Руководство. Расширенное программирование, Справочник по программированию Sinumerik 840D (new)
Подождите немного. Документ загружается.

Трансформации
6.8 Кинематическая трансформация
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
381
С дополнительной линейной осью и с коррекцией стенки паза (тип трансформации
514):
Этот вариант трансформации использует дублирование на станке с дополнительной
линейной осью для осуществления улучшенной коррекции инструмента. В этом случае
для второй линейной оси действует:
• Уменьшенная рабочая зона и
• Вторая линейная ось не должна использоваться для старта программы обработки
детали.
Для программы обработки детали и согласования соответствующих осей в BKS или
MСS необходимы определенные установки машинных данных, см.
Литература
/FB2/ Описание функций "Расширенные функции"; Кинематическая трансформация
(М1)
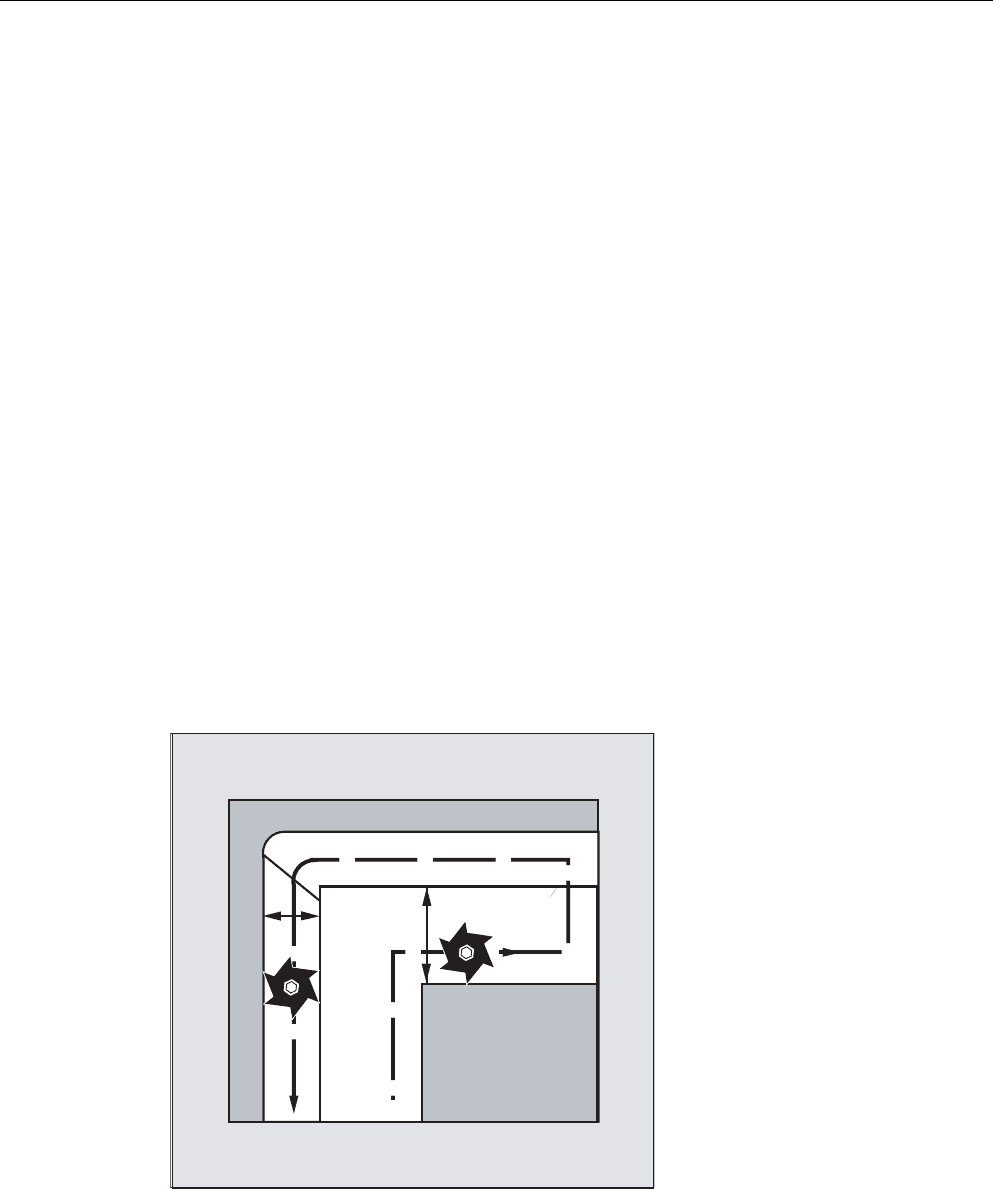
Смещение нормального контура OFFN (тип трансформации 513)
Для того, чтобы фрезеровать пазы с TRACYL , в
• программе обработки детали линия центров паза,
• через OFFN программируется половина ширины паза.
OFFN активируется только при выбранной коррекции радиуса инструмента, чтобы
избежать повреждения стенки паза). Кроме этого, необходимо условие OFFN>=радиус
инструмента, чтобы исключить повреждение противоположной стенки паза.
2))1
͎͇͖͕͇͓͗͊͗
͓͏͕͉͇͔͔͗͐͢
͕͔͙͚͑͗

Трансформации
6.8 Кинематическая трансформация
Расширенное программирование
382 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
Программа обработки детали для фрезерования паза, как правило, состоит из
следующих шагов:
1. Выбрать инструмент
2. Выбрать TRACYL
3. Выбрать подходящее смещение координат (FRAME)
4. Выполнить позиционирование
5. ЗапрограммироватьOFFN
6. Выбрать КРИ
7. Кадр подвода (ввод КРИ и подвод к стенке паза)
8. Контур линии центров паза
9. Отключить КРИ
10.Кадр отвода (вывод КРИ и отвод от стенки паза)
11.Выполнить позиционирование
12.TRAFOOF
13.Снова выбрать первоначальное смещение координат (FRAME)
Особенности
•Выбор КРИ:
КРИ программируется не относительно стенки паза, а относительно
запрограммированной линии центров паза. Для того, чтобы инструмент двигался
слева от стенки паза, вводится G42 (вместо G41). Этого можно избежать, если
ввести в OFFN ширину паза с отрицательным знаком.
• OFFN с TRACYL действует по иному, чем без TRACYL. Т.к. OFFN и без TRACYL
учитывается при активной КРИ, то после TRAFOOF необходимо снова установить
OFFN на ноль.
• Изменение OFFN внутри программы обработки детали возможно. Таким образом
можно сместить линию центров паза из центра (см. рис.).
• Направляющие пазы:
С TRACYL создается не такой же направляющий паз, который был бы изготовлен
инструментом, диаметр которого соответствует ширине паза. В принципе
невозможно изготовить с помощью цилиндрического инструмента меньшего
размера геометрию стенки паза, идентичную изготовленной с помощью
инструмента большего размера. TRACYL минимизирует ошибку. Во избежание
проблем с точностью, радиус инструмента должен быть лишь немного меньше
половины ширины паза.
Примечание
OFFN и КРИ
При TRAFO_TYPE_n = 512 значение в OFFN действует как припуск к КРИ.
При TRAFO_TYPE_n = 513 в OFFN программируется половина ширины паза. Обход
контура выполняется с OFFN-КРИ.
Трансформации
6.8 Кинематическая трансформация
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
383
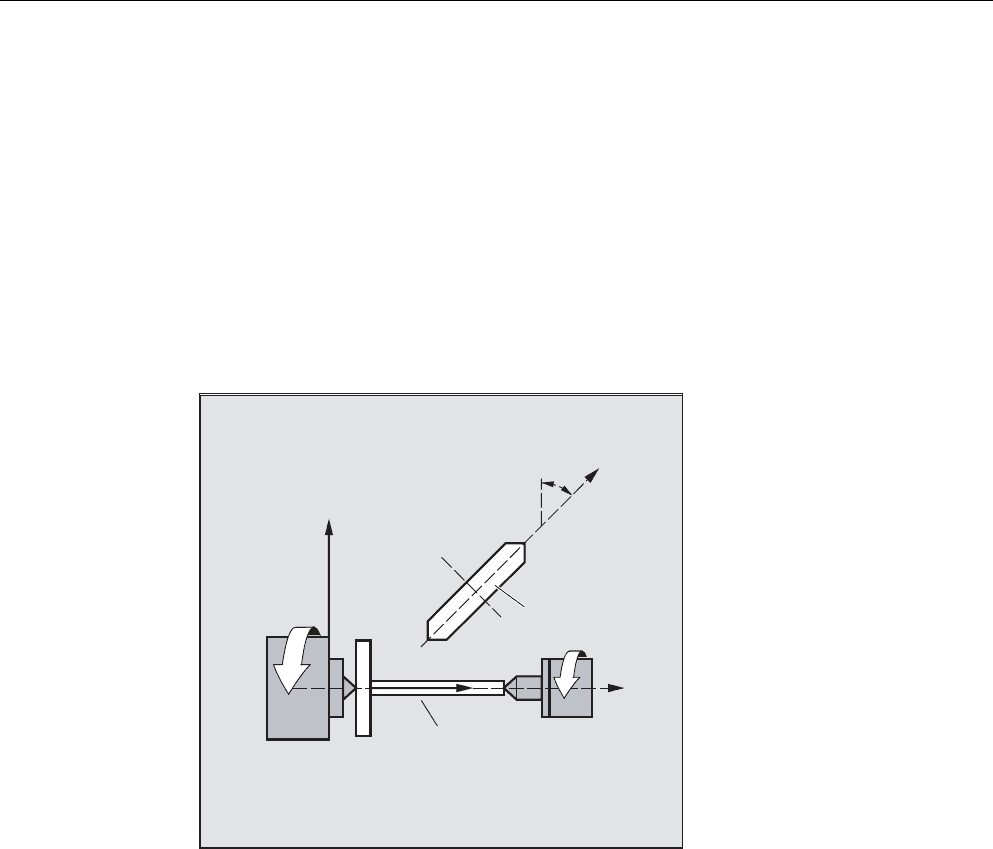
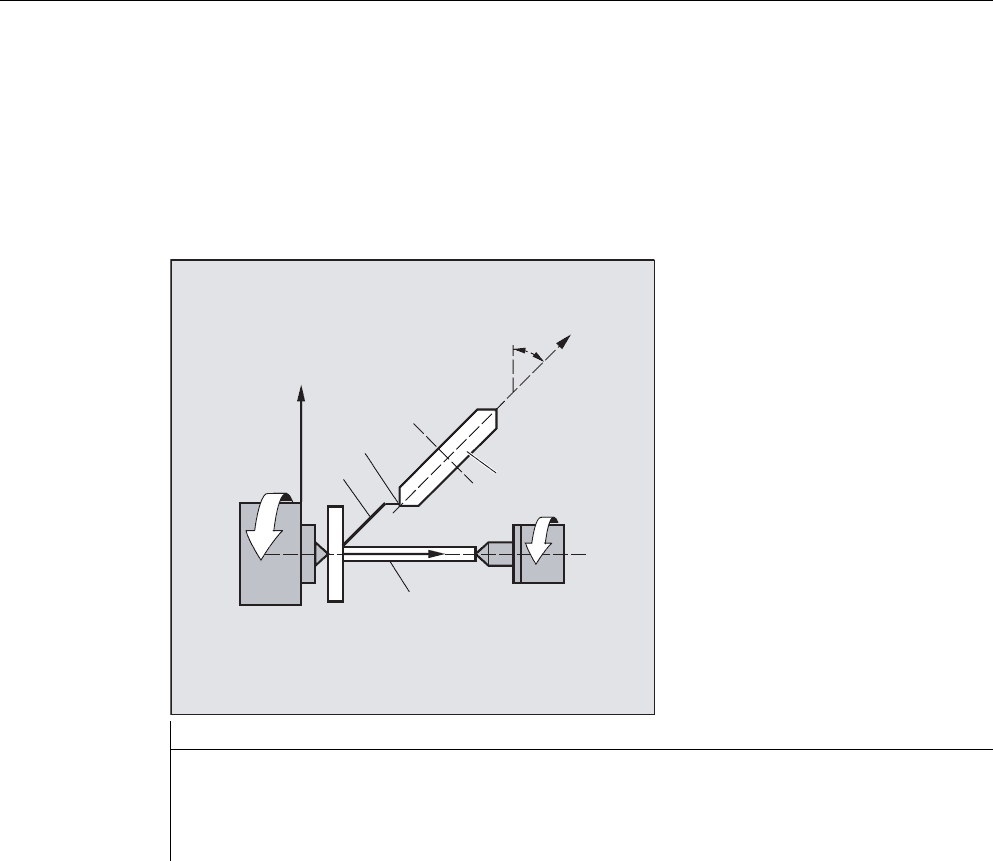
6.8.3 Наклонная ось (TRAANG)
Функция
Функция "Наклонная ось" предназначена для шлифовальной технологии и
обеспечивает:
• Обработка с наклонной осью подачи
• Для программирования можно использовать декартову систему координат.
• СЧПУ преобразует запрограммированные движения перемещения декартовой
системы координат в движения перемещения реальных осей станка (стандартный
случай): наклонная ось подачи.
Синтаксис
TRAANG(α) или TRAANG(α, n)
TRAFOOF
Значение
༾
;
=
&
0=
$6
08
̿͒͏͕͉͇͔͛͒ͣ͐͢
͚͑͗͊
̫͙͇͌͒ͣ
TRAANG( ) или
TRAANG( ,n)
Активировать трансформацию с параметрированием
предшествующего выбора.
TRAANG(α)
Активирует первую согласованную трансформацию "Наклонная ось"
TRAANG(α,n)
Активирует n-нную согласованную трансформацию "Наклонная ось".
n может быть макс. 2. TRAANG(α,1) соответствует TRAANG(α).
αA
Угол наклонной оси
Допустимыми значениями для α являются:
-90 градусов < α < + 90 градусов
Трансформации
6.8 Кинематическая трансформация
Расширенное программирование
384 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
Угол α опустить или ноль
Если угол α опускается (к примеру, TRAANG(), TRAANG(, n)), то трансформация
активируется с параметрированием предшествующего выбора. При первом выборе
действует предустановка согласно машинным данным.
Угол α = 0 (к примеру, TRAANG(0), TRAANG(0,n)) это действительное
параметрирование и более не соответствует опусканию параметра в более старых
версиях.
Пример
→ программируется в одном кадре.
TRAFOOF
Трансформация откл
n
Число согласованных трансформаций
Программный код Комментарий
N10 G0 G90 Z0 MU=10 G54 F5000 →
→ G18 G64 T1 D1
; Выбор инструмента, компенсация зажима
Выбор плоскости
N20 TRAANG(45) ; Включить трансформацию "Наклонная ось"
N30 G0 Z10 X5 ; Подвод к исходной позиции
N40 WAITP(Z) ; Разрешить оси для качания
N50 OSP[Z]=10 OSP2[Z]=5 OST1[Z]=–2 →
→ OST2[Z]=–2 FA[Z]=5000
N60 OS[Z]=1
N70 POS[X]=4.5 FA[X]=50
N80 OS[Z]=0
; Качание до достижения размера
(качание см. главу "Качание")
N90 WAITP(Z) ; Разрешить качающиеся оси как
позиционирующие
N100 TRAFOOF ; Отключить трансформацию
N110 G0 Z10 MU=10 ; Свободный ход
N120 M30 ;
༾
;
=
&
0=
$6
08
̿͒͏͕͉͇͔͛͒ͣ͐͢
͚͑͗͊
̫͙͇͌͒ͣ
Трансформации
6.8 Кинематическая трансформация
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
385
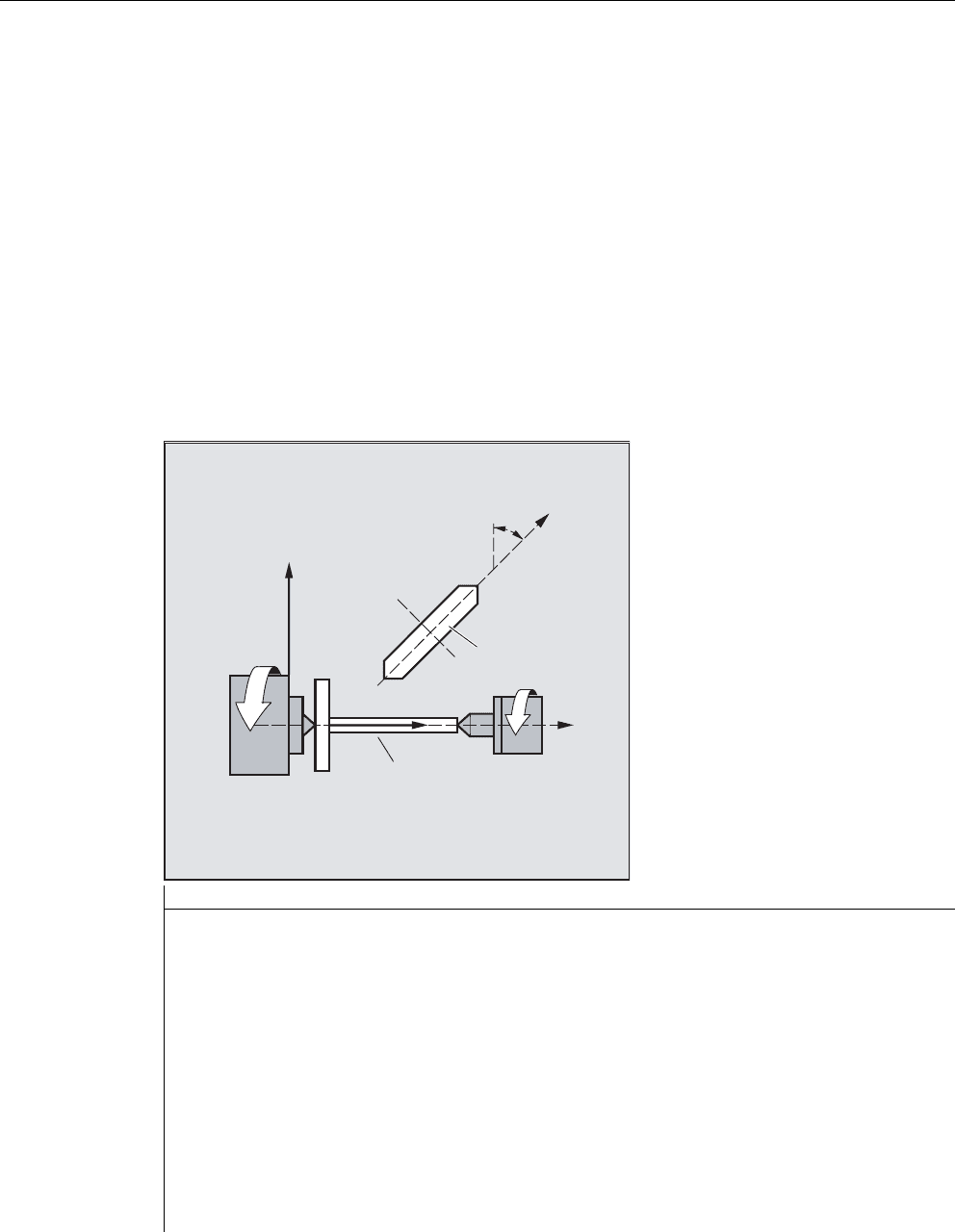
Описание
Возможны следующие обработки:
1. Продольное шлифование
2. Торцовое шлифование
3. Шлифование определенного контура
4. Шлифование с врезанием с угловой подачей
Изготовитель станка
Следующие установки определяются через машинные данные:
•Угол между осью станка и наклонной осью,
• Положение нулевой точки инструмента относительно начала координат
согласованной для функции "Наклонная ось" системы координат,
• Резерв скорости, подготовленный на параллельной оси для движения компенсации,
• Резерв ускорения оси, подготовленный на параллельной оси для движения
компенсации.

Трансформации
6.8 Кинематическая трансформация
Расширенное программирование
386 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
Конфигурация осей
Для возможности программирования в декартовой системе координат, необходимо
сообщить СЧПУ связь между этой системой координат и фактически существующими
осями станка (MU, MZ):
• Наименование гео-осей
• Согласование гео-осей с осями канала
- Общий случай (наклонная ось не активна)
- Наклонная ось активна
• Согласование осей канала с номерами осей станка
• Обозначение шпинделей
• Присвоение имен осей станка
Процесс, за исключением "Наклонная ось активна", соответствует процессу при
нормальной конфигурации осей.
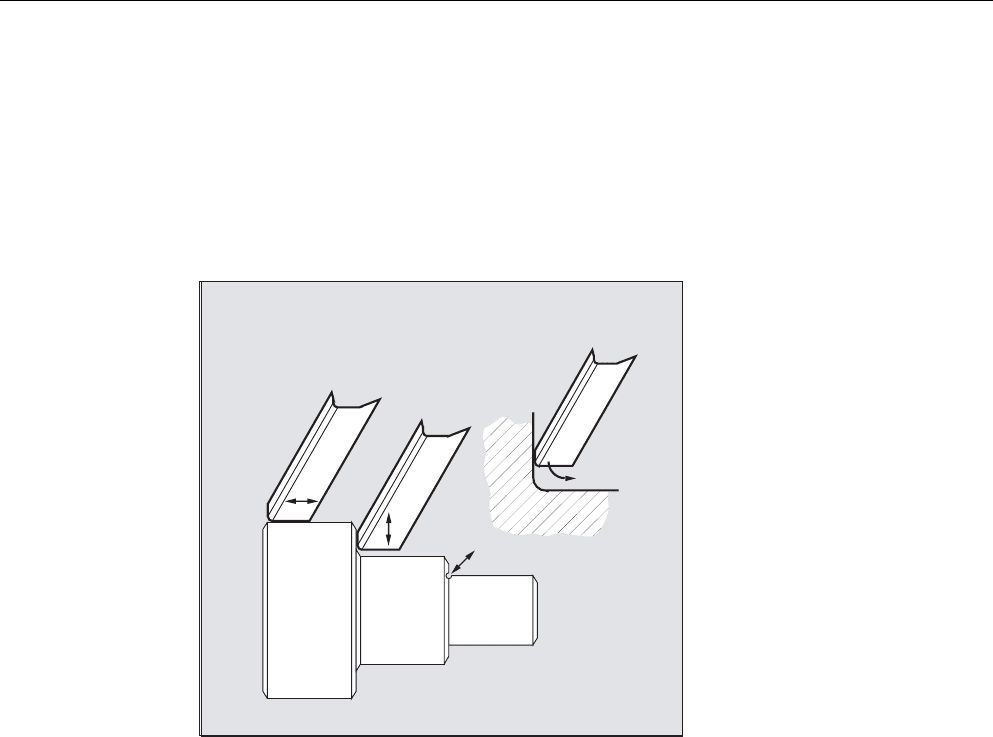
6.8.4 Программирование наклонной оси (G05, G07)
Функция
В режиме JOG возможно либо декартово движение шлифовального круга, либо
движение в направлении наклонной оси (индикация остается декартовой) по выбору.
Двигается только реальная ось U, индикация оси Z актуализируется.
Возврат смещений REPOS в режиме Jog должен выполняться декартово.
Выход за декартово ограничение рабочего поля в режиме JOG при активном
"Движении "от точки к точке"" контролируется, соответствующая ось заранее
затормаживается. Если "Движение "от точки к точке"" не активно, то ось может
двигаться точно до ограничения рабочего поля.
Литература
/FB2/ Описание функций "Расширенные функции"; Кинематическая трансформация
(М1)
Синтаксис
G07
G05
Команды G07/G05 служат для облегчения программирования наклонной оси. При
этом позиции могут программироваться и индицироваться в декартовой системе
координат. Коррекция инструмента и смещение нулевой точки учитываются декартово.
После программирования угла для наклонной оси в программе ЧПУ можно выполнить
подвод к стартовой позиции (G07) и после врезание с угловой подачей (G05).
Трансформации
6.8 Кинематическая трансформация
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
387
Значение
Пример
G07 Подвод к стартовой позиции
G05 Активирует врезание с угловой подачей
Программирование Комментарий
N.. G18 ; Запрограммировать угол для наклонной оси
N50 G07 X70 Z40 F4000 ; Подвод к стартовой позиции
N60 G05 X70 F100 ; Врезание с угловой подачей
N70 ... ;
1
1
;
=
&
$6
˞
8
̿͒͏͕͉͇͔͛͒ͣ͐͢
͚͑͗͊
̫͙͇͌͒ͣ
Трансформации
6.9 Движение “от точки к точке” в декартовой системе координат
Расширенное программирование
388 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
6.9 Движение “от точки к точке” в декартовой системе координат
Функция
С помощью этой функции можно запрограммировать позицию в декартовой системе
координат, но движение станка выполняется в координатах станка. Функция может
использоваться, к примеру, при смене положения шарнира, если при этом движение
проходит через сингулярность.
Синтаксис
N... TRAORI
N... STAT='B10' TU='B100' PTP
N... CP
Движение "от точки к точке" при базовой 5/6-осевой трансформации
Если при активной базовой 5/6-осевой трансформации с PTP активируется движение
"от точки к точке" в системе координат станка (ORIMKS) , то ориентация инструмента
может быть запрограммирована как с позициями круговых осей
N... G1 X Y Z A B C
так и с независимыми от кинематики векторами угла Эйлера или угла RPY
N... ORIEULER или ORIRPY
N... G1 X Y Z A2 B2 C2
или с векторами направления
N... G1 X Y Z A3 B3 C3
. При этом могут быть активными как интерполяция круговой оси, так и векторная
интерполяция с большой круговой интерполяцией ORIVECT или интерполяция вектора
ориентации на боковой поверхности конуса ORICONxx.
Многозначности ориентации с векторами
При программировании ориентации с векторами существует многозначность в
возможных позициях круговых осей. Позиции круговых осей, к которым выполняется
подвод, при этом могут быть выбраны через программирование STAT = <...>. Если
программируется STAT = 0 (это соответствует стандартной установке),
то выполняется подвод к позициям, лежащим ближе всего к стартовым позициям. Если
программируется STAT = 1,
то выполняется подвод к позициям, лежащим дальше от стартовых позиций.
Примечание
Функция имеет смысл только в комбинации с активной трансформацией. Кроме этого,
"Движение "от точки к точке"" допускается только в комбинации с G0 и G1.
Трансформации
6.9 Движение “от точки к точке” в декартовой системе координат
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
389
Значение
Команды PTP и CP действуют модально. CP это стандартная установка.
В то время, как программирование значения STAT действует модально,
программирование TU = <...> действует покадрово.
Следующим отличием является то, что программирование значения STAT сказывается
только при векторной интерполяции, в то время как программирование TU
обрабатывается и при активной интерполяции круговой оси.
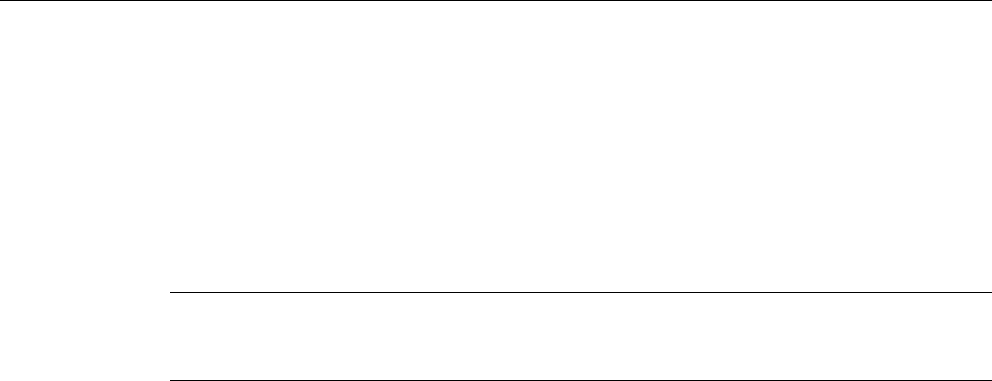
Пример
Изображение. 6-6
PTP
Point to Point (движение "от точки к точке")
Движение выполняется как движение синхронных осей; самая медленная из
участвующих в движении осей является доминирующей осью для скорости.
CP
continuous path (движение по траектории)
Движение выполняется как декартово движение по траектории.
STAT=
Положение шарниров; значение зависит от трансформации.
TU=
Информация TURN действует покадрово. Благодаря этому возможен
однозначный подвод к осевому углу между -360 градусов и +360 градусов.
N10 G0 X0 Y-30 Z60 A-30 F10000
Исходное положение
→ локоть сверху
N20 TRAORI(1)
Трансформация вкл
N30 X1000 Y0 Z400 A0
N40 X1000 Z500 A0 STAT='B10'
TU='B100' PTP
Переориентация без трансформации
→ локоть снизу
N50 X1200 Z400 CP
Трансформация снова активна
;
<
$
=
ൺ͕͕͙͔͒͑ͣ͘͏͎͚
ൺ͕͕͙͉͚͒͑ͣ͌͗͘͜

Трансформации
6.9 Движение “от точки к точке” в декартовой системе координат
Расширенное программирование
390 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
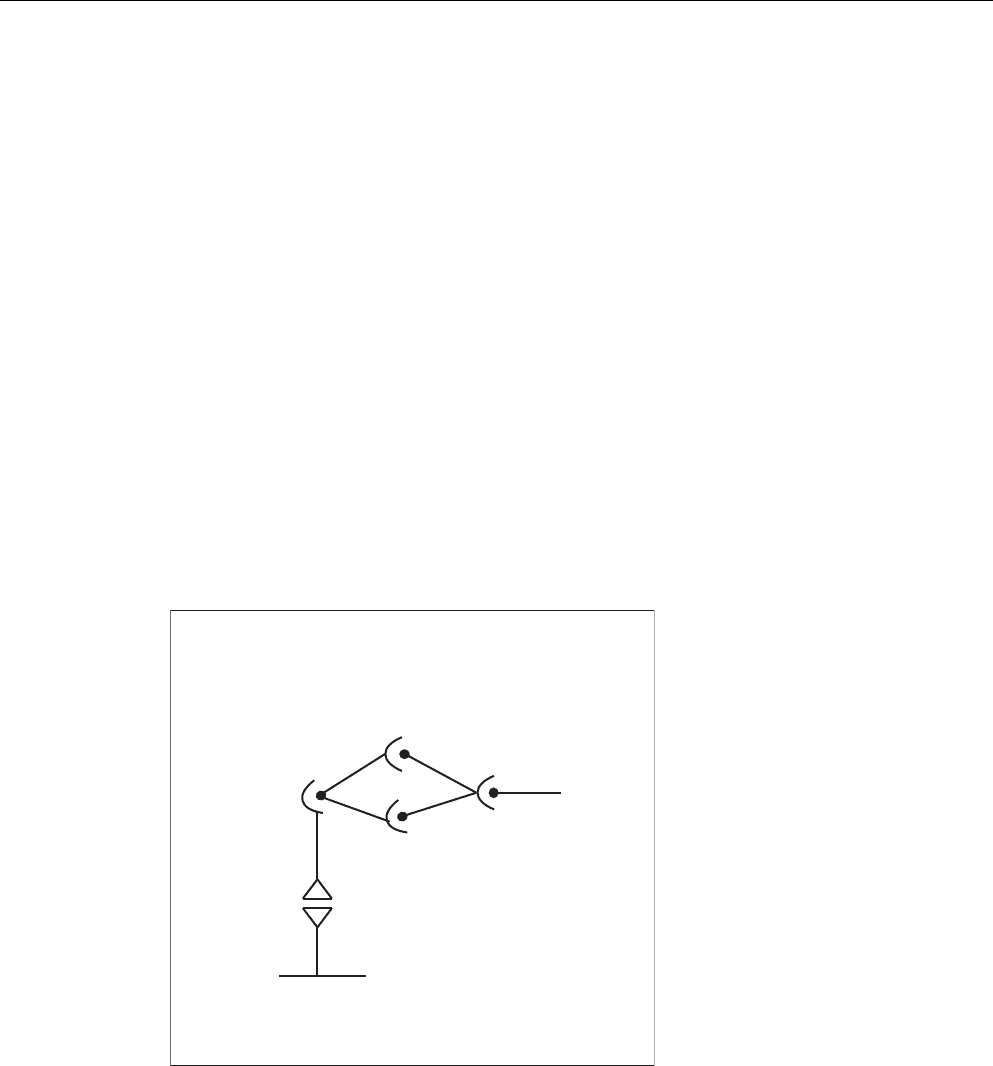
Пример движения "от точки к точке" при базовой 5-осевой трансформации
Допущение: основой является прямоугольная кинематика CA.
Выбрать однозначное положение подвода к позиции круговых осей:
При этом в кадре N40 круговые оси через программирование STAT = 1 двигаются по
более длинному пути от их стартовой точки (C=90, A=90) к конечной точке (C=270, A=–
45), в отличие от STAT = 0 . когда путь до конечной точки является самым коротким
(C=90, A=45).
Описание
Переключение между декартовым перемещением и перемещением осей станка
осуществляется через команды PTP и CP.
Движение "от точки к точке" при базовой 5/6-осевой трансформации
При движении "от точки к точке", в отличие от 5/6-осевой трансформации, TCP не
является фиксированной, если изменяется только ориентация. Выполняется линейный
подвод к преобразованным конечным позициям всех осей трансформации (3 линейные
оси и до 3 круговых осей), при этом трансформация в собственном смысле еще не
активна.
Отключение движения "от точки к точке" осуществляется через программирование
модального кода G CP.
Различные трансформации см. документацию:
/FB3/ Описание функций "Специальные функции"; Пакет трансформаций для
манипуляторов (TE4).
Программирование позиции (STAT=)
Позиция станка не определяется однозначно только через указание позиции с
декартовыми координатами и указание ориентации инструмента. В зависимости от
того, о какой кинематике идет речь, существует до 8 различных или различаемых
позиций шарниров. Тем самым они являются спец. для трансформаций. Для
однозначного пересчета декартовой позиции в осевой угол необходимо указать
позицию шарниров с помощью команды STAT= . Команда "STAT" в качестве двоичного
значения содержит для каждой из возможных позиций один бит.
N60 X1000 Z500 A20
N70 M30
Программный код Комментарий
TRAORI ; Трансформация кинематики CA вкл
PTP ; Включить движение "от точки к точке"
N10 A3 = 0 B3 = 0 C3 = 1 ; Позиции круговых осей C = 0 A = 0
N20 A3 = 1 B3 = 0 C3 = 1 ; Позиции круговых осей C = 90 A = 45
N30 A3 = 1 B3 = 0 C3 = 0 ; Позиции круговых осей C = 90 A = 90
N40 A3 = 1 B3 = 0 C3 = 1 STAT = 1 ; Позиции круговых осей C = 270 A = -45