Mikles J., Fikar M. Process Modelling, Identification, and Control
Подождите немного. Документ загружается.

412 9 Predictive Control
Q
c
AΔ + P
c
Bz
−1
=
CAΔ + z
−1
AΔ
*
N
2
j=N
1
k
j
Γ
j
+ Bz
−1
*
N
2
j=N
1
k
j
F
j
*
N
2
j=N
1
k
j
(9.50)
=
CAΔ + z
−1
*
N
2
j=N
1
k
j
(AΔΓ
j
+ BF
j
)
*
N
2
j=N
1
k
j
(9.51)
= C
AΔ +
*
N
2
j=N
1
k
j
z
j−1
(B − AΔG
j
)
*
N
2
j=N
1
k
j
(9.52)
= CM (9.53)
We can see that the characteristic polynomial is composed of two polynomials.
The first determines the behaviour of the closed-loop system with respect to
disturbances and corresponds to the observer poles. The second polynomial
depends in a rather complicated way on the controlled process and the GPC
parameters. It determines the closed-loop stability as it can also be seen from
the output equation
y(z)=
Bz
−1
M
w(z)+
R
c
M
ξ(z) (9.54)
where the polynomial C has been cancelled in both transfer functions.
9.3.4 Derivation of the Predictor from State-Space Models
To show that it is possible to use any linear model, we will derive here the
predictor equations based in the state-space model.
Let us consider the standard state-space model of the form (9.4), (9.5).
Like in the previous case when CARIMA model was used, it is necessary to
include an integrator to the process. This can be accomplished by changing
the input to the process from u(k) to its increment Δu(k)
u(k)=Δu(k)+u(k − 1) (9.55)
There are more possibilities how to incorporate an integrator in the process
model. Among them, one way is to define a new state vector
¯x(k)=
x(k)
u(k − 1)
(9.56)
From the state-space model (9.4), (9.5) then follows
¯x(t +1)=
AB
0 I
¯x(k)+
B
I
Δu(k)=
¯
A¯x(k)+
¯
BΔu(k) (9.57)
y(k)=
C 0
¯x(k)=
¯
C ¯x(k) (9.58)
We can see that formally both state-space models are equivalent.

9.3 Derivation and Implementation of Predictive Control 413
The derivation of the predictor is simpler than in the input-output case.
The predictor vector is given as
ˆ
y(t +1)=
¯
C ¯x(t +1)=
¯
C
¯
A¯x(k)+
¯
BΔu(k)
(9.59)
ˆ
y(t +2)=
¯
C ¯x(t +2)=
¯
C
¯
A¯x(t +1)+
¯
BΔu(t +1)
(9.60)
.
.
.
ˆ
y(t + N
2
)=
¯
C ¯x(t + N
2
)=
¯
C
¯
A¯x(t + N
2
− 1) +
¯
BΔu(t + N
2
− 1)
(9.61)
where the state predictions are of the form
¯x(t +1)=
¯
A¯x(k)+
¯
BΔu(k) (9.62)
¯x(t +2)=
¯
A¯x(t +1)+
¯
BΔu(t +1)
=
¯
A
2
¯x(k)+
¯
A
¯
BΔu(k)+
¯
BΔu(t + 1) (9.63)
.
.
.
¯x(t + N
2
)=
¯
A
N
2
¯x(k)+
¯
A
N
2
−1
¯
BΔu(k)+···+
¯
BΔu(t + N
2
− 1) (9.64)
Joining all predictions to form the vector equation (9.34) yields matrices and
vectors
G =
⎛
⎜
⎜
⎜
⎜
⎜
⎜
⎝
¯
C
¯
B 0 ... ... 0
¯
C
¯
A
¯
B
¯
C
¯
B 0 ... 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
¯
C
¯
B 0
¯
C
¯
A
N
2
−1
¯
B ... ...
¯
C
¯
B
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎠
(9.65)
and
y
0
=
⎛
⎜
⎜
⎜
⎝
¯
C
¯
A
¯
C
¯
A
2
.
.
.
¯
C
¯
A
N
2
⎞
⎟
⎟
⎟
⎠
¯x(k) (9.66)
Example 9.1:
To explain the principle let us consider a simple SISO process with the
numerator and denominator polynomials of the form
B(z
−1
)=0.4+0.1z
−1
,A(z
−1
)=1− 0.5z
−1
This corresponds to the process transfer functions of the form
0.4z
−1
+0.1z
−2
1 −0.5z
−1
Let us assume that C(z
−1
) = 1. The CARIMA description of the system
is of the form

414 9 Predictive Control
ΔA(q
−1
)y(k)=B(q
−1
)Δu(k − 1) + ξ(k)
or
y(k)=1.5y(k −1) −0.5y(k −2) + 0.4Δu(k −1) + 0.1Δu(k −2) + ξ(k)
Let us now assume the cost function (9.8) with the parameters N
1
=1,
N
2
=3,N
u
=2.
The predictions of future outputs can be obtained if ξ(t + i) = 0 and are
as follows:
ˆy(t +1)=1.5y(k) −0.5y(k − 1) + 0.4Δu(k)+0.1Δu(k − 1)
ˆy(t +2)=1.5y(t +1)− 0.5y(k)+0.4Δu(t +1)+0.1Δu(k)
ˆy(t +3)=1.5y(t +2)− 0.5y(t +1)+0.4Δu(t +2)+0.1Δu
(t +1)
According to the assumptions, the term Δu(t + 2) is equal to zero. The
higher output predictions contain the lower output predictions that can
be back substituted and yield
ˆy(t +1)=1.5y(k) −0.5y(k − 1) + 0.4Δu(k)+0.1Δu(k − 1)
ˆy(t +2)=1.75y(k) −0.75y(k − 1)
+0.4Δu(t +1)+0.7Δu(k)+0.15Δu(k − 1)
ˆy(t +3)=1.875y(k) −0.875y(k
− 1)
+0.7Δu(t +1)+0.85Δu(k)+0.175Δu(k − 1)
Stacking all predictions into a vector and separating the terms unknown
at time k from the known ones gives
⎛
⎝
ˆy(t +1)
ˆy(t +2)
ˆy(t +3)
⎞
⎠
=
⎛
⎝
0.40
0.70.4
0.85 0.7
⎞
⎠
Δu(k)
Δu(t +1)
+
⎛
⎝
1.5y(k) − 0.5y(k − 1) + 0.1Δu(k − 1)
1.75y(k) − 0.75y(k − 1) + 0.15Δu(k − 1)
1.875y(k) − 0.875y(k − 1) + 0.175Δu(k − 1)
⎞
⎠
An alternative to obtain the matrix G would be to perform the long
division
B
ΔA
=
0.4+0.1z
−1
1 −1.5z
−1
+0.5z
−2
=0.4+0.7z
−1
+0.85z
−2
+ ···
Now let us assume that the weighting coefficient λ is equal to zero. Inver-
sion of the Hessian matrix gives
H
−1
=
5.1383 −6.9170
−6.9170 10.8498
Finally, multiplication with g yields the closed-loop expression for the
element
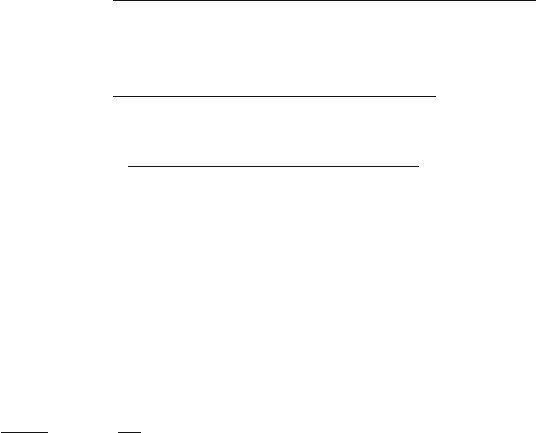
Δu(k)=−3.6461y(k)+1.2351y(k − 1) −0.2470Δu(k − 1)
+2.0553w(t +1)+0.8300w(t +2)− 0.4743w(t +3)
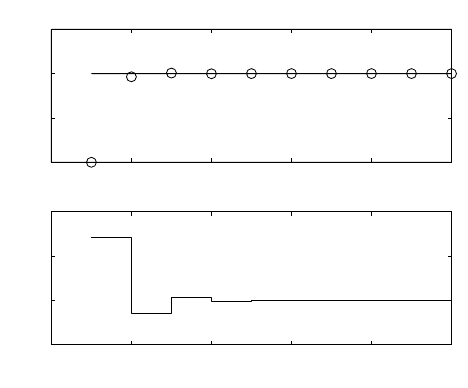
9.3 Derivation and Implementation of Predictive Control 415
0 2 4 6 8 10
0
0.5
1
1.5
Output
y,w
0 2 4 6 8 10
0
1
2
3
Control
sam
p
le
u
Fig. 9.2. Closed-loop response of the controlled system
Simulation results show the behaviour of the closed-loop system in the
Fig. 9.2.
Let us also derive the predictor equations in the state-space form. The
corresponding state-space model can for example be given as
x(t +1)=
01
00.5
x(k)+
0
1
u(k)
y(k)=
0.10.4
x(k)
The new state-space description with integrator has three states
¯x(t +1)=
⎛
⎝
010
00.51
001
⎞
⎠
¯x(k)+
⎛
⎝
0
1
1
⎞
⎠
Δu(k)=
¯
A¯x(k)+
¯
BΔu(k)
y(k)=
0.10.40
¯x(k
)=
¯
C ¯x(k)
The state predictions of three steps to the future are then given as
¯x(t +1)=
¯
A¯x(k)+
¯
BΔu(k)
¯x(t +2)=
¯
A¯x(t +1)+
¯
BΔu(t +1)
=
¯
A
2
¯x(k)+
¯
A
¯
BΔu(k)+
¯
BΔu(t +1)
¯x(t +3)=
¯
A¯x(t +2)
=
¯
A
3
¯x(k)+
¯
A
2
¯
BΔu(k)+
¯
A
¯
BΔu(t +1)
The output predictions are then given as
ˆy(t +1)=
¯
C
¯
A¯x(k)+
¯
C
¯
BΔu(k)
ˆy(t +2)=
¯
C
¯
A
2
¯x(k)+
¯
C
¯
A
¯
BΔu(k)+
¯
C
¯
BΔu(t +1)
ˆy(t +3)=
¯
C
¯
A
3
¯x(k)+
¯
C
¯
A
2
¯
BΔu(k)+
¯
C
¯
A
¯
BΔu(t +1)
or in the vector form
416 9 Predictive Control
⎛
⎝
ˆy(t +1)
ˆy(t +2)
ˆy(t +3)
⎞
⎠
=
⎛
⎝
¯
C
¯
B 0
¯
C
¯
A
¯
B
¯
C
¯
B
¯
C
¯
A
2
¯
B
¯
C
¯
A
¯
B
⎞
⎠
Δu(k)
Δu(t +1)
+
⎛
⎝
¯
C
¯
A
¯
C
¯
A
2
¯
C
¯
A
3
⎞
⎠
¯x(k)
When the actual values are substituted for the system matrices and states,
it yields
⎛
⎝
ˆy(t +1)
ˆy(t +2)
ˆy(t +3)
⎞
⎠
=
⎛
⎝
0.40
0.70.4
0.85 0.7
⎞
⎠
Δu(k)
Δu(t +1)
+
⎛
⎝
0.3x
2
(k)+0.4u(k − 1)
0.15x
2
(k)+0.7u(k − 1)
0.075x
2
(k)+0.85u(k − 1)
⎞
⎠
We can note that the matrix G is the same in both cases. The second part
depends on the actual state definitions. However, the predictive controller
will be the same.
9.3.5 Multivariable Input-Output Case
In the same line of thought as in the SISO case, the multivariable GPC algo-
rithm can de derived via Diophantine equations. From the practical point of
view, the multivariable controller can come from the prediction equation (9.22)
that holds exactly as before, only the vector and matrix elements instead of
being scalar are vectors and matrices. If m-input and n-output system is con-
sidered, then the matrix G is of the form
G =
⎛
⎜
⎜
⎜
⎜
⎜
⎜
⎝
G
0
0 ... ... 0
G
1
G
0
0 ... 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. G
0
0
G
N
2
−1
... ... G
0
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎠
(9.67)
with G
i
being matrices of dimensions [n×m] and the overall G has dimensions
[n(N
2
− N
1
+1)× mN
u
].
The vectors y
0i
and matrices G
i
can be obtained analogously as in the
singlevariable case from free and step responses of the system.
The drawbacks of the proposed multivariable derivation are increased di-
mensions of the matrices involved in matrix inversion routines. The multivari-
able formulation can be broken into series of SISO GPC calculations if the
system denominator matrix A(z
−1
) is diagonal.
9.3.6 Implementation
As it was stated before, for the actual implementation of the linear GPC
algorithm only two process characteristics are needed: step and free responses.
The step response can be obtained directly from the process by performing a

9.3 Derivation and Implementation of Predictive Control 417
small step change in one of the manipulated inputs at a time if the process
was before in a steady state. The magnitude of the step change is important
if the process is non-linear. If the process steady-state gain is approximately
known then the magnitude of the input step change should be chosen such
that it produces step response approaching the desired setpoint value. This
strategy may be applied if a non-linear model is used for predictions.
If the polynomials A, B are estimated on-line by means of a RLS algorithm,
the step response is obtained from the polynomial division
B
AΔ
= g
0
+ g
1
z
−1
+ ···+ g
N
1
z
−N
1
+ ···+ g
N
2
z
−N
2
+ ··· (9.68)
The matrix G can be formed from the coefficients of the step response and it
is given by the last N
2
−N
1
+ 1 rows and the first N
u
columns of the Toeplitz
matrix (9.33).
The free response is calculated as the process response from the actual
initial conditions if the input is fixed to u(k − 1). At time k is should hold
y(k)=y
0
(k) (9.69)
However, the assumption about random-walk disturbance usually results in
non-zero disturbance at time k and holds
y(k)=y
0
(k)+d(k) (9.70)
This disturbance is assumed to be constant in all future predictions. The
disturbance and the free response are thus calculated as
d =
deg(A)
i=0
a
i
y
f
(k − i) −
deg(B)
i=0
b
i
u
f
(k − i − 1) (9.71)
y
0
(t + j)=y
f
(t + j) (9.72)
= d −
deg(A)
i=1
a
i
y
f
(k − i + j)+
deg(B)
i=0
b
i
¯u(k − i + j − 1) (9.73)
where
¯u(k − i + j)=
u
f
(k − 1) j ≥ i
u
f
(k − i + j) inak
(9.74)
and
y
f
=
y
C
,u
f
=
u
C
(9.75)
Note 9.1. If polynomial P is assumed to be non-unity, then the above is valid
if the system denominator A is changed for PA. To ensure the offset-free
setpoint following, the polynomial P should be specified subject to condition
P (1) = 1.
418 9 Predictive Control
Note 9.2. The polynomial C is normally not estimated on-line, but used as a
user-design parameter. It can be shown from relation between state-space and
input-oputput approaches that it acts as an observer polynomial and is used
for disturbance rejection.
9.3.7 Relation to Other Approaches
One of the features of GPC approach is its generality. With different values
of its parameters it can be reduced to some well-known controllers:
Mean level control
N
1
=1,N
2
→∞,N
u
=1,P=1,λ=0
Exact model following
N
1
=1,N
2
= T
d
+1,N
u
= T
d
+1,P=1,λ=0
or
N
1
=1,N
2
>T
d
,N
u
= N
2
− T
d
,P=1,λ=0
Dead-beat control
N
1
≥ deg(B)+1,N
2
≥ N
u
+ N
1
−1,N
u
≥ deg(A)+1,P=1,λ=0
Pole placement Dead-beat + P . Poles are placed at zeros of P .
N
1
≥ deg(B)+1,N
2
≥ N
u
+ N
1
−1,N
u
≥ deg(A)+1,P=1,λ=0
9.3.8 Continuous-Time Approaches
Predictive control has been developed in discrete-time domain. The discrete
formulation allows for an easy prediction generation, because time response
of discrete systems can be obtained from polynomial division of the system
numerator and denominator.
The analogical formulation for continuous-time systems is by no means so
simple. The principial polynomial equations remain the same, however, their
interpretation is different. For the signal predictions, the Taylor expansion is
used. However, the main advantage of MBPC – constraints handling, is very
difficult with this approach.
There are some approaches that are more realistic while still allowing con-
straints. The main principle is to approximate the future control and output
signals as a linear combination of selected continuous-time base functions –
for example splines. The real optimised variables become parameters of the
splines. It can be shown that both input and output signal approximations
9.4 Constrained Control 419
are affine functions of these parameters and thus constrained continuous-time
predictive control can be solved as a Quadratic Programming task.
The advantage of this approach is a truly continuous-control where the
choice of the sampling time is not so crucial as in the discrete time case. For
the disadvantages, we mention a larger number of user parameters and not
very clear stability properties.
9.4 Constrained Control
The GPC algorithm derived in the preceding section did not consider the
presence of constraints. This is not very realistic, as in practice some kind of
constraints is usually present in the process control. Most often, inputs are
constrained to be between some minimal and maximal values (flows cannot
be negative, valves can be opened at 100% maximally) or input rate changes
are limited. Usually, there also exist some recommended values of process
outputs; these are often formulated as soft constraints as opposed to hard
input constraints.
The ability to handle constraints is one of the key properties of MBPC and
also caused its spread, use, and popularity in industry. Nowadays, most of the
industrial processes run at the constraints, if not, the process is unnecessarily
overdesigned.
One might argue that input constraints can be respected if the calculated
control by some control method is subsequently clipped to be within limits.
There are at least two reasons not to do so:
• There is a loss of anticipating action. As the control is on its limit, it
cannot influence the process in a suitable way (one degree of freedom is
lost). The process may go totally unstable, out of limits of safety, or to
an emergency mode. This usually causes heavy economic losses connected
with emergency stop and start-up procedures.
• If multivariable control is considered, certain influence between the input
vector elements has to be respected. Clipping one input element may cause
entirely different transient responses. This phenomenon is called direction-
ality of a multivariable plant.
The cost function used in GPC is quadratic and of the form (9.35). If we
assume only constraints that are linear with respect to the optimised vec-
tor ˜u then the resulting optimisation problem may be cast as the Quadratic
Programming problem which is known to be convex and for which efficient
programming codes exist. The general constrained GPC formulation is thus
given as
min
˜u
2g
T
˜u + ˜u
T
H ˜u subject to: A˜u ≥ b (9.76)
Several types of constraints may be written in this general form:
420 9 Predictive Control
Input rate limits Δu
min
≤ Δu ≤ Δu
max
:
A =
I
−I
, b =
1Δu
min
−1Δu
max
where 1 is a vector whose entries are ones.
Input amplitude limits u
min
≤ u ≤ u
max
:
A =
L
−L
, b =
1u
min
− 1u(t − 1)
−1u
max
+ 1u(t − 1)
where L is a lower triagonal matrix whose entries are ones.
Output constraints y
min
≤ y ≤ y
max
:
A =
G
−G
, b =
y
min
− y
0
−y
max
+ y
0
Several other types of output constraints can be handled similarly: overshoot,
undershoot, monotony, etc.
Although input constraints can always be met, presence of output con-
straints can cause infeasibility of the Quadratic Programming. Therefore from
practical point of view, hard output constraints should be changed to soft con-
straints where amount ε of constraint violation is penalised. In such a case
the output constraints are of the form
−ε + y
min
≤ y ≤ y
max
− ε, ε > 0 (9.77)
and the cost function (9.35) is of the form
I =2g
T
˜u + ˜u
T
H ˜u + ε
T
¯
Hε (9.78)
and the variables ε are added to optimised variables.
9.5 Stability Results
Any predictive method minimising the finite horizon cost function may become
unstable in some cases. This can easily be imagined if the system controlled
contains right half plane zeros, the output horizon is equal to one, and control
penalisation is equal to zero. Inevitably, the predictive controller that min-
imises only the output error, is able to set it to zero at each sampling time.
The price however is, that the control signals are increasing in magnitude and
the system will be unstable.
This is one of the main issues against MBPC. Although the methods may
work well in practice, some systems exists in theory for which the methods
are highly sensitive. Even more significant is, that there is no clear theory
which predicts the closed-loop behaviour for arbitrary horizons and control
penalisations.
9.5 Stability Results 421
Therefore, two main streams toward stability have been developed. In the
first case, some combinations of GPC parameters have been proven to be
stabilising. The second line of research has been devoted to methods that
overcome the basic GPC drawbacks.
9.5.1 Stability Results in GPC
Theorem 9.3. The closed-loop system is stable if the system is stabilisable
and detectable and if:
• N
2
→∞, N
u
= N
2
,andλ>0 or
• N
2
→∞, N
u
→∞, N
u
≤ N
2
− n +1,andλ =0where n is the system
state dimension.
Theorem 9.4. For open-loop stable processes the closed-loop system is stable
and the control tends to a mean level law for N
u
=1and λ =0as N
2
→∞.
Theorem 9.5. The closed-loop system is equivalent to a stable state dead-beat
controller if
1. the system is observable and controllable and
2. N
1
= n, N
2
≥ 2n − 1, N
u
= n,andλ =0where n is the system state
dimension.
9.5.2 Terminal Constraints
The first approach that forces MBPC methods to be stable is based on the
state terminal constraints. Roughly speaking, the system is stable if it is sub-
ject to the moving-terminal constraint on final states
x(k + N
2
)=0 (9.79)
Several different algorithm have emerged that are based on this result.
CRHPC
CRHPC (Constrained Receding Horizon Predictive Control), and SIORHC
(Stable Input Output Receding Horizon Control) were developed indepen-
dently, but are in fact equivalent. The idea behind these techniques is an
equivalent of the state terminal constraint within input/output system de-
scription. Hence, these methods optimise the usual quadratic function over
finite horizons subject to condition that the output exactly matches a ref-
erence value over a future constraint range (after k + N
2
). Some degrees of
freedom force the output to stay at setpoints while the remaining degrees of
freedom are available to minimise the cost function. The output constraint
description is