Schneider P., Eberly D.H. Geometric Tools for Computer Graphics
Подождите немного. Документ загружается.


234 Chapter 6 Distance in 2D
become known as the GJK algorithm, where the acronym is just the initial letters of
the last names of the authors of the paper. The algorithm was later extended to handle
convex objects in general (Gilbert and Foo 1990). An enhancement of the algorithm
was also developed that computes penetration distances when the polyhedra are
intersecting (Cameron 1997).
6.10.1 Set Operations
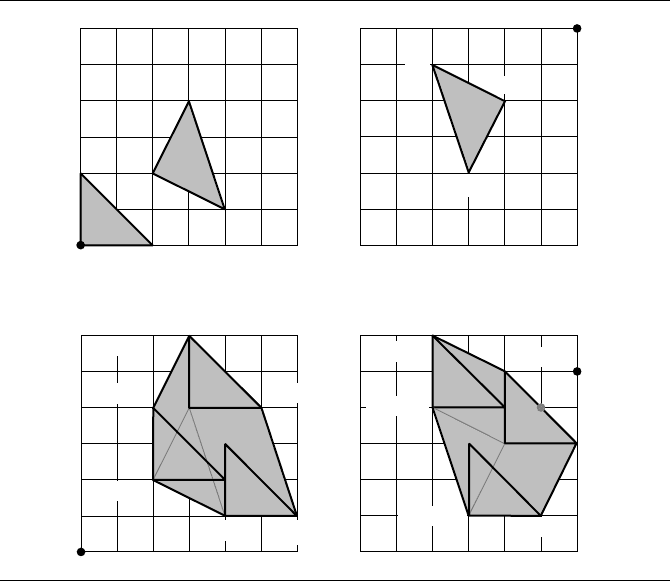
The Minkowski sum of two sets A and B is defined as the set of all sums of vector
pairs, one from each set. Formally, the set is A + B ={X +Y : X ∈ A, Y ∈B}.The
negation ofasetB is −B ={−X : X ∈ B}.TheMinkowski difference of the sets is
A − B ={X −Y : X ∈ A, Y ∈ B}. Observe that A − B = A + (−B). If the sets A
and B are both convex, then A + B, −B, and A − B are all convex sets. If A is a
convex polygon with n vertices and B is a convex polygon with m vertices, in the
worst case the sum A + B has n + m vertices. Figure 6.24 illustrates where A is
the triangle U
0
, U
1
, U
2
=(0, 0), (2, 0), (0, 2) and B is the triangle V
0
, V
1
, V
2
=
(2, 2), (4, 1), (3, 4). The origin (0, 0) is marked as a black dot.
Figure 6.24(a) shows the original triangles. Figure 6.24(b) shows −B. Figure
6.24(c) shows A + B. To provide some geometric intuition on the sum, the figure
shows three triangles, with black edges corresponding to triangle A translated by each
of the three vertices of triangle B. Triangle B itself is shown with gray edges. Imagine
painting the hexagon interior by the translated triangle A where you move U
0
+ V
0
within triangle B. The same geometric intuition is illustrated in the drawing of A −B
(Figure 6.24(d)).
The distance between any two sets A and B is formally
Distance(A, B) = min{X − Y : X ∈ A, Y ∈ B}=min{Z: Z ∈A − B}
The latter equation shows that the Minkowski difference can play an important role
in distance calculations. The minimum distance is attained by a point in A − B that
is closest to the origin. Figure 6.24(d) illustrates this for two triangles. The closest
point to the origin is the dark gray dot at the point (−1, −1) ∈ A − B. That point is
generated by (1, 1) ∈ A and (2, 2) ∈ B, so the distance between A and B is
√
2 and is
attained by the aforementioned points.
The heart of the distance calculation is how to efficiently search A − B for the
closest point to the origin. A straightforward algorithm is to compute A −B directly,
then iterate over the edges and compute the distance from each edge to the origin. The
minimum such distance is the distance between A and B. However, this approach is
not efficient in that it can take significant time to compute A − B as the convex hull
of the set of points U − V ,whereU isavertexofA and V isavertexofB.Moreover,
an exhaustive search of the edges will process edges that are not even visible to the
origin. The approach is O(nm) where A has n vertices and B has m vertices since the
convex hull can have nm vertices. The GJK algorithm is an iterative method designed
6.10 GJK Algorithm 235
U
2
U
1
U
0
V
0
V
2
V
1
A
B
U
2
– V
1
U
2
– V
0
U
0
– V
1
U
0
– V
2
U
1
– V
2
U
1
– V
0
A – B
–V
2
–V
0
–V
1
U
2
+ V
2
U
2
+ V
0
U
0
+ V
0
U
1
+ V
2
A + B
(a) (b)
(c) (d)
–B
U
0
+ V
1
U
1
+ V
1
Figure 6.24 (a) Triangles A and B; (b) set −B; (c) set A +B; (d) set A −B, where the gray point
is the closest point in A − B to the origin. The black dots are the origin (0, 0).
to avoid the direct convex hull calculation and to localize the search to edges near the
origin.
6.10.2 Overview of the Algorithm
The discussion here is for the general n-dimensional problem for convex objects A
and B.LetC = A − B,whereA and B are convex sets. As noted earlier, C itself is a
convex set. If 0 ∈ C, then the original sets intersect and the distance between them is
zero. Otherwise, let Z ∈C be the closest point to the origin. It is geometrically clear
that only one such point exists and must lie on the boundary of C. However, there
can be many X ∈ A and Y ∈ B such that X −Y =Z. For example, this happens for
two disjoint convex polygons in 2D whose closest features are a pair of parallel edges,
onefromeachpolygon.
236 Chapter 6 Distance in 2D
The GJK algorithm is effectively a descent method that constructs a sequence of
points on the boundary of C, each point having smaller distance to the origin than
the previous point in the sequence. In fact, the algorithm generates a sequence of
simplices with vertices in C (triangles in 2D, tetrahedra in 3D), each simplex having
smaller distance to the origin than the previous simplex. Let S
k
denote the simplex
vertices at the kth step, and let
¯
S
k
denote the simplex itself. The point V
k
∈
¯
S
k
is
selected to be the closest point in
¯
S
k
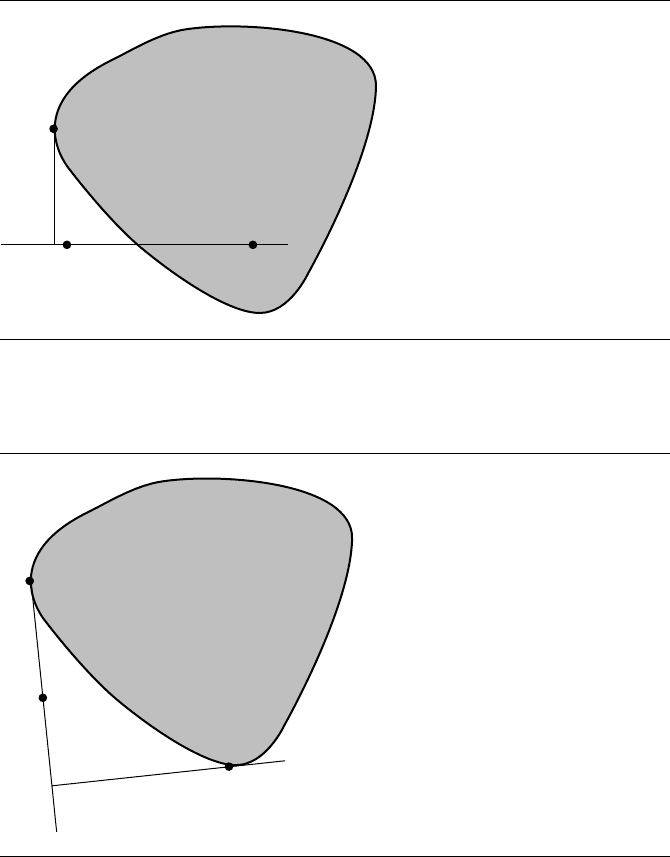
to the origin. Initially, S
0
=∅(the empty set)
and V
0
is an arbitrary point in C. The set C is projected onto the line through 0 with
direction V
0
, the resulting projection being a closed and bounded interval on the line.
The interval end point that is farthest left on the projection line is generated by a point
W
0
∈C. The next set of simplex vertices is S
1
={W
0
}. Figure 6.25 illustrates this step.
Since S
1
is a singleton point set,
¯
S
1
= S
1
and V
1
= W
0
is the closest point in
¯
S
1
to the origin. The set C is now projected onto the line containing 0 with direction
V
1
. The interval end point that is farthest left on the projection line is generated by a
point W
1
∈C. The next set of simplex vertices is S
2
={W
0
, W
1
}. Figure 6.26 illustrates
this step.
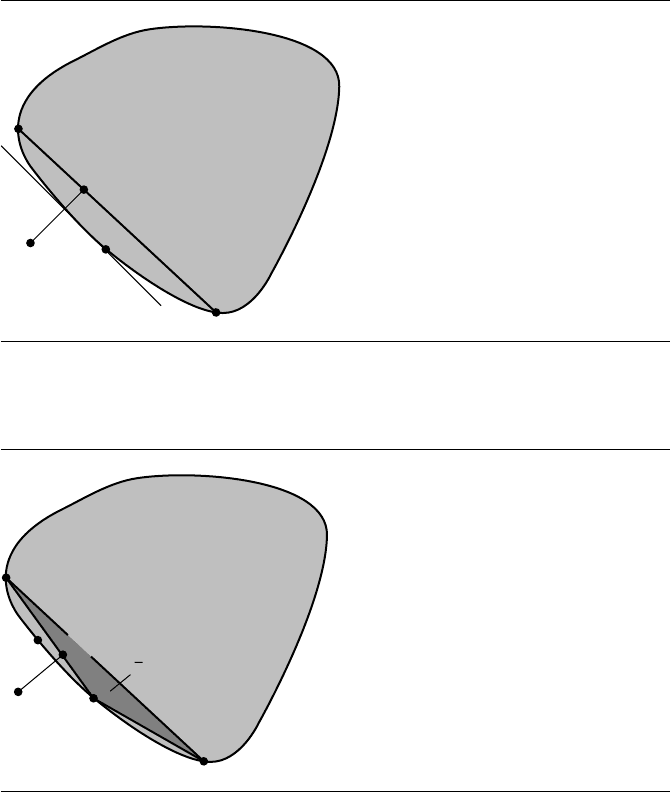
The set
¯
S
2
is the line segment W
0
, W
1
. The closest point in
¯
S
2
to the origin is
an edge-interior point V
2
. The set C is projected onto the line containing 0 with
direction V
2
. The interval end point that is farthest left on the projection line is
generatedbyapointW
2
∈ C. The next set of simplex vertices is S
3
={W
0
, W
1
, W
2
}.
Figure 6.27 illustrates this step.
The set
¯
S
3
is the triangle W
0
, W
1
, W
2
. The closest point in
¯
S
3
to the origin is
a point V
3
on the edge W
0
, W
2
. The next simplex vertex that is generated is W
3
.
The next set of simplex vertices is S
4
=W
0
, W
2
, W
3
. The old simplex vertex W
1
is
discarded. Figure 6.28 illustrates this step. The simplex
¯
S
3
is shown in dark gray.
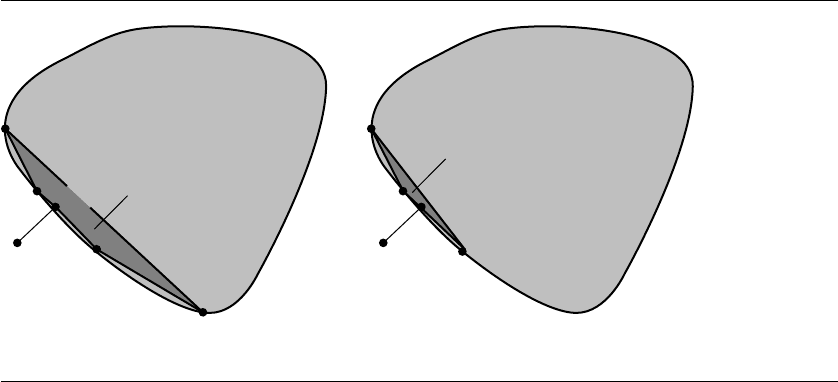
Generally, V
k+1
is chosen to be the closest point to the origin in the convex hull
of S
k
∪{W
k
}. The next set of simplex vertices S
k+1
is chosen to be set M ⊆ S
k
∪{W
k
}
with the fewest number of elements such that V
k+1
is in the convex hull of M. Such
asetM must exist and is unique. Figure 6.29(a) shows the convex hull of S
3
∪{W
3
},
a quadrilateral. The next iterate V
4
is shown on that hull. Figure 6.29(b) shows the
simplex
¯
S
4
that was generated by M ={W
0
, W
2
, W
3
}.
We state without proof that the sequence of iterates is monotonically decreasing
in length, V
k+1
≤V
k
. In fact, equality can only occur if V
k
=Z, the closest point.
For convex faceted objects, the closest point is reached in a finite number of steps. For
general convex objects, the sequence can be infinite, but must converge to Z.Ifthe
GJK algorithm is implemented for such objects, some type of termination criterion
must be used. Numerical issues also arise when the algorithm is implemented in a
floating-point number system. A discussion of the pitfalls is given by van den Bergen
(1997, 1999, 2001a), and the ideas are implemented in a 3D collision detection
system called SOLID (Software Library for Interference Detection) (van den Bergen
2001b). The main concern is that the simplices eventually become flat in one or more
dimensions.
6.10 GJK Algorithm 237
C
W
0
V
0
0
Figure 6.25 The first iteration in the GJK algorithm.
C
W
0
W
1
V
1
0
Figure 6.26
The second iteration in the GJK algorithm.
238 Chapter 6 Distance in 2D
C
W
0
W
2
W
1
V
2
0
Figure 6.27 The third iteration in the GJK algorithm.
C
W
0
W
2
W
3
W
1
V
3
S
3
0
Figure 6.28 The fourth iteration in the GJK algorithm.
6.10.3 Alternatives to GJK
The GJK algorithm is by no means the only algorithm for computing distance be-
tween convex polygons or convex polyhedra, but good, robust implementations are
publicly available (van den Bergen 2001b). The distance between two nonintersecting
convex polygons can be computed using the method of rotating calipers (Pirzadeh
1999). This powerful method is useful for solving many other types of problems in
6.10 GJK Algorithm 239
CC
W
0
W
0
W
2
W
2
W
3
W
3
W
1
V
4
00
hull (S
3
{W
3
})
S
4
⊃
(a) (b)
Figure 6.29 (a) Construction of V
k+1
in the convex hull of S
k
∪{W
k
}. (b) The new simplex
¯
S
k+1
generated from M ={W
0
, W
2
, W
3
}.
computational geometry. Assuming both polyhedra have O(n) vertices, an O(n
2
) al-
gorithm, both in space and in time, for computing the distance is given by Cameron
and Culley (1986). An asymptotically better algorithm is given by Dobkin and Kirk-
patrick (1990) and is O(n) in space and O(log
2
n) in time. However, no imple-
mentation appears to be publicly available. The method is based on constructing a
hierarchical representation of a polyhedron that is useful for solving other queries,
for example, in rapid determination of an extreme point of a polyhedron for a speci-
fied direction. In more recent times, the Lin-Canny algorithm (Lin and Canny 1991)
is O(n) in space, empirically O(n) in time, but maintains the closest pair of features
to exploit frame coherence. After computing the distance in one frame, the polyhedra
move slightly, and the distance must be recalculated in the next frame. The incre-
mental update is O(1) in time. Implementations based on this method are I-Collide
(Cohen et al. 1995) and V-Clip (Mirtich 1997).
Chapter
7Intersection in 2D
This chapter contains information on computing the intersection of geometric prim-
itives in 2D. The simplest object combinations to analyze are those for which one of
the objects is a linear component (line, ray, segment). These combinations are cov-
ered in the first four sections. Section 7.5 covers the intersection of a pair of quadratic
curves; Section 7.6 covers the problem of intersection of a pair of polynomial curves.
The last section is about the method of separating axes, a very powerful technique for
dealing with intersections of convex objects.
7.1 Linear Components
Recall from Chapter 5 the definitions for lines, rays, and segments. A line in 2D is
parameterized as P + t
d,where
d is a nonzero vector and where t ∈ R.Aray is
parameterized the same way except that t ∈ [0, ∞). The point P is the origin of the
ray. A segment is also parameterized the same way except that t ∈[0, 1]. The points P
and P +
d are the end points of the segment. A linear component is the general term
for a line, a ray, or a segment.
Given two lines P
0
+ s
d
0
and P
1
+ t
d
1
for s, t ∈ R, they are either intersect-
ing, nonintersecting and parallel, or the same line. To help determine which of
these cases occurs, define for two input 2D vectors the scalar-valued operation
Kross((x
0
, y
0
), (x
1
, y
1
)) = x
0
y
1
− x
1
y
0
. The operation is related to the cross product
in 3D given by (x
0
, y
0
,0) ×(x
1
, y
1
,0) =(0, 0, Kross((x
0
, y
0
), (x
1
, y
1
))). The operation
has the property that Kross(u, v) =−Kross(v, u).
A point of intersection, if any, can be found by solving the two equations in
two unknowns implied by setting P
0
+ s
d
0
= P
1
+ t
d
1
. Rearranging terms yields
s
d
0
− t
d
1
= P
1
− P
0
. Setting
= P
1
− P
0
and applying the Kross operation yields
241

242 Chapter 7 Intersection in 2D
Kross(
d
0
,
d
1
)s= Kross(
,
d
1
) and Kross(
d
0
,
d
1
)t = Kross(
,
d
0
). If Kross(
d
0
,
d
1
)
= 0, then the lines intersect in a single point determined by s = Kross(
,
d
1
)/
Kross(
d
0
,
d
1
) or t = Kross(
,
d
0
)/Kross(
d
0
,
d
1
).IfKross(
d
0
,
d
1
) = 0, then the lines
are either nonintersecting and parallel or the same line. If the Kross operation of the
direction vectors is zero, then the previous equations in s and t reduce to a single
equation Kross(
,
d
0
) = 0 since
d
1
is a scalar multiple of
d
0
. The lines are the same if
this equation is true; otherwise, the lines are nonintersecting and parallel.
If using floating-point arithmetic, distinguishing the nonparallel from the parallel
case can be tricky when Kross(
d
0
,
d
1
) is nearly zero. Using the relationship of Kross
to the 3D cross product, a standard identity for the cross product in terms of Kross
is Kross(
d
0
,
d
1
)=
d
0
d
1
| sin θ |,whereθ is the angle between
d
0
and
d
1
.For
the right-hand side of the last equation to be nearly zero, one or more of its three
terms must be nearly zero. A test for parallelism using an absolute error comparison
Kross(
d
0
,
d
1
)≤ε for some small tolerance ε>0 may not be suitable for some
applications. For example, two perpendicular direction vectors that have very small
length can cause the test to report that the lines are parallel when in fact they are
perpendicular. If possible, the application should require that the line directions be
unit-length vectors. The absolute error test then becomes a test on the sine of the
angle between the directions: Kross(
d
0
,
d
1
)=|sin θ|≤ε. For small enough angles,
the test is effectively a threshold on the angle itself since sin θ
.
=
θ for small angles. If
the application cannot require that the line directions be unit length, then the test for
parallelism should be based on relative error:
Kross(
d
0
,
d
1
)
d
0
d
1
=|sin θ|≤ε
The square root calculations for the two lengths and the division can be avoided by
using instead the equivalent inequality
Kross(
d
0
,
d
1
)
2
≤ ε
2
d
0
2
d
1
2
If the two linear components are a line (s ∈ R)andaray(t ≥ 0), the point of
intersection, if it exists, is determined by solving for s and t as shown previously.
However, it must be verified that t ≥ 0. If t<0, the first line intersects the line
containing the ray, but not at a ray point. Computing the solution t as specified earlier
involves a division. An implementation can avoid the cost of the division when testing
t ≥ 0 by observing that t = Kross(
,
d
0
)Kross(
d
0
,
d
1
)/(Kross(
d
0
,
d
1
))
2
and using the
equivalent test Kross(
,
d
0
)Kross(
d
0
,
d
1
) ≥ 0. If in fact the equivalent test shows that
t ≥ 0 and if the application needs to know the corresponding point of intersection,
only then should t be directly computed, thus deferring a division until it is needed.
Similar tests on s and t may be applied when either linear component is a ray or a
segment.
7.1 Linear Components 243
Finally, if the two linear components are on the same line, the linear com-
ponents intersect in a t-interval, possibly empty, bounded, semi-infinite, or infi-
nite. Computing the interval of intersection is somewhat tedious, but not com-
plicated. As an example, consider the case when both linear components are line
segments, so s ∈ [0, 1] and t ∈ [0, 1]. We need to compute the s-interval of the sec-
ond line segment that corresponds to the t-interval [0, 1]. The first end point is
represented as P
1
= P
0
+ s
0
d
0
; the second is represented as P
1
+
d
1
= P
0
+ s
1
d
0
.
If
= P
1
− P
0
, then s
0
=
d
0
·
/
d
0
2
and s
1
= s
0
+
d
0
·
d
1
/
d
0
2
.Thes-interval
is [s
min
, s
max
] = [min(s
0
, s
1
), max(s
0
, s
1
)]. The parameter interval of intersection is
[0, 1] ∩[s
min
, s
max
], possibly the empty set. The 2D points of intersection for the line
segment of intersection can be computed from the interval of intersection by using
the interval end points in the representation P
0
+ s
d
0
.
The pseudocode for the intersection of two lines is presented below. The return
value of the function is 0 if there is no intersection, 1 if there is a unique intersection,
and 2 if the two lines are the same line. The returned point
I is valid only when the
function returns 1.
int FindIntersection(Point P0, Point D0, Point P1, Point D1, Point& I)
{
// Use a relative error test to test for parallelism. This effectively
// is a threshold on the angle between D0 and D1. The threshold
// parameter ’sqrEpsilon’ can be defined in this function or be
// available globally.
PointE=P1-P0;
float kross = D0.x * D1.y - D0.y * D1.x;
float sqrKross = kross * kross;
float sqrLen0 = D0.x * D0.x + D0.y * D0.y;
float sqrLen1 = D1.x * D1.x + D1.y * D1.y;
if (sqrKross > sqrEpsilon * sqrLen0 * sqrLen1) {
// lines are not parallel
float s = (E.x * D1.y - E.y *D1.x) / kross;
I=P0+s*D0;
return 1;
}
// lines are parallel
float sqrLenE = E.x * E.x + E.y * E.y;
kross = E.x * D0.y - E.y * D0.x;
sqrKross = kross * kross;
if (sqrKross > sqrEpsilon * sqrLen0 * sqrLenE) {
// lines are different
return 0;
}