Mavko G., Mukerji T., Dvorkin J. The Rock Physics Handbook
Подождите немного. Документ загружается.

G
ijkl
with any permutation of a given set ijkl are equal. Note that G
ijkl
has more
symmetries than the elastic compliance tensor. For isotropic symmetry, the elements
of G
ijkl
are given by the Table 6.14.1.
Table 6.14.1 gives exactly the same result as the isotropic equations of Mavko and
Jizba (1991) presented in Section 6.10.
When the rock is transversely isotropic with the 3-axis as the axis of rotational
symmetry, the five independent components of G
ijkl
are
G
1111
¼
~
S
ðdryÞ
1111
4a
1 4a
~
S
ðdryÞ
1122
þ
~
S
ðdryÞ
1133
hi
G
1122
¼
~
S
ðdryÞ
1122
1 4a
G
1133
¼
~
S
ðdryÞ
1133
1 4a
G
3333
¼
~
S
ðdryÞ
3333
8a
~
S
ðdryÞ
1133
1 4a
G
2323
¼
~
S
ðdryÞ
2323
1 4a
~
S
ðdryÞ
1111
þ
~
S
ðdryÞ
3333
4ð1 4aÞ
þ
G
1111
þ G
3333
4
The nine independent components of G
ijkl
for orthorhombic symmetry are
G
1111
¼
~
S
ðdryÞ
1111
4a
1 4a
~
S
ðdryÞ
1122
þ
~
S
ðdryÞ
1133
hi
G
2222
¼
~
S
ðdryÞ
2222
4a
1 4a
~
S
ðdryÞ
1122
þ
~
S
ðdryÞ
2233
hi
G
3333
¼
~
S
ðdryÞ
3333
4a
1 4a
~
S
ðdryÞ
1133
þ
~
S
ðdryÞ
2233
hi
G
1122
¼
~
S
ðdryÞ
1122
1 4a
Table 6.14.1 Elements of the tensor G
ijkl
for isotropic symmetry.
ij 11 22 33 23 13 12
kl
11 1/5 1/15 1/15 0 0 0
22 1/15 1/5 1/15 0 0 0
33 1/15 1/15 1/5 0 0 0
23 0 0 0 1/15 0 0
13 00001/15 0
12 000001/15
307 6.14 Anisotropic squirt
G
1133
¼
~
S
ðdryÞ
1133
1 4a
G
2233
¼
~
S
ðdryÞ
2233
1 4a
G
2323
¼
~
S
ðdryÞ
2323
1 4a
~
S
ðdryÞ
2222
þ
~
S
ðdryÞ
3333
4ð1 4aÞ
þ
G
2222
þ G
3333
4
G
1313
¼
~
S
ðdryÞ
1313
1 4a
~
S
ðdryÞ
1111
þ
~
S
ðdryÞ
3333
4ð1 4aÞ
þ
G
1111
þ G
3333
4
G
1212
¼
~
S
ðdryÞ
1212
1 4a
~
S
ðdryÞ
1111
þ
~
S
ðdryÞ
2222
4ð1 4aÞ
þ
G
1111
þ G
2222
4
where
~
S
ðdryÞ
ijkl
¼
S
ðdryÞ
ijkl
S
ðdryÞ
ggbb
a ¼
1
4
ð
~
S
ðdryÞ
gbgb
1Þ
Computed from the dry data, a is the ratio of the representative shear-to-normal
compliance of a crack set, including all elastic interactions with other cracks. When
the orthorhombic anisotropy is due to three mutually perpendicular crack sets,
superposed on a general orthorhombic background, with the crack normals along
the three symmetry axes, the wet-frame compliances are obtained from
S
ðdryÞ
ijkl
S
ðwetÞ
ijkl
S
ðdryÞ
1111
1 þ
ð1Þ
soft
ðb
f
b
0
Þ=S
ðdryÞ
1111
d
i1
d
j1
d
k1
d
l1
þ
S
ðdryÞ
2222
1 þ
ð2Þ
soft
ðb
f
b
0
Þ=S
ðdryÞ
2222
d
i2
d
j2
d
k2
d
l2
þ
S
ðdryÞ
3333
1 þ
ð3Þ
soft
ðb
f
b
0
Þ=S
ðdryÞ
3333
d
i3
d
j3
d
k3
d
l3
where d
ij
is the Kronecker delta, and
ðiÞ
soft
refers to the soft porosity caused by the ith
crack set. The above expressions assume that the intrinsic compliance tensor of planar
crack-like features is sparse, the largest components being the normal and shear
compliances, whereas the other components are approximately zero. This general
property of planar crack formulations reflects an approximate decoupling of normal
and shear deformation of the crack and decoupling of the in-plane and out-of-plane
compressive deformation. In the case of a single crack set (with crack normals along
308 Fluid effects on wave propagation

the 3-axis) the wet-frame compliances can be calculated from the dry compliances for
a completely general, nonsparse crack compliance as
S
ðwetÞ
ijkl
¼ S
ðdryÞ
ijkl
S
ðdryÞ
llij
S
ðdryÞ
kl
S
ðdryÞ
g gdd
þ
soft
ðb
f
b
0
Þ
Little or no change of the S
ðdryÞ
1111
and S
ðdryÞ
2222
dry compliances with stress would
indicate that all the soft, crack-like porosity is aligned normal to the 3-axis. However,
a rotationally symmetric distribution of cracks may often be a better model of crack-
induced transversely isotropic rocks than just a single set of aligned cracks. In this
case the equations in terms of G
ijkl
should be used.
The anisotropic squirt formulation presented here does not assume any idealized
crack geometries. Because the high-frequency saturated compliances are predicted
entirely in terms of the measured dry compliances, the formulation automatically
incorporates all elastic pore interactions, and there is no limitation to low crack density.
Although the formulation presented here is independent of any idealized crack
shape, the squirt behavior is also implicit in virtually all published formulations for
effective moduli based on elliptical cracks (see Sections 4.7–4.11). In most of those
models, the cavities are treated as isolated with respect to flow, thus simulating the
high-frequency limit of the squirt model.
Uses
The anisotropic squirt formulation can be used to calculate high-frequency, saturated-
rock velocities from dry-rock velocities.
Assumptions and limitations
The use of the anisotropic squirt formulation requires the following considerations:
high seismic frequencies ideally suited for ultrasonic laboratory measurements are
assumed. In-situ seismic velocities will generally have neither squirt nor Biot disper-
sion and should be described by using Brown and Korringa equations. Sonic-logging
frequencies may or may not be within the range of validity, depending on the rock
type and fluid viscosity;
all minerals making up rock have the same compliances; and
fluid-bearing rock is completely saturated.
Extensions
The following extensions of the anisotropic squirt formulation can be made:
for mixed mineralogy, one can usually use an effective average modulus for b
0
;
for clay-filled rocks, it often works best to consider the “soft” clay to be part of the
pore-filling phase rather than part of the mineral matrix. The pore fluid is then
“mud,” and its modulus can be estimated with an isostress calculation.
309 6.14 Anisotropic squirt

6.15 Common features of fluid-related velocity dispersion
mechanisms
Synopsis
Many physical mechanisms have been proposed and modeled to explain velocity
dispersion and attenuation in rocks: scattering (see Section 3.14), viscous and inertial
fluid effects (see Sections 6.1, 6.2,and6.10–6.19), hysteresis related to surface forces,
thermoelastic effects, phase changes, and so forth. Scattering and surface forces appear
to dominate in dry or nearly dry conditions (Tutuncu, 1992; Sharma and Tutuncu,
1994). Viscous fluid mechanisms dominate when there is more than a trace of pore
fluids, such as in the case of the poroelasticity described by Biot (1956)andthelocal
flow or squirt mechanism (Stoll and Bryan, 1970;MavkoandNur,1975; O’Connell and
Budiansky, 1977; Stoll, 1989; Dvorkin and Nur, 1993). Extensive reviews of these were
given by Knopoff (1964), Mavko, Kjartansson, and Winkler (1979), and Bourbie
´
et al.
(1987), among others. Extensive reviews of these were given by Winkler (1985, 1986).
This section highlights some features that attenuation–dispersion models have in
common. These suggest a simple approach to analyzing dispersion, bypassing some
of the complexity of the individual theories, complexity that is often not warranted
by available data.
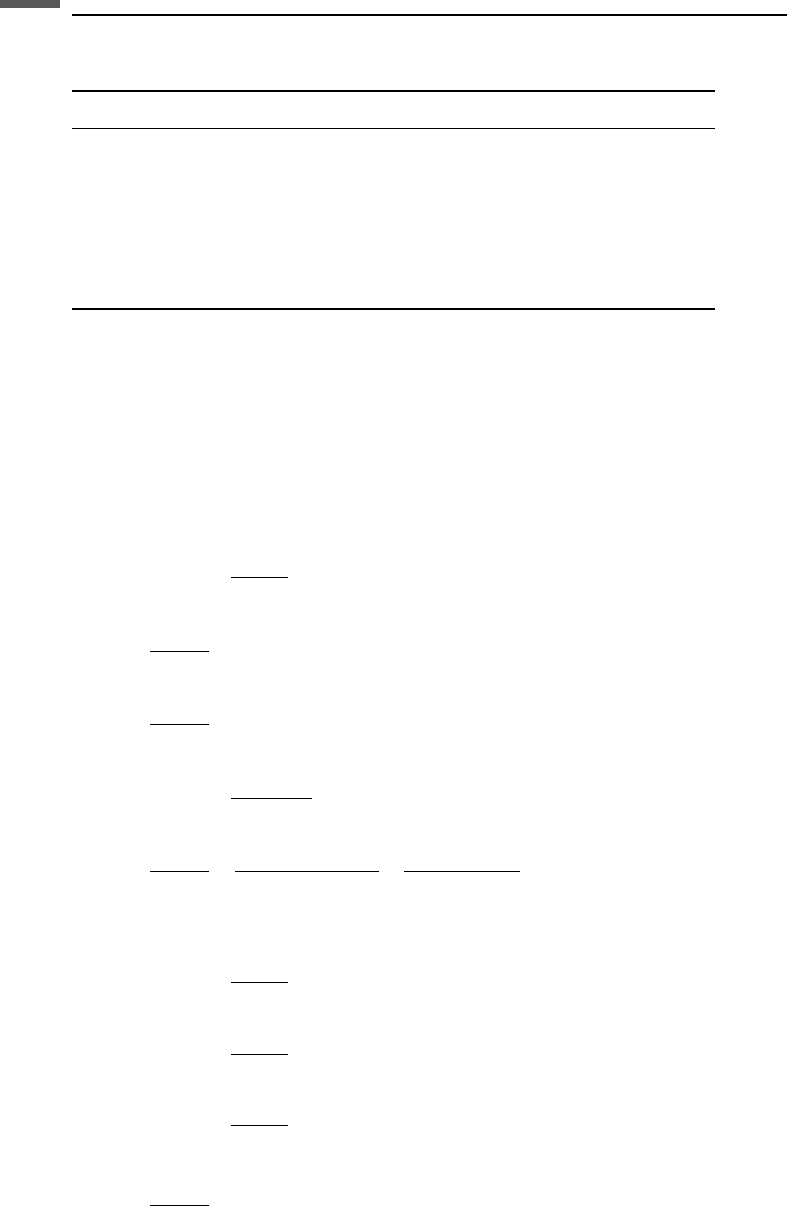
Although the various dispersion mechanisms and their mathematical descriptions are
distinct, most can be described by the following three key parameters (see Figure 6.15.1):
1. a low-frequency limiting velocity V
0
(or modulus, M
0
) often referred to as the
“relaxed” state;
2. a high-frequency limiting velocity V
1
(or modulus, M
1
) referred to as the
“unrelaxed” state;
3. a characteristic frequency, f
c
, that separates high-frequency behavior from low-
frequency behavior and specifies the range in which velocity changes most rapidly.
High- and low-frequency limits
Of the three key parameters, usually the low- and high-frequency limits can be
estimated most easily. These require the fewest assumptions about the rock micro-
geometry and are, therefore, the most robust. In rocks, the velocity (or modulus)
generally increases with frequency (though not necessarily monotonically in the case
of scattering), and thus M
1
> M
0
. The total amount of dispersion between very
low-frequency and very high-frequency (M
1
– M
0
)/M ¼DM/M is referred to as the
modulus defect (Zener, 1948), where M ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi
M
0
M
1
p
:
One of the first steps in analyzing any dispersion mechanism should be to estimate
the modulus defect to see whether the effect is large enough to warrant any additional
modeling. In most situations all but one or two mechanisms can be eliminated based
on the size of the modulus defect alone.
310 Fluid effects on wave propagation
As an example, consider the local flow or squirt mechanism, which is discussed in
Sections 6.10–6.14 and 6.17. The squirt model recognizes that natural heterogeneities
in pore stiffnessess, pore orientation, fluid compressibility, and saturation can cause
spatial variations in wave-induced pore pressures at the pore scale. At sufficiently low
frequencies, there is time for the fluid to flow and eliminate these variations; hence,
the very low-frequency limiting bulk and shear moduli can be predicted by Gassmann’s
theory (Section 6.3), or by Brown and Korringa’s theory (Section 6.5)iftherockis
anisotropic. At high frequencies, the pore-pressure variations persist, causing the rock
to be stiffer. The high-frequency limiting moduli may be estimated from dry-rock data
using the Mavko and Jizba method (Section 6.10). These low- and high-frequency
limits are relatively easy to estimate and require minimum assumptions about pore
microgeometry. In contrast, calculating the detailed frequency variation between
the low- and high-frequency regimes requires estimates of the pore aspect-ratio or
throat-size distributions.
Other simple estimates of the high- and low-frequency limits associated with the
squirt mechanism can be made by using ellipsoidal crack models such as the Kuster
and Tokso
¨
z model (Section 4.7), the self-consistent model (Section 4.8), the DEM
model (Section 4.9), or Hudson’s model (Section 4.10). In each case, the dry rock is
modeled by setting the inclusion moduli to zero. The high-frequency saturated rock
conditions are simulated by assigning fluid moduli to the inclusions. Because each
model treats the cavities as isolated with respect to flow, this yields the unrelaxed
moduli for squirt. The low-frequency saturated moduli are found by taking the model-
predicted effective moduli for dry cavities and saturating them with the Gassmann
low-frequency relations (see Section 6.3).
The characteristic frequency is also simple to estimate for most models but
usually depends more on poorly determined details of grain and pore microgeometry.
Hence, the estimated critical frequency is usually less robust. Table 6.15.1 summarizes
0
0.1
0.2
0.3
0.4
0.5
0.6
0
0.5
1
1.5
2
−50 5
1/Q (∆M/M)
Modulus (M/M
0
)
log(f
0
/f )
1/Q
M
∆M
M
0
M
∞
Figure 6.15.1 Key parameters in various dispersion mechanisms: M
0
, the low-frequency limiting
modulus, M
1
, the high-frequency limiting modulus, and f
c
, the characteristic frequency separating
high- and low-frequency behavior.
311 6.15 Common features of fluid-related velocity dispersion
Table 6.15.1 High- and low-frequency limits and characteristic frequency of dispersion mechanisms.
Mechanism
a
Low-frequency limit
a
High-frequency limit
a
Characteristic frequency (f
c
)
Biot [6.1] Gassmann’s relations [6.3] Biot’s high-frequency formula [6.1] f
Biot
f/2pr
fl
k
Squirt [6.10–6.14]
b Gassmann’s relations [6.3] Mavko–Jizba relations [6.10] f
squirt
K
0
a
3
/
c Kuster–Tokso
¨
z dry relations [4.7] ! Gassmann Kuster–Tokso
¨
z saturated relations ”
c DEM dry relations [4.9] ! Gassmann DEM saturated relations ”
c Self-consistent dry relations [4.8] ! Gassmann Self-consistent saturated relations ”
d Hudson’s dry relations [4.10] ! Brown and Korringa [6.5] Hudson’s saturated relations ”
Patchy saturation [6.17, 6.18]
e Gassmann’s relations [6.3] Hill equation [4.5] f
patchy
k/L
2
(b
p
þ b
fl
)
f Gassmann’s relations [6.3] White high-frequency formula [6.18] f
patchy
kK
s
/pL
2
g Generalized Gassmann’s relations [6.6] Dutta–Ode
´
high-frequency formula [6.18] ”
Viscous shear
Scattering [3.10–3.14]
hhf
visc.crack
am/2p
i Effective medium theory [4.1–4.15] Ray theory [3.11–3.13] f
scatter
V/2pa
j Backus average [4.13] Time average [3.11–3.13] ”
a
Numbers in brackets [ ] refer to sections in this book.
b
Inputs are measured dry-rock moduli; no idealized pore geometry.
c
Pore space is modeled as idealized ellipsoidal cracks.
d
Anisotropic rock modeled as idealized penny-shaped cracks with preferred orientations.
e
Dry rock is homogeneous; saturation has arbitrarily shaped patches.
f
Dry rock is homogeneous; saturation is in spherical patches. Same limits as
e
.
g
Dry rock can be heterogeneous; saturation is in spherical patches.
h
The mechanism modeled by Walsh (1969) is related to shearing of penny-shaped cracks with viscous fluids. Interesting only for extremely high viscosity or extremely high
frequency.
i
General heterogeneous three-dimensional medium.
j
Normal-incidence propagation through a layered medium.
f ¼ porosity, L ¼ characteristic size (or correlation length), K
0
, m ¼ bulk and shear moduli of mineral of saturation heterogeneity, K
s
¼ saturated rock modulus, r
fl
¼ density
of the pore fluid, b
fl
¼ compressibility of the pore fluid, ¼ viscosity of the pore fluid, b
p
¼ compressibility of the pore space, a ¼ pore aspect ratio, a ¼ characteristic size
(or correlation length) of scatterers, k ¼ rock permeability, V ¼ wave velocity at f
c
.
approaches to estimating the low-frequency moduli, high-frequency moduli, and char-
acteristic frequencies for five important categories of velocity dispersion and attenuation.
Each mechanism shown in the table has an f
c
value that depends on poorly determined
parameters. The Biot (see Section 6.1)andpatchy(seeSection 6.17) models depend on
the permeability. The squirt (see Sections 6.10–6.14) and viscous shear (Walsh, 1969)
models require the crack aspect ratio. Furthermore, the formula for f
c
–squirt is only a
rough approximation, for the dependence on a
3
is of unknown reliability. The patchy-
saturation (see Section 6.17) and scattering (see Sections 3.10–3.14) models depend on
the scale of saturation and scattering heterogeneities. Unlike the other parameters, which
are determined by grain and pore size, saturation and scattering can involve all scales,
ranging from the pore scale to the basin scale.
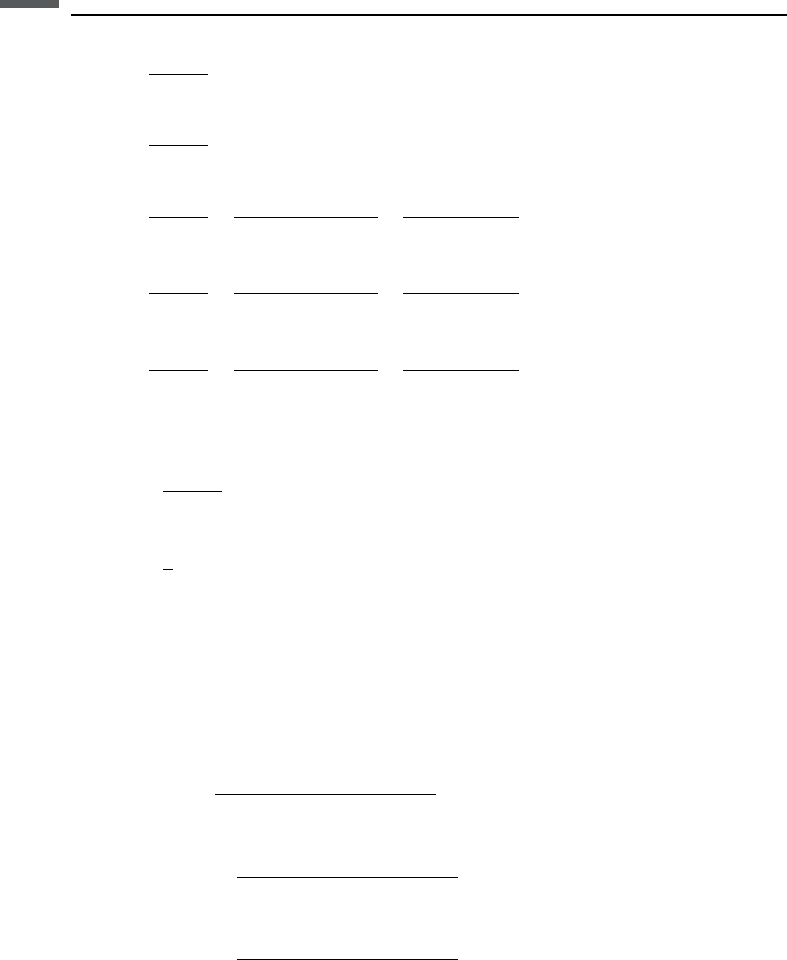
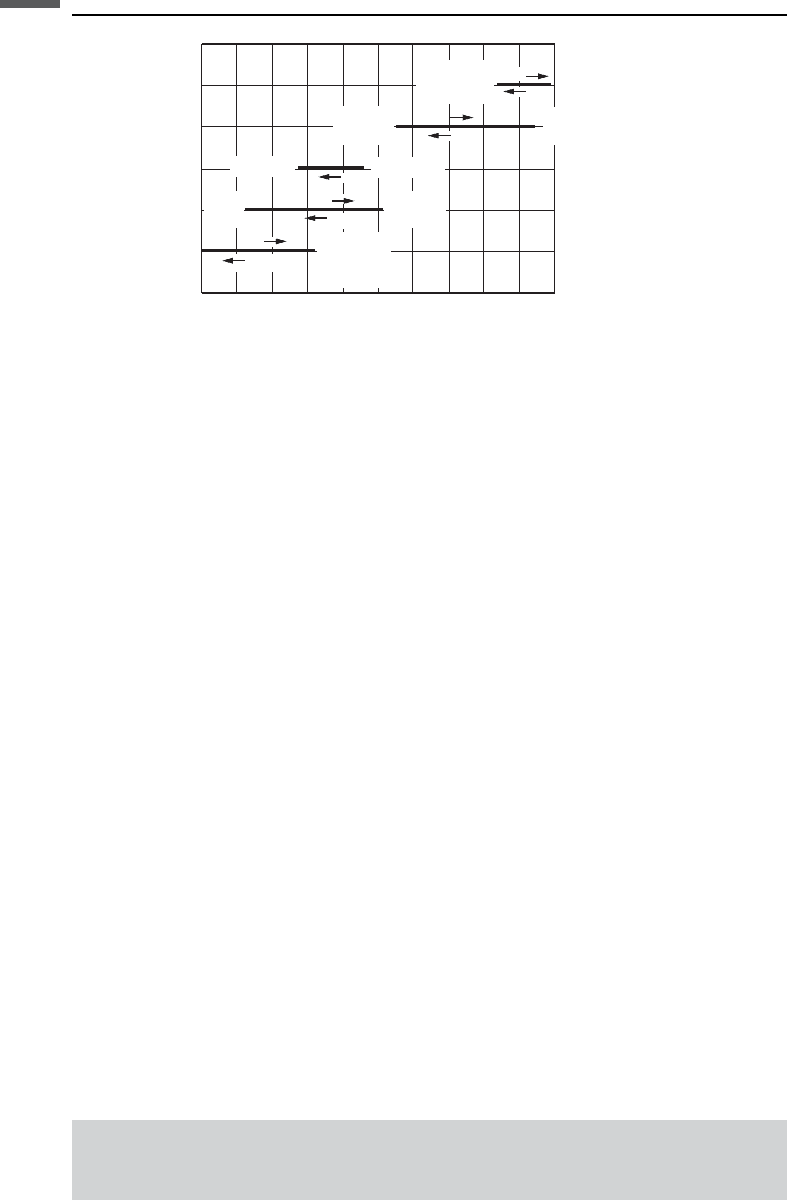
Figure 6.15.2 compares some values for f
c
predicted by the various expressions in
the table. The following parameters (or ranges of parameters) were used:
f ¼0.2 ¼porosity
r
fl
¼1.0 g/cm
3
¼fluid density
¼1–10 cP ¼fluid viscosity
k ¼1–1000 mD ¼permeability
a ¼10
–3
–10
–4
¼crack aspect ratio
V ¼3500 m/s ¼wave velocity
a, L ¼0.1–10 m ¼characteristic scale of heterogeneity
m ¼17 GPa ¼rock shear modulus
K ¼18 GPa ¼rock bulk modulus
Caution
Other values for rock and fluid parameters can change f
c
considerably.
10
−1
10
1
10
3
10
5
10
7
10
9
Critical frequency f
c
(Hz)
Biot
Squirt
Patchy saturation
Viscous shear
Scattering
a =10
−4
a =10
−3
a =10
−4
h = 10 cP
h = 10 cP
h = 10 cP
h = 1 cP
h = 1 cP
h = 1 cP
k = 1 mD
k =1 D
k =1 D
a = 10 m
a = 0.1 m
L = 0.1 m
k
k
h
h
a
a
a
h
h,L
Figure 6.15.2 Comparison of characteristic frequencies for typical rock and fluid parameters.
Arrows show the direction of change as the labeled parameter increases.
313 6.15 Common features of fluid-related velocity dispersion
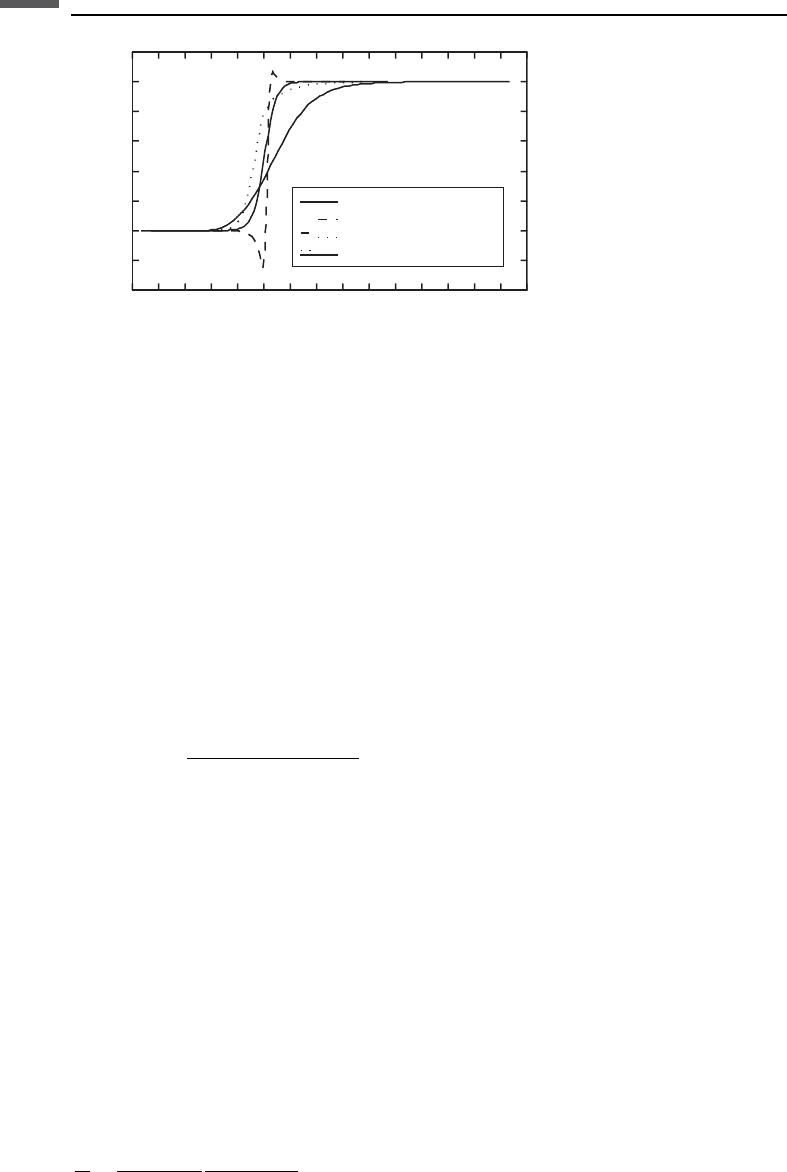
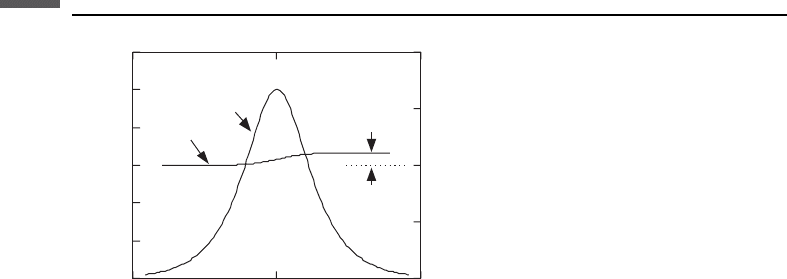
Complete frequency dependence
Figure 6.15.3 compares the complete normalized velocity-versus-frequency depend-
ence predicted by the Biot, patchy-saturation, and scattering models. Although there are
differences, each follows roughly the same trend from the low-frequency limits to the
high-frequency limits, and the most rapid transition is in the range f f
c
. This is not
always strictly true for the Biot mechanism, where certain combinations of parameters
can cause the transition to occur at frequencies far from f
Biot
. All are qualitatively
similar to the dispersion predicted by the standard linear solid (see Section 3.8):
ReðMðo ÞÞ ¼
M
0
M
1
1 þ f =f
c
ðÞ
2
hi
M
1
þ f =f
c
ðÞ
2
M
0
Because the value of f
c
and the resulting curves depend on poorly determined
parameters, we suggest that a simple and practical way to estimate dispersion curves
is to use the standard linear solid. The uncertainty in the rock microgeometry,
permeability, and heterogeneous scales – as well as the approximations in the theories
themselves – often makes a more detailed analysis unwarranted.
Attenuation
The Kramers–Kronig relations (see Section 3.9) completely specify the relation
between velocity dispersion and attenuation. If velocity is known for all frequencies,
then attenuation is determined for all frequencies. The attenuation versus frequency
for the standard linear solid is given by
1
Q
¼
M
1
M
0
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi
M
1
M
0
p
f =f
c
1 þ f =f
c
ðÞ
2
−0.4
−0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
10
−5
10
−3
0.1 10 10
3
10
5
10
7
10
9
Biot dispersion
Scattering dispersion
Patchy dispersion
Standard linear solid
f /f
c
(V − V
0
)/(V
∞
− V
0
)
Figure 6.15.3 Comparison of the complete normalized velocity-versus-frequency dependence
predicted by the Biot, patchy-saturation, and scattering models.
314 Fluid effects on wave propagation
Similarly, it can be argued (see Section 3.8) that, in general, the order of magnitude of
attenuation can be determined from the modulus defect:
1
Q
M
1
M
0
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi
M
1
M
0
p
Uses
The preceding simplified relations can be used to estimate velocity dispersion and
attenuation in rocks.
Assumptions and limitations
This discussion is based on the premise that difficulties in measuring attenuation and
velocity dispersion, and in estimating aspect ratios, permeability, and heterogeneous
scales, often make detailed analysis of dispersion unwarranted. Fortunately, much
about attenuation–dispersion behavior can be estimated robustly from the high- and
low-frequency limits and the characteristic frequency of each physical mechanism.
6.16 Dvorkin–Mavko attenuation model
Synopsis
Dvorkin and Mavko (2006) present a theory for calculating the P- and S-wave
inverse quality factors (Q
1
P
and Q
1
S
, respectively) at partial and full saturation. The
basis for the quality factor estimation is the standard linear solid (SLS) model
(Section 3.8) that links the inverse quality factor Q
1
to the corresponding elastic
modulus M versus frequency f dispersion as
Q
1
ðf Þ¼
ðM
1
M
0
Þðf =f
c
Þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi
M
0
M
1
p
½1 þðf =f
c
Þ
2
where M
0
and M
1
are the low- and high-frequency limits of the modulus M,
respectively; and f
c
is the critical frequency at which the inverse quality factor is
maximum.
Partial water saturation
Consider rock in which K
dry
is the bulk modulus of the dry frame of the rock; K
mineral
is the bulk modulus of the mineral phase; and f is the total porosity. Its bulk modulus
at partial water saturation S
W
is (according to Gassmann’s equation)
K
0
¼ K
mineral
K
dry
ð1 þ ÞK
fl
K
dry
=K
mineral
þ K
fl
ð1 ÞK
fl
þ K
mineral
K
fl
K
dry
=K
mineral
315 6.16 Dvorkin–Mavko attenuation model
where K
fl
is the bulk modulus of the pore fluid which is a uniform mixture of water
with the bulk modulus K
W
and hydrocarbon (e.g., gas) with the bulk modulus K
G
:
1
K
fl
¼
S
W
K
W
þ
1 S
W
K
G
Then the compressional modulus M
0
is obtained from K
0
and the shear modulus of
the dry frame m
dry
as
M
0
¼ K
0
þ
4
/
3
m
dry
Alternatively, to obtain M
0
, one may use the approximate V
P
-only fluid-substitution
equation with the dry-frame compressional modulus M
dry
and the mineral-phase
compressional modulus M
mineral
:
M
0
¼ M
mineral
M
dry
ð1 þ ÞK
fl
M
dry
=M
mineral
þ K
fl
ð1 ÞK
fl
þ M
mineral
K
fl
M
dry
=M
mineral
The compressional modulus M
0
thus obtained (either by Gassmann’s equation or V
P
-
only fluid-substitution) is considered the low-frequency limit of the compressional
modulus M.
The high-frequency limit of the compressional modulus M
1
is calculated using the
patchy-saturation equations (Section 6.17). It is assumed that the difference between
M
0
and M
1
is nonzero only at water saturation larger than the irreducible water
saturation S
irr
. For S
W
S
irr
, M
1
¼ M
0
, i.e., Q
1
P
¼ 0.
For S
W
> S
irr
1
K
1
þ
4
3
m
dry
¼
ðS
W
S
irr
Þ=ð1 S
irr
Þ
K
P
þ
4
3
m
dry
þ
ð1 S
W
Þ=ð1 S
irr
Þ
K
mineral
-
irr
þ
4
3
m
dry
where
K
P
¼ K
mineral
K
dry
ð1 þ ÞK
W
K
dry
=K
mineral
þ K
W
ð1 ÞK
W
þ K
mineral
K
W
K
dry
=K
mineral
K
mineral
-
irr
¼ K
mineral
K
dry
ð1 þ ÞK
fl
-
irr
K
dry
=K
mineral
þ K
fl
-
irr
ð1 ÞK
fl
-
irr
þ K
mineral
K
fl
-
irr
K
dry
=K
mineral
1
K
fl
-
irr
¼
S
irr
K
W
þ
1 S
irr
K
G
Then the high-frequency limit of the compressional modulus M
1
is
M
1
¼ K
1
þ
4
3
m
dry
and the inverse P-wave quality factor Q
1
P
is calculated from the SLS dispersion
equation as presented at the beginning of this section.
316 Fluid effects on wave propagation