Masujima M. Applied Mathematical Methods in Theoretical Physics
Подождите немного. Документ загружается.

378 10 Calculus of Variations: Applications
These equations are a part of the infinite system of coupled equations. We observe
the following identities:
&
ψ
ε
(y)
ˆ
ψ
β
(x)
J
=−iS
J
F,βε
(x, y),
ˆ
ψ
ε
(y)
&
ψ
α
(x)
J
= iS
J
F,εα
(y, x),
&
ψ
ε
(y)
ˆ
ψ
β
(x)
ˆ
φ(x)
J
=−i
ˆ
φ(x)
J
+
1
i
δ
δJ(x )
S
J
F,βε
(x, y),
ˆ
ψ
ε
(y)
&
ψ
α
(x)
ˆ
φ(x)
J
= i
ˆ
φ(x)
J
+
1
i
δ
δJ(x )
S
J
F,εα
(y, x).
With these identities, we obtain the equations of motion of the connected parts of
the two-point ‘‘full’’ Green’s functions in the presence of the external hook J(x),
D
αβ
(x) − G
0
γ
αβ
(x)
ˆ
φ(x)
J
+
1
i
δ
δJ(x )
S
J
F,βε
(x, y) = δ
αε
δ
4
(x − y),
(10.4.31a)
D
T
βα
(−x) − G
0
γ
αβ
(x)
ˆ
φ(x)
J
+
1
i
δ
δJ(x )
S
J
F,εα
(y, x) = δ
βε
δ
4
(x − y),
(10.4.32a)
K(x)D
J
F
(x, y) +G
0
γ
αβ
(x)
1
i
δ
δJ(y)
S
J
F,βα
(x, x
±
) = δ
4
(x − y). (10.4.33a)
Since the transpose of Eq. (10.4.32a) is Eq. (10.4.31a), we have to consider only
Eqs. (10.4.31a) and (10.4.33a). We may get the impression that we have the
equations of motion of the two-point ‘‘full’’ Green’s functions, S
J
F,αβ
(x, y)and
D
J
F
(x, y), in closed form at first sight. Because of the presence of the func-
tional derivatives δiδJ(x), and δiδJ(y), however, Eqs. (10.4.31a), (10.4.32a) and
(10.4.33a) involve the three-point ‘‘full’’ Green’s functions and are merely a part
of the infinite system of the coupled nonlinear equations of motion of the ‘‘full’’
Green’s functions.
From this point onward, we use the variables, ‘‘1’’, ‘‘2’’, ‘‘3’’, ...,torepresentthe
continuous space–time indices, x, y, z, ..., the spinor indices, α, β, γ , ...,aswell
as other internal indices, i, j, k, ...,.
With the use of the ‘‘free’’ Green’s functions, S
F
0
(1 −2) and D
F
0
(1 −2), defined by
D(1)S
F
0
(1 −2) = 1, (10.4.34a)
K(1)D
F
0
(1 −2) = 1, (10.4.34b)
we rewrite the functional differential equations satisfied by the ‘‘full’’ Green’s
functions, S
J
F
(1, 2) and D
J
F
(1, 2), Eqs. (10.4.31a) and (10.4.33a), into the integral
equations,
S
J
F
(1, 2) = S
F
0
(1 −2) +S
F
0
(1 −3)(G
0
γ (3))
ˆ
φ(3)
J
+
1
i
δ
δJ(3)
S
J
F
(3, 2),
(10.4.31b)

10.4 Schwinger–Dyson Equation in Quantum Field Theory 379
D
J
F
(1, 2) = D
F
0
(1 −2) +D
F
0
(1 −3)
−G
0
trγ (3)
1
i
δ
δJ(2)
S
J
F
(3, 3
±
)
. (10.4.33b)
We compare Eqs. (10.4.31b) and (10.4.33b) with the defining integral equations of
the proper self-energy parts ,
∗
and
∗
, due to Dyson, in the presence of the external
hook J(x),
S
J
F
(1, 2) = S
F
0
(1 −2) +S
F
0
(1 −3)(G
0
γ (3)φ(3)
J
)S
J
F
(3, 2)
+ S
F
0
(1 −3)
∗
(3, 4)S
J
F
(4, 2), (10.4.35)
D
J
F
(1, 2) = D
F
0
(1 −2) +D
F
0
(1 −3)
∗
(3, 4)D
J
F
(4, 2), (10.4.36)
obtaining
G
0
γ (1)
1
i
δ
δJ(1)
S
J
F
(1, 2) =
∗
(1, 3)S
J
F
(3, 2) ≡
∗
(1)S
J
F
(1, 2), (10.4.37)
−G
0
trγ (1)
1
i
δ
δJ(2)
S
J
F
(1, 1
±
) =
∗
(1, 3)D
J
F
(3, 2) ≡
∗
(1)D
J
F
(1, 2). (10.4.38)
Thus we can write the functional differential equations, Eqs. (10.4.31a) and
(10.4.33a), compactly as
{D(1) −G
0
γ (1)
ˆ
φ(1)
J
−
∗
(1)}S
J
F
(1, 2) = δ(1 −2), (10.4.39)
{K(1) −
∗
(1)}D
J
F
(1, 2) = δ(1 −2). (10.4.40)
Defining the nucleon differential operator and the meson differential operator by
D
N
(1, 2) ≡{D(1) − G
0
γ (1)
ˆ
φ(1)
J
}δ(1 −2) −
∗
(1, 2), (10.4.41)
and
D
M
(1, 2) ≡ K(1)δ(1 −2) −
∗
(1, 2), (10.4.42)
we can write the differential equations, Eqs. (10.4.39) and (10.4.40), as
D
N
(1, 3)S
J
F
(3, 2) = δ(1 − 2), or D
N
(1, 2) = (S
J
F
(1, 2))
−1
, (10.4.43)
and
D
M
(1, 3)D
J
F
(3, 2) = δ(1 −2), or D
M
(1, 2) = (D
J
F
(1, 2))
−1
. (10.4.44)
Next, we take the functional derivative of Eq. (10.4.39),
1
i
δ
δJ(3)
Eq. (10.4.39):
{D(1) −G
0
γ (1)
ˆ
φ(1)
J
−
∗
(1)}
1
i
δ
δJ(3)
S
J
F
(1, 2)
=
iG
0
γ (1)D
J
F
(1, 3) +
1
i
δ
δJ(3)
∗
(1)
S
J
F
(1, 2). (10.4.45)
380 10 Calculus of Variations: Applications
Solving Eq. (10.4.45) for δS
J
F
(1, 2)iδJ(3) and with the use of Eqs. (10.4.39),
(10.4.41), and (10.4.43), we obtain
1
i
δ
δJ(3)
S
J
F
(1, 2) = S
J
F
(1, 4)
iG
0
γ (4)D
J
F
(4, 3) +
1
i
δ
δJ(3)
∗
(4)
S
J
F
(4, 2)
= iG
0
S
J
F
(1, 4)
γ (4)δ(4 −5)δ(4 −6)
+
1
G
0
δ
δ
ˆ
φ(6)
J
∗
(4, 5)
S
J
F
(5, 2)D
J
F
(6, 3). (10.4.46)
Comparing Eq. (10.4.46) with the definition of the vertex operator (4, 5;6) of
Dyson,
1
i
δ
δJ(3)
S
J
F
(1, 2) ≡ iG
0
S
J
F
(1, 4)(4, 5;6)S
J
F
(5, 2)D
J
F
(6, 3), (10.4.47)
we obtain
(1, 2;3) = γ (1)δ(1 − 2)δ(1 −3) +
1
G
0
δ
δ
ˆ
φ(3)
J
∗
(1, 2), (10.4.48)
while we can write the left-hand side of Eq. (10.4.47) as
1
i
δ
δJ(3)
S
J
F
(1, 2) = iD
J
F
(6, 3)
δ
δ
ˆ
φ(6)
J
S
J
F
(1, 2). (10.4.49)
From this, we have
−
1
G
0
δ
δ
ˆ
φ(6)
J
S
J
F
(1, 2) =−S
J
F
(1, 4)(4, 5;6)S
J
F
(5, 2),
and we obtain the compact representation of (1, 2;3),
(1, 2;3) =−
1
G
0
δ
δ
ˆ
φ(3)
J
(S
J
F
(1, 2))
−1
=−
1
G
0
δ
δ
ˆ
φ(3)
J
D
N
(1, 2)
= (10.4.48). (10.4.50)
Lastly, from Eqs. (10.4.38) and (10.4.39), which define
∗
(1, 2) and
∗
(1, 2)
indirectly and the defining equation of (1, 2;3), Eq. (10.4.47), we have
∗
(1, 3)S
J
F
(3, 2) =−iG
2
0
γ (1)S
J
F
(1, 4)(4, 5;6)S
J
F
(5, 2)D
J
F
(6, 1), (10.4.51)
∗
(1, 3)D
J
F
(3, 2) = iG
2
0
trγ (1)S
J
F
(1, 4)(4, 5;6)S
J
F
(5, 1)D
J
F
(6, 2). (10.4.52)
Namely, we obtain
∗
(1, 2) =−iG
2
0
γ (1)S
J
F
(1, 3)(3, 2;4)D
J
F
(4, 1), (10.4.53)
∗
(1, 2) = iG
2
0
trγ (1)S
J
F
(1, 3)(3, 4;2)S
J
F
(4, 1). (10.4.54)

10.4 Schwinger–Dyson Equation in Quantum Field Theory 381
Equation (10.4.30) can be expressed after setting η = η = 0as
K(1)
ˆ
φ(1)
J
+ iG
0
tr(γ (1)S
J
F
(1, 1)) =−J(1). (10.4.55)
System of equations, (10.4.41), (10.4.42), (10.4.43), (10.4.44), (10.4.48), (10.4.53),
(10.4.54), and (10.4.55), is called the Schwinger–Dyson equation. This system of
the nonlinear coupled integro-differential equations is exact and closed. Starting
from the 0th-order term of (1, 2;3), we can develop the covariant perturbation
theory by iteration. In the first-order approximation, after setting J = 0, we have
the following expressions:
∗
(1 −2)
∼
=
−iG
2
0
γ (1)S
F
0
(1 −2)γ (2)D
F
0
(2 −1), (10.4.56)
∗
(1 −2)
∼
=
iG
2
0
tr{γ (1)S
F
0
(1 −2)γ (2)S
F
0
(2 −1)}, (10.4.57)
and
(1, 2;3)
∼
=
γ (1)δ(1 −2)δ(1 −3) −iG
2
0
γ (1)S
F
0
(1 −3)γ (3)
× S
F
0
(3 −2)γ (2)D
F
0
(2 −1). (10.4.58)
We point out that the covariant perturbation theory based on the Schwinger–Dyson
equation is somewhat different in spirit from the standard covariant perturbation
theory due to Feynman and Dyson. The former is capable of dealing with the
bound-state problem in general as will be shown shortly. Its power is demonstrated
in the positronium problem.
Summary of Schwinger–Dyson Equation
D
N
(1, 3)S
J
F
(3, 2) = δ(1 − 2), D
M
(1, 3)D
J
F
(3, 2) = δ(1 −2),
D
N
(1, 2) ≡{D(1) − G
0
γ (1)
ˆ
φ(1)
J
}δ(1 −2) −
∗
(1, 2),
D
M
(1, 2) ≡ K(1)δ(1 −2) −
∗
(1, 2),
K(1)
ˆ
φ(1)
J
+ iG
0
tr(γ (1)S
J
F
(1, 1)) =−J(1),
∗
(1, 2) ≡−iG
2
0
γ (1)S
J
F
(1, 3)(3, 2;4)D
J
F
(4, 1),
∗
(1, 2) ≡ iG
2
0
tr{γ (1)S
J
F
(1, 3)(3, 4;2)S
J
F
(4, 1)},
(1, 2;3) ≡−
1
G
0
δ
δ
ˆ
φ(3)
J
(S
J
F
(1, 2))
−1
= γ (1)δ(1 − 2)δ(1 −3) +
1
G
0
δ
δ
ˆ
φ(3)
J
∗
(1, 2).
382 10 Calculus of Variations: Applications
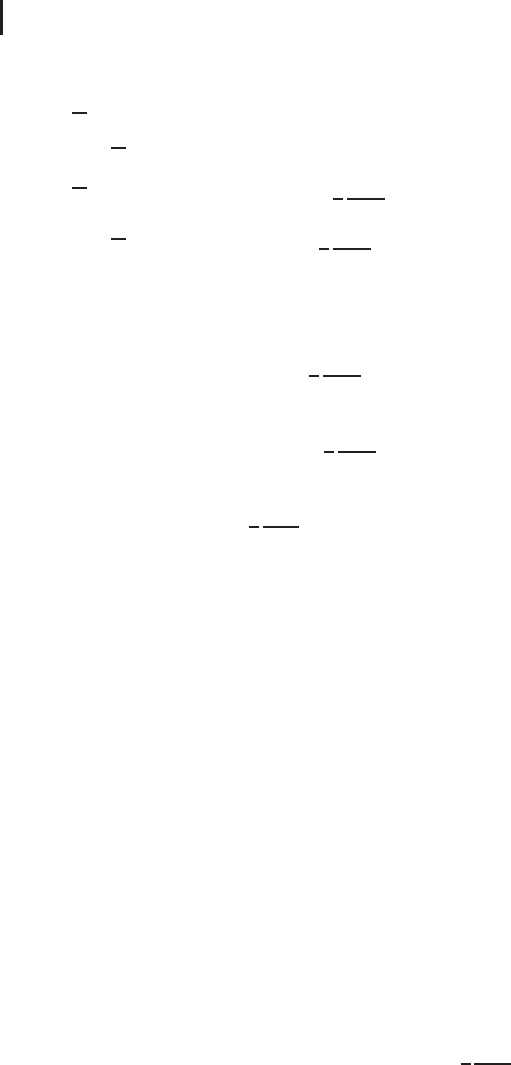
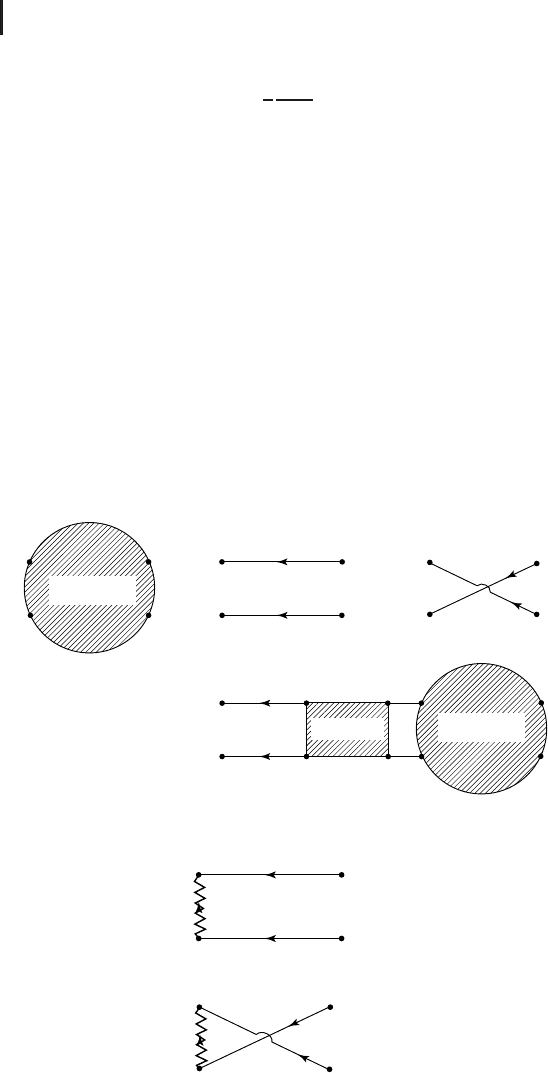
∑
∗
(1,2) =
g(1)
123
4
S
F
′J
(1,3)
D
F
′J
(4,1)
Γ (3,2;4)
Fig. 10.1 Graphical representation of the proper self-energy part,
∗
(1, 2).
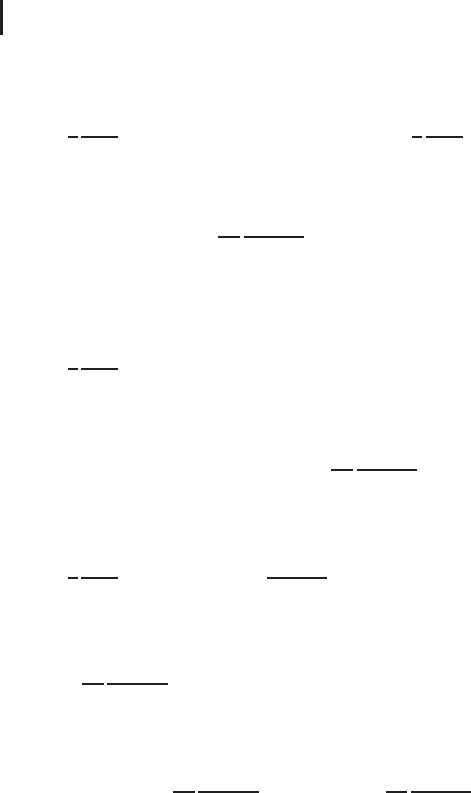
Π
∗
(1,2) = g (1)
1
2
3
4
S
F
′J
(1,3)
S
F
′J
(4,1)
Γ (3,4;2)
Fig. 10.2 Graphical representation of the proper self-energy part,
∗
(1, 2).
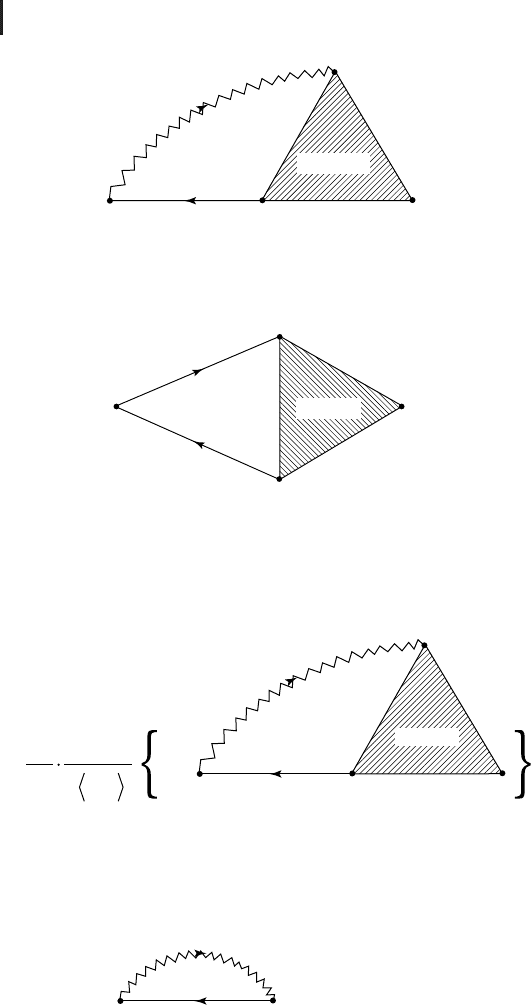
Γ(1,2;3) = g (1)d (1− 2)d (1 − 3)
1
2
• 3
G
0
1
d
+
1
2
4
5
J
f (3)
d
^
g(1)
S
F
′J
(1,4)
D
F
′J
(5,1)
Γ (4,2;5)
Fig. 10.3 Graphical representation of the vertex operator, (1, 2; 3).
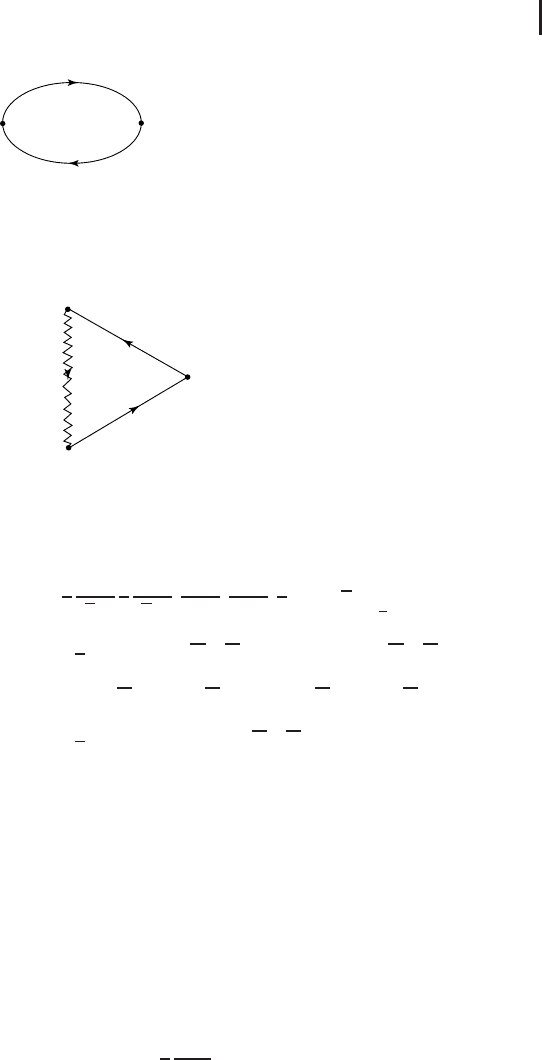
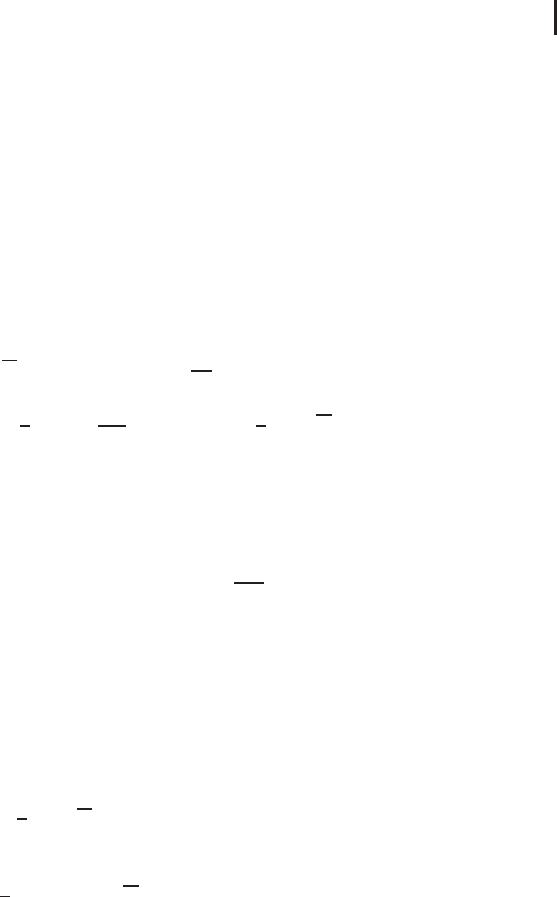
∑(1– 2) ≅
g(1)
g(2)
12
∗
S
o
F
(1–2)
D
o
F
(2–1)
Fig. 10.4 The first-order approximation to the proper self-energy part,
∗
(1, 2).
10.4 Schwinger–Dyson Equation in Quantum Field Theory 383
Π
∗
(1– 2) ≅
g(1) g(2)
12
S
o
F
(1– 2)
S
o
F
(2–1)
Fig. 10.5 The first-order approximation to the proper self-energy part,
∗
(1, 2).
−
iG
o
2
·
D
F
o
(2–1)
1
2
3
g(2)
g(1)
g(3)
S
o
F
(1– 3)
S
o
F
(3– 2)
Γ(1,2;3) ≅ g (1)d (1 − 2)d (1− 3)
1
2
• 3
Fig. 10.6 The first-order approximation to the vertex operator, (1, 2; 3).
We consider the two-body (four-point) nucleon ‘‘full’’ Green’s function S
J
F
(1, 2;3, 4)
with the Yukawa coupling, Eqs. (10.4.20) and (10.4.21), in mind, defined by
S
J
F
(1, 2;3, 4) ≡
1
i
δ
δη(1)
1
i
δ
δη(2)
i
δ
δη(4)
i
δ
δη(3)
1
i
ln Z[J,
η, η]
η=η=0
=
1
i
2
{
ˆ
ψ(1)
ˆ
ψ(2)
&
ψ(3)
&
ψ(4)
J
−
ˆ
ψ(1)
ˆ
ψ(2)
J
&
ψ(3)
&
ψ(4)
J
+
ˆ
ψ(1)
&
ψ(3)
J
ˆ
ψ(2)
&
ψ(4)
J
−
ˆ
ψ(1)
&
ψ(4)
J
ˆ
ψ(2)
&
ψ(3)
J
}
≡
1
i
2
0, out
T(
ˆ
ψ(1)
ˆ
ψ(2)
&
ψ(3)
&
ψ(4))
0, in
J
C
. (10.4.59)
Operating the differential operators, D
N
(1, 5) and D
N
(2, 6), on S
J
F
(5, 6;3, 4) and
using the Schwinger–Dyson equation derived above, we obtain
{D
N
(1, 5)D
N
(2, 6) −I(1, 2;5, 6)}S
J
F
(5, 6;3, 4)
= δ(1 −3)δ(2 −4) −δ(1 − 4)δ(2 −3), (10.4.60)
where the operator I(1, 2;3, 4) is called the proper interaction kernel and satisfies
the following integral equations:
I(1, 2;5, 6)S
J
F
(5, 6;3, 4)
= ig
2
0
tr
(M)
[γ (1)(2)D
J
F
(5, 6)]S
J
F
(5, 6;3, 4)
+ ig
2
0
tr
(M)
γ (1)S
J
F
(1, 5)
1
i
δ
δJ(5)
I(5, 2;6, 7)S
J
F
(6, 7;3, 4) (10.4.61)
384 10 Calculus of Variations: Applications
= ig
2
0
tr
(M)
[γ (2)(1)D
J
F
(5, 6)]S
J
F
(5, 6;3, 4)
+ ig
2
0
tr
(M)
γ (2)S
J
F
(2, 5)
1
i
δ
δJ(5)
I(1, 5;6, 7)S
J
F
(6, 7;3, 4). (10.4.62)
Here tr
(M)
indicates that the trace should be taken only over the meson coordinate.
Equation (10.4.60) can be cast into the integral equation after a little algebra as
S
J
F
(1, 2;3, 4) = S
J
F
(1, 3)S
J
F
(2, 4) −S
J
F
(1, 4)S
J
F
(2, 3)
+ S
J
F
(1, 5)S
J
F
(2, 6)I(5, 6;7, 8)S
J
F
(7, 8;3, 4). (10.4.63)
System of equations, (10.4.60) (or (10.4.63)) and (10.4.61) (or (10.4.62)), is called
the Bethe–Salpeter equation . If we set t
1
= t
2
= t > t
3
= t
4
= t
in Eq. (10.4.59),
S
J
F
(1, 2;3, 4) represents the transition probability amplitude whereby the nucleons
originally located at
x
3
and
x
4
at time t
are to be found at
x
1
and
x
2
at the later time t.
In the integral equations for I(1, 2;3, 4), Eqs. (10.4.61) and (10.4.62), the first terms
of the right-hand sides represent the scattering state and the second terms represent
the bound state. The bound state problem is formulated by dropping the first terms
of the right-hand sides of Eqs. (10.4.61) and (10.4.62). The proper interaction kernel
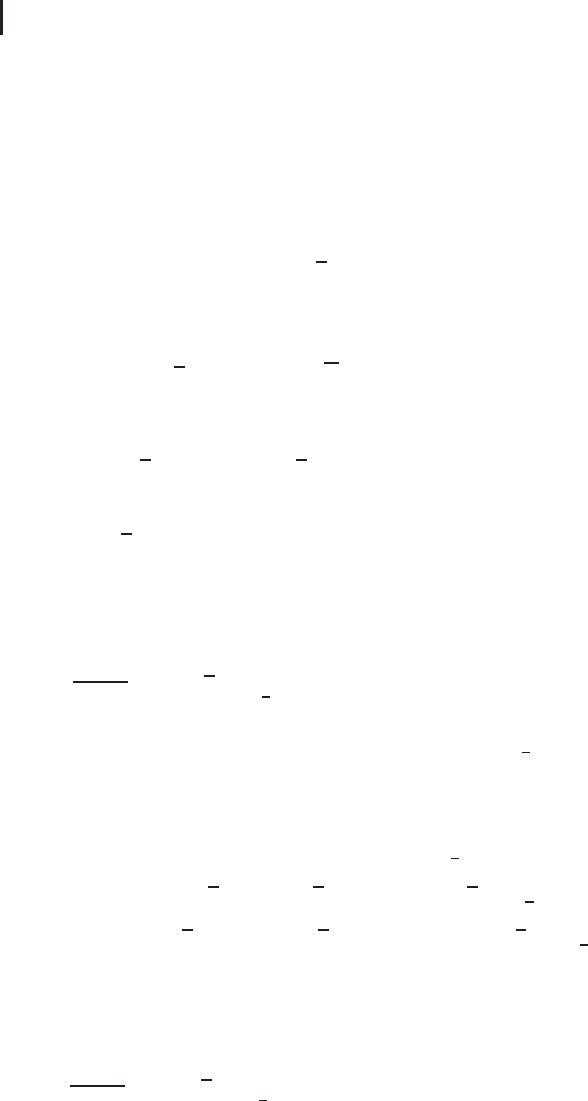
1
2
3
4
=
1
2
3
4
+
−
1
2
3
4
+
1
2
3
4
5
6
7
8
I (5,6;7,8)
S
F
′J
(2,4)
S
F
′J
(1,5)
S
F
′J
(2,6)
S
F
′J
(1,3)
S
F
′J
(1,2;3,4)
S
F
′J
(7,8;3,4)
S
F
′J
(1,4)
S
F
′J
(2,3)
Fig. 10.7 Graphical representation of the Bethe–Salpeter equation.
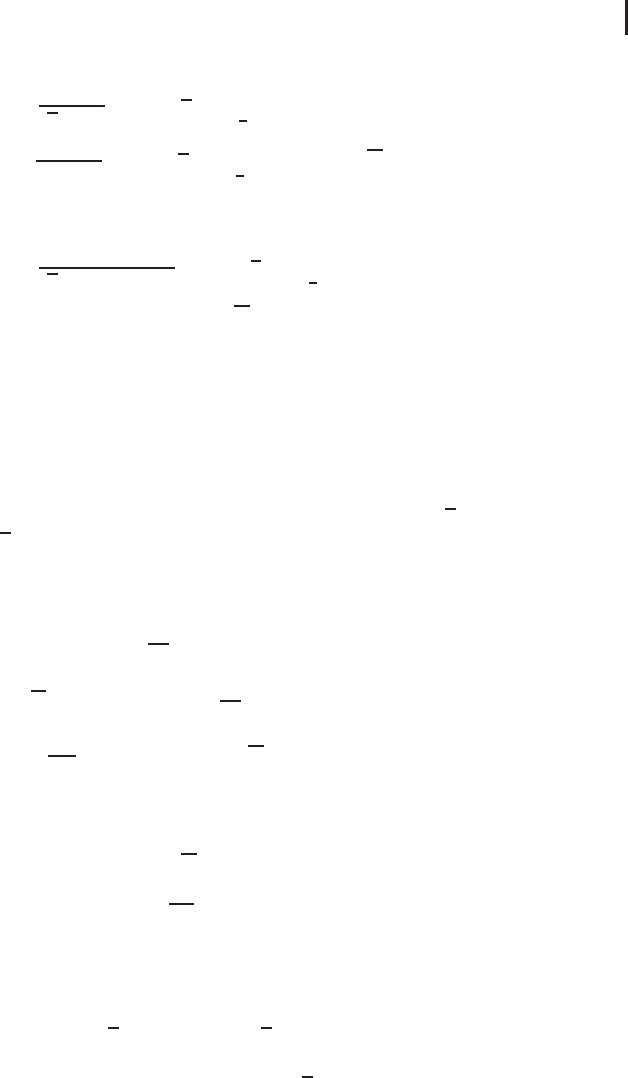
I (1,2;3,4) ≅
1
1
2
2
3
3
4
4
d (1–3)
d (2–4)
d (2–3)
d (1–4)
+
−
D
o
F
(1–2)
D
o
F
(1–2)
g(1)
g(1)
g(2)
g(2)
Fig. 10.8 The first-order approximation of the proper interaction kernel, I(1,2;3,4).
10.5 Schwinger–Dyson Equation in Quantum Statistical Mechanics 385
I(1, 2;3, 4) assumes the following form in the first-order approximation:
I(1, 2;3, 4)
∼
=
ig
2
0
γ (1)γ (2)D
F
0
(1 −2)(δ(1 − 3)δ(2 −4) −δ(1 −4)δ(2 − 3)).
(10.4.64)
10.5
Schwinger–Dyson Equation in Quantum Statistical Mechanics
We consider the grand canonical ensemble of the Fermion (mass m) and the Boson
(mass κ) with Euclidean Lagrangian density in contact with the particle source µ,
L
E
(ψ
Eα
(τ ,
x), ∂
µ
ψ
Eα
(τ ,
x ), φ(τ ,
x ), ∂
µ
φ(τ ,
x))
=
ψ
E α
(τ ,
x)
iγ
k
∂
k
+iγ
4
∂
∂τ
− µ
− m
α,β
ψ
E β
(τ ,
x)
+
1
2
φ(τ ,
x)
∂
2
∂x
2
ν
−κ
2
φ(τ ,
x) +
1
2
gTr{γ [
ψ
E
(τ ,
x ), ψ
E
(τ ,
x)]}φ(τ,
x ).
(10.5.1)
The density matrix ˆρ
GC
(β) of the grand canonical ensemble in the Schr
¨
odinger
Picture is given by
ˆρ
GC
(β) = exp[−β(
ˆ
H − µ
ˆ
N)], β =
1
k
B
T
, (10.5.2)
where the total Hamiltonian
ˆ
H is split into two parts,
ˆ
H
0
= free Hamiltonian for Fermion (mass m) and Boson (mass κ).
ˆ
H
1
=−
d
3
x ˆ (
x )
ˆ
φ(
x), (10.5.3)
with the ‘‘current’’ given by
ˆ(
x ) =
1
2
gTr{γ [
&
ψ
E
(
x ),
ˆ
ψ
E
(
x )]}, (10.5.4)
and
ˆ
N =
1
2
d
3
x Tr{−γ
4
[
&
ψ
E
(
x),
ˆ
ψ
E
(
x )]}. (10.5.5)
By the standard method of quantum field theory, we use the Interaction Picture
with
ˆ
N included in the free part, and obtain
ˆρ
GC
(β) = ˆρ
0
(β)
ˆ
S(β), (10.5.6a)
ˆρ
0
(β) = exp[−β(
ˆ
H
0
−µ
ˆ
N)], (10.5.7)
ˆ
S(β) = T
τ
exp
−
β
0
dτ
d
3
x
ˆ
H
1
(τ ,
x)
(10.5.8a)
386 10 Calculus of Variations: Applications
and
ˆ
H
1
(τ ,
x ) =−ˆ
(I)
(τ ,
x)
ˆ
φ
(I)
(τ ,
x). (10.5.9)
We know that the Interaction Picture operator
ˆ
f
(I)
(τ ,
x) is related to the Schr
¨
odinger
Picture operator
ˆ
f (
x)through
ˆ
f
(I)
(τ ,
x) = ˆρ
−1
0
(τ ) ·
ˆ
f (
x ) · ˆρ
0
(τ ). (10.5.10)
We introduce the external hook {J(τ ,
x), η
α
(τ ,
x), η
β
(τ ,
x)}in the Interaction Picture,
and obtain
ˆ
H
int
1
(τ ,
x ) =−{[ˆ
(I)
(τ ,
x ) + J(τ ,
x )]
ˆ
φ
(I)
(τ ,
x)
+
η
α
(τ ,
x)
ˆ
ψ
(I)
E α
(τ ,
x ) +
&
ψ
E β
(τ ,
x)η
β
(τ ,
x ))}. (10.5.11)
We replace Eqs. (10.5.6a), (10.5.7), and (10.5.8a) with
ˆρ
GC
(β;[J, η, η]) = ˆρ
0
(β)
ˆ
S(β;[J, η, η]), (10.5.6b)
ˆρ
0
(β) = exp[−β(
ˆ
H
0
− µ
ˆ
N)], (10.5.7)
ˆ
S(β;[J,
η, η]) = T
τ
exp
−
β
0
dτ
d
3
x
ˆ
H
int
1
(τ ,
x )
. (10.5.8b)
Here we have
(a) 0 ≤ τ ≤ β.
δ
δJ(τ ,
x )
ˆρ
GC
(β;[J, η, η])
J=η=η=0
= ˆρ
0
(β)T
τ
ˆ
φ
(I)
(τ ,
x )exp
−
β
0
dτ
d
3
x ]
ˆ
H
int
1
(τ ,
x)
J=η=η=0
= ˆρ
0
(β)T
τ
exp
−
β
τ
dτ
d
3
x
ˆ
H
int
1
×
ˆ
φ
(I)
(τ ,
x)T
τ
exp
−
τ
0
dτ
d
3
x
ˆ
H
int
1
J=η=η=0
= ˆρ
0
(β)
ˆ
S(β;[J, η, η])
ˆ
S(−τ ;[J, η, η])
ˆ
φ
(I)
(τ ,
x )
ˆ
S(τ ;[J, η, η])
J=η=η=0
= ˆρ
GC
(β;[J, η, η]){ ˆρ
0
(τ )
ˆ
S(τ ;[J, η, η])}
−1
ˆ
φ(
x ) { ˆρ
0
(τ )
ˆ
S(τ ;[J, η, η])}
J=η=η=0
= ˆρ
GC
(β)
ˆ
φ(τ ,
x ).
Thus we obtain
δ
δJ(τ ,
x )
ˆρ
GC
(β;[J, η, η])
J=η=η=0
= ˆρ
GC
(β)
ˆ
φ(τ ,
x ). (10.5.12)
10.5 Schwinger–Dyson Equation in Quantum Statistical Mechanics 387
Likewise we obtain
δ
δη
α
(τ ,
x)
ˆρ
GC
(β;[J, η, η])
J=η=η=0
= ˆρ
GC
(β)
ˆ
ψ
E α
(τ ,
x), (10.5.13)
δ
δη
β
(τ ,
x )
ˆρ
GC
(β;[J, η, η])
J=η=η=0
=−ˆρ
GC
(β)
&
ψ
E β
(τ ,
x), (10.5.14)
and
δ
2
δη
α
(τ ,
x)δη
β
(τ
,
x)
ˆρ
GC
(β;[J, η, η])
J=η=η=0
=−ˆρ
GC
(β)T
τ
{
ˆ
ψ
E α
(τ ,
x)
&
ψ
E β
(τ ,
x )}. (10.5.15)
The Heisenberg Picture operator
ˆ
f (τ ,
x) is related to the Schr
¨
odinger Picture
operator
ˆ
f (
x)by
ˆ
f (τ ,
x) = ˆρ
−1
GC
(τ ) ·
ˆ
f (
x ) · ˆρ
GC
(τ ). (10.5.16)
(b) τ/∈ [0, β].
As for τ/∈ [0, β], the functional derivative of ˆρ
GC
(β;[J, η, η]) with respect to
{J,
η, η} vanishes.
In order to derive the equation of motion for the partition function, we use the
‘‘equation of motion’’ of
ˆ
ψ
E α
(τ ,
x)and
ˆ
φ(τ ,
x),
iγ
k
∂
k
+iγ
4
∂
∂τ
− µ
− m + gγ
ˆ
φ(τ ,
x )
β,α
ˆ
ψ
E α
(τ ,
x ) = 0, (10.5.17)
&
ψ
E β
(τ ,
x )
iγ
k
∂
k
+ iγ
4
∂
∂τ
− µ
−m + gγ
ˆ
φ(τ ,
x)
T
β,α
= 0, (10.5.18)
∂
2
∂x
2
ν
−κ
2
ˆ
φ(τ ,
x) + gTr{γ
&
ψ
E
(τ ,
x )
ˆ
ψ
E
(τ ,
x)}=0, (10.5.19)
and the equal ‘‘time’’ canonical (anti-)commuters,
δ(τ − τ
){
ˆ
ψ
E α
(τ ,
x),
&
ψ
E β
(τ ,
x)}=δ
αβ
δ(τ − τ
)δ(
x −
x
), (10.5.20a)
δ(τ − τ
)
ˆ
φ(τ ,
x),
∂
∂τ
ˆ
φ(τ
,
x
)
= δ(τ − τ
)δ
3
(
x −
y), (10.5.20b)
with all the rest of equal ‘‘time’’ (anti-)commutators equal to 0. We obtain the
equations of motion of the partition function of the grand canonical ensemble
Z
GC
(β;[J, η, η]) = Tr ˆρ
GC
(β;[J, η, η]) (10.5.21)
in the presence of the external hook {J, η, η} from Eqs. (10.5.12), (10.5.13), and
(10.5.14) as