Назаров Х.Н. Робототехнические системы и комплексы
Подождите немного. Документ загружается.

2
МИНИСТЕРСТВО ВЫСШЕГО И СРЕДНЕГО СПЕЦИАЛЬНОГО
ОБРАЗОВАНИЯ РЕСПУБЛИКИ УЗБЕКИСТАН
ТАШКЕНТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
им. АБУ РАЙХАНА БЕРУНИ
Х. Н. Назаров
РОБОТОТЕХНИЧЕСКИЕ СИСТЕМЫ И
КОМПЛЕКСЫ
Учебное пособие
Ташкент - 2004

3
УДК 681.865.8
Робототехнические системы и комплексы: Учебное пособие / Х.Н. Назаров.;
Ташкентский государственный технический университет, Ташкент. 2004, 101с.
В данном учебном пособии описываются принципы построения
робототехнических систем и комплексов (РСК); рассматриваются роботы и их
применение в робототехнических и гибких производственных системах;
математическое описание роботов; классификация РСК; основные схемы
применения роботов в РСК; вопросы применения РСК в сборочных операциях, в
механической обработке, в кузнечно-прессовых операциях, в сварочных
комплексах и др. мобильные робототехнические системы различного назначения;
а также интеллектуальные РСК.
Учебное пособие предназначено для студентов технических вузов
обучающихся по направлению бакалавриатуры 5521800 – «Автоматизация и
управление» и магистрантов специальностей 5А521814 – «Управление
робототехническими системами и комплексами» и 5А521801 – «Управление в
технических системах».
Илл. 40 Табл.13. Библиогр. 20 назв.
Кафедра «Интеллектуальные и информационные роботы»
Печатается по решению Координационного совета межвузовских научно
-
методических объединений Министерства высшего и среднего специального
образования Республики Узбекистан и научно-методического совета
Ташкентского государственного технического университета имени Абу Райхана
Беруни.
Рецензенты: ведущий научный сотрудник Центра современных информационных
технологий, АН РУз, д.т.н. проф. Исмаилов М. А.; кандидат
технических наук, доцент кафедры «Автоматика и телемеханика»
Шипулин Ю. Г.
(С) Ташкентский государственный технический университет. 2004

4
Введение
Эффективным средством решения многих задач комплексной автоматизации
являются робототехнические комплексы (РТК), работающие по принципу гибкой
«безлюдной» технологии под управлением ЭВМ. Переход от изолированного
использования отдельных роботов, станков с числовым программным управлением
(ЧПУ) и другого автоматизированного оборудования к РТК позволяет резко
сократить время переналадки производства на выпуск новой продукции,
высвободить обслуживающий персонал и обеспечить круглосуточную
эксплуатацию оборудования.
Главное отличие РТК от автоматических линий, традиционно используемых в
массовом производстве, заключается в их гибкости, т. е. в способности быстро
перестраиваться на выполнение новых технологических операций или изменение их
последовательности за счет изменения управляющих программ. Поэтому РТК и
создаваемые на их основе гибкие автоматизированные производственные системы
находят все более широкое применение в серийном производстве, доля которого в
промышленности составляет 80 %.
В настоящее время для гибкой автоматизации производства в основном
используются РТК первого поколения с программным управлением от ЭВМ.
Автоматизация технологических операций в них обеспечивается системами ЧПУ
роботов и оборудования. Однако возможности систем ЧПУ принципиально
ограничены. Они могут обеспечить автоматическое функционирование РТК только
в строго определенных и неизменных условиях, организация которых требует
значительных затрат.
Существенное расширение функциональных возможностей РТК достигается
за счет введения в его систему управления элементов адаптации и искусственного
интеллекта. Такие РТК с адаптивным управлением могут автоматически
приспосабливаться к непредсказуемым изменениям производственной обстановки и
условий эксплуатации. Они принципиально отличаются от РТК первого поколения
мощным информационным и программным обеспечением, позволяющим системе
управления планировать технологические операции и принимать оптимальные
решения, воспринимать и оперативно реагировать на изменения в рабочей зоне,
анализировать обстановку и распознавать объекты, программировать работу
оборудования и корректировать управляющие программы, диагностировать
неисправности и предотвращать аварийные ситуации.
Адаптивные РТК автоматизируют широкий класс технологических операций,
связанных не только с физическим, но и с умственным трудом. Необходимость в
адаптации возникает при механической обработке, сварке, окраске, сборке, контроле
и многих других операциях. В связи с этим адаптивные РТК второго поколения
являются эффективным средством комплексной автоматизации. Они особенно
перспективны в условиях многономенклатурного серийного, мелкосерийного и даже
единичного производства.
На пути создания и совершенствования адаптивных РТК возникает много
научно-технических проблем, связанных с разработкой теоретических основ
адаптивного управления и искусственного интеллекта, созданием широкой

5
номенклатуры датчиков внешней и внутренней информации и микропроцессорных
систем для обработки этой информации и аппаратно-программной реализации
адаптивного управления.
В настоящем учебном пособии в главе 1 рассматривается концепция и общие
принципы построения роботов и их применение в робототехнических и гибких
производственных системах. Глава 2 посвящена математическому описанию
роботов. В главе 3 описаны робототехнические системы и комплексы, их
классификация; основные схемы применения роботов в комплексах. Главы 4-8
посвящены робототехническим комплексам сборочных операций, механической
обработки, кузнечно-прессовых и сварочных операций. В главе 9 описаны
мобильные робототехнические системы. В главе 10 рассматриваются
интеллектуальные робототехнические системы.
6
Глава 1. Роботы и их применение в робототехнических и
гибких производственных системах
1.1. Основные термины и определения, требования к робототехническим
системам и комплексам
Робототехнической системой называется техническая система, в которой
преобразования и связи с энергии, массы и информации отражены с использованием
промышленных роботов. В зависимости от функции и выполняемых операций ПР
различают роботизированный технологический комплекс (РТК) и
роботизированный производственный комплекс (РПК).
РТК называется автономно действующая совокупность средств производства,
включающая единицу или группу технологического оборудования,
взаимодействующая с одним промышленным роботом, и набор вспомогательного
оборудования, обеспечивающий полностью автоматический цикл работы внутри
комплекса и связь его с входными и выходными потоками остального производства.
РПК называется автономно действующая совокупность технологических
средств производства, включающая один промышленный
робот ( выполняемый
основные операции технологического процесса - сборку, сварку, окраску) и набор
вспомогательного оборудования, обеспечивающая полностью автоматизированный
цикл выполняется технологических операций внутри комплекса.
Исполнительные устройства ПР – устройства, выполняющие его
двигательные функции. В их состав входят манипулятор (М) и устройство
передвижения (УП).
Рабочий орган манипулятора ПР – устройство, осуществляющее
непосредственное взаимодействие робота с
внешней средой. Обычно представляет
собой захватное устройство или рабочий инструмент.
Управляющее устройство (УУ) ПР предназначено для формирования и
выдачи управляемых воздействий исполнительному устройству в соответствии с
заданной программой.
Измерительное устройство ПР осуществляет сбор информации для
управляющего устройства о состоянии ПР и внешней среды. Входит в состав УУ.
Обслуживающий ПР
– робот, выполняющий вспомогательные переходы и
транспортные операции, например, загрузочно-разгрузочные и транспортные
роботы.
Операционный ПР – робот, выполняющий технические операции и их
элементы, например, сварку, сборку, нанесение покрытий.
Роботизация производства – создание новых технологий, нового
оборудования, разработка принципов управления и организации производства, в
котором широко используются роботы.
Программное управление ПР – автоматическое
управление исполнительным
устройством ПР и, функционирующим совместно с ним, технологическим
оборудованием.
7
Рабочее пространство в котором может находится рабочий орган
манипулятора ПР при его функционировании.
Геометрическая характеристика рабочей зоны робота -линейный или углевой
размер, площадь сечения или объем рабочей зоны робота, или их совокупность.
Базовая система координат ПР – система координат, относительно которой
задаются геометрические характеристики рабочей зоны робота.
Число степеней подвижности
ПР определяется числом степеней свободы
кинематической цепи манипулятора ПР относительно базовой системы координат, а
также числом степеней свободы устройства передвижения робота.
Номинальная грузоподъемность ПР характеризуется наибольшим значением
массы предмета производства или рабочего инструмента, при котором
гарантируется их захватывание и удержание.
Погрешность позиционирования рабочего органа – отклонение позиции
рабочего органа от
положения, заданного программой управления.
Позиционное управление ПР – вид программного управления, при котором
движение исполнительного устройства робота программируется по упорядоченной
во времени конечной последовательности точек рабочего пространства без контроля
движения между ними.
Цикловое управление ПР – подкласс позиционного управления роботом, при
котором последовательность точек программируется с помощью устройств
релейного действия.
Контурное
управление ПР – разновидность программного управления, при
котором движение исполнительного устройства робота программируется в виде
траектории в рабочем пространстве с непрерывным контролем по скорости.
Адаптивное управление ПР – вид управления, при котором непосредственно
в процессе управления изменяется алгоритм управления в функции от состояния
внешней среды и самого робота.
Групповое управление ПР – процесс
управления несколькими ПР,
объединенными общей системой управления ( на базе ЭВМ).
Программирование ПР – процесс составления, занесения в УУ и отладки
программы управления ПР.
Обучение ПР – процесс программирования при помощи предварительного
управления движением его исполнительного устройства человеком – оператором, с
занесением в управляющее устройство параметров этого движения, определяющих
программу управления.
К робототехническим
системам и комплексам (РСК) предъявляются
следующие требования:
Планировка РСК должна обеспечивать свободный, удобный и безопасный
доступ обслуживающего персонала к основному и вспомогательному оборудованию
и органам управления РСК.
Планировка должна исключать пересечение трасс следования ПР и оператора
в процессе работы ПР по программе. РСК должен быть обеспечен средствами
защиты от возможного
проникновения человека в зону действия ПР (светозащита,
ограждения и др.).
8
Размещение средств защиты РСК не должно : ограничивать технических
возможностей основного оборудования и ПР; ухудшать удобство их обслуживания.
Размещение средств управления РСК должно обеспечивать свободный и
быстрый доступ к органам аварийного отключения ПР и безопасность оператора
при управлении ПР в наладочном режиме.
Планировка РСК должна обеспечивать беспрепятственное перемещение
оператора вне
рабочего пространства ПР в течение работы ПР по программе.
1.2. Интеллектуальные роботы
Интеллектуальный робот – гибко перестраиваемое автоматическое
устройство, способное производить некоторые интеллектуальные и заранее не
запланированные двигательные функции человека. Свойства “интеллектуальности”,
проявляемые в способности воспроизводить заранее незапланированные
двигательные функции, отличают данное поколение роботов от 1-го и 2-го
поколений. Интеллектуальность, как способность человека решать задачи с
неизвестными априори схемами решения, позволяет ему целенаправленно
взаимодействовать с заранее неопределенной внешней средой, приспосабливаясь к
некоторым ее изменениям. Такая способность должна быть присуща и
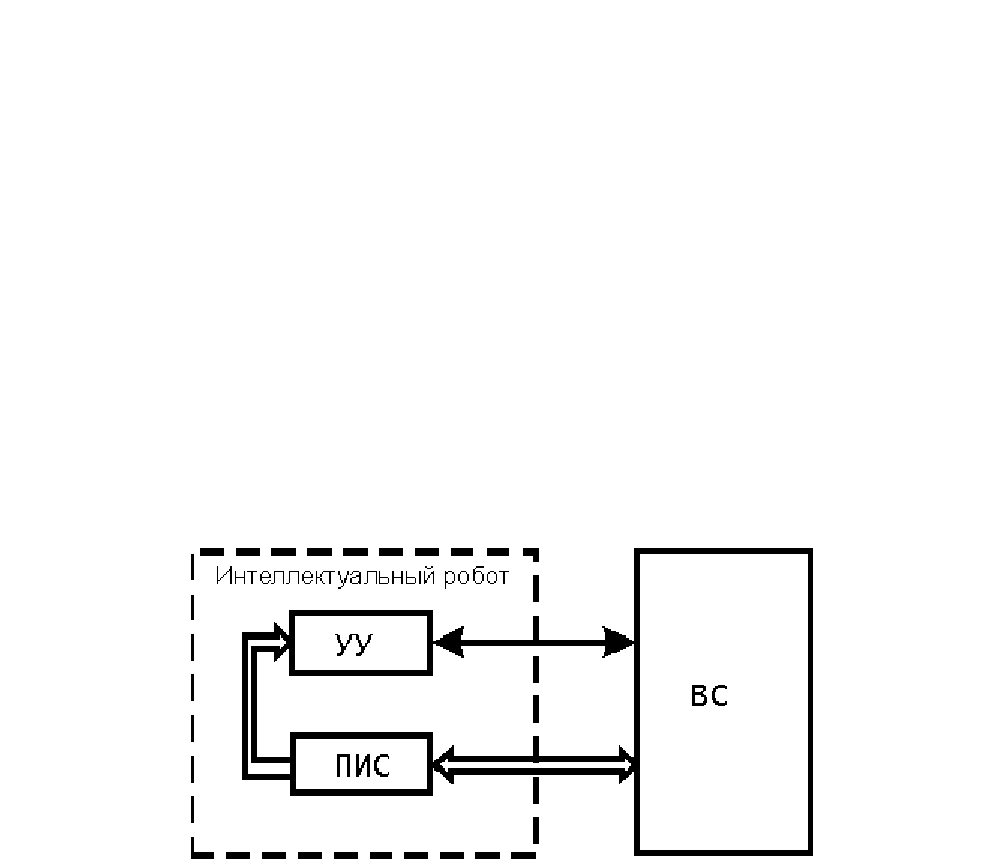
интеллектуальным роботам. Интеллектуальный робот (ИР) состоит из питательно-
исполнительной системы и устройства управления, осуществляющих активное
целенаправленное информационное и материально-энергетическое взаимодействие
между собой и не всегда определенной заранее внешней средой (рис. 1.1).
Рис.1.1. Общая схема интеллектуального робота: ПИС - питающая и
исполнительная система, УУ - устройство управления, ВС - внешняя среда, в том
числе оператор, роботы, оборудование; ↔ - информационные взаимодействия, ⇒,
⇔ - материально-энергетические взаимодействия и связи.
На сегодняшний день теория ИР находится на начальной стадии своего
развития, поэтому достаточно детально раскрыть внутреннюю структуру составных
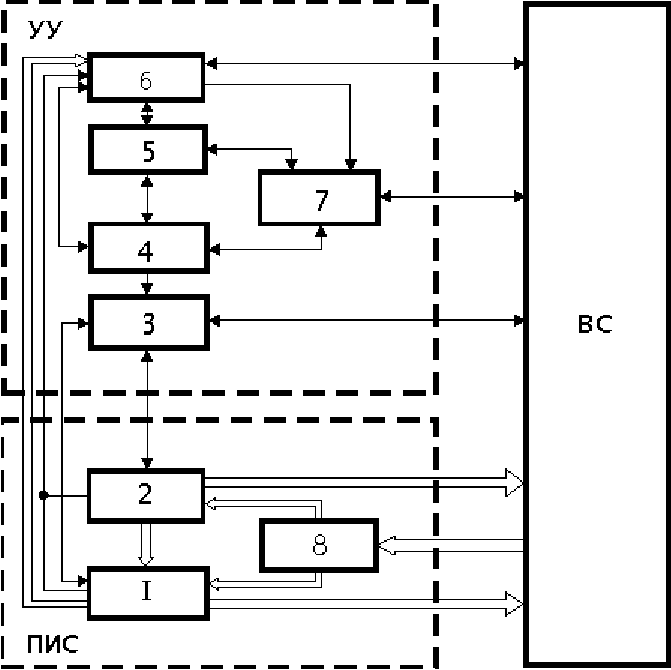
частей самого совершенного ИР не представляется возможным. Представленная на
рис. 1.2 схема ИР отражает лишь те составные элементы и связи, которые
существуют в лабораториях и опытных образцах подвижных интеллектуальных
роботов. ПИС состоит из питательной и исполнительной системы. Блок питания
9
служит для покрытия потребностей соответствующих узлов робота в материалах
(например потребности самого блока питания в топливе, которое может быть
жидким, твердым, газообразным ) и в энергии на периодическое материально-
энергетическое взаимодействие с внешней средой и преобразование полученных
материалов ресурсов в энергию . Обычно в схемах ИР, приводимых в литературе
данный блок опускается ,
считают его наличие само собой разумеющимся. Следует
учесть, что при выборе того или иного типа робота, порою определяющими
являются требования, предъявляемые к блоку питания.
Рис.1.2 Схема интеллектуального робота: 1-манипуляторы, 2 – устροйствο
передвижения, 3 - устройство преобразования программ, 4 - вычислительное
устройство, 5-искусственвый интеллект, 6 - сенсорное устройство, 7 - устройство
общения, 8 - блок питания.
Исполнительная система является силовой частью робота. Ее основная
функция – активное силовое взаимодействие с внешней, средой аналогичное
взаимодействию человека. В составе наиболее развитого интеллектуального робота
она участвует в реализации функции самонастройки
и самоорганизации
(пространственной ориентации сенсорного устройства и блока питания,
самосовершенствования внешней среды).
Эти функции реализуются манипуляторами, устройствами передвижения и
вспомогательными устройствами исполнительной системы. Неотъемлемой частью
любого (подвижного, стационарного) робота является манипулятор – механическая
рука, которая предназначена для реализации главной внешней функции робота для
10
активного силового взаимодействия с внешней средой. Она совместно со
вспомогательными устройствами исполнительной системы и под воздействием
устройства управления ориентирует сенсорное устройство (и блок питания в
отдельных случаях) в пространстве, совершенствует структуру робота, что придает
роботу свойства структурной адаптации (приспособления) к изменениям внешней
среды. Другой неотъемлемой составляющей ИС является устройство передвижения,
если
робот подвижный. В роботах применяются такие же средства передвижения,
какие сегодня используются в движущихся технических объектах в море, в воздухе,
на суше, включая шагающие механизмы.
Состав вспомогательных устройств исполнительной системы может быть
различным и зависит от функционального назначения робота. Они служат для
расширения функциональных возможностей манипуляторов при выполнении
технологических (производственных)
операций и для выполнения других функций
ИР, не осуществимых имеющимися манипуляторами и устройствами передвижения
в составе ИР.
Устройство управления (УУ) интеллектуального робота (рис.1.1) служит для
обеспечения роботу свойства интеллектуального поведения на основе адаптивного
и целенаправленного информационного взаимодействия с внешней средой.
УУ содержит (рис.1.2): сенсорное устройство(6) для активного восприятия
текущей информации о
внешней среде и о состояниях самого робота; оно
выполняется в виде системы технического зрения, локационных, силомоментных,
тактильных датчиков и других различных измерительных преобразователей с
микропроцессорной обработкой информации; устройство общения (7) - для диалога
(образного)робота с оператором и другими функциональными устройствами
внешней среды; данное устройство особенно необходимо для гибкой перенастройки
робота к
той проблемной области (к определенному классу состояний внешней
среды), в которой ему предстоит функционировать; искусственный интеллект (5) -
для распознавания образов, накопления и корректировки знаний в определенной
проблемной области, и для планирования поведения робота на основе
взаимодействия с устройством общения, с сенсорным и вычислительным
устройствами, он физически, в упрощенном варианте, представляет собой
набор
машинных носителей информации (магнитных дисков, лент и др.) двух типов: на
одних записываются программы, на других информационные данные;
вычислительное устройство (4) - для формирования управляющих программ (на
основе взаимодействия с искусственным интеллектом, сенсорным устройством и
устройством общения) передачи программ устройству преобразования программ;
устройство преобразования программ (3) - для преобразования управляющих
программ, поступающих от вычислительного
устройства в вид, необходимый для
управления приводами манипуляторов, устройствами передвижения, блоком
питания робота и производственным оборудованием внешней среды.
Внешняя среда на рис. 1.2 - это та часть реально существующей физической
среды, которая осуществляет информационное материальное и энергетическое
взаимодействие с данным роботом. Если робот функционирует в производственных
условиях, внешнюю среду для него образует
совокупность из оператора, других
роботов, технического оборудования, технологических процессов, транспортно-