Руководство. Расширенное программирование, Справочник по программированию Sinumerik 840D (new)
Подождите немного. Документ загружается.

Защищенные области
3.3 Проверка нарушения защищенной области, ограничения рабочего поля и программных лимитов
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
241
N120 cprotdef(4, false, 0)
N130 g17 g1 x0 y15
N140 x10
N150 y25
N160 x0
N170 y15
N180 execute(_SB)
; Относящаяся к детали защищенная
область
N190 nprotdef(3, false, 0)
N200 g17 g1 x10 y5
N210 x25
N220 y15
N230 x10
N240 y5
N250 execute(_SB)
; Относящаяся к станку защищенная
область
N260 cprot(2,2,0, 0, 0)
N270 cprot(4,1,0, 0, 0)
N280 nprot(3,2,0, 0, 0)
; Активировать или предварительно
активировать защищенные
области
N290 g25 XX=–YY=–
N300 g26 xx= 20 yy= 21
N310 _STARTPOS[0] = 0.
N320 _STARTPOS[1] = 0.
N330 _STARTPOS[2] = 0.
; Определить ограничения рабочего
поля
N340 _MOVDIST[0] = 35.
N350 _MOVDIST[1] = 20.
N360 _MOVDIST[2] = 0.
N370 _DLIMIT[0] = 0.
N380 _DLIMIT[1] = 0.
N390 _DLIMIT[2] = 0.
N400 _DLIMIT[3] = 0.
N410 _DLIMIT[4] = 0.
;различные вызовы функций
N420 _STATUS = calcposi(_STARTPOS,_MOVDIST,
_DLIMIT, _MAXDIST)
N430 _STATUS = calcposi(_STARTPOS,_MOVDIST,
_DLIMIT, _MAXDIST,,3)
N440 _STATUS = calcposi(_STARTPOS,_MOVDIST,
_DLIMIT, _MAXDIST,,1)
; Другая стартовая точка
N450 _STARTPOS[0] = 5.
N460 _STARTPOS[1] = 17.
N470 _STARTPOS[2] = 0.
; Другая цель
Программный код Комментарий
Защищенные области
3.3 Проверка нарушения защищенной области, ограничения рабочего поля и программных лимитов
Расширенное программирование
242 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
N480 _MOVDIST[0] = 0.
N490 _MOVDIST[1] =–.
N500 _MOVDIST[2] = 0.
;различные вызовы функций
N510 _STATUS = calcposi(_STARTPOS,_MOVDIST,
_DLIMIT, _MAXDIST,,14)
N520 _STATUS = calcposi(_STARTPOS,_MOVDIST,
_DLIMIT, _MAXDIST,, 6)
N530 _DLIMIT[1] = 2.
N540 _STATUS = calcposi(_STARTPOS,_MOVDIST,
_DLIMIT, _MAXDIST,, 6)
N550 _STARTPOS[0] = 27.
N560 _STARTPOS[1] = 17.1
N570 _STARTPOS[2] = 0.
N580 _MOVDIST[0] =–.
N590 _MOVDIST[1] = 0.
N600 _MOVDIST[2] = 0.
N610 _DLIMIT[3] = 2.
N620 _STATUS = calcposi(_STARTPOS,_MOVDIST,
_DLIMIT, _MAXDIST,, 12)
N630 _STARTPOS[0] = 0.
N640 _STARTPOS[1] = 0.
N650 _STARTPOS[2] = 0.
N660 _MOVDIST[0] = 0.
N670 _MOVDIST[1] = 30.
N680 _MOVDIST[2] = 0.
N690 trans x10
N700 arot z45
N710 _STATUS = calcposi(_STARTPOS,_MOVDIST,
_DLIMIT, _MAXDIST)
N720 M30
Программный код Комментарий
Защищенные области
3.3 Проверка нарушения защищенной области, ограничения рабочего поля и программных лимитов
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
243
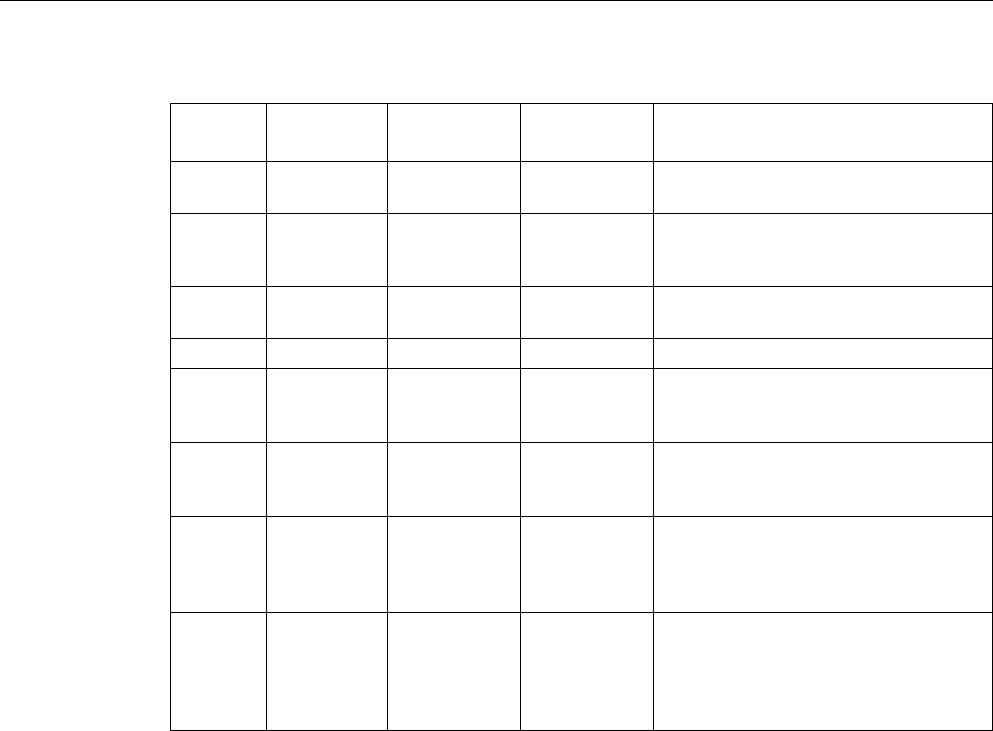
Результаты проверок на примере:
Особые случаи и прочие подробности
Все характеристики перемещения всегда в размере радиуса, и для поперечной оси с
активной G"DIAMON". Если путь одной из участвующих осей не может быть пройден
полностью, то в возвращаемом значении _MAXDIST и пути других осей соответственно
уменьшаются таким образом, что результирующая конечная точка лежит на заданной
траектории.
Допускается, что для одной или нескольких участвующих осей программные лимиты
или ограничения рабочего поля или защищенные области не определены. Все границы
контролируются только в том случае, если участвующие оси реферированы. Возможно
участвующие круговые оси контролируются только в том случае, если они не являются
осями модуло.
Контроль программных лимитов и ограничений рабочего поля, как и в обычном режиме
перемещения, зависит от активных установок (интерфейсные сигналы для выбора
программных лимитов 1 или программных лимитов 2, GWALIMON/WALIMOF,
установочные данные для индивидуальной активации ограничений рабочего поля и
для определения, должен ли при контроле ограничений рабочего поля учитываться
радиус активного инструмента или нет).
Для определенных кинематических трансформаций (к примеру, TRANSMIT) позиция
осей станка не может быть однозначно определена из позиций в системе координат
детали (WCS) (многозначность). В обычном режиме перемещения однозначность
следует, как правило, из предыстории и условия, что непрерывному движению в WCS
№ кадра
N...
_STATUS _MAXDIST
[0] (= X)
_MAXDIST
[1] (= Y)
Примечания
420 3123 8.040 4.594 Нарушение защищенной области SB
N3.
430 1122 20.000 11.429 Нет контроля защищенной области,
нарушение ограничения рабочего
поля.
440 1121 30.000 17.143 Активен только контроль
программных лимитов.
510 4213 0.000 0.000 Нарушение стартовой точки SB C4
520 0000 0.000 –.000 Предварительно активированная SB
C4 не контролируется. Заданный путь
может быть пройден полностью.
540 2222 0.000 –.000 Из-за _DLIMIT[1]=2 путь перемещения
сокращается через ограничение
рабочего поля.
620 4223 –.000 0.000 Расстояние до C4 из-за C2 и
_DLIMIT[3] всего 4 мм. Интервал C2 –
N3 в 0.1 мм не приводит к
ограничению пути перемещения.
710 1221 0.000 21.213 Фрейм со смещением и вращением
активен. Допустимый путь
перемещения в _MOVDIST действует
в смещенной и повернутой системе
координат (WCS).
Защищенные области
3.3 Проверка нарушения защищенной области, ограничения рабочего поля и программных лимитов
Расширенное программирование
244 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
должно соответствовать непрерывное движение осей станка. Поэтому при контроле
программных лимитов с помощью функции CALCPOSI в подобных случаях для
разрешения многозначности используется актуальная позиция станка. Поэтому при
необходимости перед CALCPOSI следует запрограммировать STOPRE, чтобы
получить возможность обеспечения функции действительными позициями осей станка.
Не гарантируется, что при движении по заданному пути перемещения
специфицированный в _DLIMIT[3] интервал до защищенных областей будет соблюден
везде. Для этого при удлинении возвращенной в _MOVDIST конечной точки на этот
интервал защищенная область не может быть нарушена. Но ход прямой может
пролегать на любом расстоянии от защищенной области.
Примечание
Подробности по ограничению рабочего поля см.
/PG/ Руководство по программированию "Основы",
по программным лимитам см.
/FB1/ Описание функций "Основные функции"; контроли осей, защищенные области
(A3).
Расширенное программирование
Справочник по программированию 02/2011, 6FC5398-2BP40-1PA0
245
4
Специальные команды перемещения
4.1 Подвод к кодированным позициям (CAC, CIC, CDC, CACP, CACN)
Функция
С помощью следующих команд через номера позиция можно перемещать линейные и
круговые оси на сохраненные в таблицах машинных данных фиксированные позиции
осей. Такой тип программирования обозначается как "Подвод к кодированным
позициям".
Синтаксис
CAC(<n>)
CIC(<n>)
CACP(<n>)
CACN(<n>)
Значение
Пример: Подвод к кодированным позициям позиционирующей оси
Литература
• Описание функций "Расширенные функции"; делительные оси (T1)
• Описание функций "Синхронные действия"
CAC(<n>)
Выполнить подвод к кодированной позиции с номером позиции n
CIC(<n>)
Выполнить подвод к кодированной позиции, исходя из актуального
номера позиции, на n-количество позиций вперед (+) или назад (–)
CDC(<n>)
Выполнить подвод к кодированной позиции с номером позиции n по
кратчайшему пути (только для круговых осей)
CACP(<n>)
Выполнить подвод к кодированной позиции с номером позиции n в
положительном направлении (только для круговых осей)
CACN(<n>)
Выполнить подвод к кодированной позиции с номером позиции n в
отрицательном направлении (только для круговых осей)
<n>
Номер позиции в таблице машинных данных
Диапазон значений: 0, 1, … (макс. число мест в таблице - 1)
Программный код Комментарий
N10 FA[B]=300 ; Подача для позиционирующей оси B
N20 POS[B]=CAC(10) ; Выполнить подвод к кодированной позиции с номером
позиции 10
N30 POS[B]=CIC(-4) ; Выполнить подвод к кодированной позиции с
"актуальным номером позиции" - 4
Специальные команды перемещения
4.2 Сплайн-интерполяция (ASPLINE, BSPLINE, CSPLINE, BAUTO, BNAT, BTAN, EAUTO, ENAT, ETAN, PW,
Расширенное программирование
246 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
4.2 Сплайн-интерполяция (ASPLINE, BSPLINE, CSPLINE, BAUTO,
BNAT, BTAN, EAUTO, ENAT, ETAN, PW, SD, PL)
Функция
Аналитически точное описание произвольно изогнутых контуров на деталях
невозможно. Поэтому аппроксимация таких контуров выполняется через ограниченное
число опорных точек, к примеру, при оцифровке поверхностей. Для создания
оцифрованной поверхности на детали опорные точки должны быть объединены в одно
описание контура. Это обеспечивает сплайн-интерполяция.
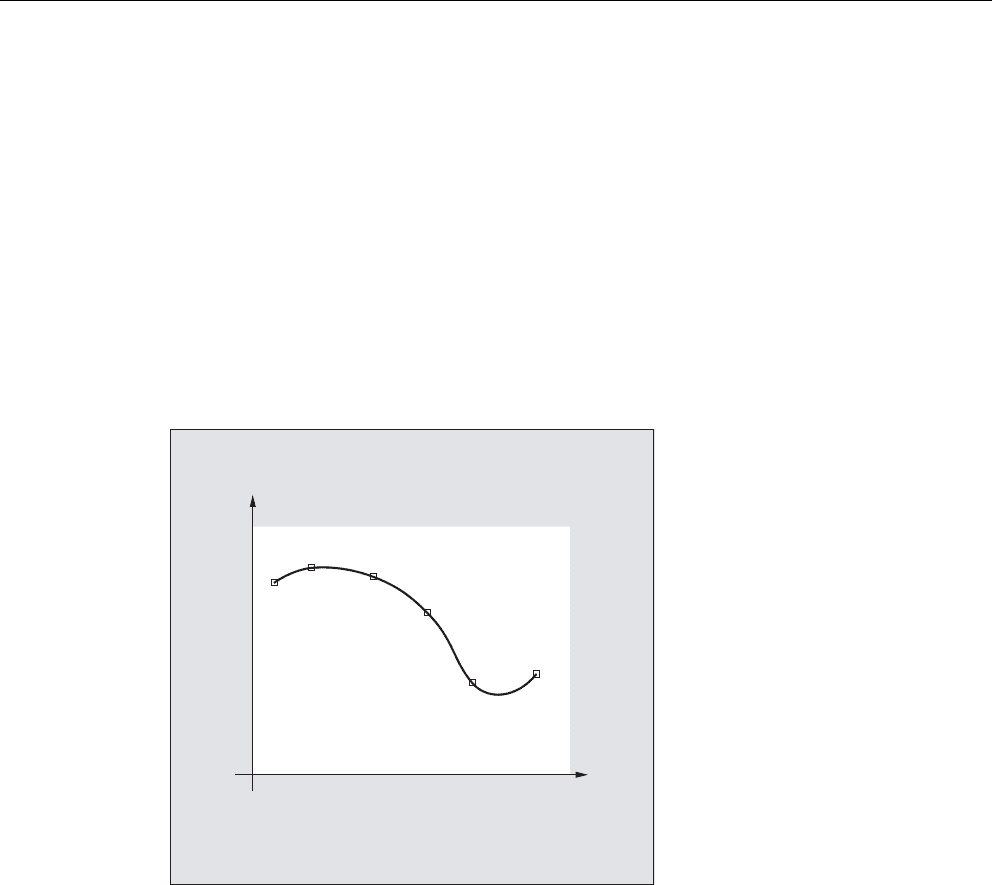
Сплайн определяет кривую, состоящую из полиномов 2-ого или 3-его порядка.
Свойства на опорных точках сплайна могут определяться в зависимости от
используемого типа сплайна .
Следующие типы сплайнов доступны для SINUMERIK solution line:
•A-сплайн
•B-сплайн
•C-сплайн
3
3
3
3
3
3
3͕͋3͎͇͇͔͔͕͕͋͌͑͗͋͢͏͔͇͙͢

Специальные команды перемещения
4.2 Сплайн-интерполяция (ASPLINE, BSPLINE, CSPLINE, BAUTO, BNAT, BTAN, EAUTO, ENAT, ETAN, PW,
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
247
Синтаксис
Общая информация:
ASPLINE X... Y... Z... A... B... C...
BSPLINE X... Y... Z... A... B... C...
CSPLINE X... Y... Z... A... B... C...
Для В-сплайна дополнительно можно запрограммировать:
PW=<n>
SD=2
PL=<значение>
Для A- и C-сплайна дополнительно можно запрограммировать:
BAUTO / BNAT / BTAN
EAUTO / ENAT / ETAN
Значение
Тип сплайн-интерполяции:
ASPLINE
Команда для включения А-сплайн-интерполяции
BSPLINE
Команда для включения В-сплайн-интерполяции
CSPLINE
Команда для включения С-сплайн-интерполяции
Команды ASPLINE, BSPLINE и CSPLINE действуют модально
и относятся к группе команд перемещения.
Опорные точки или контрольные точки:
X... Y... Z...
A... B... C...
Позиции в декартовых координатах
Вес точки (только B-сплайн):
PW
С помощью команды PW для каждой опорной точки можно
запрограммировать т.н. "Вес точки".
<n>
"Вес точки"
Диапазон
значений:
0 ≤ n ≤ 3
Размер шага: 0.0001
Действие: n > 1 Кривая сильнее притягивается к
контрольной точке.
n < 1 Кривая слабее притягивается к
контрольной точке.
Порядок сплайна (только B-сплайн):
SD
Стандартно используется полигон 3-его порядка. Но через
программирование SD=2 возможно и использование полигона
2-ого порядка.
Специальные команды перемещения
4.2 Сплайн-интерполяция (ASPLINE, BSPLINE, CSPLINE, BAUTO, BNAT, BTAN, EAUTO, ENAT, ETAN, PW,
Расширенное программирование
248 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
Расстояние между узловыми точками (только B-сплайн):
PL
Выполняется внутреннее подходящее вычисление расстояний
между узловыми точками. Но СЧПУ может обрабатывать и
заданные расстояния между узловыми точками, которые с
помощью команды PL указываются как т.н. длине интервалов
параметров.
<значение>
Длина интервала параметров
Диапазон
значений:
Как размер перемещения
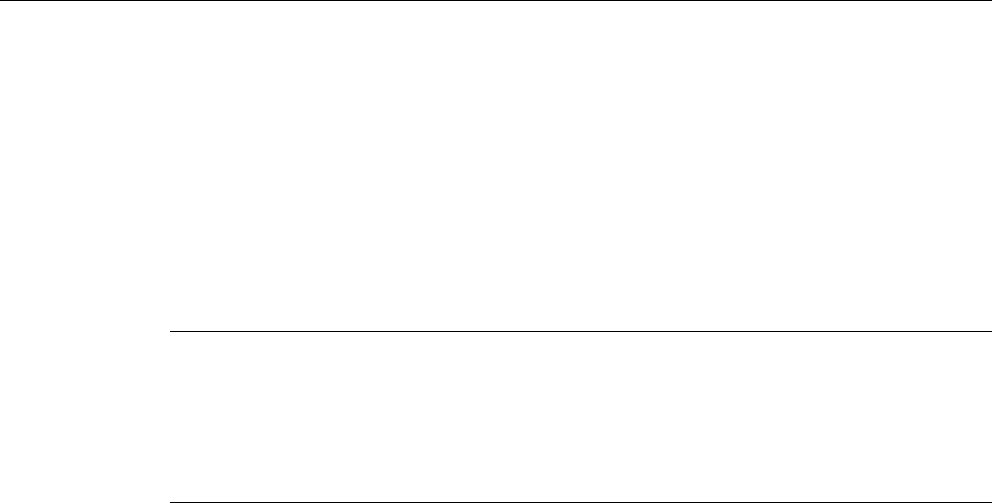
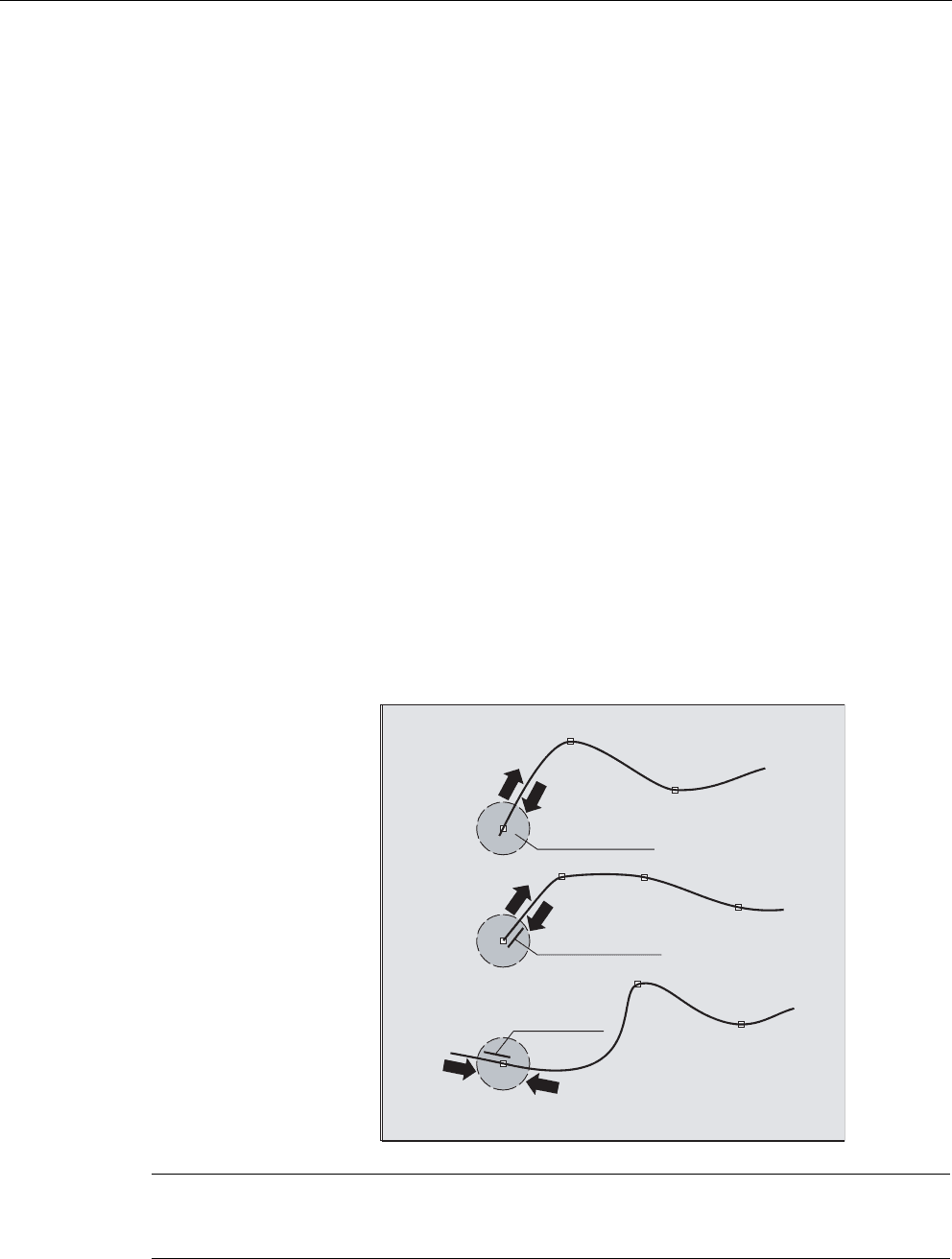
Переходная характеристика в начале сплайна (только A- или C-сплайн):
BAUTO
Данные для переходной характеристики не задаются. Начало
следует из положения первой точки.
BNAT
Изгиб ноль
BTAN
Тангенциальный переход к предшествующему кадру (позиция
стирания)
Переходная характеристика в конце сплайна (только A- или C-сплайн):
EAUTO
Данные для переходной характеристики не задаются. Конец
следует из положения последней точки.
ENAT
Изгиб ноль
ETAN
Тангенциальный переход к предшествующему кадру (позиция
стирания)
(1$7
(7$1%7$1
%1$7
($872
%$872
͇͔͔͔͎͇͇͔͋͌͌͋͢͢
̯͎͊͏͈͔͕͒ͣ
̶͕͌͗͌͋͜
͖͕͇͇͙͔͕͑͌͒ͣ͐͘
Примечание
Программируемая переходная характеристика не влияет на В-сплайн. B-сплайн в
стартовой и конечной точке всегда является тангенциальным к контрольному полигону.
Специальные команды перемещения
4.2 Сплайн-интерполяция (ASPLINE, BSPLINE, CSPLINE, BAUTO, BNAT, BTAN, EAUTO, ENAT, ETAN, PW,
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
249
Граничные условия
• Возможно использование коррекции радиуса инструмента.
• Контроль столкновений выполняется в проекции на плоскость.
Примеры
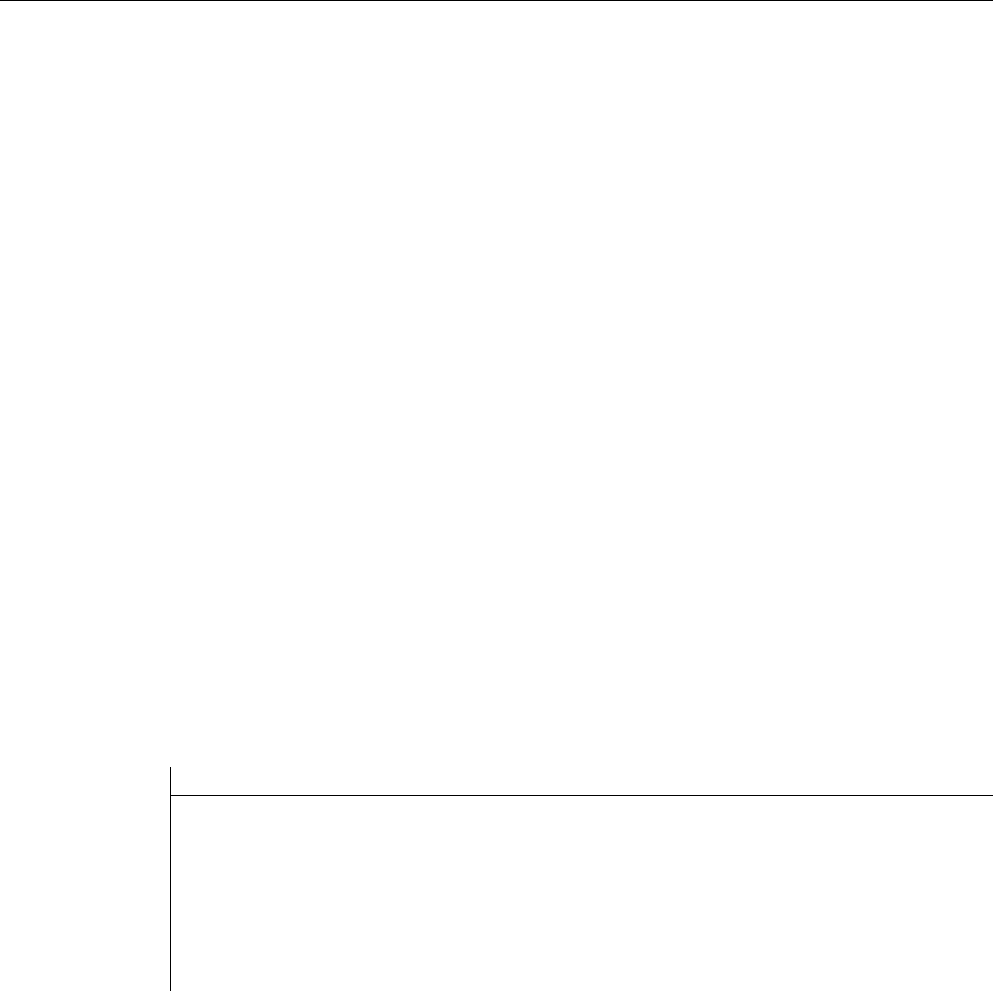
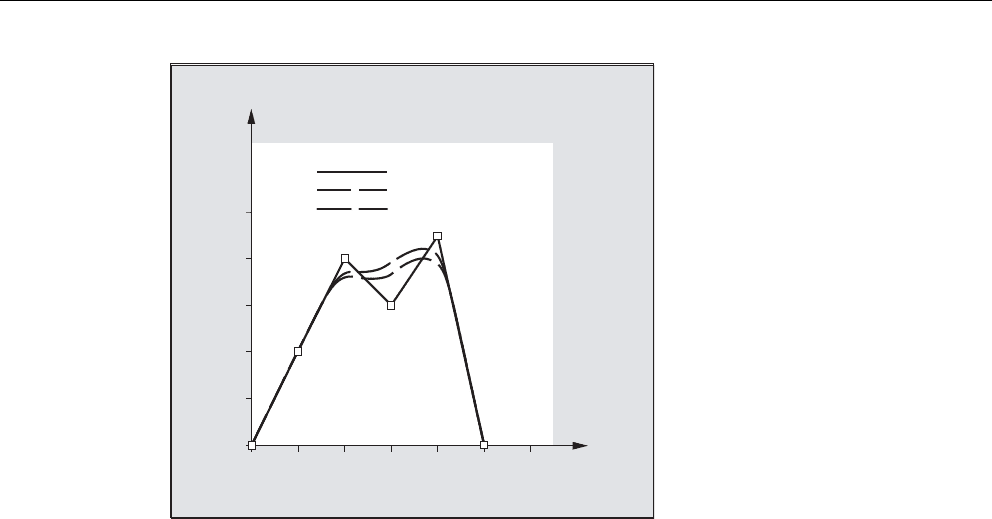
Пример 1: B-сплайн
Программный код 1 (все веса 1)
N10 G1 X0 Y0 F300 G64
N20 BSPLINE
N30 X10 Y20
N40 X20 Y40
N50 X30 Y30
N60 X40 Y45
N70 X50 Y0
Программный код 2 (различный вес)
N10 G1 X0 Y0 F300 G64
N20 BSPLINE
N30 X10 Y20 PW=2
N40 X20 Y40
N50 X30 Y30 PW=0.5
N60 X40 Y45
N70 X50 Y0
Программный код 3 (контрольный полигон) Комментарий
N10 G1 X0 Y0 F300 G64
N20 ; отсутствует
N30 X10 Y20
N40 X20 Y40
N50 X30 Y30
N60 X40 Y45
N70 X50 Y0
Специальные команды перемещения
4.2 Сплайн-интерполяция (ASPLINE, BSPLINE, CSPLINE, BAUTO, BNAT, BTAN, EAUTO, ENAT, ETAN, PW,
Расширенное программирование
250 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
̷͇͎͒͏͔͉͇͌͌͘͢͞
̩͉͇͌͌͘͘
̱͕͔͙͕͔͖͕͗͒ͣ͐͒͢͏͕͔͊
<
;