Bhushan B. Handbook of Micro/Nano Tribology, Second Edition
Подождите немного. Документ загружается.

© 1999 by CRC Press LLC
discussion, see Pethica and Sutton, 1995). The decay of this interaction is described by a function i(z),
where z is the distance between the surfaces. The surfaces of tip and sample are parameterized by T(x)
and S(x), respectively. To simplify the model further, we will restrict the analysis to one dimension. The
total interaction between tip and sample is then
(6.15)
The term ∆ takes account of the scanning, that is, by varying the distance ∆, the relative position of tip
and sample is changed. Assuming some geometry for the tip and for the sample, this integral can be
solved. A general geometry for an SPM setup on an atomic scale is a slowly varying corrugated surface
where a
s
is the corrugation of the surface, k
s
the corresponding reciprocal lattice vector, and h a function
which describes the slow variation of the surface height (that is, h' (x) k
s
). The tip is assumed parabolic
with an atomic corrugation,
where a
T
is the corrugation of the tip, R the tip radius, and a
TS
cos (k
s
x) a term which is introduced
phenomenologically. Such a term could arise from interaction with the surface and would describe, for
example, a flake of surface material picked up by the tip or some sort of reconstruction on the tip induced
by the surface. This term has the same periodicity as the surface and it seems reasonable that only one
of the terms a
T
or a
TS
is important for a given tip–sample system. In the case of contact mode SFM and
SFFM the tip and the surface are deformed and a mechanical contact of radius r
c
is formed (see
Section 6.4.2). Then, the main interaction is through the contact area; therefore, the term describing the
parabolic tip can be omitted and the integral can be evaluated only cover the contact radius. A Taylor
expansion of the interaction around a mean height h
0
(x – ∆) up to second order leads to
where h
0
(x – ∆) is a mean height and δh (x – ∆) = a
s
cos (k
s
(x – ∆)) – a
T
cos (k
T
(x)) – a
TS
cos (k
s
(x)).
This integral can be interpreted in terms of the mean value of the integrand averaged over the contact
radius r
c
:
If the contact radius is large compared to the periodicity of the lattice, then the term 〈δh (∆)〉
r
c
vanishes
and the only nonvanishing term in 〈δh
2
(∆)〉
r
c
is due to 〈a
s
cos (k
s
(x – ∆)) · a
TS
cos (k
s
(x))〉
r
c
. Therefore,
the total interaction is
IiTxSxdx
tot
∆∆
()
=
()
−−
()
()
−∞
+∞
∫
.
Sx a k x hx
SS
−
()
=−
()
()
+−
()
∆∆∆cos ,
Tx a kx x R a kx
T T TS S
()
=
()
++
()
cos cos ,
2
2
Iihx
i
z
hx
i
z
hx dx
r
r
c
c
tot
∆∆∆∆
()
−
()
()
+
∂
∂
−
()
+
∂
∂
−
()
−
+
∫
0
2
2
2
1
2
δδ,
Irih
i
z
h
i
z
h
c
r
rr
c
cc
tot
∆∆∆ ∆
()
()
()
+
∂
∂
()
+
∂
∂
()
2
1
2
0
2
2
2
δδ.
Irih
i
z
aa k
c
r
STS S
c
tot
∆∆ ∆
()
()
()
+
∂
∂
()
2
1
2
0
2
2
cos ,
© 1999 by CRC Press LLC
from which we see that, under the assumptions made, the atomic periodicity is “resolved” as the tip scans
the sample — that is, as ∆ is varied — even though the “true” resolution is much less, namely, of the
order of the contact radius. To resolve the atomic periodicity with a large contact radius, the term a
TS
which was introduced above has to be nonzero; the tip therefore has to have the same periodicity as the
surface. To achieve “true” atomic resolution within this simple model, the contact radius would have to
be reduced to atomic dimensions and the tip would have to be sharp enough, which is what is expected
intuitively. If this is the case, however, the term 〈δh (∆)〉
r
c
does not necessarily vanish and thus the integral
15 should be computed without approximations.
6.4.2 Deformation of Tip and Sample
The deformation of tip and sample is fundamental to the adhesion and friction of any contact, including
the special case of an SFM or SFFM setup. To describe these deformations, continuum theories are
generally used. A detailed description of contact mechanics can be found in Johnson (1985). The first
approach to contact mechanics is due to Hertz (1881). He showed that two elastic solids of radii R
1
and
R
2
pressed against each other with a loading force F
n
deform elastically and touch on a circle of radius
(6.16)
where R
*
is an effective radius such that 1/R* = 1/R
1
+ 1/R
2
and E
*
is an effective modulus of elasticity
such that 1/E* = (1–ν
2
1
)/E
1
+ (1–ν
2
2
)/E
2
, with E the modulus of elasticity and ν Poisson’s ratio. In the case
of SFM and SFFM, the sample is assumed flat and the tip of radius R
tip
, and correspondingly R
*
= R
tip
.
Due to the elastic deformation, distant parts of the two bodies approach each other by a distance δ =
r
2
c
/R
*
. With Equations 6.16 this relation can be restated as
from which the amount of elastic energy V
el
(δ) stored in the system is computed by integration:
and the stiffness c
con
of the contact by differentiation:
(6.17)
The elastic energy V
el
(δ) can be interpreted as a repulsive surface potential which acts only after tip and
sample have touched. It should be noted, however, that the distance δ is not directly the indentation
distance of the tip. Another important magnitude is the pressure distribution p(r) in the contact region:
If in addition to the normal loading force a lateral force F
lat
is applied to the tip and if the friction is high
enough to prevent slip, then the tip–sample contact will be deformed laterally. The corresponding lateral
displacement of the contact is (Johnson, 1985):
r
R
E
F
cn
=
3
4
13
*
*
,
FRE
n
δδ
()
=⋅⋅
4
3
32
*
,
VRE
el
δδ
()
=⋅⋅
8
15
52
*
,
cREEr
ccon
δδ
()
=⋅⋅=⋅22
12
*
*
.
pr
F
r
r
r
n
c
c
()
=
π⋅
−
3
2
1
2
2
.
© 1999 by CRC Press LLC
where G
*
is an effective modulus of elasticity such that 1/G
*
= (2 – ν
T
)/G
T
+ (2 – ν
S
)/G
S
, G
T
and G
S
are
the shear moduli of tip and sample, respectively, and ν
T
and ν
S
the corresponding Poisson ratios. The
lateral stiffness of the contact is then
(6.18)
And, finally, the shear stress in the contact region is
The Hertz theory does not account for surface forces and adhesion. Due to these surface forces, bodies
adhere to each other and will be deformed slightly by adhesion forces. The adhesion force of a sphere
or a parabolic tip on a flat surface is (Israelachvili, 1992)
(6.19)
where R is the tip radius and γ is the surface energy. This attractive adhesion force acts in addition to
any external load. Therefore, the simplest way to take into account adhesion in the deformation of the
tip–sample contact is to define an effective normal force as F
n
= F
load
+ F
ad
, and to apply Equation 6.16
with this effective normal force. At zero load the contact radius is then (3πγR
2
/E
*
)
1/3
. This approach is
appropriate if the deformation of the tip–sample contact induced by surface forces is small compared
with the deformation due to the contact forces, which is the case if the two bodies are sufficiently rigid.
If, on the contrary, the surface forces are not negligible, then the exact shape of the contact will differ
from the one predicted by the Hertz theory. One way to account for the surface forces is to allow the
tip–sample contact to deform in order to increase the contact area and thus the surface energy. The shape
of the tip–sample contact is then determined by the balance between the elastic energy needed to deform
the contact and the surface energy gained as the contact forms. This is the basic idea behind the JKR
theory (Johnson, 1971), which predicts a contact radius
(6.20)
with F
ad
= 3πγR. For vanishing surface energy, the Hertz relation is recovered. For a nonvanishing surface
energy, the JKR theory predicts an adhesion force –F
ad
, which is lower than the adhesion force predicted
by the Hertz theory. According to Equation 6.20, the minimum contact radius r
min
= (3R·F
ad
/4E
*
)
1/3
is
obtained with a tensile force F = –F
ad
. Due to surface forces, a neck forms between tip and sample which
becomes unstable if the minimum contact radius is reached. This is especially relevant in SFM and SFFM
because it means that, unlike in the case of the Hertz theory, the contact radius cannot be reduced to
atomic dimensions by compensating the adhesion force adequately.
The JKR theory describes adhesion by means of the surface energy. For a complete description of the
contact problem, the finite range of the surface forces has to be taken into account. Forces act not only
in the contact region, but also further out, where the two bodies are not in direct mechanical contact
δ
lat
lat
=
⋅
F
rG
c
8
*
,
crG
clat
=⋅8
*
.
Sr
F
r
r
r
c
c
()
=
π⋅
−
−
lat
2
1
2
2
12
.
FR
ad
=π⋅⋅4 γ ,
r
RF
E
F
F
F
F
c
=
⋅
++ +
3
4
221
13
ad
ad ad
*
,
© 1999 by CRC Press LLC
but separated by distances so small that interaction forces are still present. The exact shape of the whole
contact is then determined by the balance of forces due to the surface potential and due to the elastic
deformation of tip and sample. Furthermore, most approaches neglect lateral forces, which are only
treated in very recent studies (Johnson, 1997a,b). A more-detailed description of these theories can be
found in Chapter 5 by Burnham.
6.4.3 Modeling of SFM and SFFM: Energy Dissipation
on an Atomic Scale
For a detailed understanding of an instrument, a model is usually developed that retains its fundamental
properties but is still as simple as possible. In the present section, such a model will be discussed for
SFM and SFFM (Zhong and Tománek, 1990; Tománek et al., 1991; McClelland and Gosli, 1992; Colchero
and Marti, 1995; Colchero et al., 1996b; as well as Gyalog et al., 1995). To keep ideas simple, the model
will be restricted first to one dimension; therefore the behavior normal to the surface and the behavior
lateral to the surface will be analyzed separately. From an experimental point of view, in an SFM only
the behavior normal to the surface is important. On the other hand, from the theoretical point of view,
any SFM is also an SFFM: for nonvanishing friction, lateral forces always act on the tip independently
of whether these forces are measured or not.
6.4.3.1 Modeling Energy Dissipation
Energy dissipation in SFM and SFFM can be understood in terms of a simple spring model: two springs
held together, for example, by magnets at one end and attached to rigid supports at the other. As the
supports are separated, potential energy is stored in the springs. Since the force on each spring is the
same, one finds F = ∆
1
/c
1
= ∆
2
/c
2
. The energy stored E
i
in each spring can therefore be written as
(6.21)
and the total energy is E
tot
= E
1
+ E
2
= (1/c
1
+ 1/c
2
)F
2
/2, from which the effective spring constant of the
total system is determined as
(6.22)
The energy stored in each spring (see Equation 6.21) scales as
(6.23)
Correspondingly, most energy is stored in the weakest spring. If the springs are separated enough and
the springs break apart, the elastic energy stored in each spring will be converted into kinetic energy.
Since the total system is now separated into two springs that cannot interact with each other any longer,
the energy is finally dissipated within each spring. The energy is therefore dissipated according to
Equation 6.23.
This simple model can be applied directly to an SFM setup; each component that can store elastic
energy is represented by a spring with the corresponding force constant (see also Equation 6.30). Usually,
in SFM the cantilever is the softest spring, so that the most energy is dissipated in the cantilever. However,
the other extreme — the cantilever being the stiffest spring — is also possible as, for example, in STM.
In STM the tip is ideally stiff, but snapping still occurs due to the intrinsic elasticity of the tip–sample
contact (Smith et al., 1989). In this case all the energy dissipated during snapping into and out of contact
is dissipated in the microscopic degrees of freedom of the tip–sample system.
E
c
F
c
E
F
c
1
1
1
2
2
1
2
2
2
2
1
2
1
2
=⋅= =∆ ,and, correspondingly,
111
12
ccc
tot
=+.
E
E
c
c
1
2
2
1
= .

© 1999 by CRC Press LLC
6.4.3.2 SFM and Normal Forces
A simple model for an SFM is shown in Figure 6.30. The main components are the tip, a spring, its rigid
support, and the sample to be studied. It is fundamental to note that the rigid support and not the tip
is moved with respect to the sample surface. Three different distances are relevant in this model: the
tip–sample distance z, the deflection d of the spring, and the separation ∆ between the rigid support and
the sample. However, only two of these distances are independent, since d = z –∆. The separation ∆ is
the distance that is controlled experimentally, z the distance usually used to describe the tip–sample
interaction as a function of distance, and d the deflection measured. In the present discussion, z and ∆
will be chosen as independent parameters which determine the state of the SFM setup. To determine the
behavior of the system, a standard analysis in terms of classical mechanics for zero temperature will be
presented (for T ≠ 0, see Dürig et al., 1992). The total energy of the tip–sample contact is determined
by the elastic energy V
el
(d) stored in the system as well as by the potential energy V
surf
(z) of the tip in
the surface potential. The elastic energy will first be assumed to be due to the elastic energy of the spring
representing the cantilever, V
el
(d) = c · d
2
/2. In this case, the total energy is
(6.24)
In the right part of the equation, the total energy has been written in terms of the two independent
parameters z and ∆. In a typical SFM setup, the separation ∆ is controlled experimentally, but the tip is
free to move to an equilibrium position by varying its tip–sample distance, z; therefore, the force
equilibrium condition is
(6.25)
This force equilibrium condition determines the tip–sample distance z
eq
for each separation ∆. If this
separation is varied, in general the equilibrium distance also varies. By solving Equation 6.25 for different
separations ∆, the curve z
eq
(∆) is evaluated, which is fundamental to the behavior of the tip–sample
contact. To have stable equilibrium, Equation 6.25 is not sufficient; in addition,
(6.26)
has to hold. For repulsive potentials, that is, if the force increases as the distance is decreased, this condition
is always fulfilled. However, for sufficiently attractive potentials, this relation will fail. Then, the tip jumps
onto the surface.
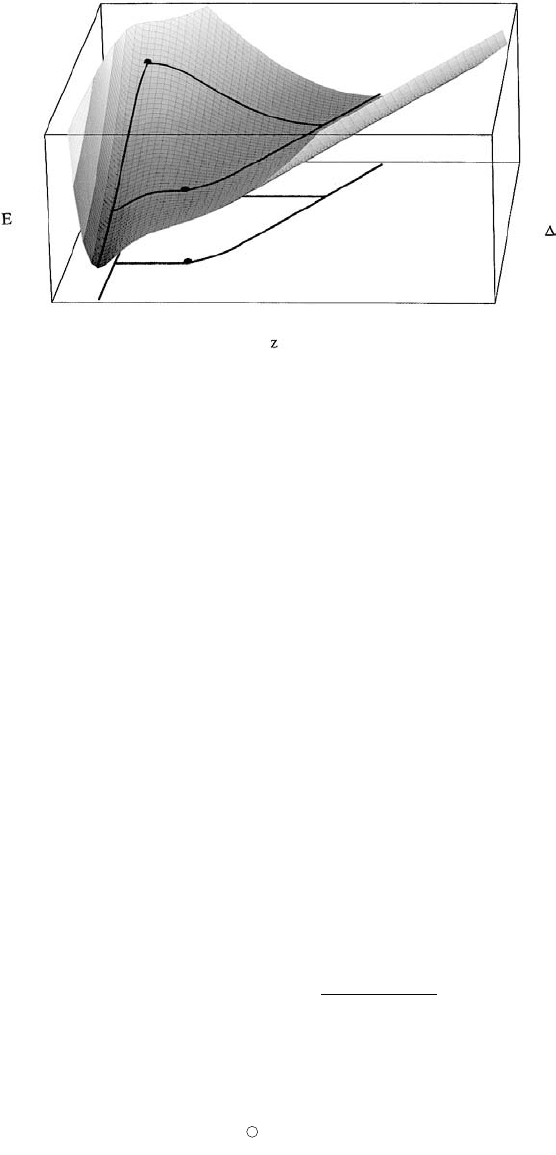
The tip–sample behavior can be illustrated as follows. Consider the two-dimensional energy surface
V
tot
(z, ∆) shown in Figure 6.31. Any possible configuration of the tip–sample contact is represented by
FIGURE 6.30 Simple model for a typical SFM setup. The surface poten-
tial V
surf
(z) and the potential V
el
(d), which represents the elastic energy
stored in the system, are represented by springs. (From Colchero, J. et al.
(1996), Tribol. Lett. 2, 327–343. With permission.)
VzdVzcdVzcz Vz
tot surf surf tot
,,.
()
=
()
+⋅=
()
+⋅−
()
=
()
1
2
2
1
2
2
∆∆
Fz
dV z
dz
dV z
dz
cz
tot
tot surf
,
,
.∆
∆
∆
()
=−
()
=−
()
−⋅ −
()
= 0
cz
dV z
dz
dV z
dz
c
tot eq
tot eq surf eq
∆
∆∆ ∆
()
()
=
()
()
=
()
()
+>
2
2
2
2
0
,
© 1999 by CRC Press LLC
a point on this energy surface corresponding to the coordinate (z, ∆) and to an energy V
tot
(z, ∆). For
each fixed separation ∆
0
, the curve V
tot
(z, ∆
0
) is an energy curve on which the tip can move to minimize
its energy. The equilibrium condition, together with the stability condition (Equation 6.26) and the
additional assumption that the tip movement is “quasi-static” (the tip does not oscillate), restricts the
possible configurations to the local minima of these curves, that is, to the valleys seen in Figure 6.31. As
the separation ∆ is varied, the tip–sample contact will evolve to a new equilibrium position in the same
valley. If the system, however, is moved past the end of a valley, it will not be stable and move to the
other valley. Since this other valley is lower than the end point of the first valley, the system will oscillate
around the new minimum until its kinetic energy is damped. We will assume that some damping
mechanism exists and will discuss its nature below. If the separation ∆ is varied in a sufficiently large
cycle, the system will evolve along the curve V
tot
(z
eq
(∆),∆) indicated by the solid line in Figure 6.31. The
projection of this curve onto the (z, ∆)-plane defines the curve z
eq
(∆), which is the tip–sample separation
as a function of the separation ∆.
For a given surface potential the tip–sample distance z
eq
(∆) can be constructed uniquely from the
equilibrium condition and from the stability condition. In a typical SFM experiment, the force — more
precisely, the deflection of the cantilever — is measured as the separation ∆ is varied. This so-called force
vs. distance curve (Weisenhorn et al., 1989) does not correspond to the force curve F(z), but to
Another important question is the energy that is dissipated during the acquisition of one force vs.
distance curve. This energy is the area enclosed by the force vs. distance curve and can be written as
In the discussion above, the deformation of the tip–sample contact was not taken into account. The
elastic energy was described only by the harmonic potential of the spring. The model can be generalized
FIGURE 6.31 Energy surface that describes the state of an SFM tip–sample system. The coordinate ∆ describes the
experimentally controlled distance between the sample and the base of the cantilever. The coordinate z represents
the tip–sample distance. As the distance ∆ is varied, the system evolves along the solid curve in one of the two valleys.
The system becomes unstable at the high end of a valley and moves to the lower valley. The projected curve z(∆) in
the (∆, z)-plane visualizes the hysteresis of the system. (From Colchero, J. et al. (1996), Tribol. Lett. 2, 327–343. With
permission.)
Fcz
dV z
dz
∆∆∆
∆
()
=⋅
()
−
()
=−
()
()
eq
surf eq
.
EFd=
()
∫
∆∆.

© 1999 by CRC Press LLC
to account for the elastic energy stored in the tip–sample contact by introducing the corresponding
potential (Colchero et al., 1996b). Within this generalized model, the total elastic energy stored in the
SFM setup can be approximated by assuming that this energy is stored in an effective spring with an
effective force constant c
eff
defined by
where c
con
= 2E
*
·r
c
is the stiffness of the tip–sample contact (see Equation 6.17).
To illustrate the formal description of the SFM setup presented above and to analyze the dissipation
of energy, a typical force vs. distance curve will be discussed in physical terms (see also Tabor, 1992).
First, the tip is far from the sample, feels no surface potential, and is not deflected. As the (base of the)
cantilever approaches the sample, surface forces begin to act. Due to the attractive surface potential, the
tip approaches the surface more than the increase of the separation: δz = δ∆ + δd, where δz is the increase
in tip–sample distance, δd the increase in deflection, and δ∆ the increase in separation. Eventually, the
spring is not “strong” enough to hold the tip and the tip jumps onto the surface. During this process,
the tip is first accelerated, then hits the surface, and is suddenly stopped. This will induce vibrations of
the cantilever, but also a sudden elastic deformation of the microscopic tip–sample contact, which in
turn will result in elastic waves propagating out of the tip–sample contact. After some time, the kinetic
energy gained by the tip during the snapping process will be effectively removed from the tip–sample
system either into the macroscopic cantilever or into the two solids tip and sample. A similar process
happens when the tip is separated from the sample. Due to adhesion, the tip sticks to the sample. Elastic
energy is built up in the deformation of the cantilever, but also in the microscopic deformation of the
tip–sample contact. When this contact breaks, the cantilever will vibrate and the elastic deformation of
the tip–sample contact will relax. Again, the elastic energy stored in the system will be converted into
kinetic energy of the cantilever, or into waves in the tip and the sample, and will in the end be dissipated
due to some kind of friction (for example, internal friction in the solids or air damping in the case of
the cantilever).
6.4.3.3 SFFM and Lateral Forces
In the preceding section a general model for an SFM setup was described. However, this model was
applied only to study the behavior of the tip–sample system as the tip approaches the sample. In the
present section, the model will be applied to study the behavior of the tip–sample contact as the separation
between the support and the sample is varied in a direction parallel to the surface (Zhong and Tománek,
1990; Tománek et al., 1991). This is the situation that corresponds to the usual scanning motion of the
tip. Essentially, the description is as before: the tip is attached to a rigid support by means of a spring
and the sample is moved relative to this support by varying the separation ∆
x
. Again, the tip position is
not controlled directly, but follows from the equilibrium condition. The only difference compared to the
description above is that in order to describe the atomic corrugation of the surface, a surface potential
with the periodicity of the sample is assumed. Ideally, this is the potential that a perfect tip with only
one atom at its apex would “see,” and can be computed from first principles. However, also if a nonideal
tip is in contact with the sample on an area with radius r
c
the effective interaction between tip and sample
will show a modulation with lattice spacing (see Section 6.4.1). The total potential seen by the tip is
therefore (Tománek et al., 1991).
(6.27)
where E
0
is the amplitude of the surface potential, k the reciprocal lattice vector of the surface, and c
x
the
force constant of the system. The stability condition for this potential is c
x
> E
0
· k
2
; therefore, if the
amplitude of the surface potential is sufficiently large, the range of postions with |x| < cos
–1
(c/E
0
· k
2
)/k
111
ccc
eff tip con
=+ ,
Vx E kx
c
x
x
x
xtot
, cos ,∆∆
()
=
()
+⋅−
()
0
2
2
© 1999 by CRC Press LLC
will be unstable. From the equilibrium condition and the stability condition, the curve x(∆
x
) as well as
the lateral force curve F(x(∆
x
)) can be calculated as described in the previous section. The lateral force
curve is equivalent to the force vs. distance curve described above and is the experimental curve which
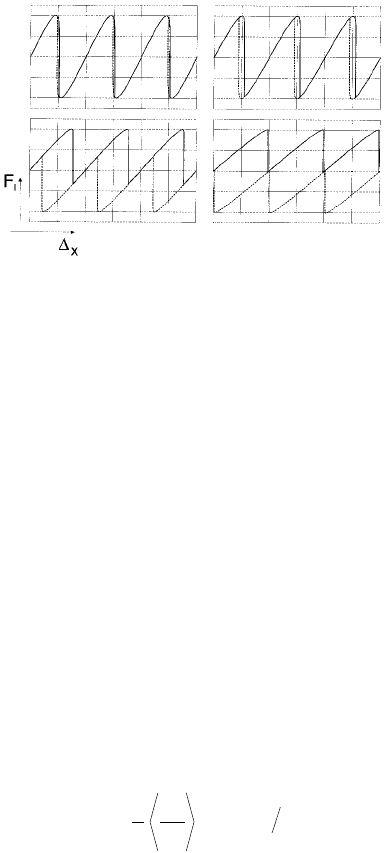
is measured as the tip scans over the surface. Four of these curves are shown in Figure 6.32 for different
values of c/E
0
· k
2
. The solid lines represent the forward scan, the dotted curve the backward scan. As in
the case of a force vs. distance curve, the area enclosed by these lateral force curves corresponds to the
energy dissipated during one scan cycle. As the ratio c/E
0
· k
2
decreases, the dissipated energy increases
and the lateral force curves look increasingly sawtooth-like with the typical stick-slip behavior observed
experimentally. For low values of c/E
0
· k
2
the lateral force curve can be described by a curve which is
determined by the lattice spacing l, a maximum force F
0
, and a force jump ∆F. For this type of curve,
the energy dissipated can be calculated using simple geometric arguments as
(6.28)
where n is the number of stick-slip processes, and the corresponding mean friction force is
The factor ½ takes account of the fact that the energy given in Equation 6.28 is due to a whole scan cycle,
while the friction force is only half the mean total height of the friction loop. Equation 6.28 can be shown
to follow also from the relation describing the energy dissipation of a general lateral force curve (Colchero
et al., 1996b).
6.4.3.4 Two-Dimensional Stick-Slip
The modeling of an SFFM setup above has been restricted to one dimension. However, experimentally
a two-dimensional stick-slip motion is observed (see Section 6.3.1.2). Therefore, in this section the model
described above will be generalized to a real two-dimensional surface (Gyalog et al., 1995). A schematic
view of the corresponding SFFM setup is shown in Figure 6.33, together with a typical lateral force curve.
In analogy with the one-dimensional model, the tip–sample position is described by a vector X = (x, y)
and the separation between the rigid support of the cantilever and the surface by a vector ∆ = (∆
x
, ∆
y
).
The surface potential is a periodic function V
surf
(X) in the x- and y-direction and describes the atomic
FIGURE 6.32 Calculated lateral force curve F(∆) — also called friction loop — for different values of the ratio γ =
c/E
0
k
2
(see text). For each curve, the lateral force is plotted vs. the (lateral) displacement ∆ of the tip. Top: γ = 1.25
(left) and γ = π/2 (right); bottom: γ = π (left) and γ = 4.5 (right). Note the stick-slip-like behavior for high values
of γ. (From reference Colchero, J. et al. (1996), Tribol. Lett. 2, 327–343. With permission.)
Enl F F=⋅⋅ −
()
2
0
∆ ,
F
E
x
FF
fric
=
∂
∂
=−
1
2
2
0
∆ .
© 1999 by CRC Press LLC
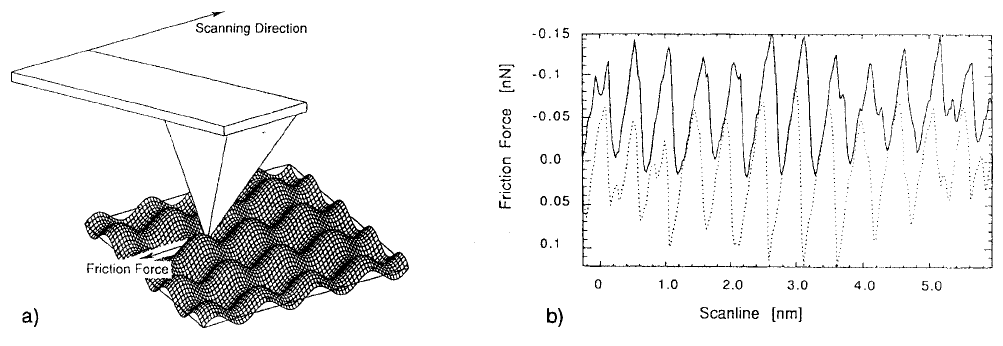
FIGURE 6.33 Schematic setup of an SFFM scanning a two-dimensional surface and a typical lateral force curve. (From Gyalog, T. et al. (1995),
Europhys. Lett. 31(5–6), 269–274. With permission.)

© 1999 by CRC Press LLC
corrugation of the surface. The elastic energy stored in the system is determined by an elasticity matrix
ˆ
C
(see Section 6.2.1.1) and is
where X–∆ is the deflection of the tip from its zero-force position. This relation is the generalization of
Equation 6.27 for a one-dimensional harmonic potential. The total energy of the tip–sample system is
V
tot
(X, ∆) = V
surf
(X) + V
el
(X, ∆). For a fixed separation ∆, the tip can minimize its energy by varying
the tip–sample position X. The corresponding two-dimensional equilibrium and stability conditions are
where the numbers λ
1,2
are the eigenvalues of the Hessian matrix H
ij
= ∂
2
V
tot
/∂x
i
∂x
j
. From the equilibrium
condition, the separation
(6.29)
as a function of the tip–sample distance X is determined. However, since the separation ∆ and not the
position X is controlled experimentally, the function X(∆) is needed to specify the behavior of the
tip–sample contact. If the surface potential is sufficiently corrugated, the function ∆(X) has the same
value for different X values; therefore, the inverse function X(∆) is not well defined. Physically, this means
that the tip can be in more than one position for a given separation ∆. As in the one-dimensional case,
the exact configuration of the tip–sample contact is determined by the history of the system, which leads
to hysteresis of the lateral force curve and to energy dissipation. To characterize the two-dimensional
stick-slip motion of the tip, the areas (x, y) of the surface, as well as the separations (∆
x
, ∆
y
) which
correspond to instable positions, have to be determined. These positions (x, y) on the surface are given
by all the points where the Hessian matrix H
ij
has a nonpositive eigenvalue. The borders of these areas
form closed curves in the (x, y)-plane. To determine the separations where the tip jumps, these curves
are imaged into the (∆
x
, ∆
y
)-plane by applying Equation 6.29. The corresponding curves in the (∆
x
, ∆
y
)-
plane are again closed curves, so-called critical curves. A scanning path is described by a line in the (∆
x,
∆
y
)-plane. If this line crosses such a critical curve, the system becomes unstable and jumps into a new
(tip–sample) position. These critical curves are shown in Figure 6.34 for a hard and soft spring (top) in
the case of isotropic support (
ˆ
C = c · Î), as well as for a hard and soft spring (bottom) in the case of
asymmetric support. For soft springs, the areas enclosed by the critical curves overlap; then all paths
show friction, and slip motion occurs when the critical curves are crossed. For hard springs, the areas
enclosed by the critical curves do not overlap. Then paths exists with and without friction.
The lateral force curve is obtained from the computed equilibrium position X(∆) as in the one-
dimensional case:
At points ∆
0
on the critical curve, the tip–sample contact is not stable and moves into the next stable
minimum which is found by following the curve of steepest descent on the potential surface V
tot
(X, ∆
0
).
After the excess energy has been damped, the tip–sample contact is in this nearest minimum and continues
to evolve along the curve until the next critical curve is crossed.
In conclusion, this two-dimensional stick-slip model generalizes the one-dimensional model discussed
earlier and explains all features of the observed two-dimensional lateral force curves.
V
el
XXCX,
ˆ
,∆∆∆∆∆∆
()
=−
()
−
()
1
2
oo
∇
()
=⇔∇
()
=−
()
≥
XX
XXCXVV
tot surf
,
ˆ
,
,
∆∆∆∆0
0
12
o
λ
∆∆ XXC X
X
()
=− ∇
()
−
ˆ
1
o V
surf
FX C X∆∆∆∆∆∆
()
()
=
()
−
()
ˆ
.o