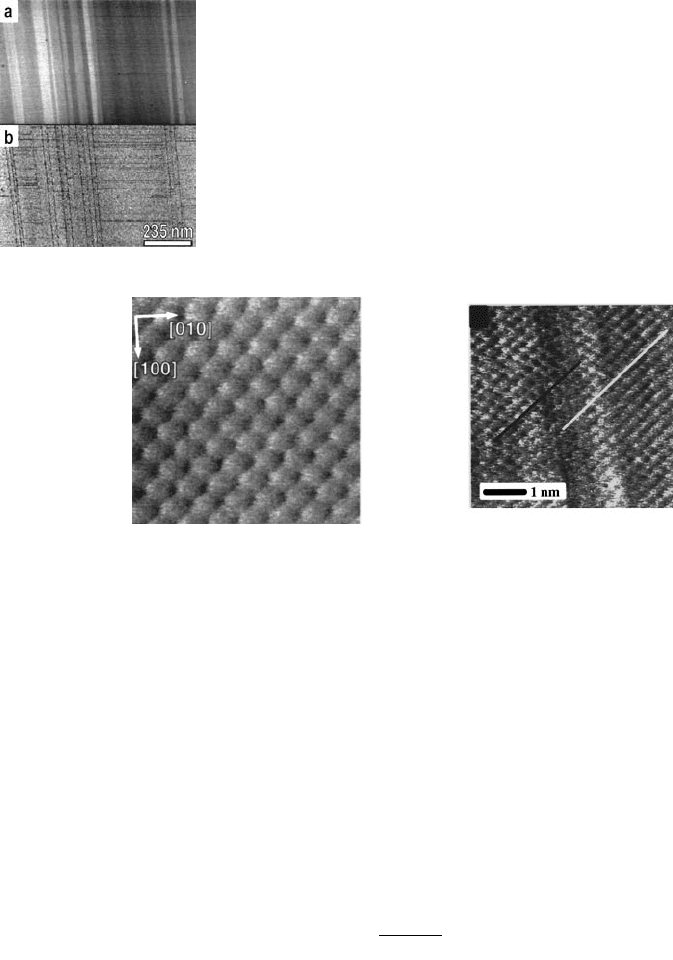
Figures 6.17a and b show large-scale images of the surface as seen by SFFM. Different cleavage steps are
visible, most clearly in the topographic image. Their height as measured by SFFM were 0.25 and 0.5 nm,
which was in good agreement with the expected value of 0.23 nm for a monatomic step. The lateral force
image showed an increase when the tip moved up a step. Similar behavior has also been found by other
groups, and under different conditions, as, for example, in an electrochemical cell (Weilandt et al., 1997),
and is still not understood in detail. Processes at steps are complex, since a variety of parameters such
as contact area and the normal force may vary. Moreover, atoms at steps have a different coordination
number than on terraces, which in turn might lead to different chemical and physical behavior. Step
edges such as those seen in Figure 6.17 are, however, an ideal structure to test resolution on an atomic
scale. On the one hand, a step edge is an extended object which is easily resolved by SFFM, in contrast
to a single point defect. On the other hand, due to the discrete structure of the lattice, it represents a
well-defined structure of known atomic dimensions. Usually, it is assumed that the tip images the surface.
FIGURE 6.16 (a) Schematic view of the diamond tip, seen as if looking through the tip along the surface normal.
This view is aligned correctly with respect to the two lateral force images shown below. (b) Lateral force image of a
hydrogen-terminated diamond (100) surface. (c) Lateral force image of a hydrogen-terminated diamond (111)
surface. For both images, the scan size is 5.8
× 1.25 nm. The gray scale of the lateral force images corresponds to a
total variation of 11 nN, and the loading force is about 15 nN. (From Germann, G. J. et al. (1993), J. Appl. Phys. 73,
163–167. With permission).
© 1999 by CRC Press LLC
This, however, is not always correct. Quite generally, in SFM and SFFM the sharper object essentially
images the blunter one. The tip only images the surface if the radius of curvature of the tip is much
smaller than the radius of curvature of the sample features. At an atomic step on the sample, however,
the step is usually sharper than the tip; therefore, the surface is imaging the tip. From a simple geometric
analysis, the relation
between the radius R, measured step width S, and known step height H is obtained.
Figure 6.18 shows high-resolution lateral force images. The left image was taken on a flat terrace and
the right image at a monoatomic step. The loading force was about 5 nN. The periodicity of both images
was measured to be 0.45 nm, which corresponds well with the length of the unit cell. This implies that
only one species of the ions within the unit cell were imaged. Similar results have been also observed
with SFM in UHV for ionic crystals, such as NaCl (Meyer and Amer, 1990a), LiF (Meyer, 1991b), and
AgBr (Haefke et al., 1992), while in the case of KBr both kinds of ions have been resolved (Giessibl and
Binnig, 1992). As in the experiments with diamond on diamond described above, simultaneously with
the lateral force an image of the normal force was acquired, but showed no resolution within the noise
level of the instrument. The reason for this is not well understood.
FIGURE 6.17 Large-scale images of the NaF(001) surface taken under UHV
conditions with an SFFM in contact mode. Image (a) shows the topography of
the surface and image (b) the corresponding lateral force. (From Howald, L. et al.
(1994), Phys. Rev. B 49, 5651–5656. With permission.)
FIGURE 6.18 High-resolution lateral force images of the NaF(001) surface. The left image was taken on a flat
terrace; the total scan size is about 3 nm. The right image was taken at a monatomic step with an approximate loading
force of 5 nN and the total scan size is about 5.6 nm. The white and black lines in the right image serve as guidelines
to show that the lattices in the left and right part of this image are shifted by half a lattice constant. This shift, as well
as the vertical stripes in this image is caused by a monatomic step which is not atomically resolved due to the extension
of the contact area. The lattice periodicity is not resolved in the middle of the image. The corresponding diffuse
region of about 1 nm width is a measure of the contact radius. The periodicity of both images is measured to be
0.45 nm. (From Howald, L. et al. (1994), Phys. Rev. B 49, 5651–5656. With permission.)
R
SH
H
=
+
22
2
© 1999 by CRC Press LLC
In the right image in Figure 6.18, at first sight no clear evidence for a step is seen. The most evident
features are vertical stripes, which look like noise. However, these stripes are aligned parallel to the step
edges and were not seen on flat terraces (see the left image in Figure 6.18). Analyzing this image in more
detail it can be observed that the center of the image shows a diffuse region without clear periodicity.
Moreover, the periodicity of the lattice corresponding to the upper and lower terrace is shifted by half a
lattice constant. This is exactly what one expects when, as described above, the tip images only one species
of ions. In a cubic lattice of the NaCl type, two atomic layers corresponds to one lattice spacing. Therefore,
the positions of ions which are alike are shifted by half a lattice constant in the layer below and are again
in the same position two layers below. On a monatomic step, the layer below is seen as the lower terrace;
therefore, if only one sort of ions is resolved, a shift of the atomic periodicity has to be observed, as in
fact is the case. From the image discussed the important consequence is drawn that in this case, which
we think is representative for all SFFM images taken up to the present date, the resolution is lower than
the periodicity seen. Taking the width of the diffuse region corresponding to the step as an estimate for
resolution, one finds a value of about 1 nm, which is consistent with the contact radius that one would
expect for a tip of 10 nm radius (see below) on a ionic crystal at the reported loading force of 5 nN.
From the topographic image at this monatomic step (not shown) a width of about 2 nm is measured,
and the corresponding radius of curvature is calculated to be 8 nm. However, higher steps give values
for the tip radius which are considerably larger: on a biatomic step the width was 6 nm and R = 40 nm.
This implies that on a larger scale, the tip is considerably larger, which in turn seems very reasonable.
Summarizing, this study proves that the resolution of an SFFM tip in contact with the sample is lower
than the periodicity seen and of the order of 1 nm or more, even under UHV conditions. Again, it is
interesting to observe that while an atomic periodicity is seen in the lateral force image, the periodicity
in the normal force is not resolved. This is rather surprising, since a simple hard sphere model predicts
signals of similar structure as well as magnitude for the lateral force and the normal force.
Another important study dealing with friction on an atomic scale is again due to Howald et al. (1994b,
1995). In this study the Si(111) 7 × 7 surface was investigated by SFFM. This surface is well known from
scanning tunneling microscopy (STM) experiments and has a very characteristic structure. Moreover,
height differences are much more pronounced than on other surfaces, due to the complex surface
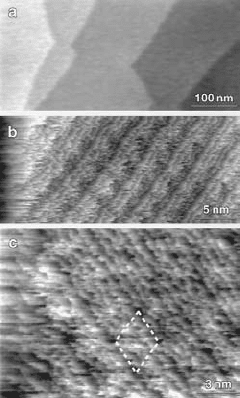
reconstruction. In the noncontact mode (see discussion below) the authors achieved large-scale images
resolving individual steps; atomic resolution, however, was not obtained (Figure 6.19a). In the contact
regime, on the other hand, the surface was severely damaged. This is reasonable taking into account the
high reactivity of the surface due to the dangling bonds. Under UHV conditions, where contamination
FIGURE 6.19 (a) Large-scale topographic image taken in noncontact
mode of the Si(111) 7
× 7 surface. Images (b) and (c): high-resolution lateral
force images taken in contact mode which show the periodicity and some
internal structure of the Si(111) 7
× 7 lattice. (From Howald, L. et al. (1994),
Phys. Rev. B 49, 5651–5656. With permission.)
© 1999 by CRC Press LLC
layers which passivate the surfaces are absent, one might expect a silicon tip on a silicon surface to simply
weld together to form a nanocontact. Tip and surface atoms will merge and lose memory of where they
came from. This simple view is in fact supported by molecular dynamics simulation of a silicon tip on
the Si(111) 7 × 7 surface (Landman et al., 1989a,b). These simulations also predict nanoneck formation
for other tip–sample systems, in particular for metal–metal contacts (Landmann et al., 1990). If nanoneck
formation occurs, atomic-scale friction is not only limited to the tip–sample interface, which is not well
defined any more, but to atomic rearrangement which can happen within the whole nanoneck. These
processes are discussed in detail in Chapter 11 by Harrison et al.
To avoid welding of tip and sample Howald et al. (1995) covered the tip with PTFE (Teflon). This
covering was obtained by imaging a PTFE surface prior to the experiments on silicon. It is known that
this procedure results in the transfer of PTFE onto the tip, to which it adheres as a thin film (Wittmann
and Smith, 1991). Other evaporated coverings such as Pt, Au, Ag, Cr, and Pt/C were reported to offer
no improvement as compared with untreated tips. With the PTFE-covered tips, adhesion as well as
friction were reduced significantly. The maximum adhesive forces were of the order of 10 nN. Under
best conditions, the atomic periodicity of the Si(111) 7 × 7 surface could be resolved and the typical
stick-slip behavior of the lateral force was observed. The images shown in Figure 6.19b and c were taken
at an approximate loading force of 10 nN, and the total lateral force is 50 nN, whereas its variation due
to the stick-slip motion is about 10 nN.
This study shows the importance of the chemical nature of the tip and of the tip–sample contact and
that in reactive systems a thin passivating film is needed to avoid welding of tip and sample.
6.3.1.4 Atomic Resolution in SFM and SFFM
It is important to note that while “true” atomic resolution is quite difficult in SFM and SFFM, it is
standard in the case of STM in vacuum. In the case of SFM, “true” atomic resolution is much more
difficult, but has been achieved in UHV by several groups using STM detection (Giessibl and Binnig,
1992), high-amplitude modulation techniques (Sugawara et al., 1995; Giessibl, 1995), as well as with low-
amplitude modulation and careful tuning of the tip–sample interaction. True atomic resolution has also
been observed in liquids, again with careful adjustment of the tip–sample interaction (Ohnesorge and
Binnig, 1993). The main reason for this difficulty in SFM as compared to STM is twofold. On the one
hand, the tunneling current decreases much faster than typical surface forces. Since the lateral resolution
in any scanning probe microscope depends not only on the tip radius, but also on the decay length of
the interaction used for imaging, this implies a higher resolution for an STM as compared with SFM or
SFFM. On the other hand, an STM tip is usually a very stiff system and can therefore be positioned at
(almost) any tip–sample distance. An SFM, however, needs a soft cantilever to convert forces into
displacements which can then be measured. In consequence, instabilities occur and the tip can usually
not be positioned easily very close to the sample, which is the region needed for high-resolution imaging.
These two factors essentially explain the difficulty in obtaining true atomic resolution in SFM and SFFM.
One approach to achieve true atomic resolution in SFM and SFFM, therefore, seems to be to use stiff
cantilevers and to start from STM techniques. In a certain respect, this approach is contrary to that
described in this chapter up to this point. The experiments described above were performed in the contact
regime, and the goal was to decrease the normal force and thus interaction as much as possible. The
approach to be described now starts from the tunneling regime with essentially no interaction and tries
to increase interaction to measure normal forces and possibly lateral forces. As we will see, imaging of
normal force with true atomic resolution has been achieved, but not the corresponding imaging of lateral
forces.
Mostly, in the “almost contact regime” the force is not measured directly, but through the force gradient.
The force gradient is measured by detecting a small shift in resonance frequency of the tip–sample system.
The measurement of the force gradient is much more convenient for a variety of reasons. First, resonant
techniques can be applied which result in an increased resolution. Second, since the snapping of the
cantilever has to be avoided, stiff cantilevers have to be used. Therefore, the resolution in direct force
measurements is low (since ∆F
noise
= C·∆z
noise
/c, where c is the force constant of the cantilever), while the
© 1999 by CRC Press LLC
resolution measuring the force gradient is less strongly affected. And finally, the force gradient has a
stronger variation near the surface than the force itself: if F(z) ∝ 1/z
n
, then F' (z) ∝ 1/z
n+1
. Moreover,
long-range force components such as van der Waals forces or electrostatic forces are in a sense low-pass
filtered if the force gradient is measured, so that essentially only the short-range interaction is detected.
The first measurement of forces in scanning probe microscopy is due to Dürig et al. (1986), who measured
how the spectrum of thermal noise changes as an STM tip approaches a conducting surface. Dürig et al.
(1988, 1990) also measured how the tunneling current I and the force gradient F
n
vary with the tip–sample
distance. A simple relation between tunneling current and force was proposed by Chen (1991):
(6.9)
This relation essentially holds because, within perturbation theory, the tunneling current is proportional
to the matrix element between the electronic wave functions |
T 〉 and |s/> of the tip and sample,
respectively: I (z) ∝/< ·
T (z)| H
int
|s (z)〉, where H
int
is the interaction Hamiltonian (Tersoff, 1990).
Since this matrix element can be interpreted in terms of an interaction energy between tip and sample,
one finds Equation 6.9 by differentiation. This equation establishes a relation between STM and SFM
experiments and shows that essentially the same physical quantity is measured with these different
instruments. Note, however, that Equation 6.9 is only correct within perturbation theory when tip and
sample are far away (for STM standards) and therefore only in weak interaction. For strong interaction,
that is, in the “near contact” regime, substantial electronic rearrangement and a lowering of the work
function occurs and correspondingly perturbation theory fails. This is the interesting regime for com-
bined STM and SFM experiments: since the tunneling current and the forces are not easily related, they
can be assumed to be complementary magnitudes.
A detailed analysis of the physics of combined tunneling and force gradient measurements is due to
Dürig et al. (1992). Essentially the proposed technique is to monitor the tunneling current while a very
small oscillation is applied to the tip. It is important to keep this oscillation smaller than the typical length
scale on which the surface forces vary; otherwise, the interaction is averaged over the distance which the
tip moves during oscillation. This oscillation appears in the tunneling current and can be analyzed by
appropriate frequency modulation (FM) techniques (Albrecht et al., 1991, Dürig et al., 1992). With this
measurement technique, two quantities are measured simultaneously, the tunneling current which can be
compared to other STM experiments and the force gradient as an additional source of information.
This method has been applied successfully to obtain true atomic resolution of the variation of the
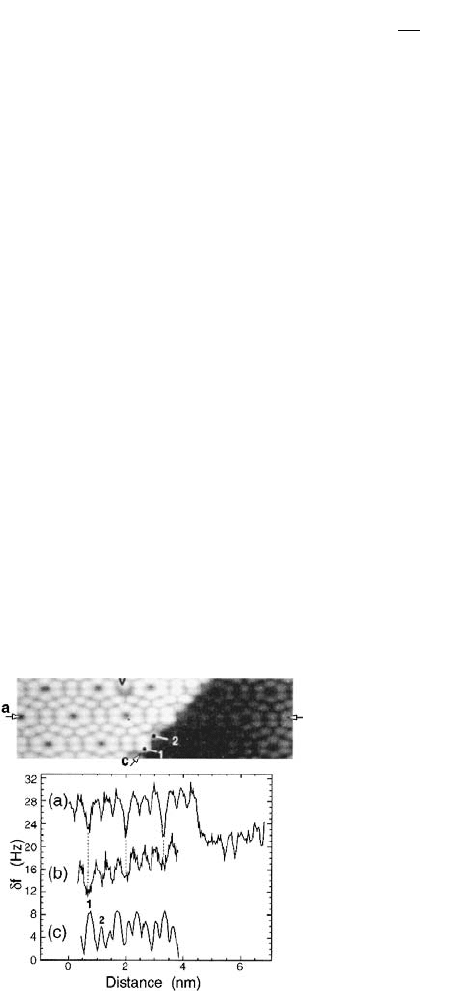
normal force on the Si(111) 7 × 7 surface (Lüthi, 1996). This is seen in Figure 6.20, and it is evident from
the resolved step and the defect that the resolution is “true” in the sense discussed above. The image shown
corresponds to a variation of the resonance frequency of +2 Hz over the adatom sites and of –6 Hz over
FIGURE 6.20 True atomic resolution image of the Si(111) 7 × 7
surface taken with dynamic force microscopy. The upper image
corresponds to the frequency shift of the tip–sample system as the
average tunneling current was kept constant at 25 pA. Note the
defect in the upper part of the image at the position marked with
the V which demonstrates that the atomic resolution is indeed true.
The lower graph shows line profiles of the measured frequency shift.
The upper profile (a) in this graph corresponds to a horizontal line
at the position a in the image and was recorded (presumably) with
a one-atom tip, while profile (b) results from a multiatom tip.
Profile (c) corresponds to the frequency along the step (marked
with the lower arrow and the positions c, 1, 2 in the image). (From
Lüthi, R. et al. (1996), Z. Phys. B 100, 165–167. With permission.)
Fz
dI
dz
z
n
()
∝
()
.
© 1999 by CRC Press LLC
the corner holes. The mean tunneling current was 25 pA which caused a total frequency shift of approx-
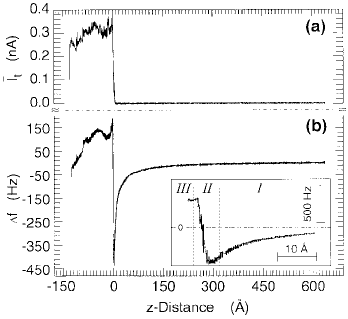
imately –70 Hz. This kind of image is only possible after careful tuning of the interaction parameters. This
is illustrated in Figure 6.21 which shows the simultaneous recording of the average tip current as well as
the frequency shift vs. the tip–sample distance. The inset corresponds to an expansion of the critical region
which shows approximately the last three nanometers before contact. Three regions can be distinguished
as the tip approaches the sample. First, a long-range attractive region due to van der Waals and electrostatic
interaction. This regime is suitable for noncontact measurements, but atomic resolution is not obtained
since the tip is too far to detect the atomic corrugation. The second regime starts with the appearance of
tunneling current. This is the regime of typical STM operation. Within this regime, the slope of the
frequency shift changes, which has to be taken into account if feedback is performed on this signal. In this
region, stable atomic resolution force (gradient) microscopy is possible. As the tip approaches further, the
frequency shift becomes zero and even positive, due to repulsive interaction. This is the third region. The
point of zero frequency shift corresponds to the maximum adhesive force, and therefore to a point of
strong short-range interaction. As the tip approaches even further, a point of vanishing force is reached
with positive force gradient. At this point the tip–sample system can be interpreted as being chemically
bound at its equilibrium position. Finally, when not only the force gradient, but also the force itself is
positive, a true mechanical contact has been made between tip and sample. In this region, only lattice
periodicity is resolved, but no true atomic resolution is possible because of the extended radius of the
tip–sample contact. As discussed above, in the case of reactive tip–sample configurations, tip and sample
will weld together and very strong mechanical interaction will occur.
Up to now, lateral forces have only been measured in this true contact regime. For a detailed under-
standing of the atomic processes governing friction it would be of great importance to operate the SFFM
if possible also in the second regime corresponding to strong tip–sample interaction but not to real
mechanical contact. Hopefully, the experimental problems can be solved and this will be achieved in the
near future.
6.3.2 Thin Films and Boundary Lubrication
The previous sections have dealt mainly with atomic-scale resolution in the direction parallel to the
surface. However, SFM and SFFM also have an extreme resolution in the direction perpendicular to the
surface. SFFM can therefore in principle also image what is “on top” of the surface and investigate how
the properties of the surface are modified by adsorbents and thin films. The term thin films applies in
FIGURE 6.21 Simultaneously recorded traces of the time-averaged tunneling current I
t
(a) and of the frequency
shift δν (b) taken as the tip approaches the Si(111) 7
× 7 surface. The onset of the tunneling current is shifted slightly
to the left of the maximum negative frequency shift δν. Inset: the frequency shift on an expanded scale corresponding
to the last few nanometers. (From Lüthi, R. et al. (1996), Z. Phys. B 100, 165–167. With permission.)
© 1999 by CRC Press LLC
the present section usually to coverings merely one or two monolayers thick and therefore to “really thin
films.” In the context of tribology, the question of how these very thin films can modify the tribological
properties of surfaces leads to the important and vast topic of boundary lubrication, a field of great
interest due to its evident technological applications. Accordingly, a lot of research has been made in this
field, recently also with SFFM techniques. A detailed analysis of this field is beyond the scope of this
section. For details see, for example, reviews by Bhushan et al. (1995), Fujihira (1997), and Carpick and
Salmeron (1997). We will only attempt to show how SFFM can contribute to this field.
6.3.2.1 Adsorbed Liquid Films
The most widely used lubricant is probably water in the form of a thin liquid film which adsorbs on
most surfaces. This film chemically passivates surfaces and lowers long-range adhesion forces since the
van der Waals interaction is weaker through water than through air or vacuum (Israelachvili, 1992). The
superb imaging performance of SFM and SFFM in the contact mode under ambient conditions is
probably mainly due to the lubricating properties of this adsorbed film. It prevents tip and sample from
welding together into a strong contact. As discussed above, imaging in UHV is generally much more
difficult. On the other hand, the meniscus force seems to increase the adhesion force and, therefore, the
total force exerted on the surface by the tip. Consequently, the contact area and the friction of the
tip–sample system also increase. Similar effects are known from micromechanics (Matthewson and
Marmin, 1988; Legtenberg et al., 1994; Tas et al., 1997) and magnetic tape disk sliders (Mate, 1992; Mate
and Homola, 1997), where stiction due to adhesion caused by meniscus forces is often an important
problem. In ambient conditions the effect of relative humidity in an SFM and SFFM setup is twofold.
On the one hand, a film of thickness (see, for example, Israelachvili, 1992)
(6.10)
with A the Hamaker constant of the tip–sample system, n the number density of the liquid (molecules/m
3
),
kT the thermal energy, and x the relative humidity, condenses on the tip as well as on the sample. On
the other hand, a liquid meniscus of radius (Israelachvili, 1992)
(6.11)
the so-called Kelvin radius, where γ is the surface energy of the liquid (γ
H
2
O
72 mJ/m
2
), can form
around the tip–sample contact. For water in air at room temperature those equations give d 0.1 nm/log
(x)
1/3
and κ 0.5 nm/ln (x). The water meniscus results in an adhesive force whose magnitude is
approximately (Israelachvili, 1992)
(6.12)
where R is the tip radius and ϑ the contact angle of the meniscus with tip and sample. According to this
equation, the adhesion force should not depend on the relative humidity. However, in typical SFM
experiments the adhesion force does seem to depend on the relative humidity (see below). A more-
detailed analysis of tip–sample capillary interaction can be found in Mamur (1993).
In spite of its importance, we think that rather little research has been done on the effect of this liquid
film in SFM and SFFM. Binggeli and Mate (1994) used an SFFM system similar to the one built by
German et al. (1993) to measure adhesion and friction at different humidities. With two fibers normal
d
A
nkT
x
=
π
()
6
1
13
ln
κ
γ
=
()
nkT
x
1
ln
,
FR
men
=π
()
4 γ cos ϑ
© 1999 by CRC Press LLC
and lateral forces could be measured simultaneously. Cantilevers were made by bending tungsten wires
and etching their free end to form a sharp tip of approximately 100-nm radius. Three representative
surfaces were used as samples: SiO
2
(high hydrophilicity, contact angle of approximately 2°), an amor-
phous carbon film (medium hydrophilicity, contact angle of approximately 45°), and a perfluoropolyether
lubricant (Fomblin Z-Dol, low hydrophilicity, contact angle of approximately 90°), which is typically
used as a magnetic disk lubricant. The largest effect of humidity on friction and adhesion was found on
SiO
2
, as might be expected. Essentially, the adhesion force is reduced by approximately a factor of two
on SiO
2
as well as on the carbon surface if the humidity is increased from 75 to 90%. This implies that
Equation 6.12 has to be used with caution in SFM experiments. The friction, on the other hand, is reduced
by the same amount only on the SiO
2
surface, but stays constant on the amorphous carbon film.
Similar results have been obtained for an Si
3
N
4
tip on mica (Hu et al., 1995). In this system, the friction
coefficient decreased by about a factor of two in the range between 7 and 95% relative humidity. The
friction force itself decreased by almost one order of magnitude in this range. Therefore, the lubricant
effect of water in the Si
3
N
4
–mica system seems to be twofold: on the one hand, the absolute friction force
is reduced and, on the other hand, the friction coefficient is lowered.
Experiments to measure the role of humidity on friction and adhesion were also performed by Fuhihira
et al. (1996). In the range between 10 and 60% they found that neither the friction nor the adhesion
depended significantly on the humidity on a hydrophobic surface. On a hydrophilic SiO
2
surface, however,
both friction and adhesion increased by about a factor of two. We note that this result is not in contra-
diction with the experiment of Binggeli and Mate discussed above (they find a decrease of adhesion and
friction at higher humidity), since they cover different humidity ranges. The increase of friction at higher
humidity is explained as a result of a higher adhesion force due to a larger liquid meniscus around tip
and sample. A higher adhesion force implies a large contact area and ultimately a higher friction force
(see Sections 6.3.3 and 6.4.2). Interestingly, the authors propose to use this dependence of friction on
humidity in the case of hydrophilic surfaces to implement a “scanning hydrophilicity microscope”
(Fujihira et al., 1996).
6.3.2.2 Boundary Lubrication
Although adsorbed water on surfaces acts as a lubricant, it is not what is usually understood as a boundary
lubricant. This term is generally used for organic molecules such as Langmuir–Blodgett (LB) films or
self-assembling monolayers which are deliberately deposited on surfaces to improve their tribological
properties, that is, to provide better sliding of the surfaces and reduce wear. Boundary lubricants are
essentially organic molecules with carbon chains and some head group. Typically, boundary lubricants
are amphiphilic molecules. The hydrophobic part consists of a hydrocarbon chain with approximately
10 to 30 methylene groups. Alternatively, fluorinated carbon chains are used. The hydrophilic part consists
of a polar end group, such as a carboxylic acid head group. The end group can form strong ionic bonds
with metal ions. Dissolved in water, in the form of fatty acids or as metallic soaps, the molecules form
aggregates with the hydrophilic part exposed to water. With the LB technique, the molecules can be
assembled as two-dimensional aggregates and molecular layers are transferred to a substrate. Alternatively,
self-assembly techniques can be used where the film is directly grown at the liquid–solid interface.
Due to this structure, boundary lubricants can be synthesized in an almost infinite variety: the chain
length and its bond character can be varied as well as the head group. Each compound may have distinct
physical and chemical properties. Accordingly, one of the aims of boundary lubrication research is to
characterize the physical and chemical properties that improve lubrication and wear resistance in order
to design and optimize technically relevant boundary lubricants. Typical self-assembling monolayers are
thiols (–SH end group), which bind chemically to gold, and silanes (–SiR
3
end groups). Very common
LB films are Cd–arachidate films, which are a well-established standard for boundary lubrication.
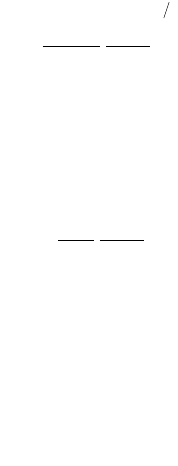
The first SFFM experiment on boundary lubrication was performed on these films (Meyer et al.,
1992a). Figure 6.22 shows a Cd–arachidate film of both 1- and 2-bilayer height on an Si wafer substrate,
which is visible on the lowest level. With an applied normal force of 4 nN, the frictional force on the
silicon substrate was found to be 3 nN and about 0.2 nN on areas that were covered with the organic
© 1999 by CRC Press LLC
film. No difference in friction was measured between the first and second bilayer within an accuracy of
10%. The friction was thus reduced by about a factor of ten on film-covered surfaces, which is in
agreement with the magnitude of reduction observed on the macroscopic scale (Bailey and Courtney-
Pratt, 1954). This observation shows that the LB film acts as a lubricant on a nanoscopic scale.
At loads between 1 and 10 nN, only small changes in the frictional force on the LB films were measured
and are taken in a first approximation to the constant (see Figure 6.22d). Wear processes started at forces
above 10 nN. Above this critical value small islands were moved in their entirety, which were then absent
in the topography image. Figure 6.23a and b shows an area on a bilayer film, imaged with an nonde-
structive load of 4 nN, while Figure 6.23c and d was taken on the same area imaged with an increased
force of 16 nN. The island indicated by an arrow was sheared to the upper margin of the scanned area.
In a subsequent wide-area topographic scan, the sheared particle was found again. It still had bilayer
FIGURE 6.22 SFFM study of a double bilayer of
Cd–arachidate. Scan size is 2
× 2 µm
2
. Image (a) shows
the topography of these films and image (b) the measured
friction force. The total vertical scale in the topographic
image is 24 nm and in the friction image 14 nN. In the
topographic image the lowest level corresponds to the
silicon substrate, the next level to the first bilayer, and the
highest level to the second bilayer of the LB film. The
friction force image shows a higher friction on the sub-
strate and the same friction on the single- and double-
bilayer surfaces. Figure (c) is a schematic diagram of the
Cd–arachidate molecules on the substrate. The graph (d)
shows how the lateral force varies with normal load on
the silicon substrate () on the first and second bilayer
of the LB film () as well as on the step edges (). (From
Meyer, E. et al. (1992), Phys. Rev. Lett. 69(12), 1777–1780.