Schneider P., Eberly D.H. Geometric Tools for Computer Graphics
Подождите немного. Документ загружается.

204 Chapter 6 Distance in 2D
// closest point is interior to the edge
returnc-b0*b0/a00; // F(b0 / a00, 0)
} else {
// minimize on the edge t0 + t1 = 1
floatn=a11-a01+b0-b1,d=a00-2*a01+a11;
if(n>0){
if(n<d){
// closest point is interior to the edge
return (a11-2*b1+c)-n*n/d; //F(n/d,1-n/d)
} else {
// closest point is end point (t0, t1) = (1, 0)
return a00-2*b0+c; //F(1, 0)
}
} else
// closest point is end point (t0, t1) = (0, 1)
return a11-2*b1+c; //F(0, 1)
}
}
} else {
// closest point is end point (t0, t1) = (0, 0)
return c; // F(0, 0)
}
Finally, the pseudocode for region 4 is
// Region 4. Minimize G(t0) = F(t0, 0) for t0 in [0, 1]. If t0 > 1, the
// parameter pair (min{1, t0}, 0) produces the closest point. If t0 = 0,
// then minimize H(t1) = F(0, t1) for t1 in [0, 1]. G’(t0)=0at
// t0 = b0 / a00. H’(t1)=0att1=b1/a11.
float c = Dot(Delta, Delta);
// minimize on edge t1 = 0
if (b0 < a00) {
if(b0>0){
// closest point is interior to edge
returnc-b0*b0/a00; // F(b0 / a00, 0)
} else {
// minimize on edge t0 = 0
if (b1 < a11) {
if(b1>0){
// closest point is interior to edge
returnc-b1*b1/a11; // F(0, b1 / a11)
6.3 Point to Polygon 205
} else {
// closest point is end point (t0, t1) = (0, 0)
return c; // F(0, 0)
}
} else {
// closest point is end point (t0, t1) = (0, 1)
return a11-2*b1+c; //F(0, 1)
}
}
} else {
// closest point is end point (t0, t1) = (1, 0)
return a00-2*b0+c; //F(1, 0)
}
Interior-to-Edge Search Time Analysis
The operation counts for the pseudocode are presented here to provide best-case
and worst-case performance of the code. We count additions A; multiplications M;
divisions D; comparisons of two floating-point numbers C
T
, neither known to be
zero; and comparisons of a floating-point number to zero C
Z
. The comparisons are
partitioned this way because floating-point libraries tend to support a test of the sign
bit of a number that is faster than a general floating-point comparison.
The block of code in
SquaredDistance that occurs before the set of conditional
statements, but including the sum in the first conditional, requires 15 additions
and 16 multiplications. Each region block incurs the cost of these operations. Table
6.1 shows the best-case and worst-case operation counts for the various regions. As
expected because of the design, the best case for region 0 requires the least amount
of time per point. The worst case for region 6 requires the most amount of time per
point.
Edge-to-Interior Search for a Closest Point
This method, proposed by Gino van den Bergen in a post to the newsgroup
comp.graphics.algorithms, is an attempted speedup by computing distance to edges
first and hoping that a common vertex for two edges is the closest point. The ar-
gument in that post is that intuitively this method should perform better than the
previous one when Y is far from the triangle. The basis is that if you were to select a
large bounding box for the triangle, and if the test points are uniformly distributed in
that box, the probability that a vertex is closest to a test point is much larger than the
probability that an edge point is closest to a test point or that the test point is interior
to the triangle. To motivate this, consider a triangle with vertices (0, 0), (1, 0), and
206 Chapter 6 Distance in 2D
Table 6.1 Operation counts for point-to-triangle distance calculation using the interior-to-
edge approach.
Region/count AMDC
T
C
Z
0, best 15 16 0 1 2
0, worst 15 16 0 1 2
1, best 23 20 0 1 3
1, worst 24 21 1 2 3
2, best 16 18 0 1 2
2, worst 24 21 1 3 3
3, best 16 18 0 1 3
3, worst 17 19 1 2 3
4, best 18 19 0 2 2
4, worst 17 19 1 3 4
5, best 16 18 0 1 3
5, worst 17 19 1 2 3
6, best 16 18 0 1 3
6, worst 24 21 1 3 4
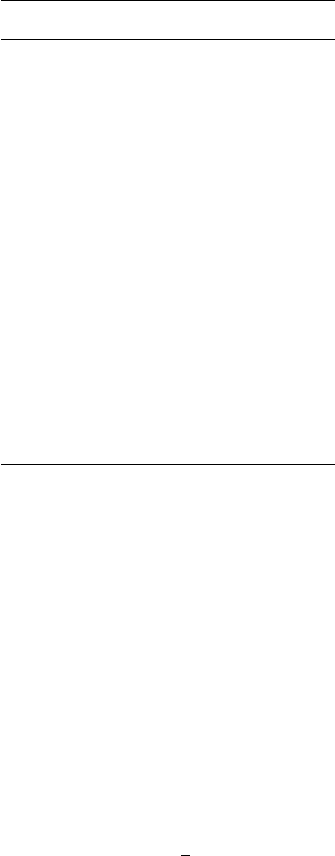
(0, 1) and a bounding box [−r, r]
2
,wherer ≥1. Figure 6.9 illustrates these and shows
the regions of points closest to vertices and to edges.
Regions V
0
, V
1
, and V
2
are the sets of points closest to (0, 0), (1, 0), and (0, 1),re-
spectively. Regions E
0
, E
1
, and E
2
are the sets of points closest to edges (0, 0), (1, 0),
(1, 0), (0, 1), and (0, 1), (0, 0), respectively. Region T is the triangle interior. The
area of T is A
T
= 1/2. The total area of the edge regions is A
E
= 4r − 3/2. The to-
tal area of the vertex regions is A
V
= 4r
2
− 4r + 1. Clearly A
V
>A
E
for sufficiently
large r since A
V
is quadratic in r, but A
E
is only linear in r. Therefore, for sufficiently
large r, a randomly selected point in the rectangle has the largest probability of being
in a vertex region. It makes sense in this case to have an algorithm that tests vertices
first for closeness to a test point.
However, now consider small r.Ifr =1, the only vertex region with positive area
is V
0
and has area A
V
= 1.TheedgeregionareaisA
E
= 5/2 >A
V
.IngeneralA
E
≥
A
V
for 1 ≤ r ≤ 1 +
√
6/4
.
=
1.612. For this range of r values, a randomly selected
point in the rectangle has the largest probability of being in an edge region. The
chances that the actual distribution of the test points in an application are uniformly
distributed in the sense mentioned above is small, so the method for measuring
distance from a point to a triangle is best determined by testing your own data with
these algorithms.
6.3 Point to Polygon 207
–r r
–r
r
0
0
1
1
V
1
V
0
E
2
E
1
V
2
E
0
T
Figure 6.9 A triangle, a bounding box of the triangle, and the regions of points closest to vertices
and to edges.
The pseudocode for the current algorithm is listed below. The code indicates that
the closest triangle point to the test point is returned. The distance to the test point
can be calculated from this.
float SquaredDistance (Point Y, Triangle T)
{
// triangle vertices V0, V1, V2, edges E0=<V0, V1>, E1=<V1, V2>, E2=<V2, V0>
// closest point on E0 to P is K0 = V0 + t0 * (V1 - V0) for some t0 in [0, 1]
float t0 = ParameterOfClosestEdgePoint(P, E0);
// closest point on E1 to P is K1 = V1 + t1 * (V2 - V1) for some t1 in [0, 1]
float t1 = ParameterOfClosestEdgePoint(P, E1);
if (t0 == 0 and t1 == 0) // closest point is vertex V1
return SquaredLength(Y - V1);
// closest point on E2 to P is K2 = V2 + t2 * (V0 - V2) for some t2 in [0, 1]
float t2 = ParameterOfClosestEdgePoint(P, E2);
if (t1 == 0 and t2 == 0) // closest point is vertex V2
return SquaredLength(Y - V2);
208 Chapter 6 Distance in 2D
if (t0 == 0 and t2 == 0) // closest point is vertex V0
return SquaredLength(Y - V0);
//Y=c0*V0+c1*V1+c2*V2forc0+c1+c2=1
GetBarycentricCoordinates(Y, V0, V1, V2, c0, c1, c2);
if (c0 < 0) // closest point is K1 on edge E1
return SquaredLength(Y - (V1 + t1 * (V2 - V1)));
if (c1 < 0) // closest point is K2 on edge E2
return SquaredLength(Y - (V2 + t2 * (V0 - V2)));
if (c2 < 0) // closest point is K0 on edge E0
return SquaredLength(Y - (V0 + t0 * (V1 - V0)));
return 0; // Y is inside triangle
}
The function ParameterOfClosestEdgePoint(P,E) effectively is what is used in
computing distance from a point to a line segment. The projection of P onto the
line containing the edge V
0
, V
1
is K =V
0
+t(V
1
−V
0
),wheret =(P −V
0
)/V
1
−
V
0
2
.Ift<0, it is clamped to t = 0 and the closest point to P is V
0
.Ift>1, it is
clamped to t =1 and the closest point is V
1
. Otherwise, t ∈[0, 1]and the closest point
is K. The aforementioned function returns the t value. If the function were to be
implemented as described, it involves a division by the squared length of the edge.
At least two calls are made to this function, so the distance calculator would require
a minimum of two divisions, an expensive proposition. A smarter implementation
does not do the division, but computes the numerator n and denominator d of t .If
n<0, t is clamped to 0. If n>d, t is clamped to 1. The numerators and denominators
should be stored as local variables at the scope of the function body for use later in the
barycentric coordinate calculations. If the function returns any of the three vertices,
the division n/d for any of the t-values is never performed.
The function
GetBarycentricCoordinates computes P =
2
i=0
c
i
V
i
,where
2
i=0
c
i
= 1. Once c
1
and c
2
are known, we can solve c
0
= 1 − c
1
− c
2
. The equa-
tion for P is equivalent to P − V
0
=c
1
(V
1
−V
0
) + c
2
(V
2
−V
0
). The vector equation
represents two linear equations in the two unknowns c
1
and c
2
, a system that can be
solved in the usual manner. The solution, if implemented in a straightforward man-
ner, requires a division by the determinant of the coefficient matrix. The division
is not necessary to perform. The barycentric calculator can return the coordinates
as three rational numbers c
i
= n
i
/d having the same denominator. The numerators
and denominator are returned in separate storage. The sign test c
0
< 0 is equivalent
to n
0
d<0, so the division is replaced by a multiplication. The conditional test is a
sign test, so the conventional floating-point comparison can be replaced by a (typi-
cally faster) test of the sign bit of the floating-point number. Even better would be to
6.3 Point to Polygon 209
avoid the multiplications n
i
d and have a conditional statement that tests the sign bit
of d. Each clause of the test has three conditionals testing the sign bits of n
i
.
If c
0
< 0, the closest point is on the edge E
1
and is K
1
= V
1
+ t
1
(V
2
− V
1
).The
actual value of t
1
is needed. If the division n
1
/d
1
is deferred by the call to Parame-
terOfClosestEdgePoint
, it must now be calculated in order to compute K
1
. Similar
arguments apply for the conditional statements for c
1
and c
2
.
More detailed pseudocode that uses the deferred division and avoids the division
in the barycentric calculator is listed below. The return statements are marked for
reference by the section on the time analysis of the pseudocode.
float SquaredDistance (Point Y, Triangle T)
{
// T has vertices V0, V1, V2
// t0 = n0/d0 = Dot(Y - V0, V1 - V0) / Dot(V1 - V0, V1 - V0)
Point D0=Y-V0,E0=V1-V0;
float n0 = Dot(D0, E0);
// t1 = n1/d1 = Dot(Y - V1, V2 - V1) / Dot(V2 - V1, V2 - V1)
Point D1=Y-V1, E1=V2-V1;
float n1 = Dot(D1, E1);
if (n0 <= 0 and n1 <= 0) // closest point is V1
return Dot(D1, D1); // RETURN 0
// t2 = n2/d2 = Dot(Y - V2, V0 - V2) / Dot(V0 - V2, V0 - V2);
Point D2=Y-V2, E2=V0-V2;
float n2 = Dot(D2, E2);
if (n1 <= 0 and n2 == 0) // closest point is V2
return Dot(D2, D2); // RETURN 1
if (n0 <= 0 and n2 <= 0) // closest point is V0
return Dot(D0, D0); // RETURN 2
//D0=Y-V0=V0+c1*(V1-V0)+c2*(V2-V0)=V0+c1
//*E1-c2*E2for
//c0+c1+c2=1,c0=m0/d,c1=m1/d,c2=m2/d
float e00 = Dot(E0, E0), e02 = Dot(E0, E2), e22 = Dot(E2, E2);
float d = e02 * e02 - e00 * e22;
float a = Dot(D0, E2);
float m1 = e02*a-e22*n0;
float m0, m2;
Point D;
210 Chapter 6 Distance in 2D
if(d>0){
if (m1 < 0) { // closest point is V2 + t2 * E2
t2 = n2 / e22;
D=Y-(V2+t2*E2);
return Dot(D, D); // RETURN 3a
}
m2=e00*a-e02*n0;
if (m2 < 0) { // closest point is V0 + t0 * E0
t0 = n0 / e00;
D=Y-(V0+t0*E0);
return Dot(D, D); // RETURN 4a
}
m0=d-m1-m2;
if (m0 < 0) { // closest point is V1 + t1 * E1
t1 = n1/Dot(E1, E1);
D=Y-(V1+t1*E1);
return Dot(D, D); // RETURN 5a
}
} else {
if (m1 > 0) { // closest point is V2 + t2 * E2
t2 = n2 / e22;
D=Y-(V2+t2*E2);
return Dot(D, D); // RETURN 3b
}
m2=e00*a-e02*n0;
if (m2 > 0) { // closest point is V0 + t0 * E0
t0 = n0 / e00;
D=Y-(V0+t0*E0);
return Dot(D, D); // RETURN 4b
}
m0=d-m1-m2;
if (m0 > 0) { // closest point is V1 + t1 * E1
t1 = n1 / Dot(E1, E1);
D=Y-(V1+t1*E1);
return Dot(D, D); // RETURN 5b
}
}
return 0; // Y is inside triangle, RETURN 6
}
6.3 Point to Polygon 211
Table 6.2
Operation counts for point-to-triangle distance calculation using the
edge-to-interior approach.
Return/count AMDC
Z
011602
1171004
2181206
3a, 3b 29 28 1 8
4a, 4b 30 30 1 9
5a, 5b 33 32 1 10
62726010
Edge-to-Interior Search Time Analysis
The operation counts for the pseudocode are presented here to provide best-case
and worst-case performance of the code. We count additions A, multiplications M,
divisions D, and comparisons of a floating-point number to zero C
Z
.Nogeneral
comparisons occur in this pseudocode, so C
T
as defined for the previous algorithm
is always zero. Table 6.2 shows the operation counts for each of the return statements
in the pseudocode. The worst case is assumed for the pair of conditions for the first
three return blocks; that is, both sign tests occur with the second one false so that the
return is skipped. The best case is that the condition fails because the first sign test in
each condition is false and the return is skipped. The best case is when the function
terminates at the very first return statement marked
RETURN 0. The worst case occurs
at the return statements marked
RETURN 5a and RETURN 5b.
Comparing this to the results of the other algorithm whose operation counts are
summarized in Table 6.1, we see that the best case for the edge-to-interior algorithm
(11A,6M,0D,2C
Z
) is faster than the best case for the interior-to-edge algorithm
(15A,16M,0D,1C
T
,2C
Z
). However, the worst case for the edge-to-interior algo-
rithm (33A,32M,1D,10C
Z
) is slower than the worst case for the interior-to-edge
algorithm (24A,21M,1D,3C
T
,4C
Z
). To decide which algorithm is the best one for
your application will require either some type of amortized analysis or actual experi-
ments that compute the execution time.
6.3.2 Point to Rectangle
Calculating the distance between a point and a rectangle is less complicated than
that between a point and a triangle. The fact that the polygon has all right angles
greatly simplifies the problem. Within the coordinate system whose axes are aligned
212 Chapter 6 Distance in 2D
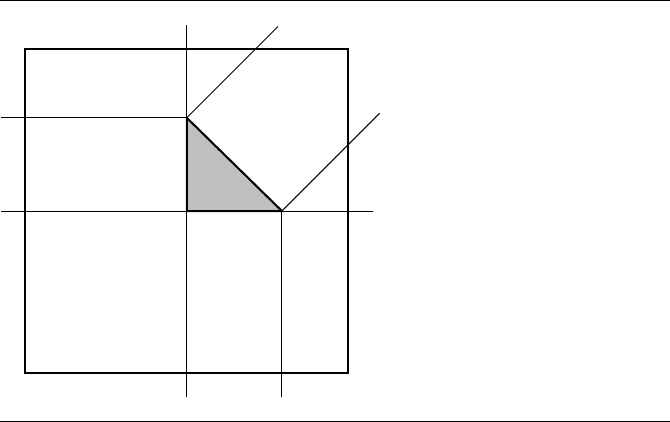
MP PPZP
ZM PMMM
MZ ZZ PZ
t
0
t
1
Figure 6.10 Partitioning of the plane by a rectangle.
with the rectangle sides, the problem decomposes into distance calculations in each
dimension.
Let the test point be Y . The symmetric form for the rectangle is X(t
0
, t
1
) =
C +t
0
ˆu
0
+t
1
ˆu
1
for |t
0
|≤e
0
and |t
1
|≤e
1
. The vectors ˆu
i
are unit length, and C is the
center of the rectangle. This form is used to avoid any divisions at all. The test point
can be transformed to Y =C +s
0
ˆu
0
+s
1
ˆu
1
. Setting
= Y − C,wehaves
0
=ˆu
0
·
and s
1
=ˆu
1
·
. The closest point on the rectangle to Y depends on which of the nine
regions contains (s
0
, s
1
) in the (t
0
, t
1
) parameter plane. Figure 6.10 illustrates these
regions. If (s
0
, s
1
) is in region ZZ, then Y is inside the rectangle and the distance is
zero. If (s
0
, s
1
) is in one of regions PZ, ZP, MZ,orZM, then the closest point is the
projection onto the corresponding edge of the rectangle. Otherwise (s
0
, s
1
) is in one
of regions PP, PM, MP,orMM. The closest point is the corresponding vertex of the
rectangle.
The skeleton of the pseudocode could be set up to have nested conditional state-
ments, each clause corresponding to one of the nine regions in the partition of the
parameter plane. However, this is not necessary because of the orthogonality of the
rectangle edges. The skeleton is set up to handle each dimension separately.
float SquaredDistance(Point Y, Rectangle R)
{
Point Delta=Y-R.C;
float s0 = Dot(R.U0, Delta), s1 = Dot(R.U1, Delta), sqrDist = 0;
float s0pe0 = s0 + R.e0;
if (s0pe0 < 0) {
sqrDist += s0pe0 * s0pe0;
6.3 Point to Polygon 213
} else {
float s0me0 = s0 - R.e0;
if (s0me0 > 0)
sqrDist += s0me0 * s0me0;
}
float s1pe1 = s1 + R.e1;
if (s1pe1 < 0) {
sqrDist += s1pe1 * s1pe1;
} else {
float s1me1 = s1 - R.e1;
if (s1me1 > 0)
sqrDist += s1me1 * s1me1;
}
return sqrDist;
}
6.3.3 Point to Orthogonal Frustum
A single cone is defined as the set of points whose boundary consists of two rays with
a common origin, called the vertex of the cone. Let the vertex be denoted V . Let the
rays have unit-length directions
ˆ
d
0
and
ˆ
d
1
.Theaxis of the cone is the bisector ray. Let
ˆa be the unit-length direction of the axis. The angle of the cone is the angle θ ∈ (0, π)
between ˆa and either ray direction vector. In this section we restrict our attention to
cones for which θ<π/2. Figure 6.11(a) shows a single cone.
If two parallel lines are specified that transversely intersect the cone, the convex
quadrilateral that is bounded by the cone and the lines is called a frustum of the cone.
Figure 6.11(b) shows such a frustum. If the lines are perpendicular to the cone axis,
the frustum is said to be an orthogonal frustum. Figure 6.11(c) shows an orthogonal
frustum.
A point X is inside a cone if the angle between X −V and ˆa is smaller than θ.We
can write this constraint in terms of dot products as ˆa · (X −V)≥ cos(θ). A frustum
has additional constraints. If the parallel line closest to the vertex contains the point
P and has a unit-length normal ˆn that points inside the frustum, the line equation
is ˆn · (X −P)= 0. The other line contains a point P + s ˆn for some s>0. The line
equation is ˆn · (X − P)= s. The extra constraints for X to be inside the frustum are
0 ≤ˆn · (X −P)≤ s. If the frustum is orthogonal, ˆn =ˆa.
An orthogonal frustum in two dimensions is the analog of the view frustum that is
used in three dimensions when the camera model is based on perspective projection.
In two dimensions, V plays the role of the eye point, the two parallel lines play the
role of the near and far planes, and the two bounding rays play the role of the left and
right extents of the view frustum. This section provides an algorithm for computing