Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

4.1.
Стабилизация
объекта второго
порядка
161
Но даже при постоянных параметрах и / =
О
качество переходных про-
цессов может сильно варьироваться с изменением параметров и не соответ-
ствовать предъявляемым к системе требованиям.
Таким образом, может быть сформулирована следующая проблема:
•
как добиться независимости свойств замкнутой системы от факто-
ров неопределенности при ограниченных коэффициентах передачи
в каналах обратной связи?
4.1.3.
Фазовое пространство координата—оператор
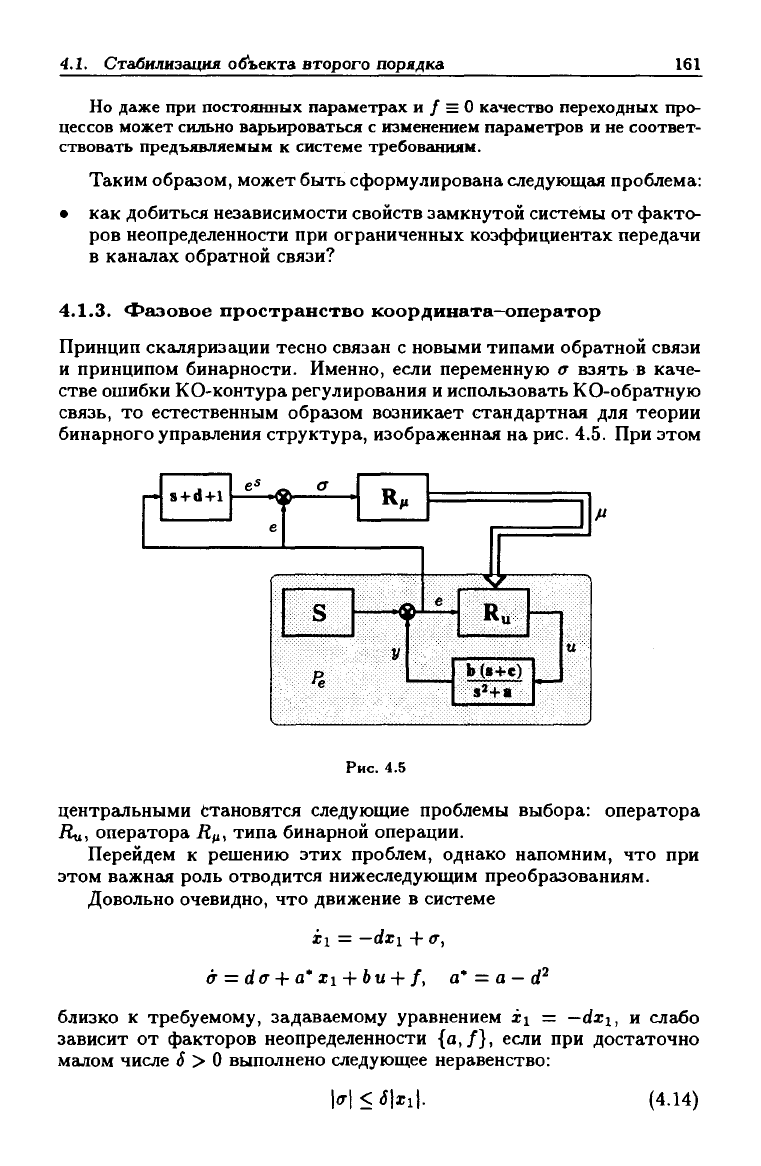
Принцип скаляризации тесно связан с новыми типами обратной связи
и принципом бинарности. Именно, если переменную <г взять в каче-
стве ошибки КО-контура регулирования и использовать КО-обратную
связь, то естественным образом возникает стандартная для теории
бинарного управления структура, изображенная на рис. 4.5. При этом
s+d+l
е«
'V
е
Ь
'^
9
"
^
S
Ре
D
К;,
•
б^
У
е
Л7
Ru
b (s+c)
•t
u
Рис.
4.5
центральными Становятся следующие проблемы выбора: оператора
R^,
оператора Д^, типа бинарной операции.
Перейдем к решению этих проблем, однако напомним, что при
этом важная роль отводится нижеследующим преобразованиям.
Довольно очевидно, что движение в системе
xi = —dxi -f-
(Г,
& =
d<r
+ a*xi + bu + f, а* = а
—
(Р
близко к требуемому, задаваемому уравнением xi = —dxx, и слабо
зависит от факторов неопределенности
{а,/},
если при достаточно
мгшом числе S >
Q
выполнено следующее неравенство:
\<T\<SW\.
(4.14)
162
Глава 4. Теория
коордииатио-операторной обратной
связи
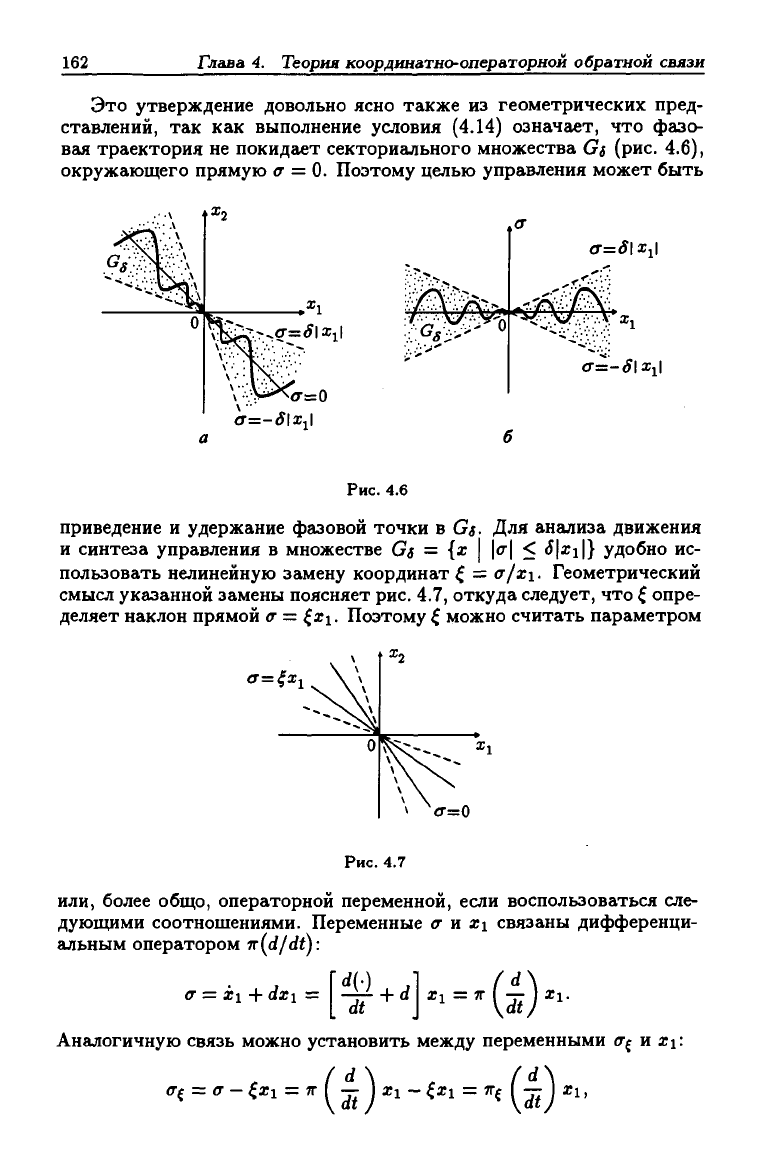
Это утверждение довольно ясно также из геометрических пред-
ставлений, так как выполнение условия (4.14) означает, что фазо-
вая траектория не покидает секториального множества d (рис. 4.6),
окружающего прямую (т = 0. Поэтому целью управления может быть
<T=S\x^\
q=.S\x^\
<T=-J| Xjl
Рис.
4.6
приведение и удержание фазовой точки в Gg- Для анализа движения
и синтеза управления в множестве Gs = {х \
\сг\
< S\xi\} удобно ис-
пользовать нелинейную замену координат ^ =
(T/XI.
Геометрический
смысл указанной замены поясняет рис. 4.7, откуда следует, что ^ опре-
деляет наклон прямой
(т
= ^xi. Поэтому ^ можно считать параметром
<т=4х
Рис.
4.7
или, более общо, операторной переменной, если воспользоваться сле-
дующими соотношениями. Переменные
<7
и xi связаны дифференци-
альным оператором ir(d/dt):
(т
^ xi
-\-
dx\ =
dt
•¥d
xi
='Ш
х\.
Аналогичную связь можно установить между переменными а^ и xi:
4.1.
Стабилизация объекта второго порядка
163
где
'^^
(л) = Л
+ d-C
Поскольку ^ определяет оператор К(, то ее уместно ншвать опера-
торной переменной. Следовательно, пространство (xi,^) можно на-
звать фазовым пространством координата-оператор, или, коротко,
КО-пространством. Какую же пользу можно извлечь из указанной
замены переменных?
Для ответа на этот вопрос достаточно найти уравнение изменения
новой переменной ^ =
(T/XI.
Положим пока, что / = О, тогда имеем
последовательно:
• _ (т (Г XI _
dcr
+
Ьи
+ a*xi а а
—
dx\ _
Xl Xi Xi Xi Xi Xl
Xl
Если теперь ввести обозначение ц = и/хх и назвать /i новым управле-
нием, то проблема стабилизации свободного движения параметриче-
ски неопределенного объекта
<т
=
cf(T
-f a'xi + bu
сводится к проблеме стабилизации определенного объекта, находяще-
гося под воздействием координатного возмущения а*, так как теперь
мы имеет дело с уравнением Е{ вида
^di-ai-d) +
b^L
+ a\
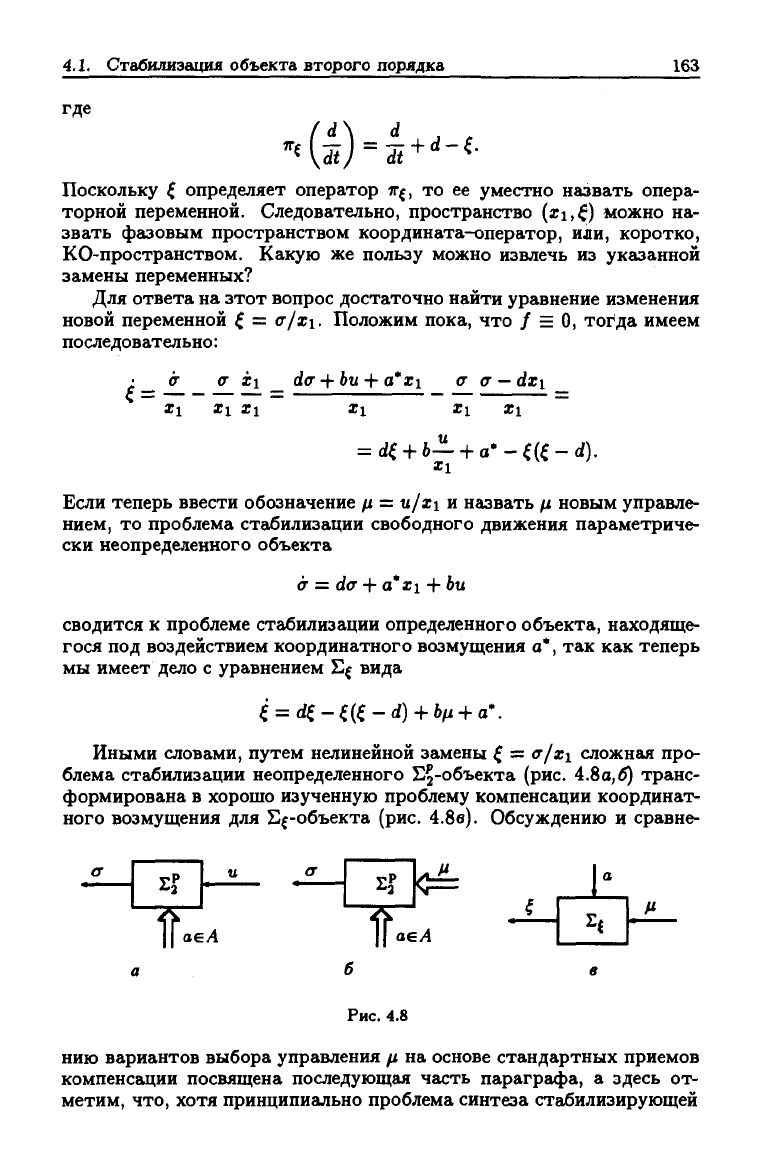
Иными словами, путем нелинейной замены ^ = (T/XI сложная про-
блема стабилизации неопределенного Е^-объекта (рис. 4.8а,б) транс-
формирована в хорошо изученную проблему компенсации координат-
ного возмущения для Е{-объекта (рис. 4.8в). Обсуждению и сравне-
Г?
]|
абЛ
2?
^
]|
06/1
Рис. 4.8
нию вариантов выбора управления fi на основе стандартных приемов
компенсации посвящена последующая часть параграфа, а здесь от-
метим, что, хотя принципиально проблема синтеза стабилизирующей
164 Глава 4. Теория
координатио-операторной обратной
связи
обратной связи решена, сложности все-таки неизбежны, так как при-
менение известных принципов должно проходить в новых условиях,
поскольку объект принципиально нелинеен:
XI = ~dxi+^xi,
be В,
а*
еА*.
Ввиду того что эти уравнения действуют на множестве Gs,
&
6 мало,
второе уравнение можно линеаризовать и, без больших потерь в общ-
ности, ограничиться рассмотрением уравнения первого приближения
Завершг1Я этот раздел, заметим, что в ходе преобразования коор-
динат было введено следующее обозначение:
U
/*= —.
которое, по сути дела, задает статическую бинарную операцию
u = l3{ii,xi) =ЦХ1,
определяющую оператор Д„ координатной обратной связи в струк-
турной схеме на рис. 4.5.
Разумеется, это не единственная, но, быть может, простейшая воз-
можность. Можно было бы использовать и динамическую бинарную
операцию, например операцию интегрального
XI J
fidt
или инерционного типа
•//xrft, г =
(
U
— =zT/i+ I ftdt,
т
= const.
Xl
в любом случае общие выводы, конечно, сохраняют силу, однако
вместо скгиярного объекта пришлось бы иметь дело с объектом более
высокого порядка, например, при интегральной бинарной операции
стабилизируемая система описывается системой уравнений
i = 2d^ + bni + a', fii=zfi.
4.2.
КО-алгоритмы стабилизации
Воспользуемся стандартными методами классической теории регули-
рования для синтеза управления, стабилизирующего скалярный объ-
ект:
i = 2d^ +
b^i
+ a-d\ (4.15)
а ел, be В, d>Q.
4.2. КО-алгоритмы
стабилизации
165
4.2.1.
Прямая компенсация
В уравнении (4.15) параметр d^ можно интерпретировать как извест-
ное возмущение, и при известном параметре 6 с помощью прямой ком-
пенсации
^L
= ^l + — (4.16)
влияние этого "возмущения" устраняется, ибо
i=2d^
+ bfii + а.
Если же параметр 6 неизвестен, то прямая компенсация в "лоб" не
проходит, но ее можно успешно сочетать с идентификацией параме-
тров.
Об этом скажем чуть позже, а сейчас заметим, что управлению
(4.16) в исходных переменных отвечает обратная связь вида
d^
и = ЦХ1 =
1Л1Х1
+ -7-Xi,
имеющая бинарную и линейную составляющие.
Заметим, что если параметр а тоже известен, то необходимости в
бинарной компоненте не возникает.
4.2.2.
Асимптотическое оценивание
или косвенное измерение О-воэмущения
Рассмотрим вариант задачи стабилизации объекта
^
i = 2d^ + a + bfii, (4.17)
когда параметры а, Ь фиксированы, 6 известен, а — любой элемент
из А. Для получения оценки а неизвестного параметра а используем
наблюдатель
i = {2d-kl)<p-\-a + k,^ +
b^^,
а = —kiif
—
^), ^1,^2 = const.
После вычитания (4.17) из (4.18) и введения обозначений
е =
(р
—^, а z=a
—
а
с учетом
того,
что параметр о
фиксирован,
т.е.
а = 0,
получим уравнения наблюдателя относительно ошибок (е, а)
e = i2d-k.)e^a,
а = -«26. '
'Здесь и далее для простоты вместо а' = а
—
tfi пишем а, полагая, что компо-
нента d? уже скомпенсирована.
166 Глава 4. Теория
координатио-операторной обратной
связи
Характеристический полином наблюдателя (4.19) имеет вид
det
s-i2d-ki) -1
*2
S
= £^ + s{ki
-
2d) +
Jfc2
= о
и является гурвицевым при выполнении неравенств Агг
>
О,
fci
>
2d.
Поэтому оценка а асимптотически (экспоненциально) сходится к чи-
слу а. Если теперь управление ц сформировать в виде
ti=Mi-j,
(4.20)
то произойдет асимптотическая компенсация возмущения а, так как
^ = 2d^ + bni +
a-
о,
и, следовательно, а
—
а
—>
0.
Таким образом, при выборе управления ^i достаточно иметь дело
со свободным движением объекта:
i = 2d^ + bfix.
В исходных переменных алгоритму управления (4.20) соответствует
алгоритм вида
а
«
=
/iXi
=
filXi
-
-Xi,
где вторую компоненту естественно называть адаптивной. Иными
словами,
• описанный способ асимптотического оценивания постоянного воз-
мущения а реализует стандартную процедуру адаптивного упра-
вления.
Если, однако, а
=
а(<), то теория адаптивного управления не дает
рекомендаций по синтезу стабилизирующего управления, тогда как
развиваемая теория легко переносится на этот случай.
4.2.3.
Компенсация волнового О-возмущения
Пусть известен дифференциальный оператор К (d/dt), аннулирующий
0-возмущение, т.е.
.(i),.o.
Например, известны числа г, р такие, что
а+ра + г = 0, (4.21)
но неизвестно начальное условие а(0), что делает возмущение а неиз-
вестным.
4.2. КО-алгоритмы
стабилизации
167
Согласно рекомендации кл£1Ссической теории регулирования при
стг1билизации объекта
i = 2d^ + bn + a (4.22)
следует по уравнениям (4.21), (4.22) составить уравнения наблюда-
теля, вырабатывающего асимптотическую оценку а возмущения а.
Такой наблюдатель строится стандартным образом и имеет вид
а = —ра - г
— к2(<р
- <).
После почленного вычитания (4.21) и (4.22) из (4.23) и перехода к
ошибкам оценивания
е =
(fi —
^, а = а
—
а
уравнения наблюдателя принимают вид
е = (2^-Ые + а,
а = —ра
—
«ге.
Характеристический полином системы (4.24) дается выражением
det
S
+ (fei - 2d) -1
Аз S + р
= s^ + (p + ki- 2d)s + к2+ p{ki - 2d) = О,
и ясно, что наблюдатель экспоненциально устойчив, когда
ki>2d-p, k2>p{ki-2d).
Последнее условие легко выполнить, и, следовательно, наблюдатель
(4.24) дает асимптотическую оценку
~ ехр
а—^а.
В силу полученной асимптотической оценки управление
а
peuieieT задачу компенсации переменного возмущения a(t) и сводит
исходную задачу стг^билизации к тривиальной задаче стабилизации
объекта
^ = 2de + 6^i.
Отметим, что аналогичный результат невозможно получить, дей-
ствуя в рамках стандартной концепции адаптивного управления.
168
Глава
4.
Теория коордииатио-операторной обратной связи
4.2.4. Релейная К О-стабилизация
При отсутствии волновой модели 0-возмущения, но при известной ма-
жоранте а°, т.е. такой функции или постоянной, что
\a{t)\<a°,
для стабилизации объекта
возможно применение разрывной, в частности, при а° = const, релей-
ной обратной связи
И = -*sgn^.
Тогда замкнутая система описывается уравнением
^ = 2d^
—
к sgn ^ + а, к = const
и при выполнении условия
(4.25)
к>а°
существует окрестность, в которой нуль уравнения (4.25) асимптоти-
чески устойчив.
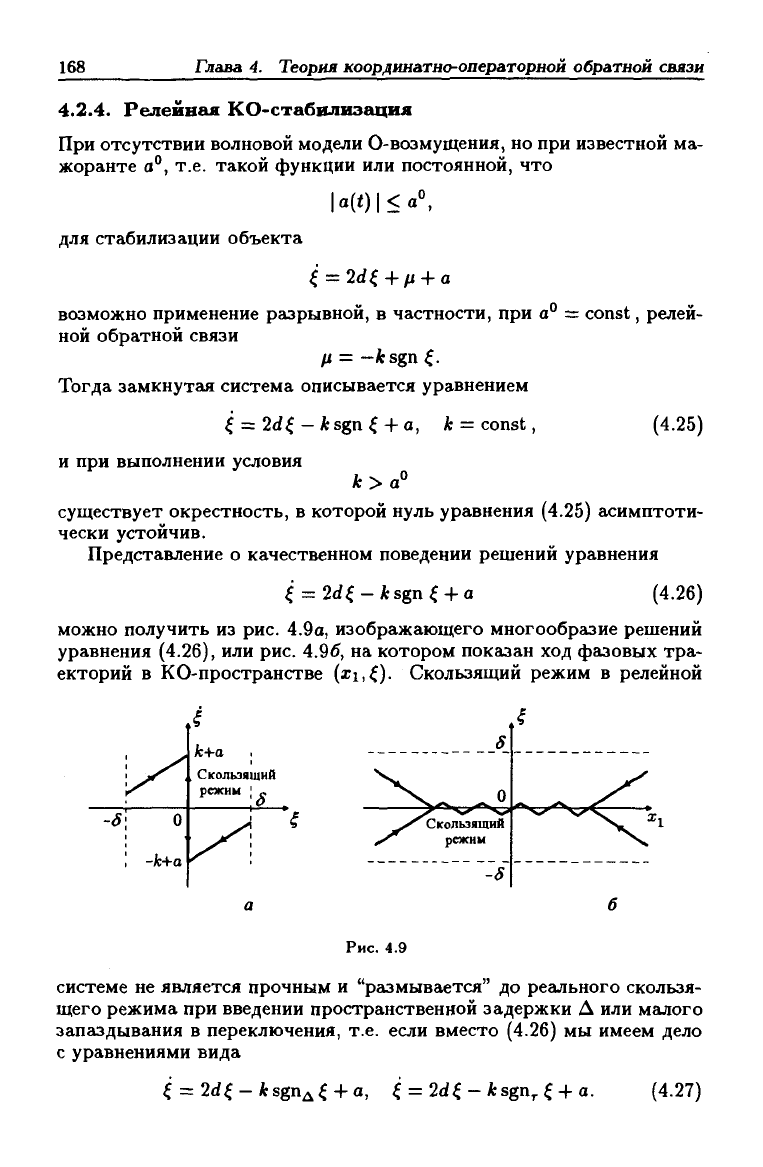
Представление о качественном поведении решений уравнения
^ = 2d^-ksgn^ + a (4.26)
можно получить из рис. 4.9а, изображающего многообразие решений
уравнения (4.26), или рис. 4.96, на котором показан ход фазовых тра-
екторий в КО-пространстве (iCi,^). Скользящий режим в релейной
J
к+а
1
Скользящий
режим
' ~
^
-S
О
-к+а
Рис.
4.9
системе не является прочным и "размывается" до реального скользя-
щего режима при введении пространственной задержки Д или малого
запаздывания в переключения, т.е. если вместо (4.26) мы имеем дело
с уравнениями вида
^ = 2d^-A:sgnд^^-a, ^ = 2di - ksgn^^ + а.
(4.27)
4.2.
КО-етгоритмы стабилизация
169
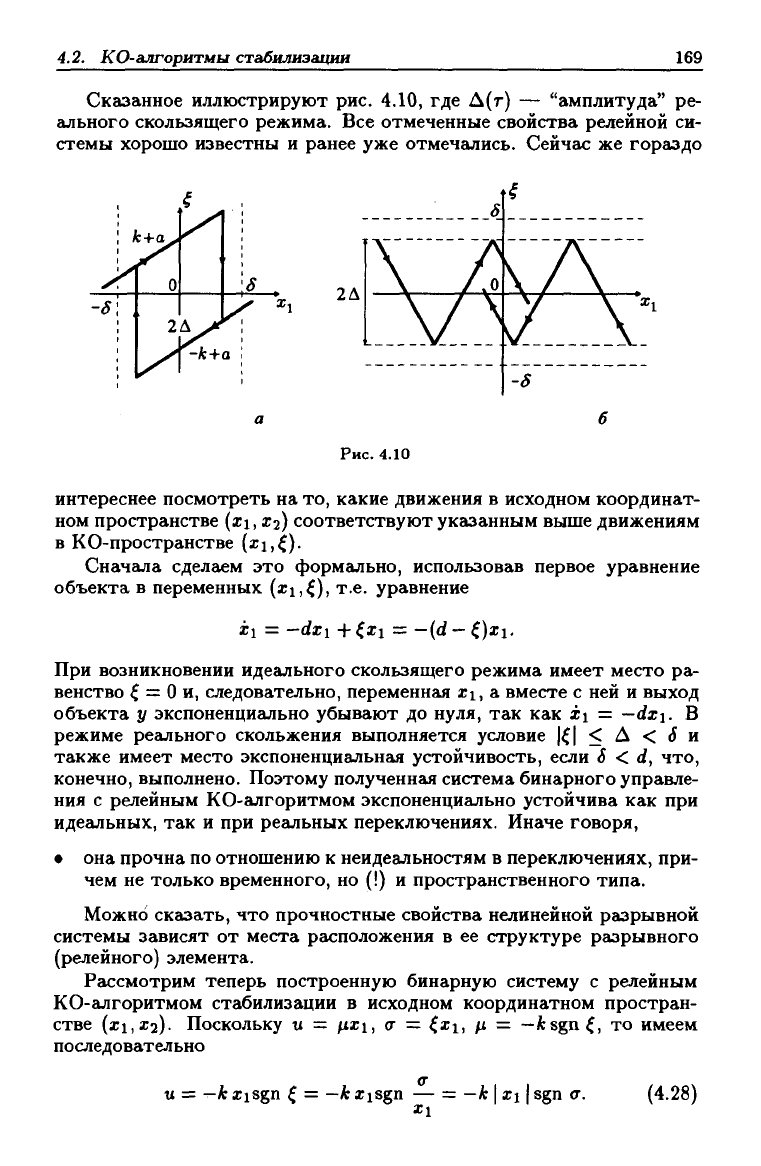
Сказанное иллюстрируют рис. 4.10, где Д(г) — "амплитуда" ре-
ального скользящего режима. Все отмеченные свойства релейной си-
стемы хорошо известны и ранее уже отмечались. Сейчас же гораздо
Рис. 4.10
интереснее посмотреть на то, какие движения в исходном координат-
ном пространстве {xi, гг) соответствуют указанным выше движениям
в КО-пространстве (ii,^).
Сначала сделаем это формально, использовав первое уравнение
объекта в переменных (xj,^), т.е. уравнение
XI = -dxi + ^ari = -{d - i)xi.
При возникновении идеального скользящего режима имеет место ра-
венство ^ =
О
и, следовательно, переменная х\, а вместе с ней и выход
объекта у экспоненцигиьно убывают до нуля, так как xi =
—dxj.
В
режиме реального скольжения выполняется условие |^| < Д < J и
также имеет место экспоненциальная устойчивость, если S < d, что,
конечно, выполнено. Поэтому полученная система бинарного управле-
ния с релейным КО-алгоритмом экспоненциально устойчива как при
идеальных, так и при реальных переключениях. Иначе говоря,
• она прочна по отношению к неидеальностям в переключениях, при-
чем не только временного, но (!) и пространственного типа.
Можно сказать, что прочностные свойства нелинейной разрывной
системы зависят от места расположения в ее структуре разрывного
(релейного) элемента.
Рассмотрим теперь построенную бинарную систему с релейным
КО-алгоритмом стабилизации в исходном координатном простран-
стве (х1,хч). Поскольку и = /ХГ1, а — ^xi, ^ = —fcsgn^, то имеем
последовательно
и — —кxisgn ^ = —кxisgn — — —к\х\\sgn
(т.
(4.28)
XI
170
^лава 4. Теория
координатно-операторной обратной
связи
Распространим действие этого алгоритма управления за пределы
множества Gs на всю плоскость (2:1,12), тогда этот алгоритм стано-
вится стандартным алгоритмом управления систем переменной струк-
туры. Действительно, последнее выражение в (4.28) определяет стан-
дартную V'-ячейку:
f -к, Х1(г> О,
и = фХ1, Ф=< , ^о
[ к, xiff < О,
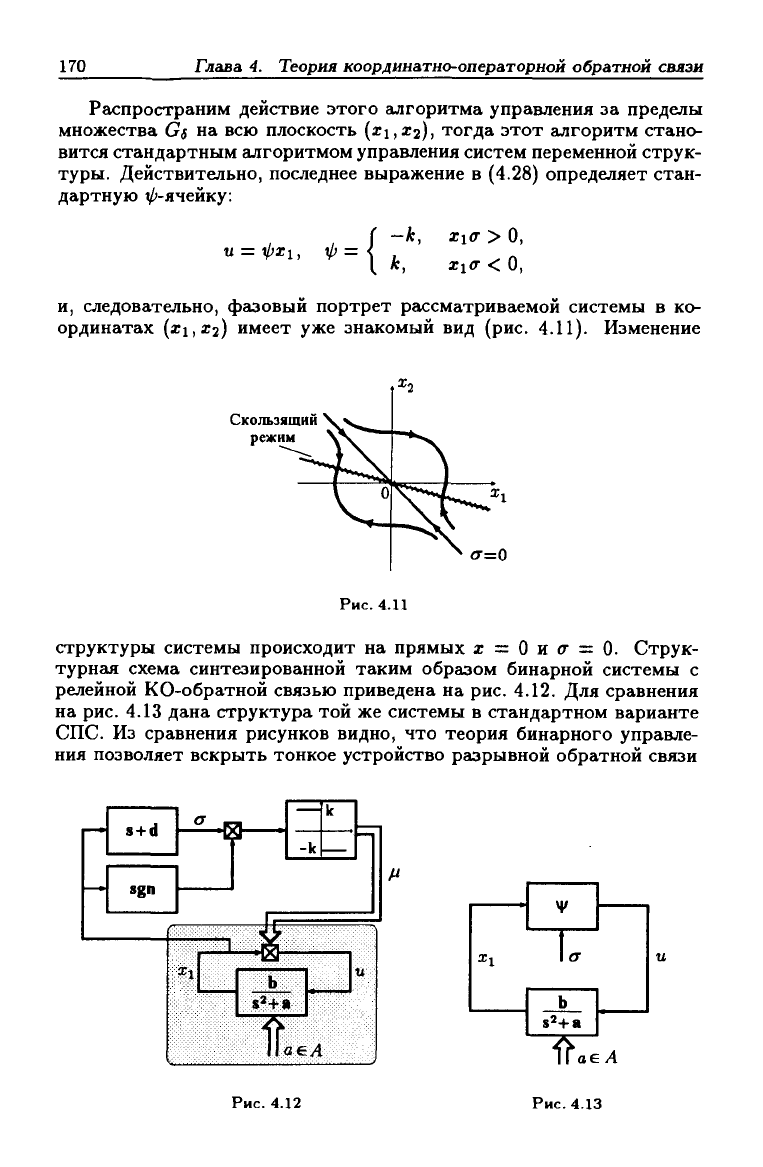
и, следовательно, фазовый портрет рг1СсматриБаемой системы в ко-
ординатах (xi,X2) имеет уже знакомый вид (рис. 4.11). Изменение
Скользящий
режим
<т=0
Рис.
4.11
структуры системы происходит на прямых а; = О и (Т = 0. Струк-
турная схема синтезированной таким обргьзом бинарной системы с
релейной КО-обратной связью приведена на рис. 4.12. Для сравнения
на рис. 4.13 дана структура той же системы в стандартном варианте
СПС.
Из сравнения рисунков видно, что теория бинарного управле-
ния позволяет вскрыть тонкое устройство разрывной обратной связи
s + d
sgn
°' IT
'12
Щ
1
л
У
-к
к
1,
й
•I2SI
b
/}
Рис. 4
ь
аеА
.12
U
М
W
Xi Iff
b
1>ав
A
Рис. 4.13