Георгиев Л.А. Експлоатация на Водносиловите системи (болг. яз.)
Подождите немного. Документ загружается.

ГЛАВА
VI
АВТОМАТИЗАЦИЯ
НА
ВОДНОСИЛОВИТЕ СИСТЕМИ
Под
автоматизирана водносилова система
или
водна
електрическа
централа
[1, 2 и 11] се
разбира
такъв
енергиен
комплекс,
при
който управлението
на
междинните операции
в
общия производ-
ствен процес
се
извършва
без
непосредственото участие
на
човека.
Преминаването
към
този по-висш етап
на
организация
в
електропроиз-
водството стана възможно благодарение
на
бурното
развитие
на
тех-
никата
и на
приложната физика
и
математика.
24.
ТЕХНИКО-ИКОНОМИЧЕСКИ
ПРЕДИМСТВА
НА
АВТОМАТИЗАЦИЯТА
НА
ВОДНОСИЛОВИТЕ
СИСТЕМИ
Въвеждането
на
автоматизацията
при
водносиловите системи
е
въпрос
на
стопанска
изгода.
За
целта
е
необходимо
да се
сравнят средните годиш-
ни
разходи
за
нужните устройства
с
допълнителните предимства
от
тях-
ното
въвеждане.
В
основни линии тези предимства
на
автоматизацията
при
водносиловите системи могат
да се
проявят
в
следните насоки.
^Увеличаване
на
експлоатационната
сигурност
на
водносиловата
система.
Всяка авария
при
водносиловите
системи
води
до
затруднения
в
електроснабдяването,
а
често пъти
и
до
съществени загуби
за
народното
стопанство.
Благодарение
на не-
прекъснатия
контрол
и
работна
готовност,
както
и на
точността
и
сигурността
при
изпълнението
на
възложените функции, автоматичните
устройства реагират
бързо
на
в:яко
нарушение
на
работния режим,
като
го
коригират
с
бързина, невъзможна
при
ръчното
управление.
По
този
начин
наличието
на
автоматика
при
водносиловите системи практи-
чески
изключва грешките
в
експлоатацията, които биха могли
да се до-
пуснат
от
персонала поради умора, недостатъчно
внимание
и
други субек-
тивни
причини.
Така
по
данни
от
СССР аварийността
по
вина
на
персона-
ла при
автоматизираните водни електрически
централи
намалява
до
5—6
пъти
(1 и
11).
Ог
друга
страна,и
надеждността
на
автоматичните устрой-
ства
е
твърде
голяма.
За
сегашното ниво
на
техниката случаите
на
неправилна
работа представляват
не
повече
от 0,1
—0,15%
от
общото
число
на.
автоматично подадените команди [1].
2.
Намаляване
броя
на
експлоатационния персонал
л
подобряване
на
неговите
работни
условия.
Тъй
като
131
при
автоматизираните
водни електрически централи по-голямата част
от
процесите
се
управляват
без
намесата
на
човека, необходимостта
от
експлоатационен
и
особено
от
дежурен
персонал намалява
рязко.
Едновременно
с
това
отпадат
и
редица трудоемки
и
монотонно пов-
тарящи
се
задължения, поради
което
се
постига
и
съществено подо-
бряване
на
работните условия. Досегашната практика
от
автоматизира-
нето
на
водносиловите системи показва,
че при
централи
с
местно
управление
дежурният персонал може
да се
намали средно
с
60
—
70
%>
а
при
телеуправляемите
централи—с
80
—
90%
[1]. Това води
до
сни-
жаване
на
експлоатационните разходи,
а
оттам
и до
намаляване
на
себестойността
на
произвежданата електроенергия.
3.
Увеличаване
на
маневреноспособността
на
съ-
оръженията
към
водносиловата
система.
При
автоматизи-
рането
на
съоръженията
се
избягват непроизводителните престои между
отделните
работни операции, характерни
за
ръчното управление. Про-
цесите
се
извършват непрекъснато съгласно предварително определе-
ната
програма, като всяка следваща
операцта
се
допуска, след
като
се
провери готовността
на
съоръжението
за
нейното изпълнение. Всич-
ко
това води
до
съществено увеличаване
на
скоростта
на
управление-
то.
Много
по-голямата
маневрекоспособност
при
хидротехническите
съоръжения
и
ускоряването
на
пускането
и
спирането
на
машинно-
електрическата част
на
водните електрически
централи
води
до
нама-
ляване
на
загубите
на
вода
и на
резервната мощност
в
енергосистемата.
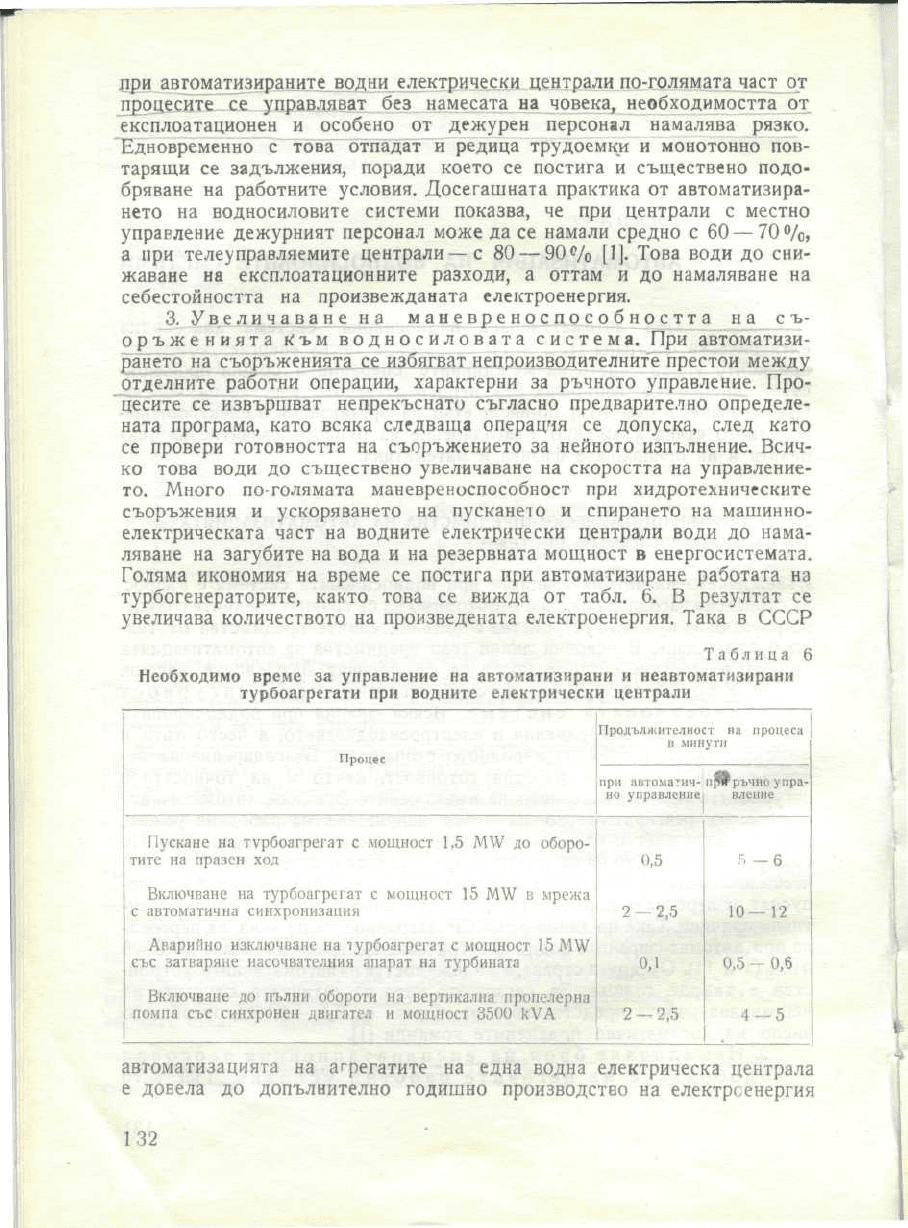
Голяма икономия
на
време
се
постига
при
автоматизиране
работата
на
турбогенераторите, както
това
се
вижда
от
табл.
6. В
резултат
се
увеличава количеството
на
произведената електроенергия. Така
в
СССР
Табл
и ц а 6
Необходимо
време
за
управление
на
автоматизирани
и
неавтоматизирани
турбоагрегати
при
водните
електрически
централи
Процес
Продължителност
на
процеса
н
минути
при
автоматич-
прКгръчно
упра-
но
управление]
нление
Пускане
на
турбоагрегат
с
мощност
1,5
М
Ш
до
оборо-
тите
на
празен
ход
Включване
на
турбоагрегат
с
мощност
15
]УШ
в
мрежа
!
с
автоматична
синхронизация
I
Аварийно
изключване
на
турбоагрегат
с
мощност
15
М\У
със
затваряне
насочвателния
апарат
на
турбината
Включване
до
пълни
обороти
на
вертикална
пропелерна
помпа
със
синхронен
двигател
и
мощност
3500
кУА
'
0,5
2
— 2,5
0,1
2 —
2,5
Я
—6
10—12
0,5
-
0,6
автоматизацията
на
агрегатите
на
една водна електрическа централа
е
довела
до
допълнително годишно производство
на
електроенергия
132
от
10,8
Т
Л
само
от
намаляване
на
времето
за
включване
и
изключване
на
турбогенераторите|1].
Увеличената маневреноспособност
способствува
и
за
осигуряването
на
постоянна
честота
и
напрежение
на
електриче-
ския
ток,
което
е
особено
важно
за
потребителите.
4.
Възможности
за
централизиране
на
управление-
то на
цялата
енерго
си
стема.
Съвременните
водчосилови
системи
работят
в
свързани
езергосисгеми,
които
се
управтяват
от
един цен-
трален
диспечерски пункт.
Автоматизирането
на
водните
електрически
централи
поззоляв!
максимално централизиране
на
всички
контролни
и
управленчески
функции
в
едно
помещение.
По
този
начин
с
голяма
бързина
може
да се
изменя
режимът
на
работа
на
всяка централа
в
зависимост
от
нуждите
на
потреблението
и на
съ:тоянието
на
произ-
водствените мощности.
Въвеждането
на
кибернетичните
устройства
дава
освен
това
възможност
да се
определя
и
оттималното
съчетание
на
наличните централи така,
че да се
получава
енергия
с
минимална
себестойност
за
цялата енергосистема. Тази
голяма
оперативност
при
централизираното
диспечерско
управление
е
осзбе-ю
ценаа
при
аварийни
случаи.
5.
Повишаване
на
коефициента
на
полезното
дей-
ствие
на
водно
силовите
системи
като
цяло.
Това
пре-
димство
е
резултат
на
по-пълното използуване
на
водните количества
и
пада,
на
намаляването
на
непроизводителните престои
и на
оптимал-
ното съчетаване
на
водносиловата
система
с
останалите електропроиз-
водителни
мощности
в
енергосистемата.
Особено ярко
се
проявява
този ефект
на
автоматизацията
при
каскади
от
средно-
и
нисконапорни
водни електрически централи,
при
които мощността
на
всяка една
от
тях
се
обуславя
от
водното количество
и
пада
на
разположените
над и под нея
централи.
Чрез
въвеждането
на
автоматично регулиране
на
съвместната работа
на
всички централи
в
каскадата
може
да се
постигне такова използуване
на
наличния
воден
отток,
при
което
се
получава
максимално количество
електроенергия.
Данните
от
подобни
автоматизирани
нисконапорни каскади показват,
че
коефициентът
на по-
лезното
им
действие
се
повишава средно
с
3—5%
[1 и
11].
6.
Намаляване
на
капиталовложенията
на во д н
осило-
вата
с ис т е м а.
Автоматизирането
на
водните електрически централи
и
хидротехническите съоръжения води
до
намаляване обема
на
строи-
телната част,
тъй
като
отпадат някои помещения
или
получават
по-
малки
размери. Това
се
отнася
за
главното табло, релейната защита,
служебните помещения, жилищните сгради, пазачници
и пр.
Като
се
има
пред
вид,
че
сега
автоматизацията
на
водносиловите системи въз-
лиза
на
около
5°/о
от
стойността
на
основното оборудване
и че
разхо-
дите
за нея се
възвръщат
на
народното стопанство
след
5—8
години,
може
да
се
установи относителният
дял на
намаляването
на
капиталовло-
женията
за
строителната част [1].
133
25.
СТЕПЕН
И
ОБЕМ
НА
АВТОМАТИЗАЦИЯТА
ПРИ
ВОДНОСИЛОВИТЕ
СИСТЕМИ
С
оглед
на
функциите, които изпьлнява, автоматизацията
при
водно-
силовите системи може
да се
степенува
по
възходящ
ред, както
следва.
1.
Телесигнализация.
Това
е
първата
и
най-ниска
степен
на
автошГтизаиия,
при
която
се
контролира състоянието
на
съоръженията
и
на
машинно-електрическата част чрез сигнализиране
на
дости-
гането
на
определен допустим предел
на
дадена
величина
или
за
настъпването
на
авариен случай.
За
целта
се
използуват звукови
или
светлинни
сигнали,
подавани дистанционно
на
комадното
табло.
2.
Телеизмерване.
С
негова помощ
се
следи
за
работата
на
съоръженията
и на
машинно-електрическата част чрез монтираните
на
командното
табло приемателни уреди
на
дистанционна измервателна
апаратура.
По
този
начин
се
контролира
ог
разстояние положението
на
водните нива
и
на
затворните органи, следи
се
налягането, темпе-
ратурата, водните количества
и т. н. На
основа
на
тези данни
дежур-
ният
може
да
коригира своевременно режима
на
работа
било чрез
не-
посредствено задвижване
на
регулиращите органи, било чрез телефон-
ни
нареждания
до
съответните надзорници
на
съоръженията.
3*-Т-^л_е_у
правл
е н
и
е.
Този способ
на
управление
представлява
преход
към
най-висшата
степен
на
автоматизация
и е
комбинация
между
телеизмерването
и
командуването
от
разстояние, като
връзката
между тези
две
автоматични операции
се
осъществява
от
човека.
При
телеуправлението работният процес
на
съоръженията
и на
машинно-
електрическата част
се
регулира дистанционно
от
дежурния персонал
въз
основа
на
телеметричните данни
за
тяхното състояние. Така
на-
пример
чрез
монтирания
върху
централното
табло
дистанционен
водо-
мер
се
следи
за
постъпващите
във
водовземането водни количества.
На
основата
на
тези
данни
дежурният регулира техния размер
с
оглед
на
потреблението
от
командното помещение чрез дистанционно задвиж-
ване
на
затворните органи
при
водовземното съоръжение.
4.
Пълна
автоматизация.
При нея
връзката между
телеиз-
мерването
и
дистанционното командуване
на
работния режим
не се
осъществява
от
човека,
а от
кибернетично устройство, наречено авто-
оператор,
работещо
по
определена програма.
Ако
пълната автоматиза-
ция
се
приложи
по
отношение
на
предишния пример,
то
данните
от
дистанционния
водомер
ще
постъпват
в
автооператора, който
въз
основа
на
заложената програма
ще
задвижва дистанционно затвор-
ните органи
до
пропускането
на
определените водни количества.
Съвременното състояние
на
кибернетиката позволява вече
да се
кон-
струират
и
автооператори, които
са в
състояние
да
определят
въз
основа
на
телеметричните данни оптималния режим
на
работа,
ако за
такъв
въобще
има
място. Управлението
на
работния процес
се
извър-
шва от
автооператора
на
основа
на
получените оптимални параметри.
Засега
автоматизацията
при
водносиловите системи
е
навлязла
предимно
при
регулирането
на
работния режим
на
машинно-електри-
ческата част
и
отчасти
на
хидротехническите съоръжения.
134
С
оглед
на
обема
на
използуваните
автоматични
устройства
се
различават
следните видове автоматични водни електрически
централи:
1.
Автоматични
водни
електрически
ц е н т р а л и с
местно
дистанционно
управление.
Характерен
белег
на
този
вид
централи
е
съсредоточаването
на
управлението
и
контролът
за
състоянието
на
основното електрическо
и
механично оборудване
в
командното
помещение,
където
единствено
се
осъществява
дежурство.
Нормално автоматизацията
се
разпростира
върху
пускането
и
спиране-
то на
агрегатите, което
се
извършва чрез натискане
на
копче
върху
пулта
за
управление,
върху
отварянето
и
затварянето
на
шибърите
пред турбините
или в
началото
на
напорния
тръбопровод,
при
който
се
предвижда напълно автоматично спиране
на
водата
в
случай
на
спукване
на
тръбата.
Освен това
при
този
тип
централи
се
изисква
дистанционно
предаване
в
командното помещение
и
положението
на
работните
затворни органи
при
входното съоръжение, както
и на
вод-
ното
ниво
в
изравнителите, водохранилищата, водните камери
или
кули
и
в
долната вада.
В
някои случаи
при
централите
с
местно
управление
се
предвижда дистанционно командуване
ог
машинната зала
на
затвор-
ните
органи
при
водовземането,
които нормално
са
отдалечени
на
доста голямо разстояние.
В
такъв
случай обаче трябва
да се
осигури
възможност
за
местно управление
в
случай
на
повреда
на
съобщител-
ната
връзка
между
централата
и
водовземането.
2.
Телеуправляеми
водни
електрически
централи.
При
тях
липсва постоянен обслужващ
персонал,
като работните
про-
цеси
се
управляват
от
командното
помещение
на
някоя по-голяма
централа
във
водносиловата система
или
направо
от
централния
ди-
спечерски
пункт
на
енергосистемата.
РГато
пример
за
такава централа
у нас
може
да
послужи
стрсената
през
1940
год.
ВЕЦ
„Каменица",
която
се
управлява
от ВЕЦ
„Пастра",
разположена
на
около
1,2
1ш
от
нея. Телеуправлението
при
този
тип
водни електрически централи
се
разпростира
върху
следните
операции
:
пускане
и
спиране
на
агре-
гатите, регулиране
на
товара,
сигнализиране
за
състоянието
на
агре-
гатите, измерване
на
мощността,
напрежението
и
честотата
на
електрическия
ток, както
и на
горното
и
долното водно ниво.
При
по-големи
телеуправляеми
водни електрически централи
се
оставя
на-
мален
състав дежурен персонал, който
има
предимно контролни функции
върху
действието
на
автоматиката.
3.
Напълно автоматични водни електрически
цент
рали.
Те се
характеризират
с
това,
че
пускането, спирането
и
регулирането
на
всички
необходими
изменения
на
експлоатационния
режим, както
и
защитата
при
аварии
се
извършва автоматически
с
помощта
на
авто-
оператор
и
чрез телеуправление
от
централния диспечерски пункт
на
енергосистемата.
Засега
такъв
вид
автоматизация
се
прилага само
при
по-малки
водни електрически централи
с
един
или два
агрегата.
При
тях се
предвижда
по
един квалифициран надзорник,
работещ
на
домаш-
но
дежурство.
При
аварии
или
нарушаване
на
нормалния
работен
режим
в
дома
на
надзорника
се
подават сигнали.
В
такъв
случай
той
отстранява по-малките дефекти
или
търси
помощта
на
ремонтната
135
група
при
по-сериозни повреди. Състоянието
на
автоматичните устрой-
ства
и на
основното
оборудване
се
контролира чрез периодични
огледи
от
комисия.
26.
ОСНОВНА
АПАРАТУРА
ПРИ
АВТОМАТИЧНОТО
УПРАВЛЕНИЕ
НА
ВОДНИТЕ
ЕЛЕКТРИЧЕСКИ
ЦЕНТРАЛИ
Като
се
изключат
авгооператорите,
които
са
сложни кибернетични
устройства,
при.автоматизацията
на
водните електрически централи
се
използуват сравнително прости апарати, основани
на
механичен,
хидра-
вличен
или
електрически
принцип.
Тъй
като тяхното разнообразие
е
твърде
голямо
и
конструирането,
производството
и
експлоатацията
им
не
е
задача
на
хидротехника,
тук ще
бъдат
разгледани
в
принципна
форма само основните
и
най-разпространени апарати.
Устройствата
за
управление, регулиране
и
контрол,
които
се из-
ползуват
при
автоматизирането
на
водносилозите системи, могат
да
се
разделят
на
няколко групи.
1.
Апарати, които реагират
при
аварийни
случаи
или при
отклоне-
ния
от
нормалния
работен режим, като подават сигнал
или
съответни
команди
за
спазване
на
установения
му
ход.
Това
устройство
се на-
рича
реле,
В
зависимост
от
предназначението
си то
може
да
бъде
защитно
или
управлява
щ о.
2.
Апарати, които регулират
тока
за
задвижване
на
механизмите,
изпълняващи
командите
на
релето. Нуждата
от тях
възниква най-
често поради
обстоятелството,
че
силата
на
електрическия ток,
която
може
да
бъде
пропусната
от
релето,
не е
достатъчна
за
работата
на
изпълнителните
механизми.
Основният
апарат
от
тази група
е
контак-
торът,
който
може
да
работи
с
постоянен
или
променлив ток.
3.
Апарати,
чрез които
се
въздействува
върху
веригата
на
глав-
ния
оперативен
електрически
ток,
наречени
^ом
а н
л,
о а п а р а
ти.
По
своята конструкция
те се
разделят
на
ръч!Ги~(бутони,
'презключвате-
ли,
серийни
ключове
и
пр.),
електродвигатели
и,
задвижвани
от
електродвигател,
и
механични,
привеждани
в
дзижение
от
управляе-
мото съоръжение.
Могат
да
бъдат
задействували
както
непосредстве-
но,
така
и
дистанционно.
По
своите функции
командоапаратите
в
мно-
го
случаи
са
близки
до
контакторите.
Различават
се от тях по
тоза,
че
позволяват
много
по-сложни
превключвания
в
главната оператив-
на
верига.
4.
Устройства,
чрез които
се
изпълняват подадените
от
релето
команди,
наречени
помощни
и
изпълнителни
механизми.
Те
биват електрически,
механични
или
хидравлични
в
зависимост
от
вида
ма
енергията, която
се
използува
за
задвижването
им.
Релето
е
основният
елемент
на
автоматичното
управление
и
авто-
матичната защита
на
съоръженията. Основната
му
съставна част
е
един
измервателен
елемент,
кой
го
следи непрекъснато със-
тоянието
на
управлявания обект.
В
зависимост
от
измерваните величини,
които могат
да
бъдат
електрически (ток, напрежение, мощност, често-
136
та) и
неелектрически
(налягане, скорост,
дебит,
ниво, температура, вре-
ме и
пр.),
се
различава както измервателният елемент, така
и
конструк-
цията
на
релето.
Втората основна съставна част
е
контактното
устройство,
което
се
задвижва
от
измервателния елемент
при оп-
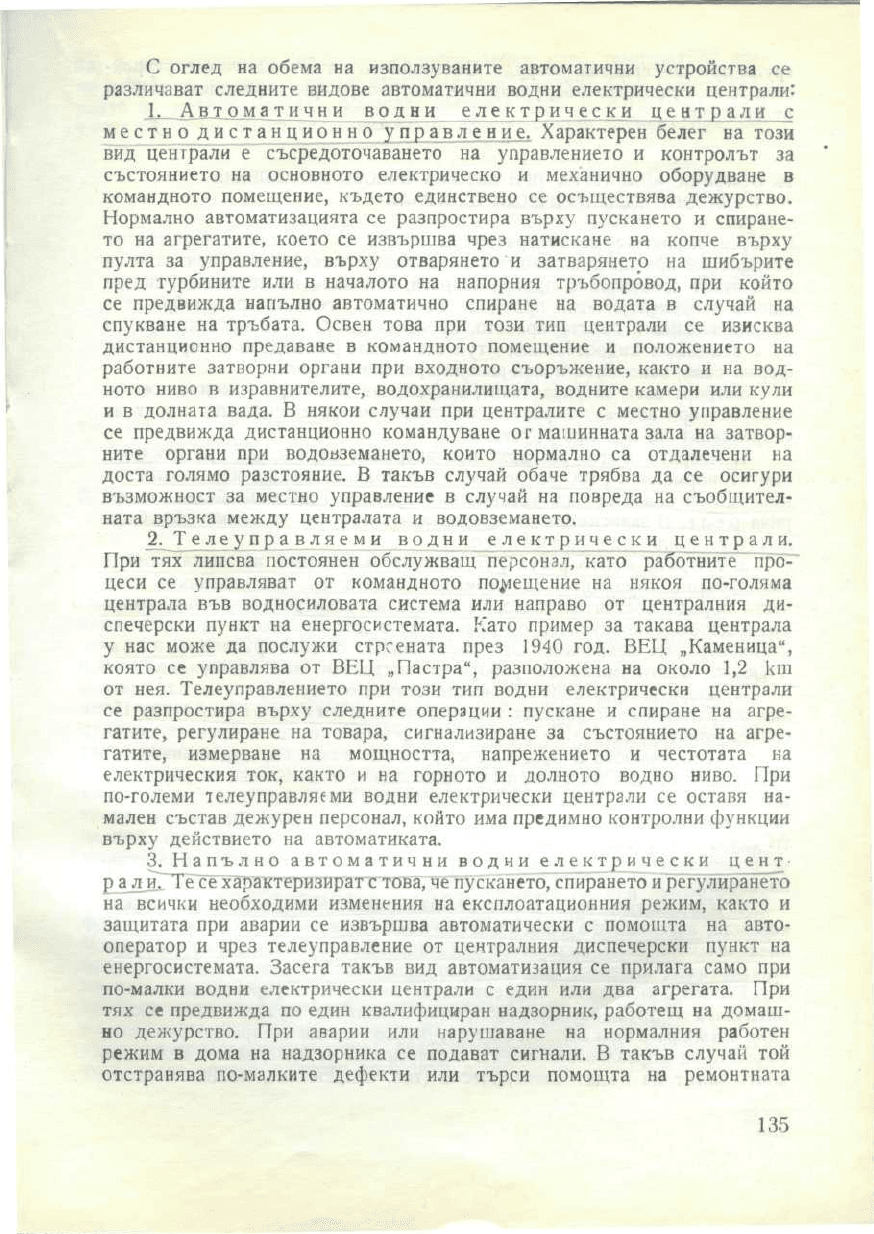
Фиг.
100. Реле
за
налягане
с
манометър
7
—
метална
тръба
с
елиптично
на-
пречно сечение
; 2 —
контактна
част
на
релето
; 3 —
контактен
лост
—
стрелка
; 4 —
скала
на
манометъра
—
реле
ределен размер
на
измерваната величина
и
предава командата
до
упра-
влявания
обект
по
електрически път.
Между
многото видове релета
ще
бъдат
разгледани
най-простите
и
най-често прилаганите.
1.
Реле
за
налягане.
То
реагира
при
отклоняване
на
наляга-
нето
в
течна
или
газообразна
среда
от
определена, предварително
за-
дадена стойност. Като измервателен орган най-често
се
използува
ме-
тален манометър
или
деформираща
се
еластична мембрана.
В
първия
случай
(фиг. 100) промяната
на
налягането предизвиква деформиране
на
металната
тръба
в
манометъра
и
задвижва свързания
със
стрелка-
та
контактен електрически мост. Когато налягането превиши
или
спад-
не
под
определената стойност, сключената чрез контакта електрическа
верига
задействува сигнал
или
задвижва съответни двигателни устрой-
ства, които възстановяват първоначалното
положение.
2.
Реле
за
скорост
и
дебит.
Прилага
се при
движещи
се
флуиди
(газове
и
течности)
за
регулиране
на
скоростта
и
дебита
им.
В
зависимост
от
използувания измервателен орган
са
познати голям
брой релета
от
този тип. Като пример
ще
бъде
дадено реле, изграде-
но
на
хидродинамичен
принцип
(фиг.
101).
С
помощта
на
вградена
в
тръбопровода диафрагма
се
изменя налягането
на
потока
във
функция
от
скоростта, респективно дебита
му.
Поради допълнителните съпро-
тивления
при
стеснението пред
диафрагмата
налягането
се
повишава,
и
то
толкова повече, колкото по-голяма
е
скоростта. Разликата
в
наля-
137

гането
пред
и
след
стеснението
се
предава чрез тръбички
върху
ме-
тални
вълнообразно оформени елементи, които задвижват контактен
лост, включващ електрическата
сигнална
система
или
органите
за уп-
равление.
Фиг.
101.
Реле
за
скорост
и
дебит
/
—
контактно устройство
; 2
вълнообраз-
ни
метални елементи
; 3 - -
сьединителнп
тръбички
; 4
диафрагма
; 5 —
тръбопровод;
6 —
дросели
устройство
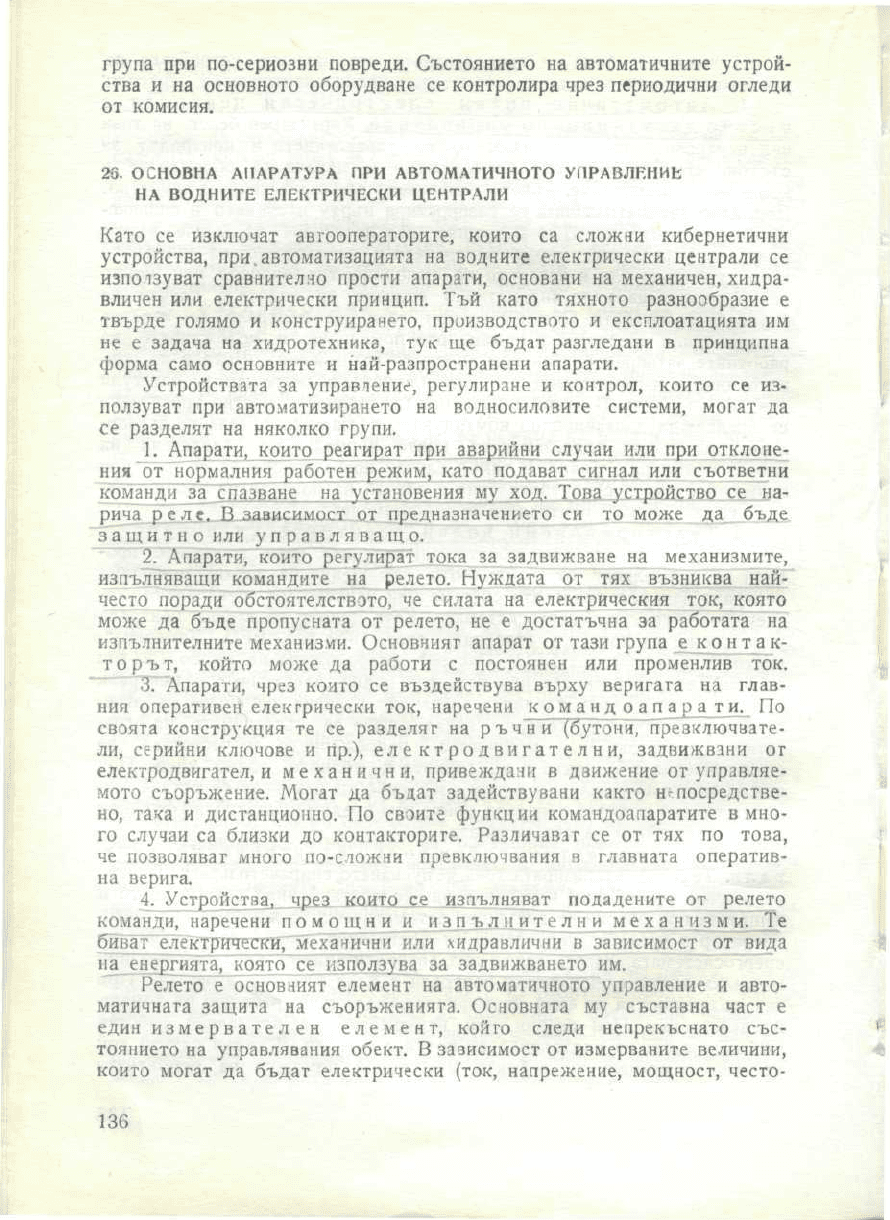
3.
Реле
за
ниво.
Регулира положението
на
водното ниво
или
нивото
на
течности,
когато
то
превиши
или
спадне
под
определена
стойност. Като
регистриращ
орган
най-често
се
използува плувак
(фиг.
102),
който,
плавайки
в
течността, следи нейното ниво.
Към
него
е
прикрепен
контактен метален диск, който включва
или
изключва
електрическата
верига
на
сигналната
инсталация
или на
органите
за
управление.
При
това горните контактни
пластинки
регулират макси-
мално допустимото ниво,
а
долните
—
минималното.
Като
пример
за
приложението
на
този
тип
реле може
да се
посочи
устройството
за
резервю
смазване
на
лагера
на
генератора
(фиг.
103),
включващо
се
автоматично
в
действие, когато основното устройство, задвижвано
от
генераторния
вал,
се
повреди.
4.
Реле
за
температура.
Прглага
се за
регулиране
на
тем-
пературата
на
средата,
в
която
то е
вградено.
В
зависимост
от
изпол-
зувания
измервателен орган
са
известни голям брой
различни
по-свое-
то
устройство температурни релета. Едно
от
най-простите
и
същевре-
менно
най-надеждните
е
изградено
на
основата
на
биметалния
термо-
метър.
Деформирането
на
биметалната
пластинка
под
влияние
на
тем-
пературата включва
или
изключва аналогично
на
релето
за
налягане
с
манометър електрическия контактен мост (фиг. 104).
5.
Реле
за
обороти.
То
влиза
в
действие
при
определен брой
на
оборотите
на
дадена машина. Нормално релето
за
обороти
е
изгра-
138
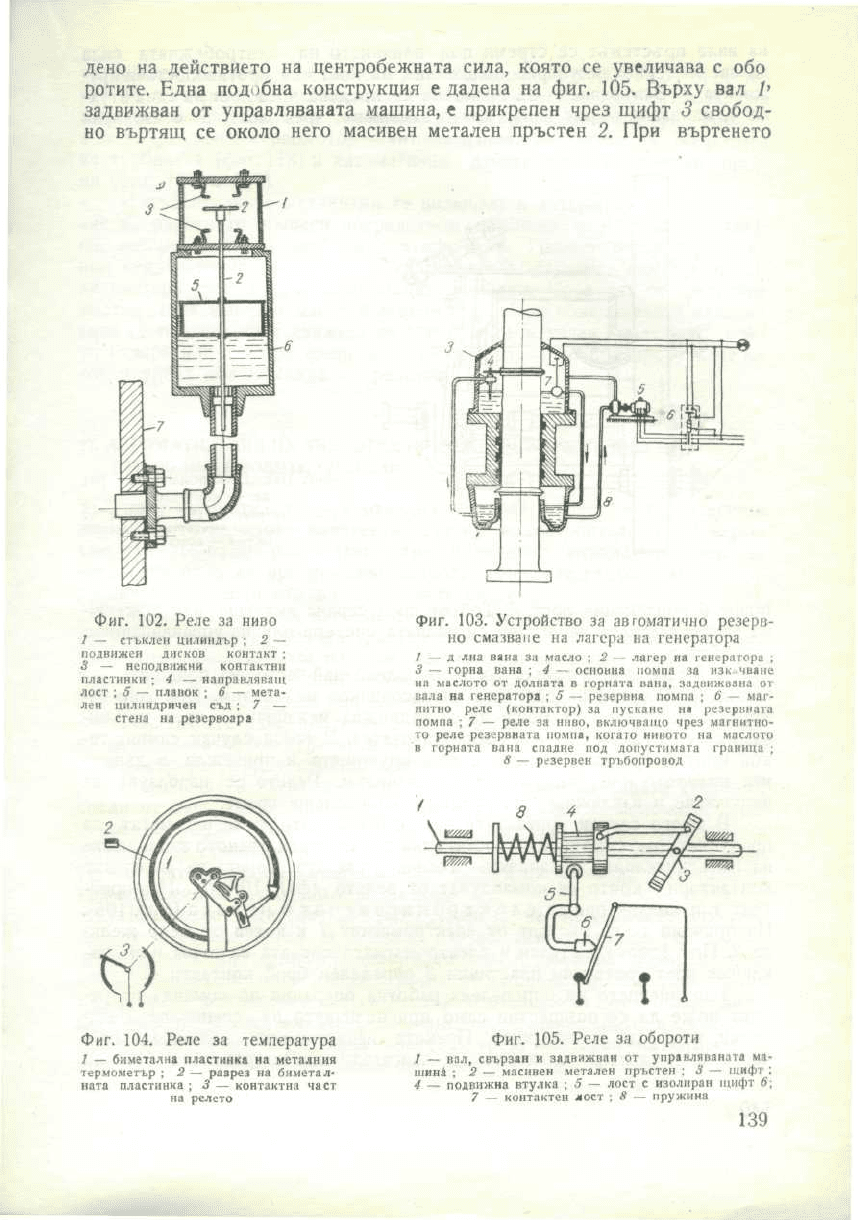
дено
на
действието
на
центробежната сила, която
се
увеличава
с обо
ротите. Една подобна конструкция
е
дадена
на
фиг. 105.
Върху
вал
I
1
задвижван
от
управляваната машина,
е
прикрепен чрез щифт
3
свобод-
но
въртящ
се
около него масивен метален пръстен
2. При
въртенето
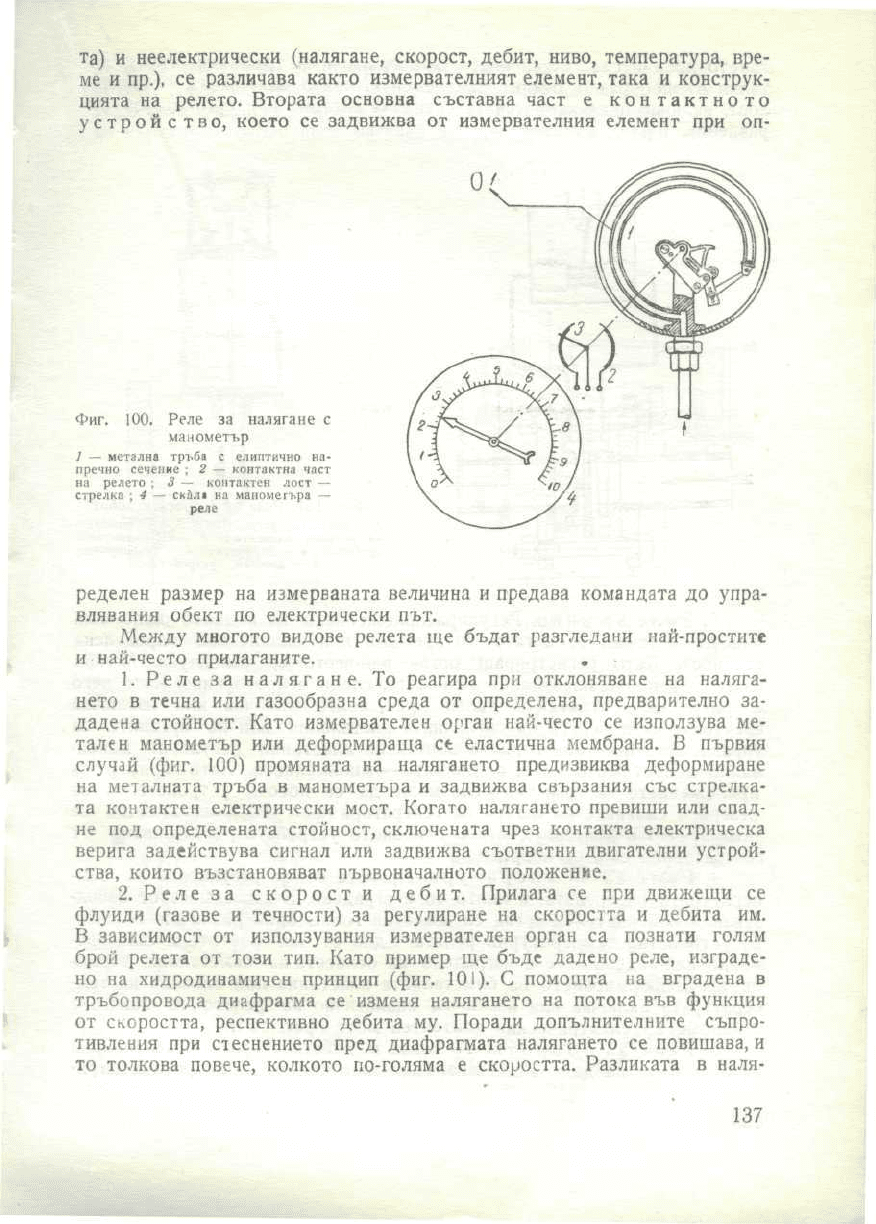
Фиг.
102. Реле
за
ниво
/
—
стъклен цилиндър
; 2 —
подвижен дисков
контлкт
;
З
--
неподвижни контактни
пластинки
; 4 —
направляващ
лост
; 5 —
плавок
; 6 —
мета-
лен
цилиндричен
съд ; 7 -
стена
на
резервоара
Фиг.
103. Устройство
за
автоматично
резерв-
но
смазваме
на
лагера
на
генератора
7
— д
л.на вана
за
масло
; 2 —
лагер
на
генератора
;
З
—
горна вана
; 4 —
основна
помпа
за
изк..чване
на
маслото
от
долната
в
горната вана, задвижвана
от
вала
на
генератора
; 5 —
резервна помпа
;
6'
—
маг-
нитно
реле
(контактор)
за
пускане
на
резервната
помпа
; 7 —
реле
за
ниво, включващо
чрез
магнитно-
то
реле
резервната помпа, когато нивото
на
маслото
в
горната вана спадне
под
допустимата граница
;
8
—
резервен тръбопровод
Фиг.
104.
Реле
за
температура
1
—
биметална
пластинка
на
металния
термометър
; 2 —
разрез
на
биметал-
ната
пластинка
;
3 —
контактна
част
на
релето
Фиг.
105. Реле
за
обороти
/
—
вял,
свързан
и
задвижван
от
управляваната
ма-
шина
;
2 —
масивен
метален
пръстен
; 3 —
щифт
;
4 —
подвижна втулка
;
5 —
лост
с
изолиран
щифт
6;
7 —
контактен
лост
; 8 —
пружина
139
на
вала
пръстенът
се
стреми
под
влиянието
на
центробежната сила
да
заеме
.перпендикулярно
положение,
на
което
се
противопоставя пру-
жината
8.
Завъртането
на
пръстена
се
предава чрез лост
на
една втул-
ка
4,
нанизана
върху
вала, която задвижва чрез
лост
5 с
изолиран
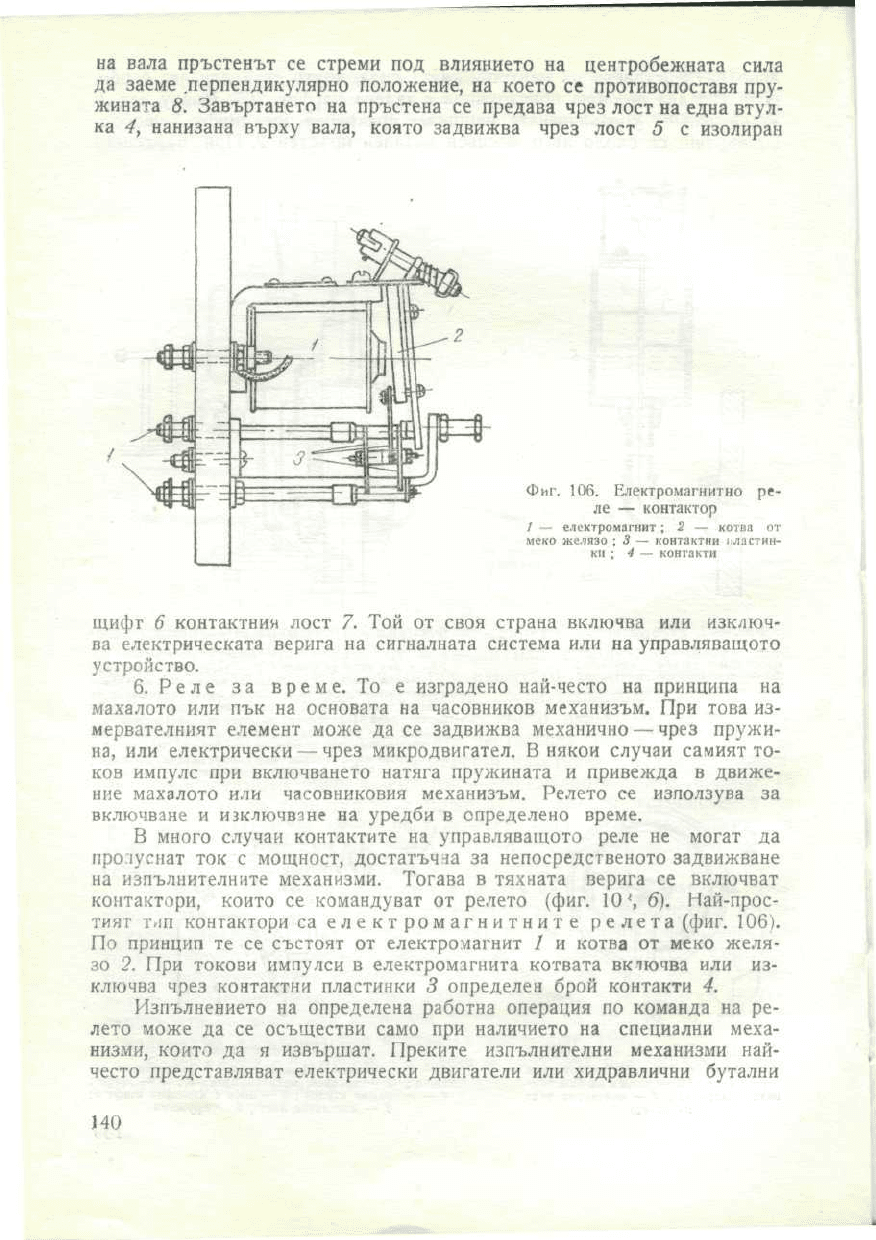
Фиг.
106.
Електромагнитно
ре-
ле
—
контактор
/
—
електромагнит
; 2 —
котва
от
меко желязо
; 3 —
контактни
пластин-
ки
; 4 —
контакти
щифт
6
контактния
лост
7. Той от
своя страна включва
или
изключ-
ва
електрическата верига
на
сигналната система
или на
управляващото
устройство.
6.
Реле
за
време.
То е
изградено най-често
на
принципа
на
махалото
или пък на
основата
на
часовников механизъм.
При
това
из-
мервателният елемент може
да се
задвижва
механично
—
чрез пружи-
на,
или
електрически
—
чрез
микродвигател.
В
някои случаи самият
то-
ков
импулс
при
включването натяга пружината
и
привежда
в
движе-
ние
махалото
или
часовниковия механизъм.
Релето
се
използува
за
включване
и
изключване
на
уредби
в
определено
време.
В
много случаи контактите
на
управляващото
реле
не
могат
да
пролуснат
ток с
мощност,
достатъчна
за
непосредственото задвижване
на
изпълнителните
механизми. Тогава
в
тяхната верига
се
включват
контактори,
които
се
командуват
от
релето
(фиг.
1СН,
6).
Най-прос-
тият
1мп
контактори
са
електромагнитните
релета
(фиг. 106).
По
принцип
те се
състоят
от
електромагнит
/ и
котва
от
меко
желя-
зо 2. При
токови
импулси
в
електромагнита котвата
вкточва
или из-
ключва
чрез
контактни
пластинки
3
определен брой контакти
4.
Изпълнението
на
определена работна операция
по
команда
на ре-
лето може
да се
осъществи само
при
наличието
на
специални меха-
низми,
които
да я
извършат. Преките изпълнителни механизми най-
често представляват електрически двигатели
или
хидравлични бутални
140