Михайлов В.С, Кудрявцев В.Г, Давыдов В.С. Навигация и лоция
Подождите немного. Документ загружается.

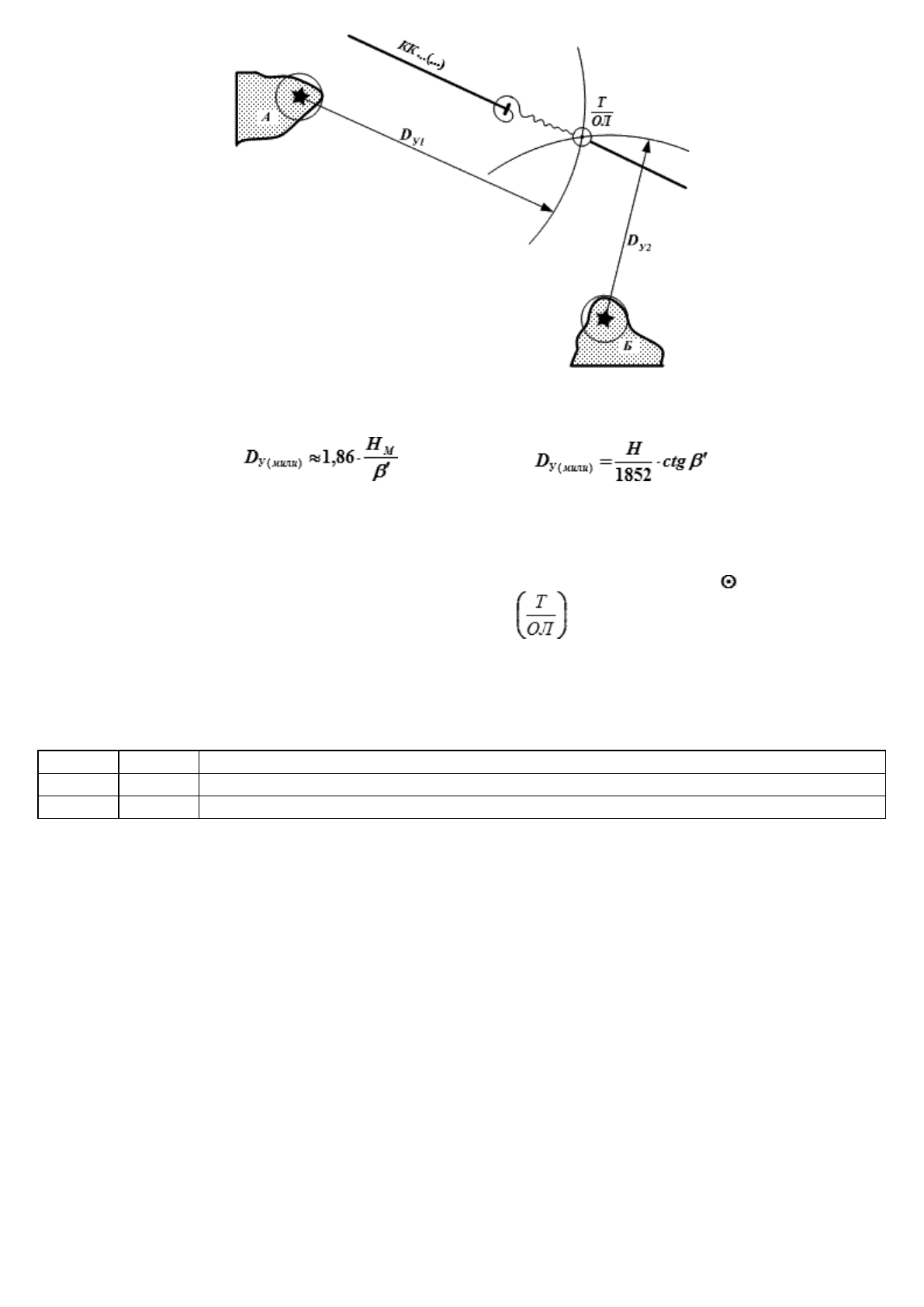
Рис. 14.5. Определение места судна по расстояниям до двух ориентиров
(14.6), или (14.5)
рассчитать расстояния до первого и второго ориентиров (D
У1
, D
У2
).
7. На карте из места 1-го ориентира А провести окружность (ее дугу) радиусом D
У1
, а из места 2-го
ориентира Б – дугу окружности радиусом D
У2
(рис. 14.5).
8. Точку пересечения двух окружностей (их дуг) обозначить условным знаком ( ) – обсервованное
место и рядом с ним подписать время и отсчет лага .
9. На момент измерения углов (Т) найти счислимую точку, обозначить невязку, снять ее
направление и величину (С = 110° – 1,9 мили).
10. Оформить запись в судовом журнале.
09
10
ОЛ = 49,1 М
К
«А» ОС = 0°03,2′; h = 23 м М
К
«Б» ОС = 0°05,2′
–
–
h = 27 м, i + S = +0,8′, e = 5 м, С = 110° – 1,9 мили
Рассмотренный способ определения места довольно трудоемкий и на практике применяется очень
редко.
14.2.2. Определение места судна по расстояниям до трех ориентиров, измеренных с помощью
навигационной РЛС
Этот способ является наиболее удобным и точным.
Измеренному расстоянию до какого-либо ориентира соответствует навигационная изолиния –
окружность с центром в точке ориентира, до которого измерялось расстояние и радиусом, равным
истинному значению этого расстояния.
Для получения обсервованного места достаточно одновременно (почти одновременно) измерить
расстояния до трех ориентиров. Точка пересечения навигационных изолиний – окружностей (их дуг)
радиусами D
1
, D
2
и D
3
– даст нам обсервованное место судна.
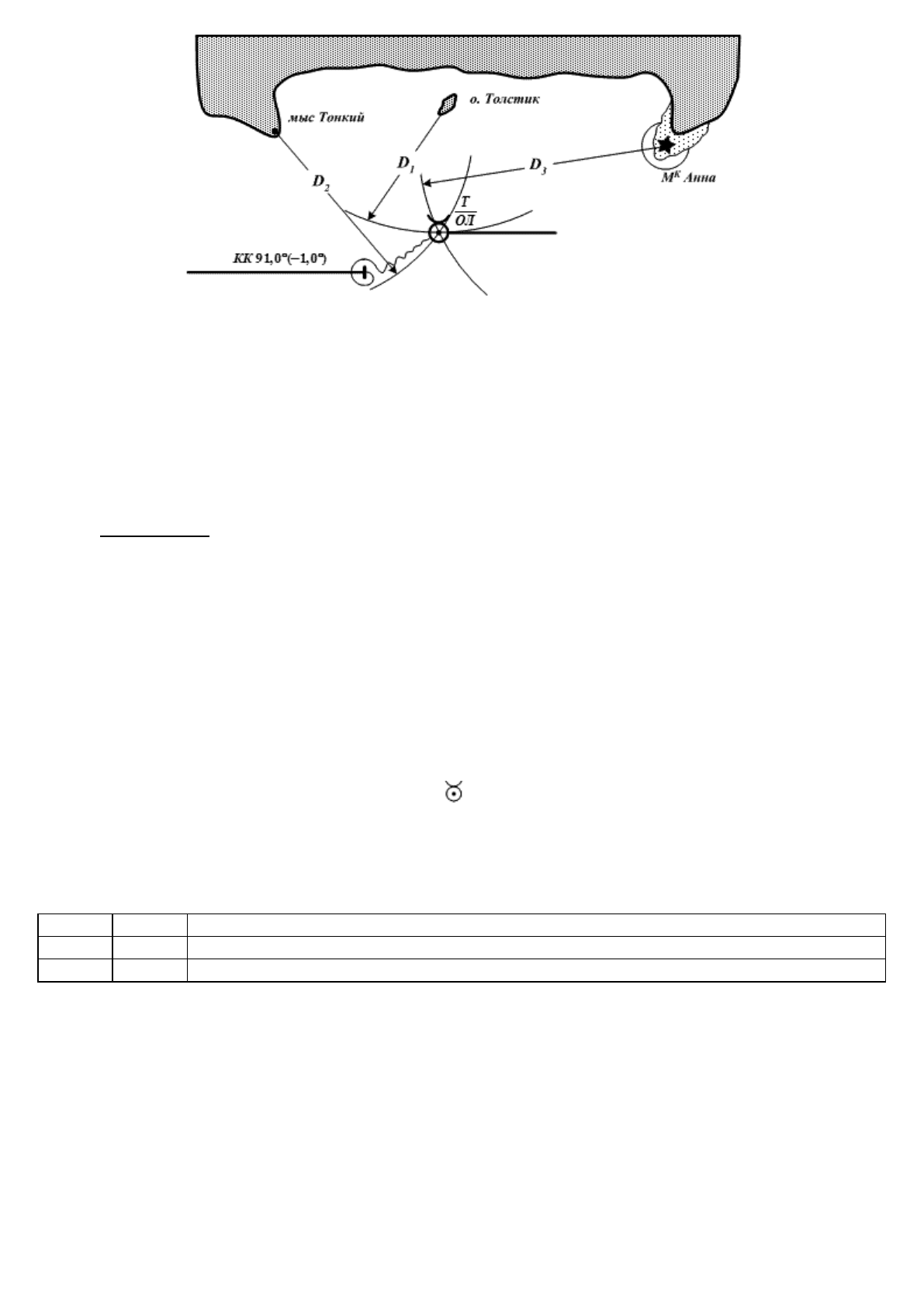
Рис. 14.6. Определение места судна по расстояниям до трех ориентиров
Выполнение способа (рис. 14.6):
1. Включить навигационную РЛС, подобрать по путевой навигационной карте три навигационных
ориентира разнесенных по горизонту.
2. В быстрой последовательности, с помощью навигационной РЛС, измерить расстояния до этих
ориентиров, заметить время (Т) и отсчет лага (ОЛ).
Первыми измеряются расстояния до ориентиров, находящихся ближе к траверзу.
Примечание:
3. Рассчитать истинные значения расстояний до ориентиров, то есть измеренные навигационной
РЛС расстояния исправить ее поправкой
D
1(2,3)
= D
P1(2,3)
+ ΔD
P
(14.9)
4. На путевой навигационной карте провести окружности (их дуги) с центрами в местах
ориентиров, до которых измерялись расстояния и радиусами, равными исправленным значениям
измеренных расстояний – R
1(2,3)
= D
1(2,3)
.
5. Точка пересечения всех трех окружностей (их дуг) и даст нам искомое обсервованное место
судна. Обозначить его условным знаком ( ) и подписать рядом с ним время (Т) и отсчет лага
(ОЛ).
6. На момент измерения расстояний до ориентиров (Т) нанести на карту счислимое место,
обозначить невязку, снять ее направление и величину (С = 58° – 1,7 мили).
7. Оформить запись в судовом журнале.
20
13
ОЛ = 84,8 о. Толстик D
Р
= 24 кб., мыс Тонкий D
Р
= 39 кб., М
К
Анна
–
–
D
Р
= 50 кб. ΔD
Р
= 0, С = 58° – 1,7 мили
Измерение расстояний до трех ориентиров для определения места, при условии пересечения всех
трех окружностей (их дуг) в одной точке однозначно указывает обсервованное место.
Если окружности (их дуги) не пересекаются в одной точке и образуют фигуру погрешностей со
стороной > 5 мм, это свидетельствует о промахах или в опознании ориентиров или в измерении
расстояний до них. При большой фигуре погрешности – повторить измерения.
14.2.3. Определение места судна по расстояниям до двух ориентиров
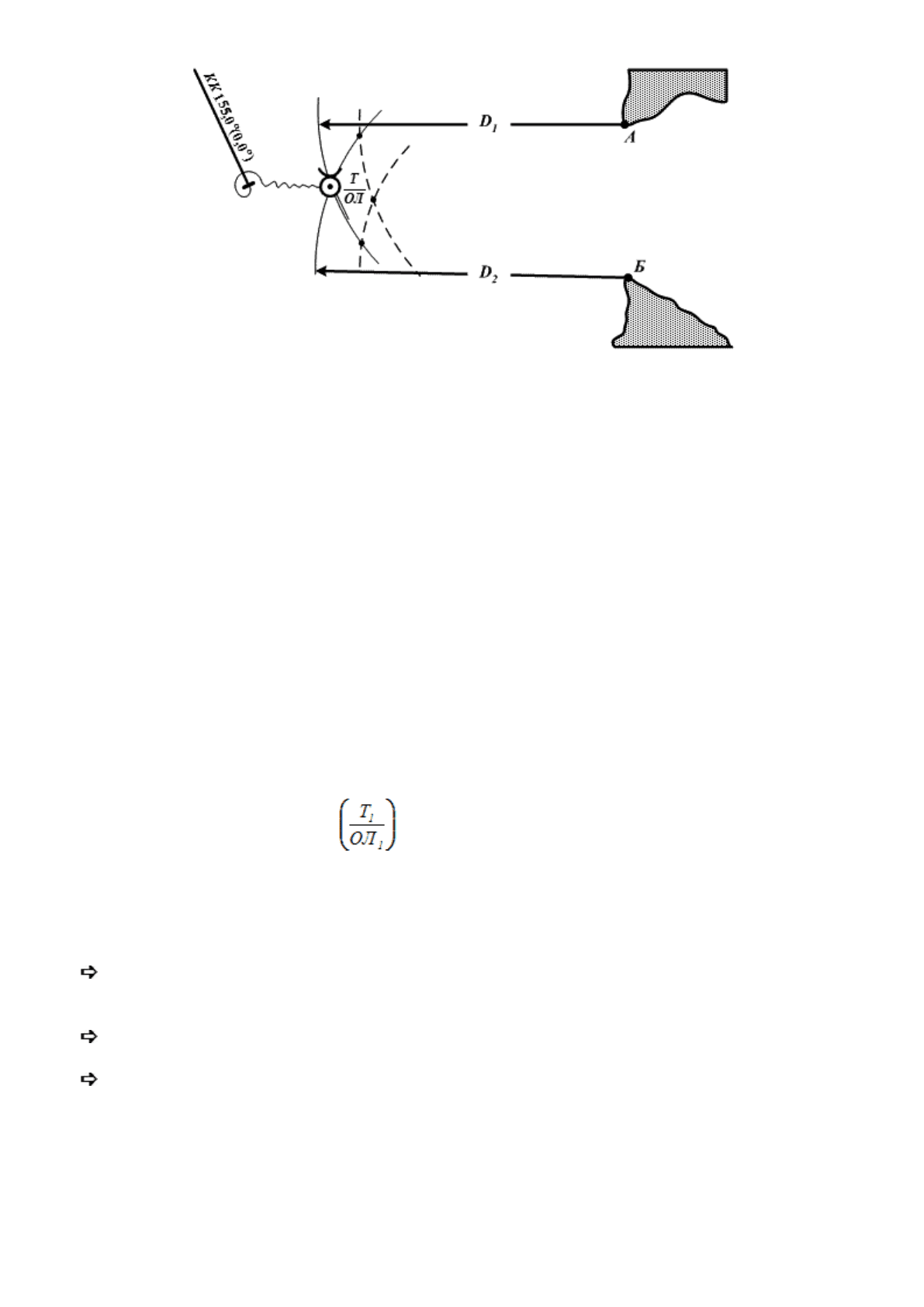
Рис. 14.7. Определение места судна по расстояниям до двух ориентиров
Если в видимости судна (на экране навигационной РЛС) имеются только два ориентира, до
которых возможно измерить расстояния, то место судна определяется по расстояниям до 2-х
ориентиров.
Методика выполнения этого определения аналогична методике определения места судна по
расстояниям до 3-х ориентиров (см. п. 14.2.2).
Недостатком этого способа определения места судна является отсутствие контроля правильности
полученного места (рис. 14.7).
Две линии (дуги) всегда пересекаются в одной точке даже при наличии погрешностей (промахов),
(есть промахи или их нет – сказать нельзя) (см. п. 13.1.2).
14.2.4. Определение места судна способом «крюйс-расстояние»
В практике судовождения может встретиться и такой случай, когда с судна наблюдается всего лишь
один ориентир, а возможности взять на него пеленг нет (туман, неисправен курсоуказатель и пр.).
В этом случае можно получить счислимо-обсервованное место судна, использовав способ «крюйс-
расстояния» → рис. 14.8.
Судно следует курсом КК 88,0° (+2,0°).
Находясь по счислению в точке , измерили расстояние до ориентира (мыс Игольный).
Пройдя этим курсом некоторое расстояние S, достаточное для изменения направления на этот
ориентир на угол не менее 30°, (т. Т
2
) повторно измерили расстояние до того же ориентира (мыс
Игольный), заметив время (Т
2
) и отсчет лага (ОЛ
2
).
Счислимо-обсервованное место судна в этом случае найдем, если выполним геометрические
построения на путевой карте:
от ориентира (т. А) проведем вспомогательную линию параллельную курсу судна (линия АБ) и
отложим по ней (от т. А) пройденное судном расстояние S за время между измерениями расстояний D
1
и
D
2
(S
л
= К
л
· РОЛ или S
об
= V
об
· t);
из точки Б проведем окружность (ее дугу) радиусом, равным истинному расстоянию до
ориентира D
1
= D
Р1
+ ΔD
Р
, где D
Р1
– первое измеренное расстояние с РЛС;
из точки А проведем окружность (ее дугу) радиусом, равным истинному расстоянию до
ориентира D
2
= D
Р2
+ ΔD
Р
, где D
Р2
– второе измеренное расстояние с РЛС.
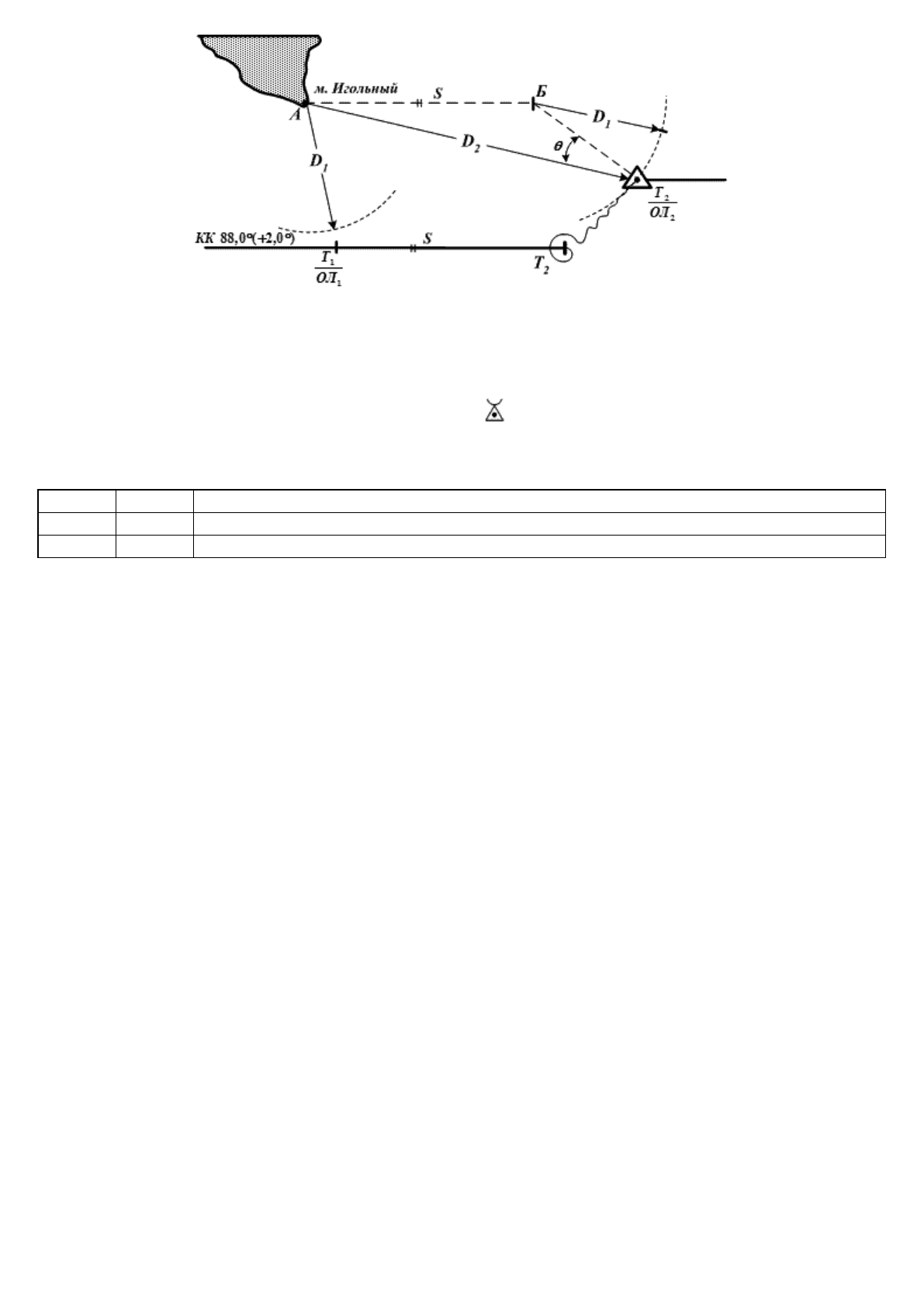
Рис. 14.8. Способ «крюйс-расстояние»
Точка пересечения этих двух окружностей (их дуг) и укажет нам счислимо-обсервованное место
судна на момент второго измерения расстояния (Т
2
).
Обозначим эту точку условным обозначением ( ), подпишем рядом с ним время (Т
2
) и отсчет
лага (ОЛ
2
).
Обозначим невязку, снимем ее направление и величину (С = 34° – 1,2 мили).
Заполним судовой журнал.
14
20
ОЛ = 15,4 мыс Игольный D
Р
= 26 кб. ΔD
Р
= 0
14
43
ОЛ = 20,0 мыс Игольный D
Р
= 69 кб. ΔD
Р
= 0 С = 34° – 1,2 мили
Точность этого способа зависит от погрешностей в измерении расстояний и погрешностей в
счислении за время плавания между замерами и величины угла θ. В практике судовождения этот способ
применяется очень редко.
14.2.5. Определение места судна по пеленгу и расстоянию до ориентира
Данный способ определения места судна относится к комбинированным.
Комбинированными называются такие способы определения места, в которых измеряются
различные навигационные параметры:
• пеленг на ориентир и расстояние до него;
• пеленг на ориентир А и горизонтальный угол между ориентирами А и Б;
• пеленг на ориентир и глубина места и др.
Рассмотрим наиболее часто употребляемый на практике способ определения места судна по
пеленгу на ориентир и расстоянию до него.
Удобство этого способа состоит в том, что для его реализации используется всего лишь один
ориентир, а навигационные изолинии – прямая линия для пеленга и окружность для расстояния –
пересекаются под оптимальным углом 90°.
Чаще всего этот способ применяется в тех случаях, когда в поле зрения наблюдается лишь один
ориентир, а на вооружении судна имеется навигационная РЛС (НРЛС).
Методика практического выполнения способа (рис. 14.9).
1. В быстрой последовательности (с помощью НРЛС) измерить направление на ориентир (РЛП) и
расстояние (дистанцию) до него. Зафиксировать время (Т) и отсчет лага (ОЛ).
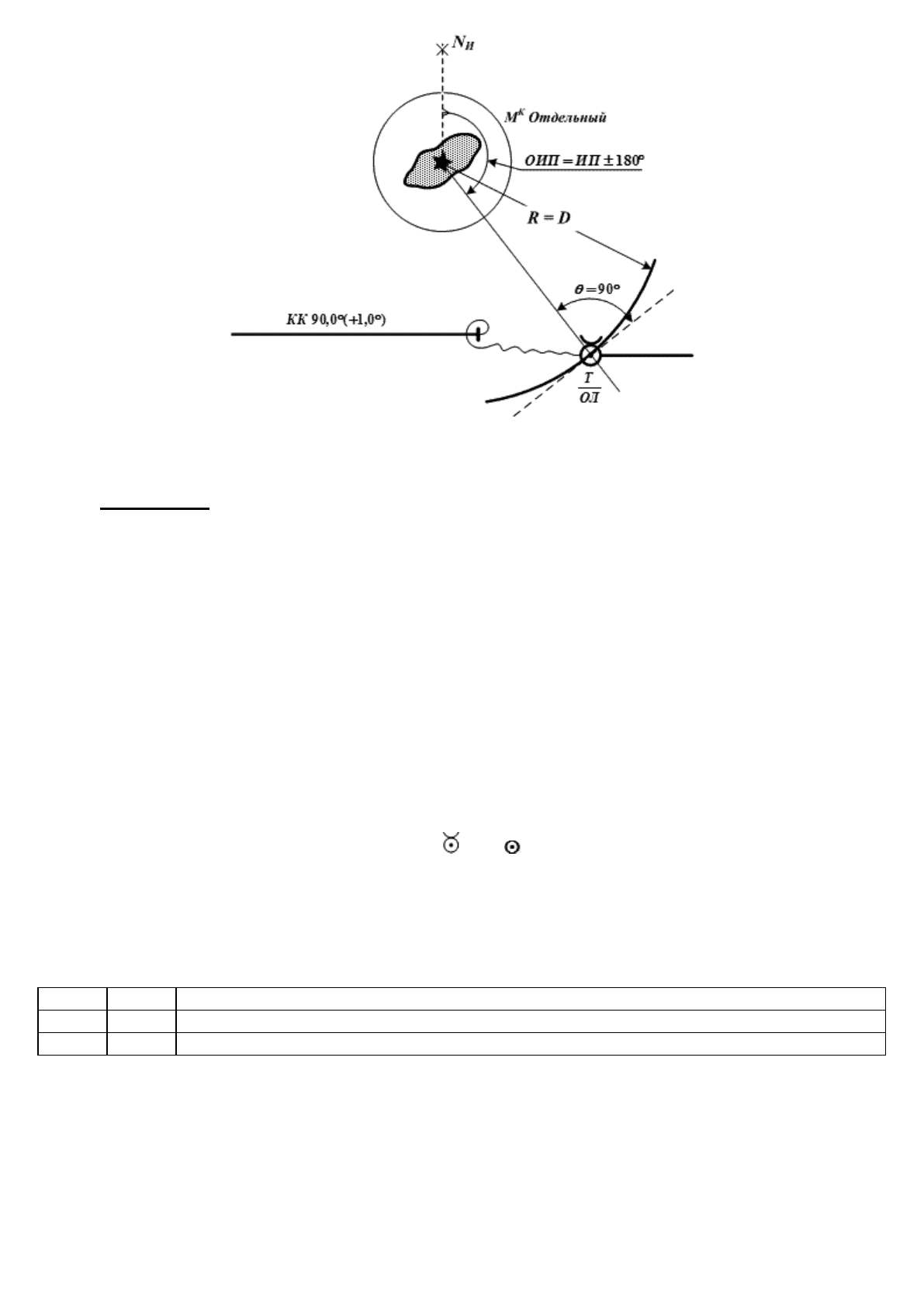
Рис. 14.9. Определение места судна по пеленгу и расстоянию до одного ориентира
Направление на ориентир (КП) можно определить и с помощью визуального пеленгатора
(ПГК-2), а расстояние до него – одним из способов измерения (получения) расстояния до
ориентира (по дальномеру, по измеренному с помощью навигационного секстана вертикальному
углу и пр.).
Примечание:
2. Исправить (при необходимости) измеренные направления (КП или РЛП) и расстояние (D
Р
)
соответствующими поправками, то есть получить истинные значения навигационных параметров
ИП = РЛП + ΔГК, ИП = ГКП + ΔГК, D = D
Р
+ ΔD
Р
3. Проложить на путевой навигационной карте изолинии:
• пеленга – прямая линия, проходящая через место ориентира;
• расстояния – окружность (ее дуга) радиусом R = D с центром в месте ориентира.
В точке пересечения навигационных изолиний условным обозначением нанести
(обозначить) обсервованное место судна ( или ), подписать рядом с ним время (Т) и отсчет
лага (ОЛ).
4. На время (Т) измерения навигационных параметров (РЛП и D
Р
) нанести на карту счислимое
место судна, обозначить невязку, снять ее направление и величину (С = 102° – 2,2 мили).
5. Заполнить судовой журнал.
20
57
ОЛ = 55,6 М
К
Отдельный: РЛП = 321,0°, ΔГК = +1,0°, D
Р
= 49 кб., ΔD
Р
= 0
-
-
С = 102° – 2,2 мили
14.2.6. Задачи по расчету расстояния до ориентира по измерению его вертикального угла (а) и
определению места судна по данным РЛС (б)
а) Расчет расстояния до ориентира по измерению его вертикального угла
№ задачи
Условие
Ответ
ОС
i +S
e (м)
Н (м)
D
У
(мили)
1
0°07,5′
+ 4,3′
6,0
26,0
4,0
2
0°03,2′
+ 4,3′
6,0
43,0
9,6
3
0°03,0′
+ 4,3′
6,0
26,0
6,5
4
0°06,3′
+ 4,3′
6,0
43,0
7,3
5
0°07,6′
+ 4,3′
6,0
43,0
6,3
6
0°03,8′
+ 4,3′
6,0
43,0
9,0
7
0°05,2′
+ 4,3′
6,0
30,0
5,8
8
0°05,8′
+ 4,3′
6,0
26,0
4,8
9
0°05,8′
+ 4,3′
6,0
43,0
7,6
10
0°03,2′
+ 4,3′
6,0
26,0
6,3
11
0°08,5′
+ 4,3′
6,0
43,0
6,2
12
0°07,6′
+ 4,3′
6,0
43,0
6,4
13
0°03,6′
+ 4,3′
6,0
46,0
9,7
14
0°12,0′
+ 4,3′
6,0
30,0
3,4
15
0°07,0′
+ 4,3′
6,0
26,0
4,2
16
0°03,8′
+ 4,3′
6,0
43,0
9,0
17
0°03,8′
+ 4,3′
6,0
26,0
5,9
18
0°04,6′
+ 4,3′
6,0
46,0
8,9
19
0°08,0′
+ 4,3′
6,0
43,0
6,4
20
0°03,4′
+ 4,3′
6,0
43,0
9,3
21
0°06,4′
+ 4,3′
6,0
30,0
5,2
22
0°07,5′
+ 4,3′
6,0
37,0
5,8
б) Определение места судна по данным РЛС (МНК № 32106 или МНК № 3207)
№
задачи
Условие
Ответ
С = …°–…
мили
1
φ
c
= 44°45,8′N, λ
c
= 37°07,4′E, м. Анапский: D
P
= 101 кб. о. Утриш: D
P
= 101 кб.
ΔD
P
= – 0,1 мили. С = ?
90° –
1,0 мили
2
φ
c
= 44°03,3′N, λ
c
= 37°11,0′E, М
К
Утриш: РЛП = 77,0°, ΔГК= –2,0°, о. Утриш:
D
P
= 74 кб. ΔD
P
= – 0,2 мили. С = ?
75° – 0,5
мили
3
φ
c
= 44°40,0′N, λ
c
= 37°23,5′E, м. Утриш: D
P
= 54 кб., м. Утришенок: D
P
= 51 кб.
ΔD
P
= 0, С = ?
270° –
0,6 мили
4
φ
c
= 44°35,0′N, λ
c
= 37°21,4′E, М
К
Утришенок: РЛП = 28,0°, ΔГК= +2,0°. м.
Утришенок: D
P
= 81 кб. ΔD
P
= 0,1 мили. С = ?
30° – 0,6
мили
5
φ
c
= 44°33,3′N, λ
c
= 37°46,3′E, м. Мысхако: D
P
= 55 кб., м. Тонкий: D
P
= 100 кб.
ΔD
P
= 0, С = ?
300° – 0,8
мили
6
φ
c
= 43°58,2′N, λ
c
= 38°55,7′E, М
К
Кодошский: РЛП = 38,0°, ΔГК= –3,0°. м.
Кодош: D
P
= 95 кб. ΔD
P
= +0,2 мили. С = ?
250° – 0,8
мили
7
φ
c
= 44°06,0′N, λ
c
= 38°55,9′E, м. Кодош: D
P
= 52 кб. м. Широкий: D
P
= 43 кб.
ΔD
P
= –0,2 мили, С = ?
300° – 0,6
мили
8
φ
c
= 44°32,3′N, λ
c
= 37°48,6′E, М
К
Дообский: РЛП = 37,0°, ΔГК = +3,0°. Св.зн.
Суджукский: D
P
= 80 кб. ΔD
P
= –0,1 мили. С = ?
220° – 0,5
мили
9
φ
c
= 44°26,1′N, λ
c
= 37°55,3′E, М
К
Геленджикский: РЛП = 48,0°, ΔГК= –3,0°. м.
Толстый: D
P
= 92 кб. ΔD
P
= –0,1 мили. С = ?
300° – 1,0
мили
10
φ
c
= 44°14,2′N, λ
c
= 38°35,1′E, М
К
Джубский: РЛП = 62,0°, ΔГК = –2,0°. м.
Гуавга: D
P
= 113 кб. ΔD
P
= –0,2 мили. С = ?
300° – 1,1
мили

Выводы
1. Расстояния до видимых навигационных ориентиров в море определяются как визуально, так и с
помощью технических средств.
2. Место судна в море можно определить по расстояниям до 3-х, до 2-х ориентиров, а также и до
одного ориентира способом «крюйс-расстояние».
3. При наличии на судне навигационной РЛС довольно точно можно определить место судна в
море по пеленгу и расстоянию до одного (точечного) ориентира.
4. Наиболее точно место судна может быть определено по расстояниям до 3-х и более ориентиров.
5. Способ определения места судна в море по расстояниям до ориентиров, рассчитанных по их
вертикальным углам, довольно сложен и применяется крайне редко.
6. Наиболее быстрый и достаточно точный способ определения места судна в море по пеленгу и
расстоянию до одного (точечного) ориентира по данным судовой РЛС.
ГЛАВА 15. КОМБИНИРОВАННЫЕ И ПРИБЛИЖЕННЫЕ СПОСОБЫ
ОПРЕДЕЛЕНИЯ МЕСТА СУДНА
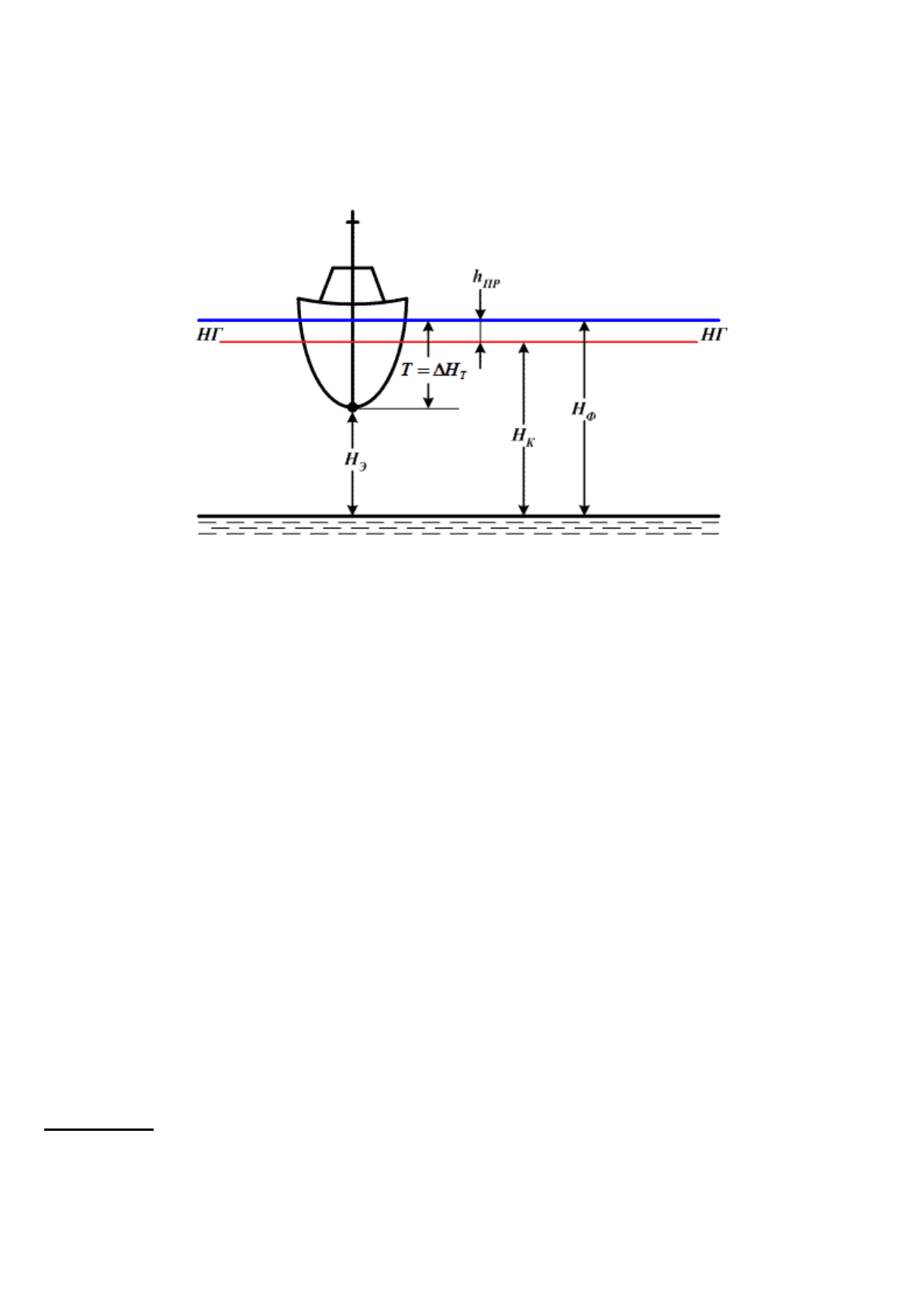
15.1. Использование эхолота для определения места судна
15.1.1. Измерение глубин эхолотом
Для сравнения глубины, измеренной эхолотом Н
Э
, с глубиной показанной в данном месте на
навигационной морской карте (Н
К
), необходимо учесть поправки (рис. 15.1).
Рис. 15.1. Поправки глубины, измеренной эхолотом
Н
К
= Н
Э
+ ΔH
T
+ ΔН
ПР
+ ΔH
υ
(15.1)
где
Н
Э
– значение глубины, снятое с самописца или указателя глубины эхолота;
ΔH
T
– поправка за углубление вибраторов эхолота (если вибраторы установлены в днище корпуса
судна, то величина этой поправки численно равна осадке судна);
ΔН
ПР
– (для морей с приливами) – поправка за высоту прилива. Ее значение определяется с
помощью «Таблиц приливов» на время измерения глубины;
ΔH
υ
– поправка за отклонение фактической скорости звука от расчетной (1500 м/с).
Входными аргументами в эту таблицу (с. 302 «МТ-75» или табл. 2.11 «МТ-2000» с. 270) являются:
1) · глубина, измеренная эхолотом Н
Э
и 2) · разность скоростей звука ΔС = С
Ф
– С
Р
. Если ΔС «+», то и
ΔH
υ
«+» и наоборот.
Пример: Н
Э
= 100 м, С
Ф
= 1535 м/с, то ΔH
υ
= +2 м (табл. 15.1).
На МНК значения глубин указываются обычно от НГ-нуля глубин (конкретно указывается в
заголовке карты). Ее значение с помощью эхолота (вибраторы эхолота в днище корпуса судна):
• на морях без приливов:
H
К
= H
Э
+ Т ± ΔH
υ
(15.2)
• на морях с приливами:
H
К
= H
Э
+ Т ± ΔH
υ
− h
ПР
(Δh
ПР
)
(15.3)
У современных эхолотов поправки за отклонение скорости звука в воде от расчетной Δ H
υ
, за
колебание уровня моря Δ Н
ПР
и углубление вибраторов (Δ Н
Т
) могут исключаться до измерения. В этом
случае:
Примечание:
H
Э
= H
К
(15.4)
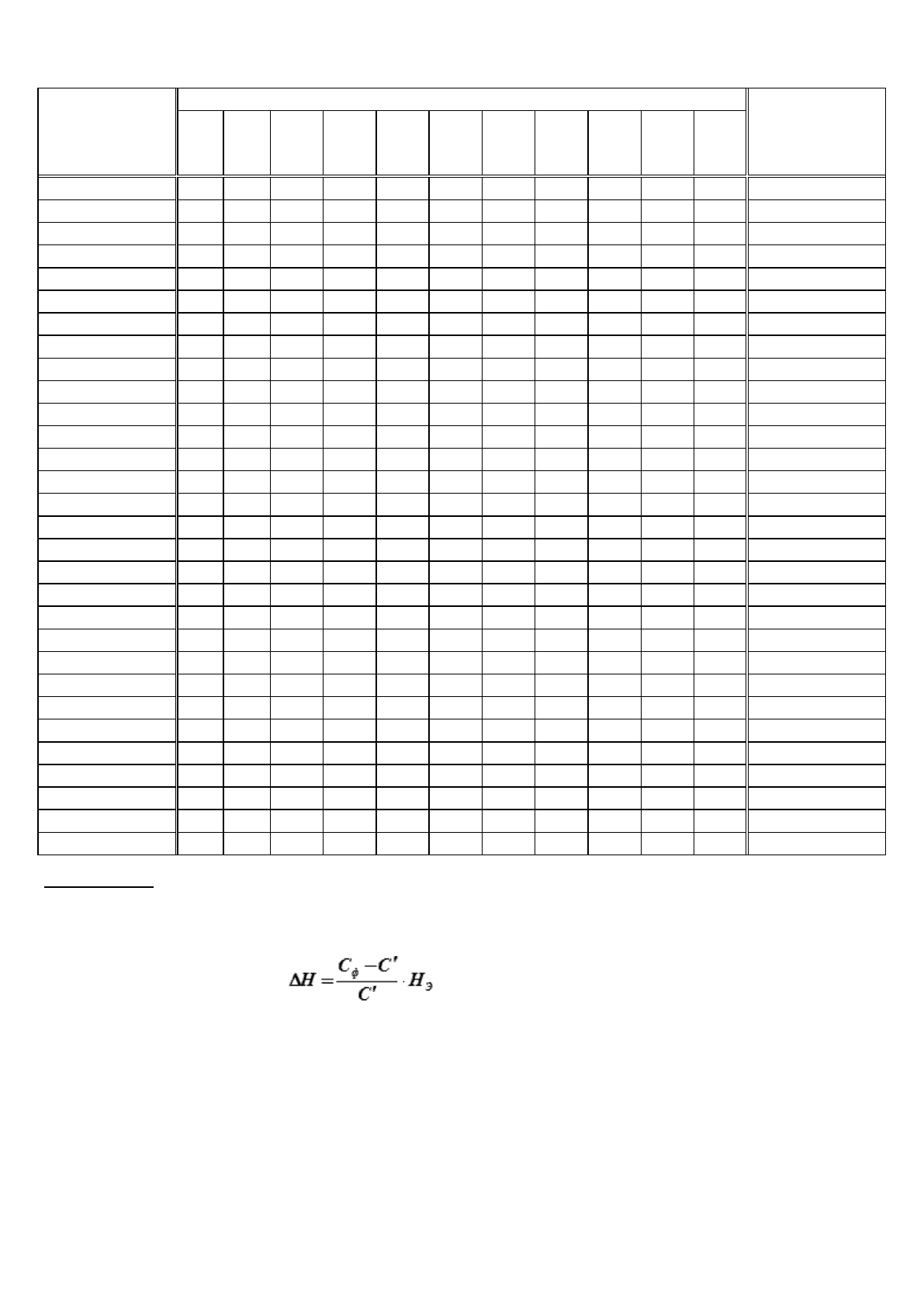
Поправка глубины, измеренной эхолотом (табл. 34в «МТ-75» или 2.11 «МТ-2000»)
Таблица 15.1
Глубина,
измеренная
эхолотом
H
Э
, м
Разность скоростей звука (С
Ф
– С′) м/с
Глубина,
измеренная
эхолотом
H
Э
, м
5 15 25 35 45 55 65 75 85 95 105
5
0,0
0,0
0,1
0,1
0,2
0,2
0,2
0,2
0,3
0,3
0,4
5
10
0,0
0,1
0,2
0,2
0,3
0,4
0,4
0,5
0,6
0,6
0,7
10
20
0,1
0,2
0,3
0,5
0,6
0,7
0,9
1,0
1,1
1,3
1,4
20
30
0,1
0,3
0,5
0,7
0,9
1,1
1,3
1,5
1,7
1,9
2,1
30
40
0,1
0,4
0,7
0,9
1,2
1,5
1,7
2,0
2,3
2,5
2,8
40
50
0,2
0,5
0,8
1,2
1,5
1,8
2,2
2,5
2,8
3,2
3,5
50
60
0,2
0,6
1,0
1,4
1,8
2,2
2,6
3,0
3,4
3,8
4,2
60
70
0,2
0,7
1,2
1,6
2,1
2,6
3,0
3,5
4,0
4,4
4,9
70
80
0,3
0,8
1,3
1,9
2,4
2,9
3,5
4,0
4,5
5,1
5,6
80
90
0,3
0,9
1,5
2,1
2,7
3,3
3,9
4,5
5,1
5,7
6,3
90
100
0
1
2
2
3
4
4
5
6
6
7
100
…
…
…
…
…
…
…
…
…
…
…
…
…
200
1
2
3
5
6
7
9
10
11
13
14
200
…
…
…
…
…
…
…
…
…
…
…
…
…
300
1
3
5
7
9
11
13
15
17
19
21
300
…
…
…
…
…
…
…
…
…
…
…
…
…
400
1
4
7
9
12
15
17
20
23
25
28
400
…
…
…
…
…
…
…
…
…
…
…
…
…
500
2
5
8
12
15
18
22
25
28
32
35
500
600
2
6
10
14
18
22
26
30
34
38
42
600
700
2
7
12
16
21
26
30
35
40
44
49
700
800
3
8
13
19
24
29
35
40
45
51
56
800
900
3
9
15
21
27
33
39
45
51
57
63
900
1000
3
10
17
23
30
37
43
50
57
63
70
1000
…
…
…
…
…
…
…
…
…
…
…
…
…
1800
6
18
30
42
54
66
78
90
102
114
126
1800
2000
7
20
33
47
60
73
87
100
113
127
140
2000
…
…
…
…
…
…
…
…
…
…
…
…
…
3000
10
30
50
70
90
110
130
150
170
190
210
3000
6000
20
60
100
140
180
220
260
300
340
380
420
6000
1. Таблица рассчитана по формуле:
Примечание:
(15.5)
2. и знак поправки одинаков со знаком (C
Ф
− C′).
3. Фактическую скорость звука в воде (С
Ф
) можно определить:
a. по таблицам 34а и 34б «МТ-75»:
C
Ф
= C
0
+ ΔC + ΔC
h
(15.6)
где
C
0
= 1449,14 м/с (для t°C = 0°, S = 35‰ и ρ = 1,033 кг/см
2
– 1 атм.);
ΔC = ΔC
t
+ ΔC
S
+ ΔC
hρt
– сумма поправок за температуру морской воды (ΔC
t
), за ее соленость (ΔC
S
) и
плотность (ΔC
hρt
);
ΔC
h
– поправка за глубину.
c. ΔC – выбирается из таблицы 34а «МТ-75» (с. 299-301) по значению температуры
морской воды (t°C) – слева и ее солености (S‰) – сверху для конкретного диапазона
глубин (0-500 м, 500-1000 м, 1000-2000 м, 2000-3000 м, 3000-4000 м, 4000-5000 м, 5000-
6000 м).
d. ΔC
h
– выбирается из табл. 34б «МТ-75» (с. 301) по значению глубины (h
М
).
e. по таблицам 2.9а и 2.9б «МТ-2000»:
C
Ф
= 1492,9 м/с + ΔC
tS
+ ΔC
H
(15.7)
где
ΔC
tS
– поправка скорости звука за температуру (t°C) и соленость (S‰) морской воды и
выбирается из табл. 2.9а «МТ-2000» (с. 267) по значениям t°C – слева и S‰ –
сверху
(для глубин 0÷8000 м);
ΔC
H
– поправка скорости звука за глубину (давление) выбирается из табл. 2.9б «МТ-
2000» (с. 267) по значению глубины Н м.
Скорость звука в морской воде (из табл. 2.9 «МТ-2000»)
Скорость звука C = 1492,9 + ΔC
tS
+ ΔC
H
, м/с
а) Поправка ΔC
tS
за температуру и соленость на данной глубине (м/с)
Таблица 15.2
t°C
Соленость S, ‰
t°C
10
12
14
16
18
20
22
24
26
28
30
32
0
–78,1
–75,3
–72,5
–69,8
–67,0
–64,3
–61,5
–58,7
–56,0
–53,2
–50,5
–47,7
0
2
–68,6
–65,9
–63,2
–60,5
–57,7
–55,0
–52,3
–49,6
–46,9
–44,1
–41,4
–38,7
2
4
–59,6
–56,9
–54,2
–51,5
–48,8
–46,2
–43,5
–40,8
–38,1
–35,4
–32,8
–30,1
4
6
–50,9
–48,2
–45,6
–42,9
–40,3
–37,7
–35,0
–32,4
–29,7
–27,1
–24,5
–21,8
6
8
–42,5
–39,9
–37,3
–34,7
–32,1
–29,5
–26,9
–24,3
–21,7
–19,1
–16,5
–13,9
8
10
–34,6
–32,0
–29,4
–26,9
–24,3
–21,8
–19,2
–16,6
–14,1
–11,5
–9,0
–6,4
10
12
–27,0
–24,4
–21,9
–19,4
–16,9
–14,4
–11,8
–9,3
–6,8
–4,3
–1,8
+0,8
12
14
–19,7
–17,3
–14,8
–12,3
–9,8
–7,3
–4,9
–2,4
+0,1
+2,6
+5,1
+7,5
14
16
–12,9
–10,4
–8,0
–5,6
–3,1
–0,7
+1,8
+4,2
+6,6
+9,1
+11,5
+14,0
16
18
–6,4
–4,0
–1,6
+0,8
+3,2
+5,6
+8,0
+10,4
+12,8
+15,2
+17,6
+20,0
18
20
–0,3
+2,1
+4,5
+6,8
+9,2
+11,5
+13,9
+16,3
+18,6
+21,0
+23,3
+25,7
20
22
+5,5
+7,8
+10,1
+12,5
+14,8
+17,1
+19,4
+21,7
+24,1
+26,4
+28,7
+31,0
22
24
+10,9
+13,2
+15,4
+17,7
+20,0
+22,3
+24,6
+26,8
+29,1
+31,4
+33,7
+36,0
24
26
+15,9
+18,1
+20,4
+22,6
+24,9
+27,1
+29,3
+31,6
+33,8
+36,1
+38,3
+40,5
26
28
+20,6
+22,8
+25,0
+27,2
+29,4
+31,6
+33,8
+36,0
+38,2
+40,4
+42,6
+44,8
28
30
+24,8
+27,0
+29,2
+31,3
+33,5
+35,6
+37,8
+40,0
+42,1
+44,3
+46,4
+48,6
30
б) Поправка ΔC
H
за глубину (давление)
Глубина Н, (м)
10
20
30
40
50
60
70
80
90
100
110
120
ΔC
H
, (м/с)
0,2
0,3
0,5
0,7
0,8
1,0
1,1
1,3
1,5
1,6
1,8
2,0
Глубина Н, (м)
130
140
150
160
170
180
190
200
300
400
500
600
ΔC
H
, (м/с)
2,1
2,3
2,5
2,6
2,8
3,0
3,1
3,3
4,9
6,6
8,2
9,8
Глубина Н, (м)
700
800
900
1000
2000
3000
4000
5000
6000
7000
8000
ΔC
H
, (м/с)
11,5
13,1
14,8
16,4
32,8
49,2
65,6
82,0
98,4
114,8
131,1
Задача 1:
Определить скорость звука в воде:
1) – на глубине 10 м (t = +18°С и S
= 30‰);
2) – на глубине 1000 м (t = +6°С и S
= 28‰);
3) – на глубине 4000 м (t = +2°С и S = 20‰).