Mikles J., Fikar M. Process Modelling, Identification, and Control
Подождите немного. Документ загружается.


8.8 Observer LQ Control, State-Space and Polynomial Interpretations 381
Based on the results in the state-space domain we will now derive LQ control
in the polynomial domain.
8.8.1 Polynomial LQ Control Design with Observer
for Singlevariable Systems
Consider a linear reachable and observable singlevariable system
˙x(t)=Ax(t)+Bu(t), x(0) = x
0
(8.486)
y(t)=Cx(t) (8.487)
and a cost function
I =
1
2
∞
0
x
T
(t)Qx(t)+u
2
(t)
dt (8.488)
where Q is a real symmetric positive semidefinite matrix. LQ control prob-
lem consists in finding a control law (u = function(x)) such that guarantees
asymptotic stability of the closed-loop system and minimisation of I for any
x
0
.
As it was shown in Section 8.2, the control law is of the form
u = −Kx (8.489)
where
K = B
T
P (8.490)
and P is a symmetric positive semidefinite solution of the matrix Riccati
equation
PA+ A
T
P − PBB
T
P = −Q (8.491)
Deterministic state estimate is given as
˙
ˆx(t)=Aˆx(t)+Bu(t)+L (y(t) − C ˆx) , ˆx(0) = ˆx
0
(8.492)
Matrix L is chosen in such a way that the estimation error
e(t)=x(t) − ˆx(t) (8.493)
with initial condition
e(0) = x
0
− ˆx
0
(8.494)
asymptotically converges to origin.
Control law (8.489) cannot directly be used. It was shown in Section 8.6
that polynomial implementation of the observer gives the control law of the
form
382 8 Optimal Process Control
u =˜u (8.495)
where
˜u = −K ˆx (8.496)
Polynomial solution of the deterministic control design with controller input
being y can be obtained as a combination of polynomial controller and ob-
server.
Theorem 8.5 (LQ control with observer). Consider a reachable and
observable singlevariable system
˙x(t)=Ax(t)+Bu(t), x(0) = x
0
(8.497)
y(t)=Cx(t) (8.498)
where
(sI −A)
−1
B =
B
Rs
(s)
a(s)
(8.499)
C (sI − A)
−1
B =
b(s)
a(s)
(8.500)
and where a(s) is the characteristic polynomial of the matrix A and polyno-
mials a(s), b(s) are coprime.
The control law based on state estimation and minimising the cost function
I is given as
u = −
q(s)
p(s)
y (8.501)
where polynomials p(s), q(s) are a solution of the equation
a(s)p(s)+b(s)q(s)=o(s)f(s) (8.502)
Polynomial p(s) is of degree n if stable polynomial o(s) is of degree n (full
order observer case), or is of degree n −1 is stable polynomial o(s) is of degree
n −1 (reduced order observer case). Polynomial q(s) is of degree n −1. Stable
monic polynomial f(s) is defined as
a(−s)a(s)+B
Rs
(−s)QB
Rs
(s)=f(−s)f(s) (8.503)
Proof. The proof of Theorem 8.3 shows that the characteristic polynomial
f(s) of the closed-loop matrix A −BK and the controller gain K satisfy the
following relation
a(s)+KB
Rs
(s)=f(s) (8.504)
where the stable monic polynomial f(s) is solution of spectral factorisation
equation (8.503). If f (s) exists, it is unique. Matrix K from (8.504) is also
solution of the Riccati equation

8.8 Observer LQ Control, State-Space and Polynomial Interpretations 383
PA+ A
T
P − PBB
T
P = −Q + sP − sP (8.505)
This equation can be manipulated as follows
−sI −A
T
P + P (sI − A)=Q −PBB
T
P (8.506)
B
T
−sI −A
T
−1
−sI −A
T
P (sI − A)
−1
B
+ B
T
−sI −A
T
−1
P (sI − A)(sI −A)
−1
B
= B
T
−sI −A
T
−1
Q −PBB
T
P
(sI −A)
−1
B (8.507)
B
T
P (sI − A)
−1
B + B
T
−sI −A
T
−1
PB
= B
T
−sI −A
T
−1
Q −PBB
T
P
(sI −A)
−1
B (8.508)
As (8.499) holds, equation (8.508) can be written as
B
T
PB
Rs
(s)a(−s)+B
T
Rs
(−s)PBa(s)=B
T
Rs
(−s)
Q −PBB
T
P
B
Rs
(8.509)
KB
Rs
(s)a(−s)+B
T
Rs
(−s) K
T
a(s)
= B
T
Rs
(−s)QB
Rs
(s) − B
T
Rs
(−s) K
T
KB
Rs
(s) (8.510)
a(−s)a(s)+B
T
Rs
(−s)K
T
a(s)+KB
Rs
(s)a(−s)+B
T
Rs
(−s)K
T
KB
Rs
(s)
= a(−s)a(s)+B
T
Rs
(−s)QB
Rs
(s) (8.511)
a(−s)+B
T
Rs
(−s) K
T
(a(s)+KB
Rs
(s))
= a(−s)a(s)+B
T
Rs
(−s)QB
Rs
(s) (8.512)
Considering (8.504) shows that (8.512) is the same as (8.503) which proves
one part of the theorem.
The proof of Theorem 8.3 also gives equation of the asymptotic ob-
server (8.310) where polynomials on this equation are solution of (8.320).
Substituting K ˆx from (8.310) into (8.496) yields
u = −
r(s)
o(s)
u −
q(s)
o(s)
y (8.513)
If
p(s)=o(s)+r(s) (8.514)
then (8.513) is of the form (8.501). As (8.302), (8.317), (8.514) hold, equa-
tion (8.310) can be transformed into (8.502). This concludes the proof.
384 8 Optimal Process Control
Example 8.10:
Consider a controlled process with transfer function of the form
G(s)=
b
0
s + a
0
The objective is to find for this system the transfer function of the feedback
LQ controller with state observer. It is required that the controller contains
an integration term. Therefore, we consider in the cost function (8.488)
derivative ˙u(t)inplaceofu(t) and the weighting matrix Q is reduced to
Q = Q
1
.
From Theorem 8.5 follows that the controller transfer function is in our
case given as
R(s)=
q
1
+ q
0
s(p
1
s + p
0
)
where
p
0
= o
0
+ f
1
− a
0
p
1
p
1
=1
q
0
=
o
0
f
0
b
0
q
1
=
o
0
f
1
+ f
0
− a
0
p
0
b
0
are solutions of the Diophantine equation
(s + a
0
)s(p
1
s + p
0
)+b
0
(q
1
s + q
0
)=o(s)f(s)
and
o(s)=s + o
0
is a stable monic polynomial. Coefficients of the stable monic polynomial
f(s)=s
2
+ f
1
s + f
0
follow from the spectral factorisation equation
(−s + a
0
)(−s)(s + a
0
)s +
b
0
−b
0
s
Q
1
0
00
b
0
b
0
s
= f(−s)f (s)
and are given as
f
0
= b
0
Q
1
,f
1
=
/
a
2
0
+2f
0
The observer polynomial o(s) can be suitably chosen according to further
requirements on control performance.

8.8 Observer LQ Control, State-Space and Polynomial Interpretations 385
8.8.2 Polynomial LQ Design with State Estimation
for Multivariable Systems
Consider a controllable and observable multivariable system
˙x(t)=Ax(t)+Bu(t), x(0) = x
0
(8.515)
y(t)=Cx(t) (8.516)
and a cost function
I =
1
2
∞
0
(x
T
(t)Qx(t)+u
T
(t)u(t))dt (8.517)
LQ control law is implemented as
u(t)=−K ˆx(t) (8.518)
where
K = B
T
P (8.519)
and P is a symmetric positive semidefinite solution of the algebraic Riccati
equation
PA+ A
T
P − PBB
T
P = −Q (8.520)
Deterministic state estimate is given as
˙x(t)=Aˆx(t)+Bu(t)+L(y(t) −C ˆx(t)) , ˆx(0) = x
0
(8.521)
As (8.398) holds then
K = X
−1
L
Y
L
(8.522)
where X
L
, Y
L
are a solution of the Diophantine equation
X
L
A
R
(s)+Y
L
B
Rs
(s)=F
R
(s) (8.523)
This was derived in polynomial design of pole placement controllers for multi-
variable systems. LQ control can be interpreted as the pole placement design.
This implies that we need to determine a matrix F
R
(s) such that LQ cost
function is minimised. To find such a matrix, we will transform the Riccati
equation as follows.
Adding sP to either side of equation (8.520) gives
−sI −A
T
P + P (sI − A)=Q −PBB
T
P (8.524)
Multiplying from the left by B
T
(−sI −A
T
)
−1
, from the right by (sI −A)
−1
B
and using (8.522), (8.398) gives

386 8 Optimal Process Control
B
T
Rs
(−s)K
T
A
R
(s)+A
T
R
(−s)KB
Rs
(s)+B
T
Rs
(−s)K
T
KB
Rs
(s)
= B
T
Rs
(−s)QB
Rs
(s) (8.525)
Adding A
T
R
(−s)A
R
(s) to either side of equation yields
(A
T
R
(−s)+B
T
Rs
(−s)K
T
)(A
R
(s)+KB
Rs
(s))
= A
T
R
(−s)A
R
(s)+B
T
Rs
(−s)QB
Rs
(s) (8.526)
From (8.405) follows that LQ design F
R
(s) needed for determination of K
from (8.523) is a solution of the spectral factorisation equation
F
T
R
(−s)F
R
(s)=A
T
R
(−s)A
R
(s)+B
T
Rs
(−s)QB
Rs
(s) (8.527)
All subsequent steps of the multivariable LQ control design are the same as
in the pole placement design. Thus, L is determined from (8.411) and the
controller transfer function matrix from (8.413).
Example 8.11: Multivariable LQ control
www
Consider a continuous-time multivariable controlled system with the
transfer function matrix
G(s)=A
−1
L
(s)B
L
(s)
where
A
L
(s)=
1+0.3s 0.5s
0.1s 1+0.7s
, B
L
(s)=
0.20.4
0.60.8
The task is to design LQ controller with observer. It is required that the
controller contains an integration term.
The problem can be solved using the relations given above and it is shown
in Program 8.3. We use the Polynomial toolbox for MATLAB.
Program 8.3 (LQ controller design – optlq22.m)
%PLANT
al = [1+.3*s, .5*s; .1*s 1+0.7*s];
bl = [.2 .4;.6 .8];
bl = pol(bl);
[a,b,c,d] = lmf2ss(bl,al);
G = ss(a,b,c,d);
%CONTROLLER
als = al*s;
[As,Bs,Cs,Ds] = lmf2ss(bl,als);
[Brs,Ar] = ss2rmf(As,Bs,eye(4));
Q =10*eye(4);
Fr = spf(Ar’*Ar+Brs’*Q*Brs);
8.8 Observer LQ Control, State-Space and Polynomial Interpretations 387
[Xl,Yl] = xaybc(Ar,Brs,Fr);
K=mldivide(Xl,Yl);
K=lcoef(K);
[Bls,Al] = ss2lmf(As,eye(4),Cs);
%V=10*eye(4);
%Ol = spf(Al*Al’+Bls*V*Bls’);
Ol =[-3.1-3.4*s-0.18*s^2 -0.5-0.58*s-0.011*s^2;
-0.5-0.62*s-0.055*s^2 3.1+4*s+0.9*s^2];
[Xr,Yr] = axbyc(Al,Bls,Ol);
L=mrdivide(Yr,Xr);
L=lcoef(L);
acp = As-L*Cs-Bs*K;
bcp = L;
ccp = K;
dcp = zeros(2);
[brp,arp]=ss2rmf(acp,bcp,ccp,dcp);
[ac,bc,cc,dc] = rmf2ss(brp,arp*s)
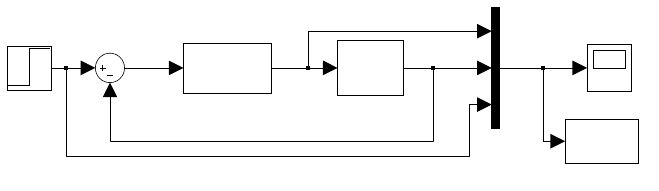
The closed-loop system is implemented in Simulink scheme optlq22s.mdl
shown in Fig. 8.31.
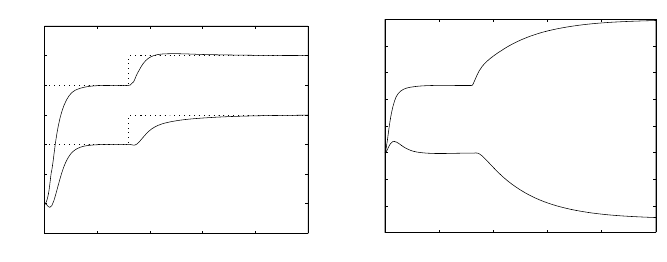
Fig. 8.32a,b shows trajectories of input and output variables of the con-
trolled process.
To Workspace
data
Step
Scope
Process
G
Controller
x’ = Ax+Bu
y = Cx+Du
w
w yu
Fig. 8.31. Scheme optlq22s.mdl in Simulink for multivariable continuous-time LQ
control
Note 8.6. Program 8.3 describes MIMO LQ control design. However, it is writ-
tentobeusedinPA,LQG,orH
2
control.
If pole assignment is desired, we comment the line in the program that
computes spectral factorisation of the matrix F
R
Fr = spf(Ar’*Ar+Brs’*Q*Brs)
388 8 Optimal Process Control
0 5 10 15 20 25
−0.5
0
0.5
1
1.5
2
2.5
3
(a)
t
y,w
0 5 10 15 20 25
−3
−2
−1
0
1
2
3
4
5
(b)
t
u
Fig. 8.32. Trajectories of (a) output, and setpoint variables, (b) input variables of
the multivariable continuous-time process controlled with LQ controller
and substitute it with a corresponding matrix of appropriate dimensions that
places the feedback poles.
To calculate LQG controller (see Section 8.9.2), we uncomment lines with
the second spectral factorisation equation
V=10*eye(4)
Ol = spf(Al*Al’+Bls*V*Bls’)
H
2
controller can be implemented similarly if differences between right
hand sides of Riccati equations (8.539), (8.576), (8.607), and (8.609) are taken
into account.
8.9 LQG Control, State-Space and Polynomial
Interpretation
Based on the state LQG control with the Kalman filter we will derive expres-
sions for polynomial LQG systems for both singlevariable and multivariable
systems.
8.9.1 Singlevariable Polynomial LQG Control Design
Consider a linear singlevariable controllable and observable system
˙x(t)=Ax(t)+Bu(t)+ξ
x
(t) (8.528)
y(t)=Cx(t)+ξ(t) (8.529)
where ξ
x
(t) is a random vector process with normal distribution and
E {ξ
x
(t)} = 0 (8.530)
E
ξ
x
(t)ξ
T
x
(τ)
= V δ (t − τ) , V ≥ 0 (8.531)

8.9 LQG Control, State-Space and Polynomial Interpretation 389
ξ(t) a random vector process with normal distribution and with
E {ξ(t)} = 0 (8.532)
E {ξ(t)ξ (τ )} = δ (t − τ) , (8.533)
We assume thatξ
x
(t)andξ(t) are uncorrelated in time.
Linear Quadratic Gaussian (LQG) problem consists in finding a control
law (u = function(x)) such that asymptotic stability of the closed-loop system
is guaranteed and the cost function I is minimised where
I = E
⎧
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎩
lim
t
0
→−∞
t
f
→∞
1
t
f
− t
0
t
f
t
0
x
T
(t)Qx(t)+u
2
(t)
dt
⎫
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎭
(8.534)
and Q is a real symmetric positive semidefinite matrix.
The separation theorem says that it is possible to solve LQG problem by
solving the deterministic LQ problem at first
˙x(t)=Ax(t)+Bu(t) (8.535)
with the cost function
I =
1
2
∞
0
x
T
(t)Qx(t)+u
2
(t)
dt (8.536)
This results in a control law of the form
u(t)=−Kx(t) (8.537)
where
K = B
T
P (8.538)
and P is a symmetric positive semidefinite solution (P
T
= P ≥ 0)ofthe
algebraic Riccati equation
PA+ A
T
P − PBB
T
P = −Q (8.539)
In the second step, the state ˆx of the system (8.528), (8.529) is estimated
using the Kalman filter
˙
ˆx(t)=Aˆx(t)+Bu(t)+L (y(t) − C ˆx(t)) (8.540)
where
L = NC
T
(8.541)
and N is a symmetric positive semidefinite solution (N
T
= N ≥ 0)ofthe
algebraic Riccati equation
390 8 Optimal Process Control
AN + NA
T
− NC
T
CN = −V (8.542)
Finally, the control law is implemented as
u(t)=−K ˆx(t) (8.543)
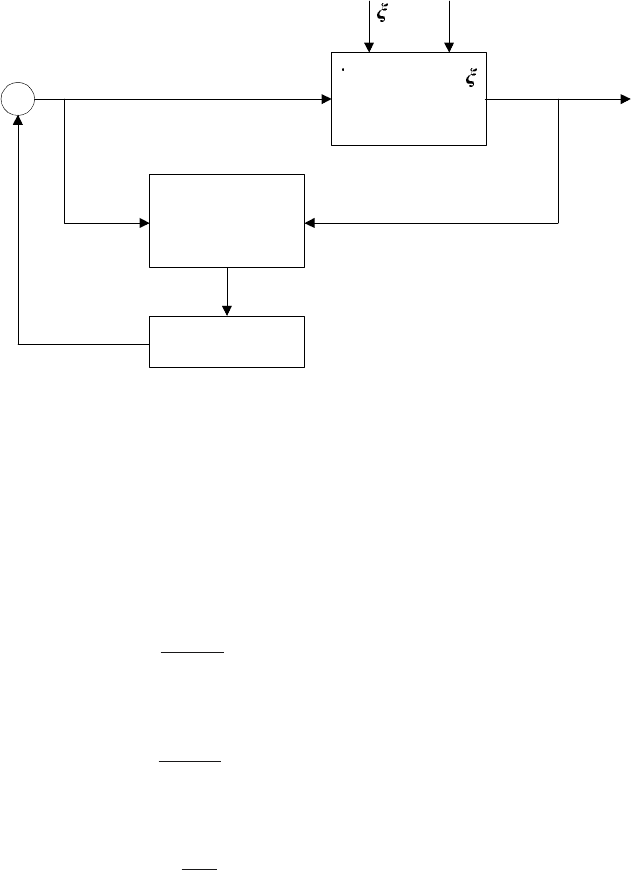
The LQG control is illustrated in Fig. 8.33.
-
u
y
x
ˆ
K
ξ
+=
++=
Cxy
BuAxx
x
Kalman filter
x
ξ
Fig. 8.33. Block diagram of LQG control
Theorem 8.7 (LQG control). Consider a controllable and observable sin-
glevariable system
˙x(t)=Ax(t)+Bu(t)+ξ
x
(t) (8.544)
y(t)=Cx(t)+ξ(t) (8.545)
where
(sI −A)
−1
B =
B
Rs
(s)
a(s)
(8.546)
a(s), B
Rs
(s) are right coprime for a reachable system,
C (sI − A)
−1
=
B
Ls
(s)
a(s)
(8.547)
a(s), B
Ls
(s) are left coprime for an observable system,
C (sI − A)
−1
B =
b(s)
a(s)
(8.548)