Gockenbach M.S. Partial Differential Equations. Analytical and Numerical Methods
Подождите немного. Документ загружается.

458
Chapter
9.
More about Fourier
series
IB VP
The
question
we
wish
to
answer
is:
What
is the
lowest frequency
at
which
the
membrane will resonate? This
could
be an
important consideration
in
designing
a
device
that contained such
a
membrane.
The key
point
is
that,
if
we
knew
the
eigenvalues
and
eigenvectors
of
the
nega-
tive Laplacian
on fi
(subject
to
Dirichlet conditions), then
we
could
solve
the
IBVP
just
as in the
Fourier series method. Suppose
the
eigenpairs
are
Then
we can
write
the
solution
w(x,£)
as
Substituting into
the PDE
yields
and
so
a
n
(t)
satisfies
Therefore,
with
the
coefficients
b
n
and
c
n
determined
by the
initial conditions.
Therefore,
the
fundamental
frequency—the
smallest natural
frequency—of
the
membrane
is
cx/V^TT).
This
example
shows
that
we
would
gain
some useful information
by
computing
the
smallest eigenvalue
of the
operator
on
£).
We
will revisit
this
example
in
Section
10.4, where
we use finite
element methods
to
estimate
the
smallest eigenvalue
of
various domains.
Exercises
1.
Prove
that
the
operator
K
defined above
is
symmetric.
458
Chapter
9.
More about Fourier series
IBVP
a
2
u 2
at
2
-
c
Au
= 0, x E
n,
t > 0,
u(x,O) = ¢(x), x E
n,
au
at (x,O) = ,),(x), x E
n,
u(x,
t) = 0, x E
an,
t >
O.
(9.28)
The question
we
wish to answer is: What is the lowest frequency
at
which the
membrane will resonate? This could
be
an important consideration in designing a
device that contained such a membrane.
The key point is that,
if
we
knew the eigenvalues and eigenvectors
of
the nega-
tive Laplacian on
n (subject to Dirichlet conditions), then
we
could solve the
IBVP
just
as
in the Fourier series method. Suppose the eigenpairs
are
An,
'l/Jn(x)
, n =
1,2,3,
....
Then
we
can write the solution
u(x,
t)
as
00
u(x,
t) =
l:
an (t)'l/Jn(x).
n=l
Substituting into the
PDE
yields
and
so
an(t) satisfies
Therefore,
an(t)
= b
n
cos
(cAt)
+ C
n
sin
(cAt),
with the coefficients b
n
and
en
determined
by
the initial conditions. Therefore,
the fundamental
frequency-the
smallest natural
frequency-of
the membrane is
cv'):; / (2n).
This example shows
that
we would gain some useful information by computing
the
smallest eigenvalue of
the
operator
on
n.
We
will revisit this example
in
Section
lOA, where
we
use finite element methods
to
estimate
the
smallest eigenvalue
of
various domains.
Exercises
1. Prove
that
the
operator
K defined above is symmetric.
9.8.
Suggestions
for
further reading
459
2.
Let the
eigenvalues
and
eigenvectors
of
KD
be
as in the
text.
Suppose
that
u
€
Of,(17)
is
represented
in a
generalized Fourier
Explain
why the
generalized Fourier series
of
KDU
is
equal
to
3.
Consider
an
iron
plate
occupying
a
domain
£)
in R
2
.
Suppose
that
the
plate
is
heated
to a
constant
5
degrees Celsius,
the top and
bottom
of the
plate
are
perfectly
insulated,
and the
edges
of the
plate
are fixed at 0
degrees.
Let
w(x,
t) be the
temperature
at x 6
fJ
after
t
seconds. Using
the first
eigenvalue
and
eigenfunction
of the
negative
Laplacian
on 0,
give
a
simple estimate
of
w(x,£)
that
is
valid
for
large
t.
What must
be
true
in
order
that
a
single
eigenpair
suffices
to
define
a
good estimate? (The physical properties
of
iron
are p =
7.88g/cm
3
,
c =
0.437
J/(gK),
AC
=
0.836
W/(cmK).)
9.8
Suggestions
for
further reading
The
books cited
in
Section
5.8 as
dealing with Fourier series
all
present
the
con-
vergence theory. More specialized books, both with
a
wealth
of
information
about
Fourier series
and
other aspects
of
Fourier analysis,
are
Kammler [28]
and
Folland
[15].
Folland's book
is
classical
in
nature, while Kammler delves into
a
number
of
applications
of
modern
interest.
Briggs
and
Henson
[7]
gives
a
comprehensive introduction
to the
discrete
Fourier transform
and
covers some applications, while
Van
Loan [50] provides
an
in-depth treatment
of the
mathematics
of the
fast Fourier transform. Other
texts
that
explain
the FFT
algorithm include Walker [51]
and
Brigham
[8].
series as follows:
9.8. Suggestions for further reading
459
2.
Let
the
eigenvalues and eigenvectors of
KD
be
.An,
'¢n(x),
n=1,2,3,
...
,
as in the text. Suppose
that
u E
C1(0)
is
represented in a generalized Fourier
series as follows:
00
U(X)
= L an'¢n(x).
n=l
Explain why
the
generalized Fourier series of
KDu
is
equal
to
00
L
.An
an
'¢n
(x).
n=l
3.
Consider an iron plate occupying a domain 0 in R2. Suppose
that
the
plate
is
heated to a constant 5 degrees Celsius, the top and
bottom
of
the
plate
are perfectly insulated, and the edges of
the
plate are fixed
at
0 degrees. Let
u(x,
t)
be
the
temperature
at
x E 0 after t seconds. Using the first eigenvalue
and eigenfunction of the negative Laplacian on
0,
give a simple estimate of
u(x, t)
that
is
valid for large t.
What
must be
true
in order
that
a single
eigenpair suffices
to
define a good estimate? (The physical properties of iron
are
p = 7.88 g/cm3, c = 0.437
J/(gK),
,..
= 0.836W
/(cm
K).)
9.8 Suggestions
for
further reading
The books cited in Section 5.8 as dealing with Fourier series all present the con-
vergence theory. More specialized books, both with a wealth of information about
Fourier series and other aspects of Fourier analysis, are Kammler
[28)
and Folland
[15].
Folland's book
is
classical in nature, while Kammler delves into a number of
applications of modern interest.
Briggs and Henson
[7]
gives a comprehensive introduction
to
the discrete
Fourier transform and covers some applications, while Van Loan
[50)
provides an
in-depth treatment of the mathematics of
the
fast Fourier transform. Other texts
that
explain the
FFT
algorithm include Walker
[51]
and
Brigham
[8].

This page intentionally left blank
This page intentionally left blank
Chapter
10
More
about finite element
In
this chapter,
we
will
look more deeply into
finite
element methods
for
solving
steady-state
BVPs.
Finite
element methods
form
a
vast
area,
and
even
by the end
of
this chapter,
we
will
have only scratched
the
surface.
Our
goal
is
modest:
We
wish
to
give
the
reader
a
better
idea
of how
finite
element methods
are
implemented
in
practice,
and
also
to
give
an
overview
of the
convergence theory.
The
main
tasks
involved
in
applying
the
finite
element method
are
•
Defining
a
mesh
on the
computational domain.
•
Computing
the
stiffness
matrix
K and the
load vector
f.
•
Solving
the
finite
element equation
Ku =
f.
We
will
mostly ignore
the first
question, except
to
provide examples
for
simple
do-
mains. Mesh generation
is an
area
of
study
in its own
right,
and
delving into
this
subject
is
beyond
the
scope
of
this book.
We
begin
by
addressing issues involved
in
computing
the
stiffness
matrix
and
load vector, including
data
structures
for
representing
and
manipulating
the
mesh.
We
will concentrate
on
two-dimensional
problems, triangular meshes,
and
piecewise linear
finite
elements,
as
these
are
suf-
ficient to
illustrate
the
main ideas. Next,
in
Section 10.2,
we
discuss methods
for
solving
the finite
element equation
Ku =
f,
specifically,
on
algorithms
for
taking
advantage
of the
sparsity
of
this system
of
equations.
In
Section 10.3,
we
provide
a
brief
outline
of the
convergence theory
for
Galerkin
finite
element methods. Finally,
we
close
the
book with
a
discussion
of finite
element methods
for
solving eigenvalue
problems, such
as
those suggested
in
Section 9.7.
10.1
Implementation
of
finite
element methods
There
are
several issues
that
must
be
resolved
in
order
to
efficiently
implement
the
finite
element method
in a
computer program, including
•
Data
structures
for
representation
of the
mesh.
461
methods
Chapter 10
about finite element
In this chapter,
we
will look more deeply into finite element methods for solving
steady-state BVPs. Finite element methods form a vast area, and even by the end
of this chapter,
we
will have only scratched the surface. Our goal
is
modest:
We
wish
to
give the reader a
better
idea of how finite element methods are implemented
in practice, and also
to
give
an
overview of the convergence theory.
The main tasks involved in applying the finite element method are
• Defining a mesh on
the
computational domain.
• Computing the stiffness matrix K and the load vector
f.
• Solving the finite element equation
Ku
=
f.
We
will mostly ignore
the
first question, except to provide examples for simple do-
mains. Mesh generation
is
an area of study in its own right, and delving into this
subject
is
beyond the scope of this book.
We
begin by addressing issues involved
in computing the stiffness matrix
and
load vector, including
data
structures for
representing and manipulating the mesh.
We
will concentrate on two-dimensional
problems, triangular meshes,
and
piecewise linear finite elements, as these are suf-
ficient
to
illustrate
the
main ideas. Next, in Section 10.2,
we
discuss methods for
solving
the
finite element equation
Ku
= f, specifically, on algorithms for taking
advantage of
the
sparsity of this system of equations. In Section 10.3,
we
provide a
brief outline of
the
convergence theory for Galerkin finite element methods. Finally,
we
close
the
book with a discussion of finite element methods for solving eigenvalue
problems, such as those suggested in Section 9.7.
10.1 Implementation
of
finite element methods
There are several issues
that
must be resolved in order to efficiently implement the
finite element method in a computer program, including
•
Data
structures for representation of the mesh.
461
462
Chapter
10.
More about
finite
element methods
•
Efficient
computation
of the
various integrals
that
define
the
entries
in the
stiffness
matrix
and
load vector.
•
Algorithms
for
assembling
the
stiffness
matrix
and the
load vector.
We
will
now
discuss these issues.
10.1.1
Describing
a
triangulation
Before
we can
describe
data
structures
and
algorithms,
we
must develop
notation
for
the
computational mesh. First
of
all,
we
will
assume
that
the
domain
0 on
which
the BVP is
posed
is a
bounded polygonal domain
in R
2
, so
that
it can be
triangulated.
75
Let
be the
collection
of
triangles
in the
mesh under consideration,
and let
be the set of
nodes
of the
triangles
in
Th-
(Standard notation
in finite
element
methods
labels
each mesh with
/i,
the
length
of the
longest side
of any
triangle
in
the
mesh. Similarly,
the
space
of
piecewise linear
functions
relative
to
that
mesh
is
denoted
Vh, and an
arbitrary element
of
Vh
as
Vh-
We
will
now
adopt
this
standard
notation.)
To
make this discussion
as
concrete
as
possible,
we
will
use as an
example
a
regular triangular mesh,
defined
on the
unit square, consisting
of 32
triangles
and
25
nodes. This mesh
is
shown
in
Figure 10.1.
In
order
to
perform
the
necessary calculations,
we
must know which nodes
are
associated with which triangles.
Of
course, each triangle
has
three nodes;
we
need
to
know
the
indices
of
these three nodes
in the
list
HI,
112,..
-,
HM-
We
define
the
mapping
e
by the
property
that
the
nodes
of
triangle
Tj
are
n
e
(
i;1
),
n
e
(j
;2
),
n
e
(i,3)
•
(So
e is a
function
of two
variables;
the first
must take
an
integral value
from
1 to
L,
and the
second
one of the
integers
1,2,3.)
In
our
sample mesh, there
are 32
triangles
(L =
32),
and
they
are
enumerated
as in
Figure 10.2.
The M = 25
nodes
are
enumerated
as
shown
in
Figure 10.3, which
explicitly shows
the
indices
of the
nodes belonging
to
each triangle.
For
example,
expressing
the
fact
that
the
vertices
of
triangle
10 are
nodes
6, 7, and 12.
Each
of the
standard
basis
functions
for the
space
of
continuous piecewise
linear
functions
corresponds
to one
node
in the
triangulation.
The
basis
functions
75
If
the
domain
fi has
curved boundaries, then,
in the
context
of
piecewise
linear
finite
elements,
the
boundary must
be
approximated
by a
polygonal
curve
made
up of
edges
of
triangles. This
introduces
an
additional error into
the
approximation. When
using
higher-order
finite
elements,
for
example,
piecewise
quadratic
or
piecewise
cubic
functions,
then
it is
straightforward
to
approximate
the
boundary
by a
piecewise
polynomial curve
of the
same degree
as is
used
for the finite
element
functions.
This technique
is
called
the
isoparametric
method,
and it
leads
to a
significant
reduction
in
the
error.
We
will
ignore
all
such questions
here
by
restricting ourselves
to
polygonal domains.
462
Chapter 10.
More
about finite element methods
• Efficient computation of
the
various integrals
that
define
the
entries in the
stiffness matrix
and
load vector.
• Algorithms for assembling
the
stiffness matrix
and
the load vector.
We
will now discuss these issues.
10.1.1
Describing
a triangulation
Before
we
can describe
data
structures and algorithms,
we
must develop notation
for
the
computational mesh. First of all,
we
will assume
that
the
domain n on
which
the
BVP
is
posed
is
a bounded polygonal domain in R2,
so
that
it can be
triangulated.
75
Let
Th
= {Ti : i =
1,2,
...
,
L}
be the collection of triangles in the mesh under consideration,
and
let
Nh
=
{llj
: j =
I,2,
...
,M}
be
the
set of nodes of
the
triangles in
Th.
(Standard notation in finite element
methods labels each mesh with
h,
the
length of the longest side of any triangle in
the
mesh. Similarly,
the
space of piecewise linear functions relative
to
that
mesh
is
denoted
Vh,
and
an arbitrary element of
Vh
as
Vh.
We
will now adopt this standard
notation.)
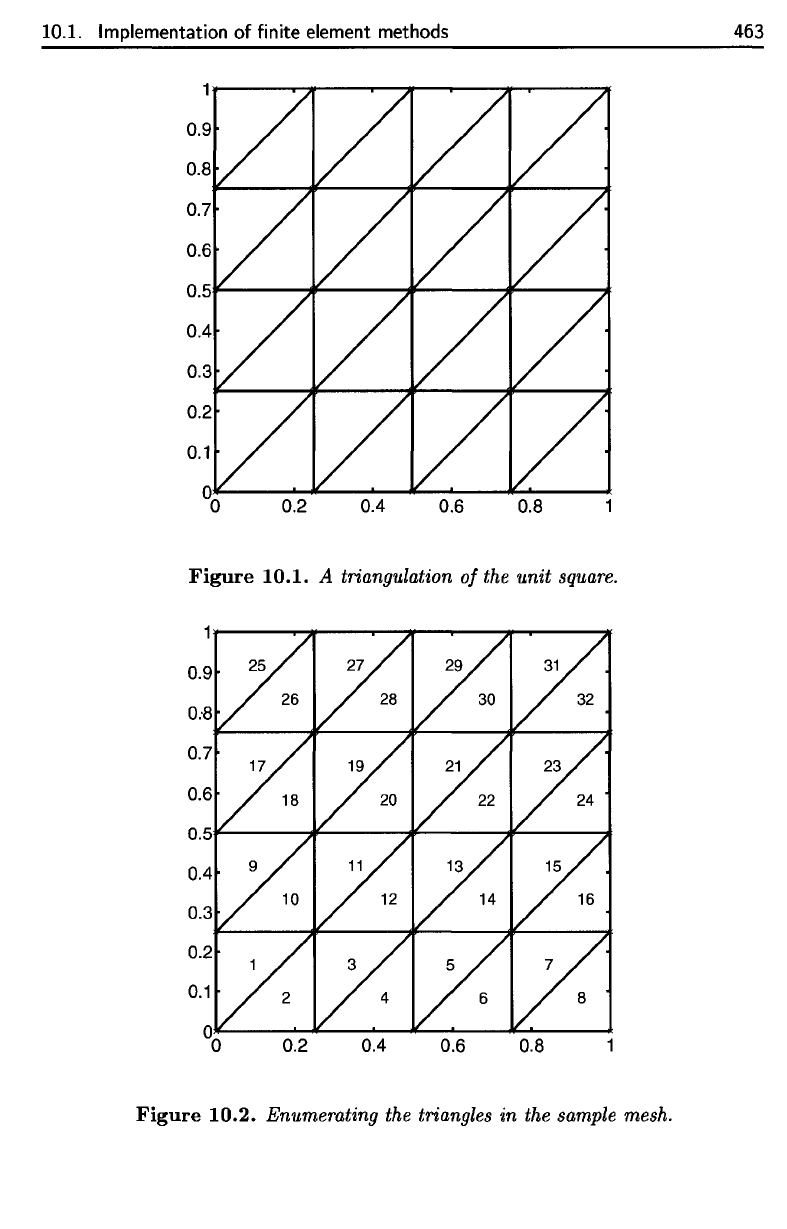
To
make this discussion as concrete as possible,
we
will use as an example a
regular triangular mesh, defined on
the
unit square, consisting of 32 triangles and
25
nodes. This mesh
is
shown in Figure IO.1.
In
order to perform
the
necessary calculations,
we
must know which nodes are
associated with which triangles. Of course, each triangle has three nodes;
we
need
to
know
the
indices of these three nodes in
the
list
lll,
ll2,
...
,
llM.
We
define
the
mapping e by the property
that
the
nodes of triangle
Ti
are
lle(i,1),lle(i,2),lle(i,3).
(So e is a function of two variables;
the
first must take an integral value from 1
to
L,
and the second one of the integers
1,2,3.)
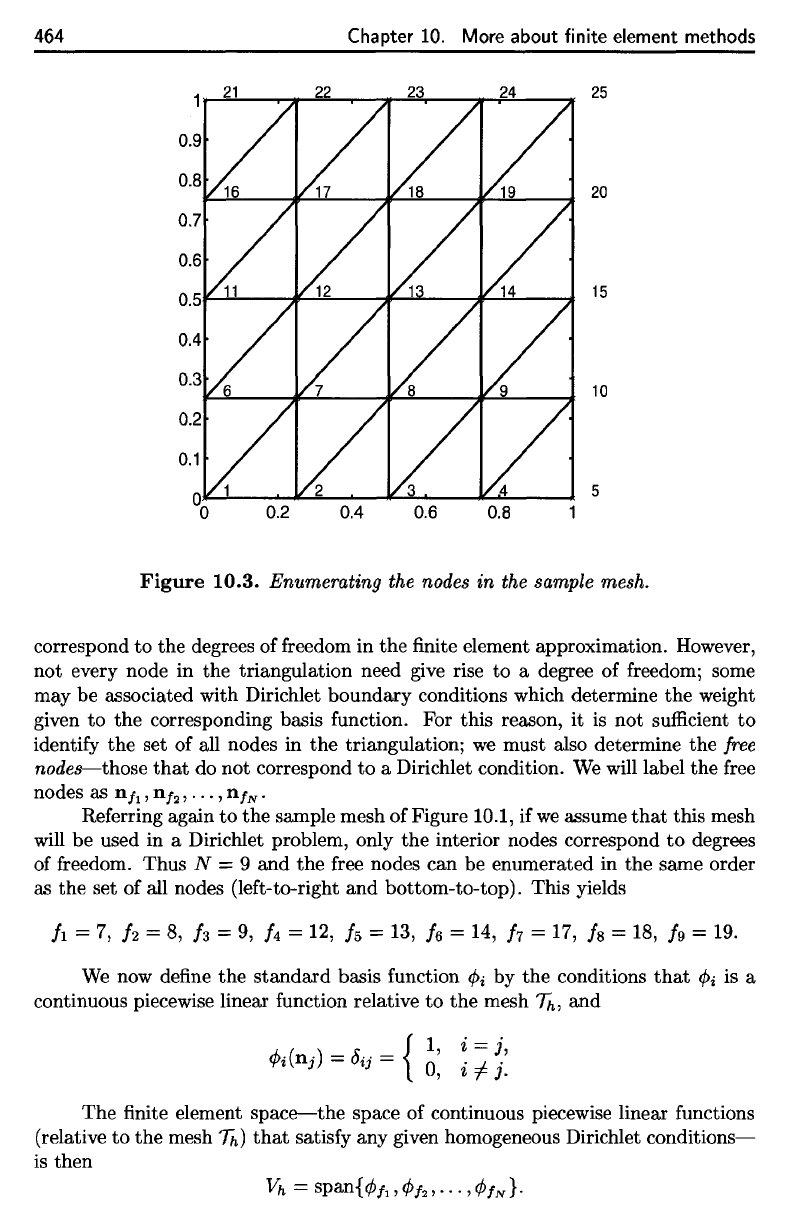
In
our sample mesh, there are 32 triangles (L = 32),
and
they are enumerated
as in Figure
10.2. The M =
25
nodes are enumerated as shown in Figure 10.3, which
explicitly shows
the
indices of
the
nodes belonging
to
each triangle. For example,
e(IO,
1)
==
6, e(IO,2)
==
7,
e(1O,3) = 12,
expressing the fact
that
the
vertices of triangle
10
are nodes
6,
7,
and
12.
Each of
the
standard basis functions for
the
space of continuous piecewise
linear functions corresponds to one node in the triangulation. The basis functions
751f
the
domain
n has curved boundaries,
then,
in
the
context
of
piecewise linear finite elements,
the
boundary
must
be
approximated
by a polygonal curve
made
up
of
edges
of
triangles.
This
introduces
an
additional
error
into
the
approximation.
When
using higher-order finite elements, for
example, piecewise
quadratic
or
piecewise cubic functions,
then
it
is straightforward
to
approximate
the
boundary
by
a piecewise polynomial curve
of
the
same
degree as is used for
the
finite element
functions.
This
technique is called
the
isopammetric
method,
and
it
leads
to
a significant reduction
in
the
error. We will ignore all such questions here
by
restricting ourselves
to
polygonal domains.
10.1.
Implementation
of
finite element methods
463
Figure
10.1.
A
triangulation
of
the
unit square.
Figure
10.2.
Enumerating
the
triangles
in the
sample
mesh.
10.1.
Implementation
of finite
element
methods
463
Figure
10.1.
A triangulation
of
the unit square.
Figure
10.2.
Enumerating the triangles in the sample mesh.
464
Chapter
10.
More about finite element methods
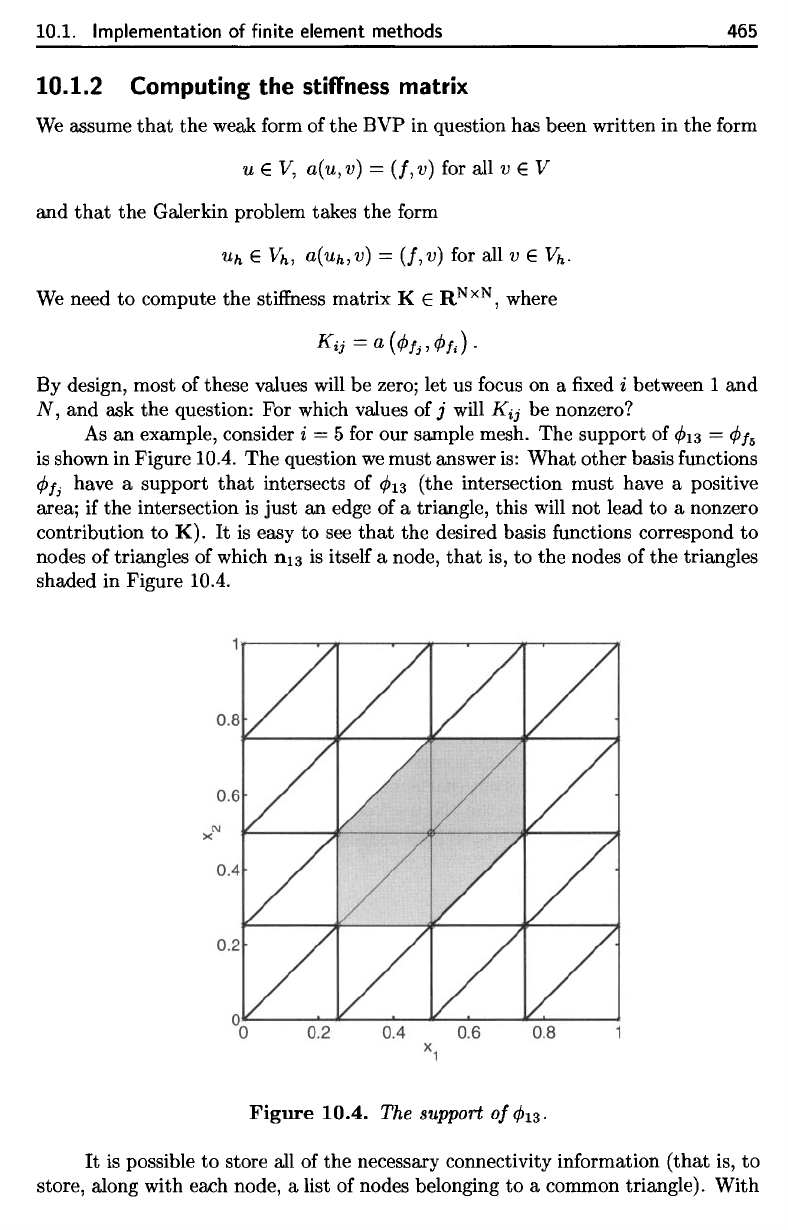
Figure
10.3. Enumerating
the
nodes
in the
sample mesh.
correspond
to the
degrees
of
freedom
in the finite
element approximation. However,
not
every node
in the
triangulation
need give rise
to a
degree
of
freedom; some
may
be
associated with Dirichlet boundary conditions which determine
the
weight
given
to the
corresponding
basis
function.
For
this reason,
it is not
sufficient
to
identify
the set of all
nodes
in the
triangulation;
we
must also determine
the
free
nodes—those
that
do not
correspond
to a
Dirichlet condition.
We
will
label
the
free
nodes
as
n^,
n/
2
,...,
n/^.
Referring
again
to the
sample mesh
of
Figure
10.1,
if we
assume
that
this mesh
will
be
used
in a
Dirichlet problem, only
the
interior nodes correspond
to
degrees
of
freedom.
Thus
N = 9 and the
free
nodes
can be
enumerated
in the
same order
as the set of all
nodes (left-to-right
and
bottom-to-top).
This yields
We
now
define
the
standard
basis
function
fa by the
conditions
that
fa is a
continuous piecewise linear
function
relative
to the
mesh
7ft,
and
The finite
element
space—the
space
of
continuous piecewise linear functions
(relative
to the
mesh
7ft)
that
satisfy
any
given homogeneous Dirichlet
conditions—
is
then
464
Chapter
10.
More about finite element methods
25
20
15
10
0.1
5
0.2 0.4
Figure
10.3.
Enumerating the nodes in the sample mesh.
correspond
to
the degrees of freedom in the finite element approximation. However,
not every node in the triangulation need give rise
to
a degree of freedom; some
may be associated with Dirichlet boundary conditions which determine the weight
given
to
the
corresponding basis function. For this reason, it
is
not sufficient
to
identify the set of all nodes in
the
triangulation;
we
must also determine the free
nodes-those
that
do not correspond
to
a Dirichlet condition.
We
will label
the
free
nodes as
ll/l,ll/2,
...
,llfN.
Referring again
to
the
sample mesh of Figure 10.1, if
we
assume
that
this mesh
will be used in a Dirichlet problem, only the interior nodes correspond
to
degrees
of freedom. Thus
N = 9 and
the
free nodes can be enumerated in the same order
as the set of all nodes (left-to-right and bottom-to-top). This yields
It
=
7,
h = 8, h =
9,
/4
= 12,
15
= 13,
16
= 14, h = 17,
Is
= 18, fg =
19.
We
now define
the
standard basis function
¢>i
by the conditions
that
¢>i
is a
continuous piecewise linear function relative
to
the mesh
1h,
and
A.
( )
J:
{I,
i =
j,
'l'i
lli
=
Vii
= 0 .
...J..
, Z r J.
The finite element
space-the
space of continuous piecewise linear functions
(relative
to
the
mesh
1h)
that
satisfy any given homogeneous Dirichlet
conditions-
is
then
10.1. Implementation
of
finite
element methods
465
By
design, most
of
these values
will
be
zero;
let us
focus
on a fixed i
between
1 and
AT,
and ask the
question:
For
which
values
of j
will
KIJ
be
nonzero?
As
an
example, consider
i — 5 for our
sample mesh.
The
support
of
^13
=
0/
5
is
shown
in
Figure 10.4.
The
question
we
must answer
is:
What
other basis
functions
(f>f
j
have
a
support
that
intersects
of
^13
(the intersection must have
a
positive
area;
if the
intersection
is
just
an
edge
of a
triangle, this
will
not
lead
to a
nonzero
contribution
to
K).
It is
easy
to see
that
the
desired basis
functions
correspond
to
nodes
of
triangles
of
which
1113
is
itself
a
node,
that
is, to the
nodes
of the
triangles
shaded
in
Figure 10.4.
Figure
10.4.
The
support
0/^13.
It is
possible
to
store
all of the
necessary connectivity information
(that
is, to
store, along with each node,
a
list
of
nodes belonging
to a
common triangle). With
10.1.2
Computing
the
stiffness
matrix
We
assume
that
the
weak
form
of the
B
VP in
question
has
been written
in the
form
and
that
the
Galerkin
problem takes
the
form
We
need
to
compute
the
stiffness
matrix
K €
R
NxN
,
where
10.1. Implementation
of
finite element methods 465
10.1.2 Computing the stiffness matrix
We
assume
that
the weak form of
the
BVP in question has been written in the form
u E
V,
a(u,v)
=
(f,v)
for all v E V
and
that
the
Galerkin problem takes the form
We
need
to
compute the stiffness matrix K E R
NXN
, where
By design, most of these values will be zero; let us focus on a fixed
i between 1
and
N,
and ask the question: For which values of j will
Kij
be nonzero?
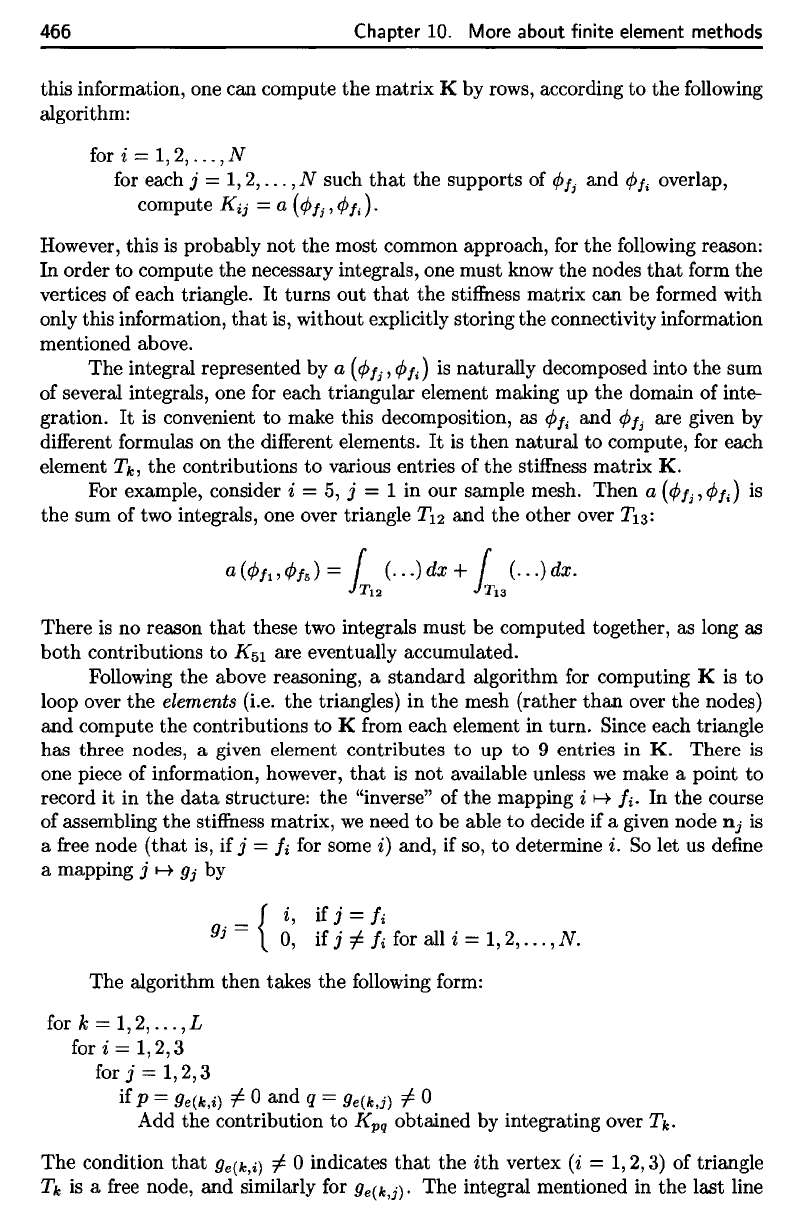
As
an example, consider i = 5 for our sample mesh. The support of
CP13
=
cP
16
is
shown in Figure lOA. The question
we
must answer
is:
What
other basis functions
CPt;
have a support
that
intersects of
CP13
(the intersection must have a positive
area; if the intersection
is
just an edge of a triangle, this will not lead
to
a nonzero
contribution to
K).
It
is
easy
to
see
that
the desired basis functions correspond
to
nodes of triangles of which
n13
is
itself a node,
that
is,
to
the nodes of
the
triangles
shaded in Figure
lOA.
Figure
10.4.
The support
of
CP13.
It
is
possible
to
store all of the necessary connectivity information
(that
is,
to
store, along with each node, a list of nodes belonging
to
a common triangle).
With
466
Chapter
10.
More about
finite
element methods
this information,
one can
compute
the
matrix
K by
rows, according
to the
following
algorithm:
for
i =
1,2,...,N
for
each
j =
l,2,...,N
such
that
the
supports
of
(f)f
j
and
(f>f
t
overlap,
compute
Kij = a
(<j>f.,
0^).
However,
this
is
probably
not the
most common approach,
for the
following
reason:
In
order
to
compute
the
necessary integrals,
one
must
know
the
nodes
that
form
the
vertices
of
each triangle.
It
turns
out
that
the
stiffness
matrix
can be
formed
with
only
this
information,
that
is,
without explicitly storing
the
connectivity information
mentioned above.
The
integral represented
by a
(0^.,
<}>f.)
is
naturally decomposed into
the sum
of
several integrals,
one for
each triangular element making
up the
domain
of
inte-
gration.
It is
convenient
to
make this decomposition,
as
<j>f
4
and
0^.
are
given
by
different
formulas
on the
different
elements.
It is
then natural
to
compute,
for
each
element
Tk, the
contributions
to
various entries
of the
stiffness
matrix
K.
For
example,
consider
%
= 5, j = 1 in our
sample mesh.
Then
a
((f>f^
0/J
is
the sum of two
integrals,
one
over triangle
T
i2
and the
other over
Ti
3
:
There
is no
reason
that
these
two
integrals must
be
computed together,
as
long
as
both contributions
to
K
5
i
are
eventually accumulated.
Following
the
above reasoning,
a
standard
algorithm
for
computing
K is to
loop
over
the
elements (i.e.
the
triangles)
in the
mesh (rather
than
over
the
nodes)
and
compute
the
contributions
to K
from
each element
in
turn. Since each triangle
has
three nodes,
a
given element contributes
to up to 9
entries
in K.
There
is
one
piece
of
information, however,
that
is not
available unless
we
make
a
point
to
record
it in the
data
structure:
the
"inverse"
of the
mapping
i
t-t
fa. In the
course
of
assembling
the
stiffness
matrix,
we
need
to be
able
to
decide
if a
given node
n^
is
a
free
node
(that
is, if j = fa for
some
i)
and,
if so, to
determine
i. So let us
define
a
mapping
j
•->•
gj by
The
algorithm then takes
the
following
form:
for
A?
=
1,2,...,L
for»
=
1,2,3
for
j
=
1,2,3
if
P =
9e(k,i)
^
0 and q =
g
e(kij)
±
0
Add
the
contribution
to
K
pq
obtained
by
integrating
over
Tk.
The
condition
that
g
e
(k,i)
/
0
indicates
that
the
ith
vertex
(i =
1,2,3)
of
triangle
Tk
is a
free
node,
and
similarly
for
<?
e
(fc,j)
• The
integral mentioned
in the
last
line
466
Chapter 10. More
about
finite element methods
this information, one can compute the matrix K by rows, according
to
the following
algorithm:
for
i = 1,2,
...
, N
for each j = 1,2,
...
, N such
that
the supports of
cPlj
and
cPl.
overlap,
compute
Kij
= a
(cPlj,
cPl.)·
However, this
is
probably not the most common approach,
for
the following reason:
In order
to
compute the necessary integrals, one must know the nodes
that
form the
vertices of each triangle.
It
turns out
that
the stiffness matrix can be formed with
only this information,
that
is, without explicitly storing the connectivity information
mentioned above.
The integral represented by
a
(cP/;,
cPf;)
is
naturally decomposed into the sum
of several integrals, one for each triangular element making up the domain of inte-
gration.
It
is
convenient
to
make this decomposition, as
cPf;
and
cPlj
are given by
different formulas on the different elements.
It
is
then natural to compute, for each
element
T
k
,
the contributions
to
various entries of the stiffness matrix K.
For example, consider i =
5,
j = 1 in our sample mesh. Then a
(cPlj
,
cPl;)
is
the sum of two integrals, one over triangle
T12
and the other over
T13:
There
is
no reason
that
these two integrals must be computed together, as long as
both contributions to
K51
are eventually accumulated.
Following the above reasoning, a standard algorithm for computing
K is
to
loop over the elements
(Le.
the triangles) in the mesh (rather
than
over the nodes)
and compute the contributions
to
K from each element in turn. Since each triangle
has three nodes,
a given element contributes
to
up
to
9 entries in
K.
There
is
one piece of information, however,
that
is
not available unless
we
make a point
to
record it in the
data
structure: the "inverse" of the mapping i f-+
Ii.
In the course
of assembling the stiffness matrix,
we
need
to
be able to decide if a given node
nj
is
a free node (that is, if j =
Ii
for some
i)
and, if so,
to
determine
i.
So
let us define
a mapping j
f-+
gj
by
i,
if j =
Ii
0,
if j
:#
Ii for all i = 1,2,
...
, N.
The algorithm then takes the following form:
for
k =
1,
2,
...
, L
for i =
1,2,3
forj=1,2,3
if p =
ge(k,i)
:#
0 and q =
ge(k,j)
:#
0
Add the contribution
to
Kpq
obtained by integrating over Tk.
The condition
that
ge(k,i)
:#
0 indicates
that
the
ith
vertex (i =
1,2,3)
of triangle
n
is
a free node, and similarly for
ge(k,j).
The integral mentioned in the last line
10.1.
Implementation
of
finite
element methods
467
of
this
algorithm
is the
contribution
to
K
pq
= a
(0
e
(fc,j)>0e(M))
fr°
m
the
element
TV
Also,
it
should
be
pointed
out
that,
in the
case
that
K is
symmetric
(as it is in
the
examples considered
in
this
book),
part
of the
work
can be
eliminated:
we
just
compute
the
entries
K
pq
with
q>p,
and
then assign
the
value
of
K
pq
to
K
qp
.
We
have described above
the
information needed
to
carry
out
this algorithm.
It is
easy
to
store this information
in
arrays
for use in a
computer program.
A
simple
data
structure would consist
of
four
arrays:
76
1.
NodeList:
An M x 2
array;
the iih row
consists
of the x and y
coordinates
of
node
n^.
2.
ElementList:
An L x 3
array;
the
kth
row
consists
of
e(fc,l),e(fc,2),e(fc,3).
3.
FreeNodePtrs:
An N x 1
array;
the iih
entry
is
/j.
4.
NodePtrs:
An M x 1
array;
the iih
entry
is
gi.
By
way of
example, Table 10.1 shows these arrays
for the
sample mesh
of
Figure
10.1.
The
information recorded
in
these arrays
will
suffice
for
straightforward
finite
element problems with homogeneous Dirichlet
or
Neumann boundary conditions
(or
even
for
inhomogeneous Dirichlet
problems—see
Exercise
5). For
problems with
inhomogeneous Neumann conditions,
it may
also
be
necessary
to
record whether
a
given
edge belongs
to the
boundary.
The
ElementList
array
can be
augmented
by
columns containing
flags
indicating whether
the
edges
lie on the
boundary. (Or,
of
course,
these
flags can be
stored
in
independent arrays,
if
desired.)
This
extension
is
left
to the
reader.
10.1.3
Computing
the
load
vector
Computing
the
load vector
f is
similar
to
computing
the
stiffness
matrix, only easier.
We
loop over
the
elements and,
for
each node
n/
{
of a
given triangle, compute
the
contribution
to
fi.
The
value
fi
will
be the sum of
integrals
over
one or
more
triangles,
and
this
sum is
accumulated
as we
loop over
the
triangular elements.
for
k =
1,2,...,L
for
i =
1,2,3
if
P
=
9e(k,i)
/
0
Add
the
contribution
to
f
p
obtained
by
integrating over
T^.
10.1.4
Quadrature
Up
to
this point,
we
have computed
all
integrals exactly, perhaps with
the
help
of a
computer package such
as
Mathematica
or
Maple.
However, this would
be
difficult
to
incorporate into
a
general-purpose computer program
for finite
elements. Moreover,
it is not
necessary
to
compute
the
various integrals exactly,
and it may be
more
76
Using
modern techniques, such
as
modular programming
or
object-oriented programming,
one
might
define
a
structure
or a
class
to
represent
a
mesh.
10.1. Implementation
of
finite element methods
467
of this algorithm is
the
contribution
to
Kpq
= a
(tPe(k,j)
,
tPe(k,i))
from
the
element
T
k
.
Also, it should be pointed out
that,
in the case
that
K
is
symmetric (as it
is
in
the examples considered in this book),
part
of the work can be eliminated:
we
just
compute
the
entries
Kpq
with q 2 p, and then assign the value of
Kpq
to
Kqp.
We
have described above the information needed
to
carry out this algorithm.
It
is
easy
to
store this information in arrays for use in a computer program. A
simple
data
structure would consist of four arrays: 76
1.
NodeList:
An M x 2 array; the
ith
row consists of
the
x
and
y coordinates
of node
ni.
2.
ElementList:
An L x 3 array; the
kth
row consists of
e(k,1),e(k,2),e(k,3).
3.
FreeNodePtrs:
An N x 1 array;
the
ith
entry
is
k
4.
NodePtrs:
An M x 1 array; the
ith
entry is
gi.
By way of example, Table 10.1 shows these arrays for the sample mesh of Figure
10.1. The information recorded in these arrays will suffice for straightforward finite
element problems with homogeneous Dirichlet or Neumann boundary conditions
(or even for inhomogeneous Dirichlet
problems-see
Exercise 5). For problems with
inhomogeneous Neumann conditions, it may also be necessary
to
record whether a
given edge belongs to the boundary. The
ElementList
array can be augmented by
columns containing flags indicating whether
the
edges
lie
on
the
boundary. (Or, of
course, these flags can be stored in independent arrays, if desired.) This extension
is
left to the reader.
10.1.3 Computing the
load
vector
Computing
the
load vector f
is
similar to computing
the
stiffness matrix, only easier.
We
loop over
the
elements and, for each node
nt.
of a given triangle, compute
the
contribution to
Ii.
The value
Ii
will
be the sum of integrals over one or more
triangles,
and
this sum
is
accumulated as
we
loop over the triangular elements.
for
k = 1,2,
...
, L
for i =
1,2,3
if
p =
ge(k,i)
f:-
0
Add the contribution
to
Ip
obtained by integrating over T
k
·
10.1.4 Quadrature
Up
to
this point,
we
have computed all integrals exactly, perhaps with
the
help of a
computer package such as
Mathematica or
Maple.
However, this would be difficult
to
incorporate into a general-purpose computer program for finite elements. Moreover,
it
is not necessary
to
compute
the
various integrals exactly,
and
it may be more
76Using
modern
techniques, such as
modular
programming
or
object-oriented
programming,
one
might
define a
structure
or
a class
to
represent a mesh.