Назаров Х.Н. Робототехнические системы и комплексы
Подождите немного. Документ загружается.

61
взаимодействия с внешней средой и преобразования полученных материальных
(например, топливных) ресурсов в энергию.
Исполнительная система является силовой частью МРС. Ее основная
функция - активная силовое взаимодействие с внешней средой. В составе развитых
МРС она участвует в реализации функции самонастройки и самоорганизации. Эти
функции реализуются манипуляторами, устройствами передвижения и
вспомогательными устройствами исполнительной
системы, основной частью МРС
из них является манипулятор - механическая рука, которая предназначена для
реализации главной внешней функцией МРС для активного силового
взаимодействия с внешней средой.
Другой неотъемлемой составляющей исполнительных подсистем является
устройство передвижения. В МРС применяются такие же средства передвижения,
которые сегодня используются в движущихся технических объектах на море,
воздухе на
суше, включая помогающий механизм. Вспомогательные устройства
МРС служат для расширения функциональных возможностей МРС при выполнении
технологи резких операций.
Устройство управления МРС служит для обеспечения функциональных
свойств интеллектуального поведения на основе активного и целенаправленного
информационного взаимодействия с внешней средой.
9.2. Классификация МРС
Мобильные робототехнические системы можно классифицировать по
различным признакам.
На
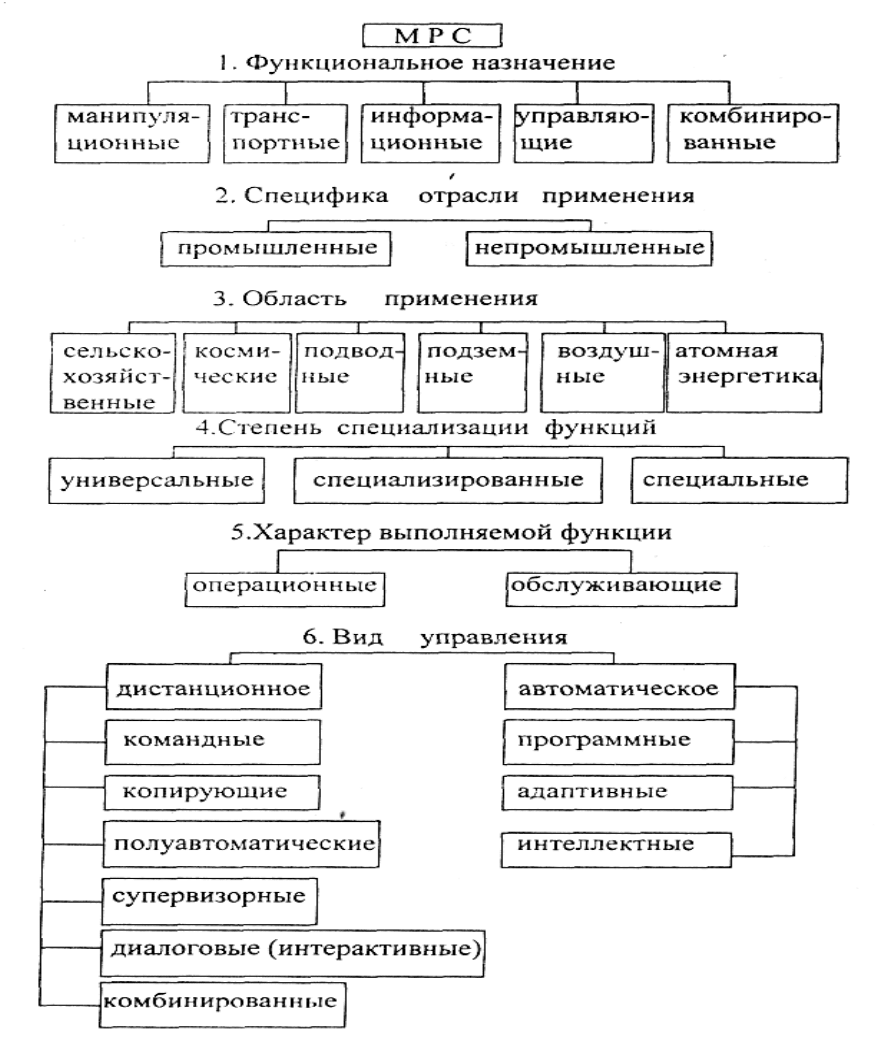
рис.9.2 представлена содержательная классификационная схема
мобильных робототехнических систем. Признаками, характеризующими МРС,
являются функциональные назначения, специфика отрасли применения, область
применения, степень специализации функции, характер выполняемых функций, вид
управления, способ программирования, тип сенсорных устройств, принципы
движения, число движителей, вид исполнительного привода, вид системы
автоматического вождения и системы автоматического направления движения [4].
По функциональному
назначению МРС могут быть разделены на 5 классов:
манипуляционные, транспортные, информационные, управляющие и
комбинированные. По специфике отрасли применения различают промышленные и
непромышленные МРС. Промышленные МРС (робокары) в основном применяются
в машиностроительной промышленности.
По областям применения непромышленные МРС различают на
сельскохозяйственные, подземные, подводные, воздушные, космические и по
атомной энергетике.
По степени специализации функции
МРС делятся на 3 типа: универсальные,
специализированные и специальные.
Универсальные МРС предназначены для выполнения разных операций и, в
том числе - для работы совместно с различными видами оборудования.
Специализированные МРС имеют более узкое назначение и осуществляют одну
определенную операцию (например, сварку, окраску, обработку почв, монтаж
62
конструкций и т.д.), а специальные МРС выполняют только одну конкретную
операцию (например, сбор винограда, обслуживание конкретной модели
технологического оборудования).
По характеру выполняемых функций МРС подразделяются на МРС,
осуществляющие основные технологические операции, и МРС, выполняющие
вспомогательные технологические операции по обслуживанию различного
оборудования. Соответственно, первые МРС можно назвать операционными
(основными) а
вторые - обслуживающими (вспомогательными).
Рис. 9.2. Классификация МРС по общим признакам.
Примером операционных МРС являются сварочные, сборочные, буровые,
мобильные, робототехнические системы, а обслуживающими - робокары,
предназначенные для транспортировки, загрузки-разгрузки деталей, инструментов.
63
По виду управления МРС делят на два класса: автоматические и дистанционные
(телеуправление).
Автоматически управляемые МРС бывают: программные, адаптивные и
интеллектуальные.
Программные МРС, в которых управление осуществляется по заранее
составленной и остающейся неизменной в процессе реализации управляющей
программы. Практически все МРС, работающие в настоящее время на производстве,
являются программными, сфера применения
которых чрезвычайно широка: это
обслуживание станков, печей, технологических линий, сварочных, погрузочных и
разгрузочных операций и т.д. Ограничения сфера применения программных МРС
определяются их конструкцией, а именно - малым ассортиментом информационно-
измерительных датчиков, несовершенством управляющей системы. МРС с
программным управлением не могут функционировать самостоятельно, любое
отклонение от условий, заданных программы ведет к
остановке, а в отдельных
случаях - и к выходу МРС из строя. В значительной мере эта ограниченность
преодолена в МРС второго поколения, или в так называемых адаптивных МРС. Они
имеют существенно большой набор сенсорных датчиков внутренней и внешней
информации и более сложную систему управления, обычно реализуемую на базе
управляющей ЭВМ. Сенсорные
датчики - искусственные органы чувств - являются
источниками сигналов обратно связи для управляющей системы, которая формирует
законы управления исполнительными механизмами МРС с учетом фактической
обстановки.
Интеллектуальные МРС - третье поколение - имеют более богатое
очувствление, с микропроцессорной обработкой информации, распознаванием
обстановки с автоматической выработкой решения о своих дальнейших действиях
для выполнения нужных операций в неопределенной
или меняющейся обстановке.
9.3. Мобильная РТС. Робокара МП-12Т с датчиками внешней информации.
МРС в машиностроении в основном применяются для автоматизации
транспортных операций . Основными операциями, реализуемыми транспортными
МРС, являются: перемещение заготовок, деталей и полуфабрикатов по территории
цехов и участков производства в соответствии с технологическими маршрутами и
их обработкой, подача обрабатываемых
деталей на рабочую позицию
технологического оборудования, а также подача инструмента с централизованного
склада или с метрологических станций.
Важным элементом автоматизированных, транспортных и накопительных
систем являются транспортные МРС.
Р о б о к а р ы. Напольные, безрельсовые тележки - робокары - созданы для
применения в гибких производственных системах. Их особенностями являются
наличие
на борту следящей системы, обеспечивающей программируемое
перемещение по замкнутой индуктивной или светоотражающей трассе, проложены
в полу или на полу производственного помещения. Робокары могут оснащаться
устанавливаемыми на их борту промышленными роботами или различными
автоматическими загрузочно-разгрузочными механизмами, взаимодействующими
64
со стационарными приемно-передающими устройствами или накопителями на
рабочих местах и автоматизированном складе.
Применение робокар в качестве внутрицехового или межцехового транспорта
в целом ряде механосборочных производств обеспечивает: высокую маневренность
при небольших по ширине проездах и проходах, простоту перестройки
транспортной трассы при изменении технологического процесса, возможность
оптимизации грузопотоков, высокую надежность за счет
смены отказавших
транспортных средств, возможность перехода с автоматического на ручное
управление [4,11].
С использованием робокар ликвидируются простои оборудования,
высвобождаются водители внутрицехового транспорта и рабочие, занятые на
погрузочно-разгрузочных операциях, достигается высокая энергоэкономичность
приводов транспортных средств. Рассмотрим как пример схему функционирования
робокары МП-12Т. По команде датчиков “требуется заготовка” система управления
автоматизированного
склада определяет адрес поступающей команды и робот-
штабелер доставляет тару с заготовками на приемно-отгрузочную позицию. Тара
имеет кодовый номер, который хранится в оперативной памяти бортовой микро-
ЭВМ. Грузовая платформа робокары рассчитана на размещение 10 тарных ящиков.
Робокара начинает движение по трассе, считая номера встречаемых рабочих мест.
При совпадении номеров рабочего места
и тары, имеющейся на платформе,
робокара останавливается, корректирует свое положение по электронно-
оптическому датчику и устанавливает на рабочее место требуемую тару.
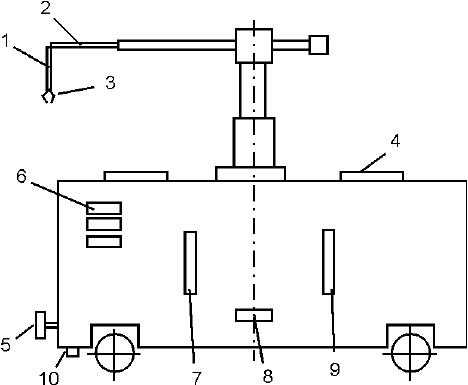
Расположение датчиков внешней информации на робокаре МП- 12Т показано на
рис. 9.3. При наличии на данном рабочем месте тары с готовыми деталями робот
устанавливает ее на освободившееся место платформы. Тару
с готовыми деталями
робокара доставляет к автоматизированному складу и сгружает ее на приемно-
отправочные устройства.
Рис. 9.3. Расположение датчиков внешней информацией на робокаре МП-12Т:
1 - наличие тары на исходной позиции; 2 - взятие груза; 3 - открытие захвата; 4 -
наличие тары в ячейках платформы; 5 - безопасность движения; 6 - связи; 7 -
опознавание объектов и торможения; 8 - коррекции положения робокары на рабочем
месте; 9 - остановка робокары; 10 - слежение за светоотражающей полосой
(трассой).
65
В настоящее время в машиностроении сложилось два направления в создании
и внедрении транспортных роботов.
Первое направление характеризуется специализацией транспортных роботов,
полной автоматизацией перемещения узкой номенклатуры предметов производства
(отдельных деталей, заготовок, полуфабрикатов) по заданным маршрутам между
рабочими местами, единицами основного технологического оборудования в
соответствии с технологической циклограммой обработки и перемещения деталей
на автоматизированных участках с предметной специализацией.
Второе направление характеризуется специализацией транспортных роботов
на автоматизацию перемещения единиц транспортно-технологической оснастки, в
которых находятся обрабатываемые заготовки и детали или комплекты
инструментов в оснастки на автоматизированных участках с предметной или
технологической специализацией. Кроме того, транспортные роботы, оснащенные
системами группового управления, оборудованием, используются для
автоматизации
операций перемещения между смежными по технологическому
процессу участками и цехами, а также для автоматизации операции и процессов
перемещения между складами и участками цеха или производственного корпуса
предприятия.
В зависимости от назначения, технологических особенностей применения и
выполняемых функций на промышленных предприятиях внедряются транспортные
роботы с верхним расположением пути (монорельсовые, пространственные или
мостовые) с нижним размещением пути (напольные, рельсовые или безрельсовые) и
с комбинированным расположением пути, когда одна из опор транспортного робота
движется по верхнему подкрановому пути, а другая опора (тележка) - по
напольному или ниже расположенному рельсу.
Транспортные роботы могут иметь подвижные и неподвижные захваты,
которые в свою очередь могут быть активными (могут
захватывать, удерживать с
необходимым усилием при выполнении операции и освобождать от зажима
перемещаемый предмет при окончании выполненной операции перемещения) и
пассивными (только поддерживать перемещаемым предмет без необходимого
усилия захватывания) [4].
9.4. Сельскохозяйственные МРС
Широкие возможности для комплексной автоматизации открывает
робототехника в сельском хозяйстве. Основные особенности применения здесь
средств робототехники заключаются в большой территориальной протяженности и
разобщенности предприятий, сезонности работ, сильной зависимости от погодно-
климатических условий, в непосредственном контакте с животными и растениями,
имеющими большую разбросанность характеристик и существенные специфические
требования по взаимодействию с
ними.
Одной из важных задач в полеводстве является создание роботов и
робототехнических систем для вождения тракторов, комбайнов и других машинно-
тракторных агрегатов с высвобождением самой массовой здесь профессии –
механизаторов.
66
Роботы-механизаторы должны быть приспособлены для замены механизатора
на его стандартном рабочем месте. Это позволит оперативно использовать такие
роботы на серийных машинно-тракторных агрегатах, заменять механизаторов при
выполнении работ особо опасных (внесение ядохимикатов) или утомительных
(вождение культиваторов и т.п.) осуществлять групповое вождение тракторов и
других машин с роботами-механизаторами
за трактором-лидером ведомым
механизатором.
Замена механизаторов роботами позволит повысить производительность
агрегатов, сменность, ритмичность и качество работы, снизить расход топлива.
Одна из наиболее трудоемких отраслей сельскохозяйственного производства –
овощеводство и картофелеводство. Поэтому, здесь в частности, особенно остро
стоит проблема нехватки рабочей силы, разрешить которую можно с помощью
роботов. Кроме того, производительность труда
на ряде операций в этом случае
ограничена физическими возможностями человека. Например, для укладки рассады
в высаживающий аппарат требуется иметь сажальщиц на каждой рассадо-
посадочной машине, которые должны работать в ритме - примерно одна операция в
секунду в условиях тряски, пыли, при различной погоде.
В теплицах применение подвижных роботов позволит комплексно
автоматизировать
большой круг работ по подготовке почвы, высеву семян,
опрыскиванию химикатами, сбору готовой продукции (рассады, овощей, фруктов),
их сортировке и укладке в тару.
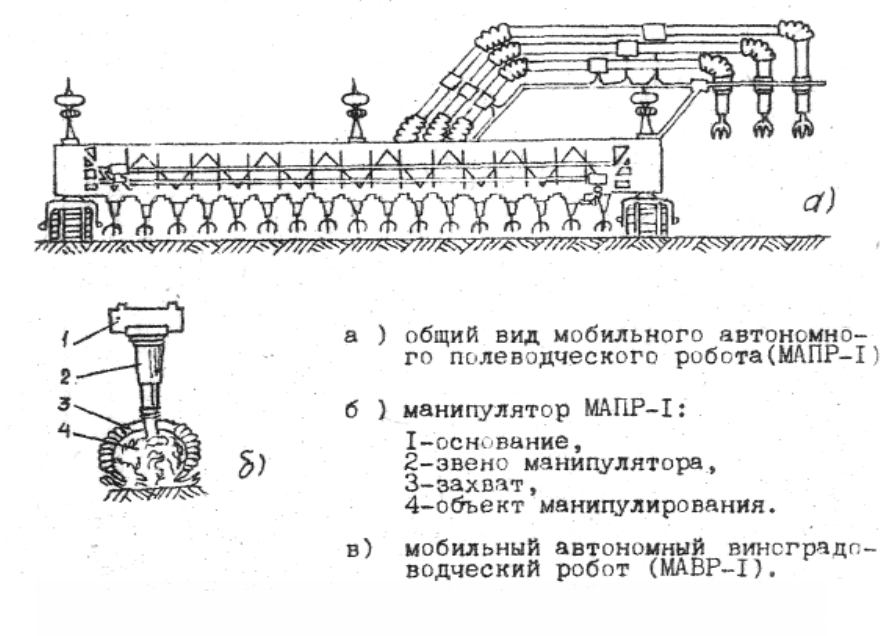
В России разработан ряд сельскохозяйственных МРС. Примером таких МРС
является универсальный мобильный автономный полеводческий робот «МАПР-1»
(рис.9.4), разработанный в Московском институте инженеров
сельскохозяйственного производства.
Рис. 9.4. Примеры сельскохозяйственных МРС (начало рис.).
67
Рис. 9.4. Примеры сельскохозяйственных МРС.
«МАПР-1» предназначен для автоматизации многих технологических
операций открытого грунта: вспашки, культивации, посева, ухода и уборки
различных сельскохозяйственных культур.
В «МАПР-1» в качестве устройства передвижения использован блок из
четырех колес. Он имеет блок манипуляторов со сменными «кистями»,
гидравлическим приводом.
Блок питания выполнен в виде централизованного источника.
Функции
вычислительного устройства выполняет бортовое микропроцессорное устройство, а
функции устройства автоматического управления – локальная управляющая
машина. Искусственный интеллект «МАПР-1» реализован на основе блоков отбора
образов и микропроцессорного блока. В качестве сенсорных устройств
использованы расположенная в центре кисти манипулятора телекамера и
тактильные датчики.
Оснасткой «МАПР-1» являются магнитный секатор, транспортер,
инструменты и приспособления.
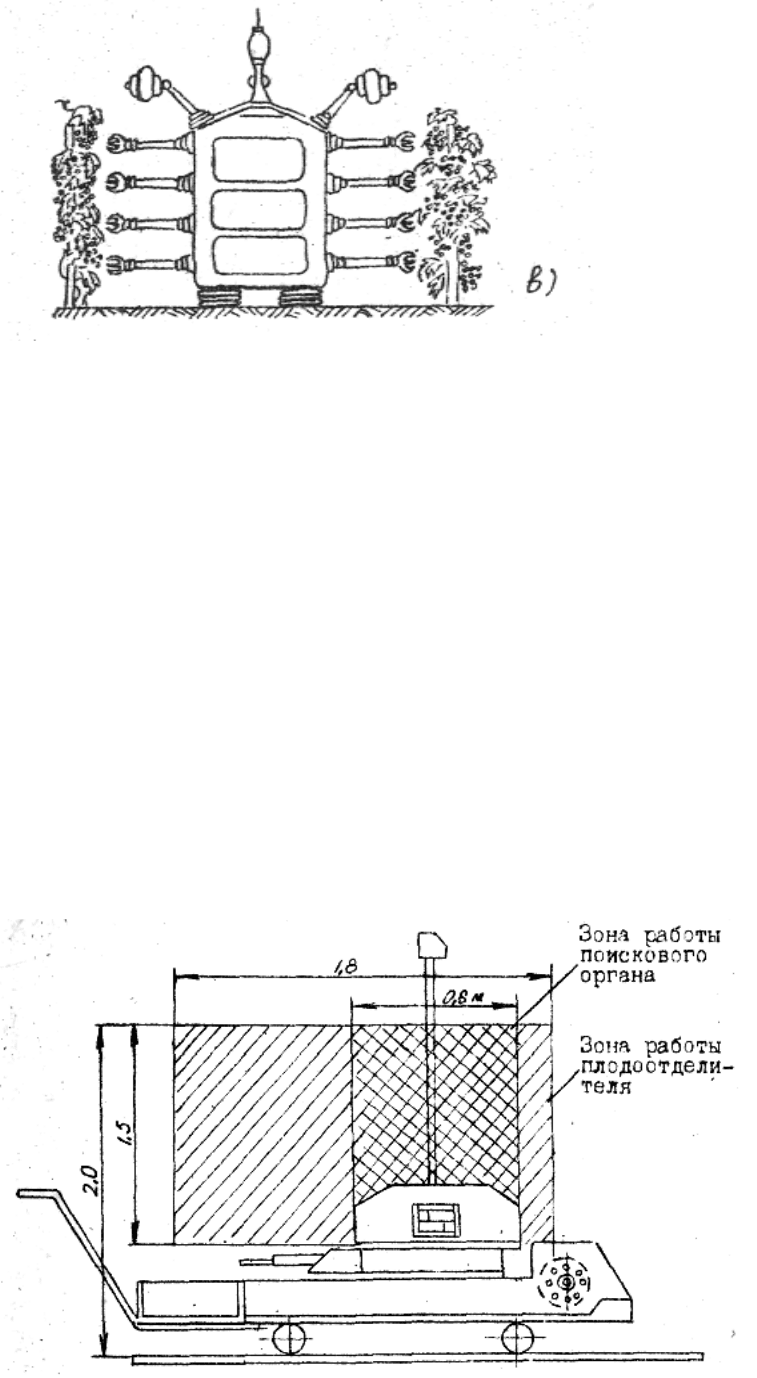
Рис .9.5. Схема MРC для уборки огурцов.
68
В НПО ВИСХОМ разработан и испытан макетный образец МРС УМ-0,1 для
уборки огурцов (рис.9.5). В качестве системы технического зрения использовано
специально разработанное оптико-механическое сканирующее устройство поиска
плода [4].
Плод надежно захватывается специальным манипулятором с ременным
схватом с оптическим датчиком. В нижней части машины размещены механизмы
электропривода ходовой части, подъемного механизма, кабельномоточного
устройства и элементы систем автоматического управления. Исполнительные
механизмы с приводом от двигателей постоянного тока перемещают захват в любую
точку рабочей зоны.
Устройство передвижения машины–робота - колесное. В нем использовано в
качестве сенсорного устройства система технического зрения и оптический датчик
положения.
МРС работает следующим образом. Оператор устанавливает контейнер для
плодов на
грузовую площадку, заводит машину в междурядье и включает
электропривод. Плоды собираются в соответствии с заданным алгоритмом. При
непрерывном подъеме блока поисковых органов и отделителя плоды отыскиваются
двумя сканирующими системами одновременно. При обнаружении плода
подъемная часть машины останавливается и схват ориентируется по нормам к оси
плода поворотным механизмом, затем растения схват возвращается
в исходное
положение и сбрасывает плод [4].
9.5. Роботизация хлопкоуборочных машин
Уровень автоматизации хлопкоуборочных машин (ХУМ) весьма низок.
Разработаны лишь локальные системы автоматического управления отдельными
узлами и движением, копирования рельефа, регулирования зазора между
шпиндельными барабанами.
Целесообразность постановки и решения проблемы роботизации
хлопкоуборочных машин определяется следующими факторами :
тяжелыми условиями работы механизатора (
пыль,жаркие климатические
условия, шум, вибрация);
несоответствием настройки узлов машины требованиям эксплуатации ХУМ
из-за недостаточной квалификации механизаторов ;
невозможностью круглосуточной работы механизатора.
Решить поставленную задачу можно в несколько этапов. На начальном этапе
актуальна оптимизация режимов работы ХУМ, что связано с задачами контроля
качества сбора, технического состояния машины, адаптивной подстройки рабочих
органов
в зависимости от урожайности, автоматической остановки машины при
резких отклонениях режимов от оптимальных. На этом этапе присутствие
механизатора необходимо. На конечном этапе все функции механизатора должны
выполняться роботизированной хлопукоуборочной машиной (РХУМ).
Один из возможных вариантов блок-схемы роботизированной ХУМ приведен
на рис.9.6. Здесь ХУМ управляется адаптивным роботом (АР), представляющим
собой
техническую систему, в состав которой входят четыре подсистемы:
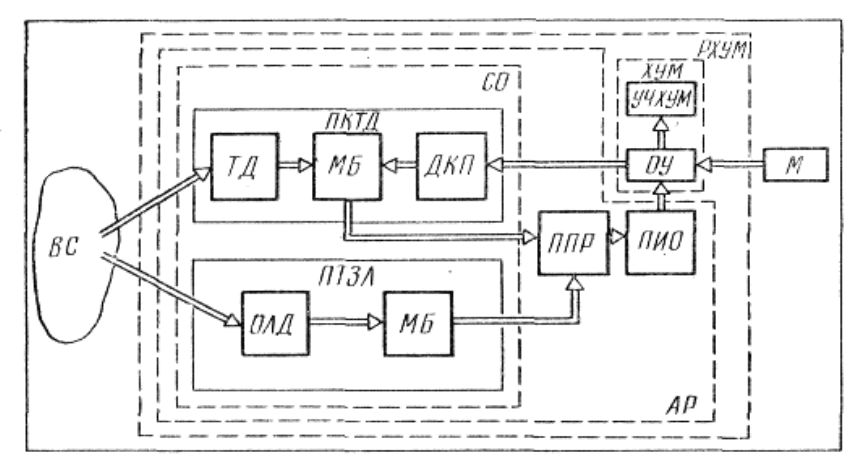
69
технического зрения и локации; контроля и технической диагностики машины;
исполнительных органов и принятия решения. Подсистема технического зрения и
локации (ПТЗЛ) и подсистема контроля и диагностики (ПКТД) образуют систему
очувствления (СО) робота. Подсистема принятия решения (ППР) выполняет
функции управления, а подсистема исполнительных органов (ПИО) – роль
манипулятора. В основу ПИО в зависимости от
модификации самой
хлопкоуборочной машины могут быть положены приводы электромеханического,
пневмо- и гидравлического типов на базе многовыходных линейных приводов [4].
Рис.9.6. Блок-схема роботизированной хлопкоуборочной машины: ВС —
внешняя среда; ТД — тактильные датчики; МБ — микропроцессорный блок; ДКП
— датчики контроля и положения; ОЛД — оптические и локационные датчики; УЧ
ХУМ — управляемая часть хлопкоуборочной машины; М — механизатор.
Здесь задача создания манипулятора и органов управления (ОУ)
хлопкоуборочной машины должна решаться комплексно, т.е. органы
управления
при адаптивном роботе могут отличаться от органов управления, предназначенных
для механизаторов.
Подсистема принятия решений на основе информации, поступающей с СО,
решает задачу цифрового управления исполнительными органами и включает в себя
микропроцессор (микро-ЭВМ), блок формирования команд, логические схемы и
другие блоки. Ядро системы управления – микропроцессор, принимающий сигналы
с выходов логических
схем и вырабатывающий управляющие воздействия, по
которым блок формирования команд управляет исполнительными органами. Они, в
свою очередь, устанавливают органы управления ХУМ в необходимое положение.
Система технического зрения (СТЗ) выполнена на фоточувствительных
схемах с зарядовой связью (ФСЗС) и состоит из трех блоков: панорамного обзора и
обнаружения препятствий; привязки к конкретным точкам
картины хлопкового поля
и обеспечения визуальной обратной связи для коррекции движения; детального
поэлементного исследования картины поля.
70
Автоматизация управления ХУМ при помощи технического зрения на базе
ФСЗС позволяет обеспечить бесконтактный быстродействующий съем информации
при достаточной точности измерений, надежности, экономичности, долговечности.
Для адаптивной подстройки рабочих органов ХУМ, ее направленного
автоматического движения по хлопковому полю подсистема технического зрения
должна определять:
- среднюю степень раскрытости хлопковых коробочек на информационном
поле (сканируемый
СТЗ участок хлопкового поля) шириной x и длиной у первого и
второго хлопковых рядков (d
cpk1,
d
cpk2
);
- координаты середины первого и второго рядов (xср1, xср2);
- рассогласование для коррекции движения ХУМ (ε, α);
- урожайность на информационном поле первого и второго хлопковых рядов
(р1, р2);
- количество собранного хлопка с первого и второго хлопковых рядов (∆р1,
∆р2);
- качество сбора по первому и второму рядкам (П1, П2);
В
подсистеме технического зрения информация распределения освещенности
информационного поля преобразуется в функцию распределения амплитуд по
каждой точки информационного поля:
Е
ип
= f(x, y) → А = f(x, y).
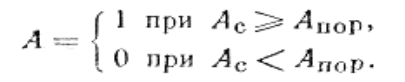
На рис.9.7 приведены зависимости амплитуд сигналов элементов хлопкового
поля от освещенности Е и длины λ волны излучения, из которых видно, что уровень
сигнала от хлопкового волокна выше уровней сигналов от других элементов
хлопкового поля. Полезный сигнал, идущий от хлопкового волокна, выделить из
общего сигнала А
с
можно выбором такой пороговой амплитуды А
пор
, при которой
Данное преобразование позволяет выделить раскрытые хлопковые коробочки
и их распределение на информационном поле и по этим данным реализовать
вышеуказанные функции.
Параметр средней степени раскрытости хлопковых коробочек в каждом ряде
при одном сканировании информационного поля можно оценить следующим
образом:
d
k
=
∑
=
=
1t
0t
k
∆t/N ,
где k - коэффициент, учитывающий погрешность перекрывания и совмещения
раскрытых хлопковых коробочек;
t
1
- время сканирования одного рядка;
∆t - длительность импульса, соответствующая размеру сечения коробочки;