Schneider P., Eberly D.H. Geometric Tools for Computer Graphics
Подождите немного. Документ загружается.

444 Chapter 10 Distance in 3D
v
t
u
0
4
5
67
8
3
1
2
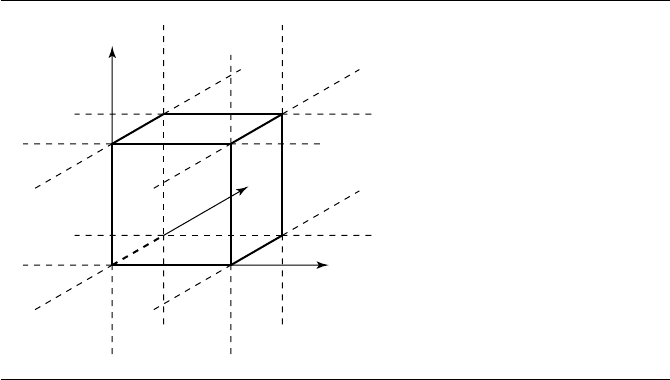
Figure 10.43 The partitioning of the solution domain for a line segment and rectangle.
For each type of linear component, the first step is to find the determinant of
the system, and if it is nonzero, to then compute the solution in order to find the
region in which the solution lies. Once the region has been determined, calculations
specific to that region are made in order to find the point ( ¯u, ¯v,
¯
t) on the boundary
that represents the minimum.
For the case of the line and rectangle distance, the domain is partitioned into an
infinite square column, which defines nine regions. The pseudocode for finding the
region in which the unconstrained solution lies is
float LineRectangleDistanceSquared(Line line, Rectangle rectangle)
{
// Convert to parametric representation
// Assumes rectangle vertices are ordered counterclockwise
V = rectangle.V[0];
e0 = rectangle.V[1] - V;
e1 = rectangle.V[3] - V;
a00 = Dot(e0, e0);
a01 = Dot(e0, e1);
a02 = -Dot(e0, line.direction);
a11 = Dot(e1, e1);
a12 = -Dot(e1, line.direction);
a22 = Dot(line.direction, line.direction);
diff=V-line.base;
10.9 Linear Component to Triangle, Rectangle, Tetrahedron, Oriented Box 445
b0 = Dot(e0, diff);
b1 = Dot(e1, diff);
b2 = Dot(line.direction, diff);
c = Dot(diff, diff);
// Cofactors to be used for determinant
// and inversion of matrix A
cof00 = a11 * a22 - a12 * a12;
cof01 = a02 * a12 - a01 * a22;
cof02 = a01 * a12 - a02 * a11;
det = a00 * cof00 + a01 * cof01 + a02 * cof02;
// Flip determinant and b, to avoid
// special cases later
if (det < 0) {
det = -det;
b0 = -b0;
b1 = -b1;
b2 = -b2;
}
// Check for (near) parallelism
if (det < epsilon) {
// Line and rectangle are parallel.
// Find the closest points by computing
// the distance between the line to
// the segment defining each edge and
// taking the minimum.
Segment seg0 = { rectangle[0], rectangle[1] };
float dist0 = LineLineSegmentDistanceSquared(line, seg0);
Segment seg1 = { rectangle[1], rectangle[2] };
float dist1 = LineLineSegmentDistanceSquared(line, seg1);
Segment seg2 = { rectangle[2], rectangle[3] };
float dist2 = LineLineSegmentDistanceSquared(line, seg2);
Segment seg3 = { rectangle[3], rectangle[0] };
float dist3 = LineLineSegmentDistanceSquared(line, seg3);
return (MIN(seg0, MIN(seg1, MIN(seg2, seg3))));
}
// Compute u, v
446 Chapter 10 Distance in 3D
cof11 = a00 * a22 - a02 * a02;
cof12 = a02 * a01 - a00 * a12;
u = -(cof00 * b0 + cof01 * b1 + cof02 * b2);
v = -(cof01 * b0 + cof11 * b1 + cof12 * b2);
if(s<0){
if(t<0){
region 6;
} else if (t <= det) {
region 5;
} else {
region 4;
}
} else if (s <= det) {
if(t<0){
region 7;
} else if (t <= det) {
region 0;
} else {
region 3;
}
} else {
if(t<0){
region 8;
} else if (t <= det) {
region 1;
} else {
region 2;
}
}
The code for the various regions is implemented in exactly the way that the line-
to-triangle code is built.
Ray to Rectangle and Line Segment to Rectangle
The basic approach for the ray/rectangle and segment/rectangle distance problems is
exactly analogous to that just presented for line/rectangle distance. However, in the
former case, instead of having 9 regions in the domain, we have 18 (the same 9 as
for the line/rectangle case, but doubled because the ray divides its infinite line into
2 regions—t<0 and t ≥ 0); in the latter case, we have 27 regions—three sets of the
same 9 for t<0, 0 ≤ t ≤ 1, and t>1.
10.9 Linear Component to Triangle, Rectangle, Tetrahedron, Oriented Box 447
V
0
V
1
Q
P
d
ˆ
V
3
V
2
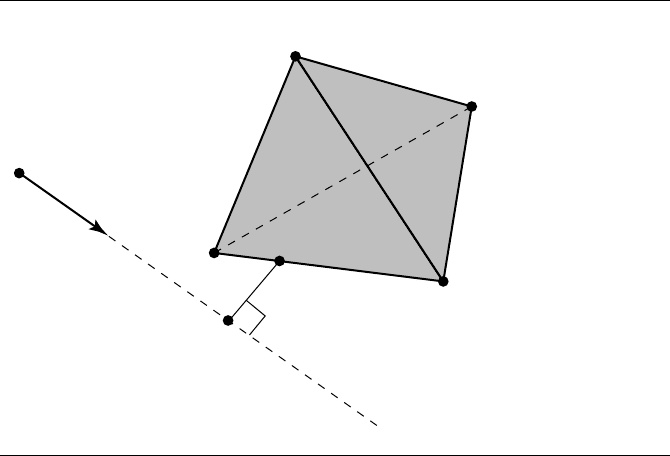
Figure 10.44 Distance between a line and a tetrahedron.
10.9.3 Linear Component to Tetrahedron
In this section we discuss the problem of computing the distance from a linear com-
ponent to a tetrahedron, as shown in Figure 10.44. Let V
i
,0≤i ≤3, be the vertices of
the tetrahedron. The linear component is P + t
ˆ
d,where
ˆ
d is a unit-length vector and
t ∈ R (line), t ≥ 0 (ray), or t ∈ [0, T ] (segment). The construction can be modified
slightly to handle
ˆ
d that is not unit length. The tetrahedron can be parameterized by
V
0
+ s
1
e
1
+ s
2
e
2
+ s
3
e
3
,wheree
i
= V
i
− V
0
, s
i
≥ 0, and s
1
+ s
2
+ s
3
≤ 1.
Distance
Translate the tetrahedron and line by subtracting P . The tetrahedron vertices are
now V
i
= U
i
− P for all i. The line becomes s
ˆ
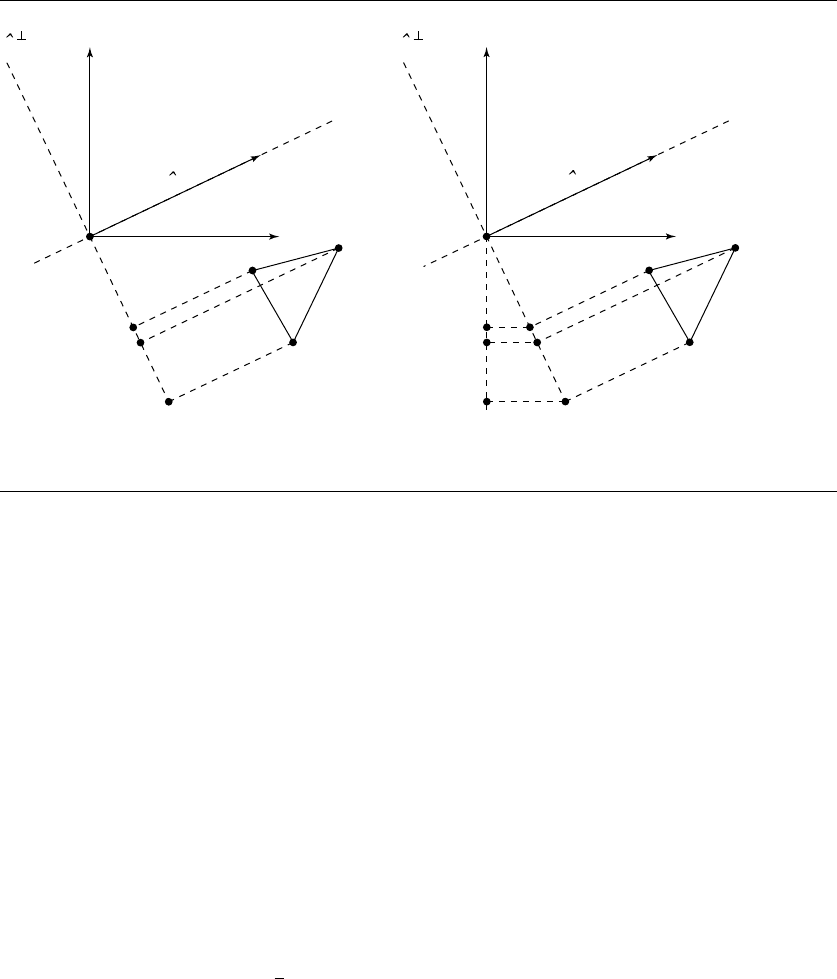
d. Project onto the plane containing
the origin O and having normal
ˆ
d; Figure 10.45(a) shows this projection (in 2D for
clarity). The projected line is the single point O. The projected tetrahedron vertices
are W
i
= (I −
ˆ
d
ˆ
d
T
)V
i
for all i. The boundary of the projected solid tetrahedron is a
convex polygon, either a triangle or a quadrilateral. If the convex polygon contains
O, the distance from the line to the tetrahedron is zero. Otherwise, the distance
from the line to the tetrahedron is the distance from O to the convex polygon. The
448 Chapter 10 Distance in 3D
d
d d
d
x
y
x
y
V
0
V
1
V
2
W
0
W
2
W
1
W'
0
W'
2
W'
1
(a) (b)
Figure 10.45 Projecting a tetrahedron (a) onto a plane perpendicular to
ˆ
d and then (b) into 2D.
projected values are in a plane in 3D and can be projected into 2D with the standard
technique of eliminating the coordinate corresponding to the maximum absolute
component of
ˆ
d, as shown in Figure 10.45(b). The distance between a point and a
convex polygon can be computed in 2D. This value must be adjusted to account for
the 3D-to-2D projection. For example, if
ˆ
d = (d
0
, d
1
, d
2
) with |d
2
|=max
i
{|d
i
|} and
r is the computed 2D distance, then the 3D distance is r/d
2
.
Closest Points
The set of tetrahedron points closest to the line in many cases consists of a single
point. In other cases, the set can consist of a line segment of points. For example, con-
sider the tetrahedron with vertices (0, 0, 0), (1, 0, 0), (0, 1, 0), and (0, 0, 1). The line
(1/4, 1/4, 0) +t(0, 0, 1) intersects the tetrahedron for t ∈ [0, 1/2], so the correspond-
ing points are zero units of distance from the tetrahedron. The line (−1, −1, 1/2) +
t(0, 0, 1) is
√
2 units of distance from the tetrahedron. The closest points on the line
are generated by t ∈ [0, 1/2], and the closest points on the tetrahedron are (0, 0, t)for
the same interval of t values. The line (1/2, −1/2, 0) +t(0, 0, 1) is 1/2 units of distance

10.9 Linear Component to Triangle, Rectangle, Tetrahedron, Oriented Box 449
from the tetrahedron. The closest points on the line are generated by t ∈[0, 1/2], and
the closest points on the tetrahedron are (1/2, 0, t) for the same interval of t values.
Case 1 Let O be strictly inside the convex polygon. In this case, the line intersects the tetra-
hedron in an interval of points. Let E = [e
1
e
2
e
3
] be the matrix whose columns are
the specified edge vectors of the tetrahedron. Let s be the 3 ×1 vector whose com-
ponents are the s
i
parameters. The line segment of intersection is t
ˆ
d + P = Es + V
0
for t ∈ [t
min
, t
max
].Theproblemnowistocomputethet-interval. The edge vectors
of the tetrahedron are linearly independent, so E is invertible. Multiplying the vector
equation by the inverse and solving for the tetrahedron parameters yields
s = E
−1
t
ˆ
d + P − V
0
=at +
b
where a = (a
1
, a
2
, a
3
) = E
−1
ˆ
d and
b = (b
1
, b
2
, b
3
) = E
−1
(P − V
0
). The parameters
s must satisfy the inequality constraints for the tetrahedron. The parameter t is
therefore constrained by the four inequalities:
a
1
t + b
1
≥ 0, a
2
t + b
2
≥ 0, a
3
t + b
3
≥ 0, (a
1
+ a
2
+ a
3
)t + (b
1
+ b
2
+ b
3
) ≤ 1
Each of these inequalities defines a semi-infinite interval of the form [
¯
t, ∞) or
(−∞,
¯
t]. In this particular case, we know the intersection of the four intervals must
be nonempty and of the form [t
min
, t
max
].
The division required to compute E
−1
can be avoided. Let us assume that the
tetrahedron is oriented so that det(E)>0. Multiply by the adjoint E
adj
to obtain
det(E)s = E
adj
t
ˆ
d + P − V
0
=αt +
β
The four t-inequalities are of the same form as earlier, but where a
i
refers to the
components of α, b
i
refers to the components of
β, and the last inequality becomes a
comparison to det(E) instead of to 1.
Case 2 Let O be on the convex polygon boundary or outside the polygon. Let C be the
closest polygon point (in 3D) to O. The line t
ˆ
d + C intersects the tetrahedron with
U
i
vertices either in a single point or in an interval of points. The method in Case
1 may be used again, but now you need to be careful with the interval construction
when using floating-point arithmetic. If the intersection is a single point, theoretically
t
min
= t
max
, but numerically you might wind up with an empty intersection. It is not
difficult to trap this and handle appropriately. Observe that Cases 1 and 2 are handled
by the same code since in Case 1 you can choose C =O.
450 Chapter 10 Distance in 3D
Ray and Tetrahedron
Use the line-tetrahedron algorithm for computing the closest line points with param-
eters I =[t
min
, t
max
](with possibly t
min
=t
max
). Define J =I ∩[0, ∞).IfJ =∅, the
ray-tetrahedron distance is the same as the line-tetrahedron distance. The closest ray
points are determined by J .IfJ =∅, the ray origin P is closest to the tetrahedron.
Segment and Tetrahedron
Use the line-tetrahedron algorithm for computing the closest line points with pa-
rameters [t
min
, t
max
] (with possibly t
min
= t
max
). Define J =I ∩ [0, T ]. If J =∅, the
segment-tetrahedron distance is the same as the line-tetrahedron distance. The clos-
est segment points are determined by J .IfJ =∅, the closest segment point is P when
t
max
< 0orP + T
ˆ
d when t
min
>T.
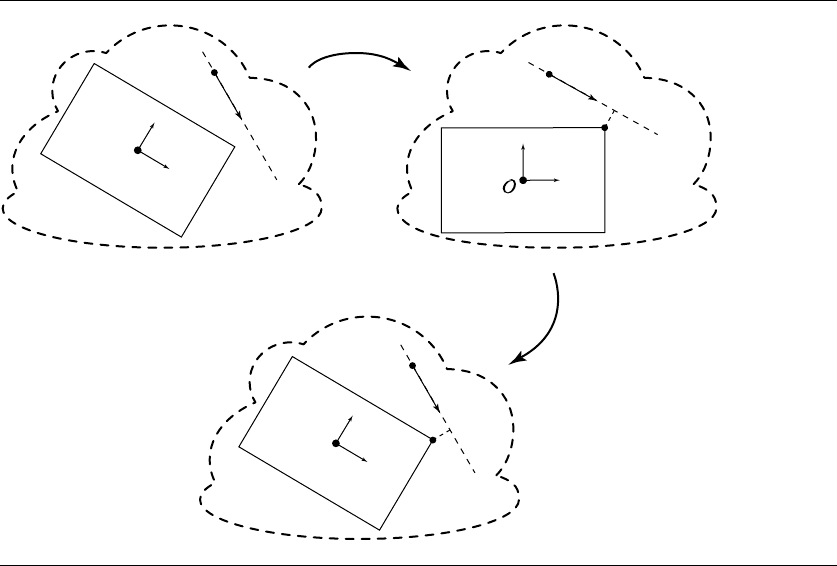
10.9.4 Linear Component to Oriented Bounding Box
In this section we discuss the problem of computing the distance between a linear
component and an oriented bounding box (OBB). A linear component is defined as
a base point and a direction vector:
L(t) = P + t
d
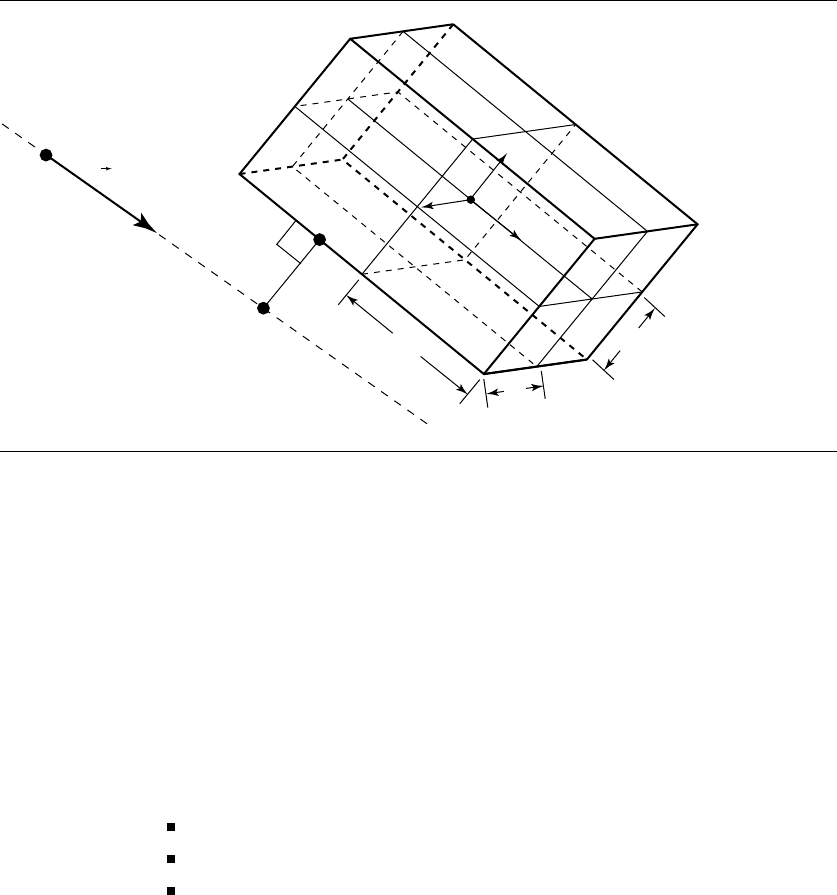
An OBB is defined as a centerpoint C; three orthonormal orientation vectors ˆu, ˆv,
and ˆw; and three half-extents h
u
, h
v
, and h
w
, as shown in Figure 10.46.
The naive approach would compute the squared distance between the line and
each of the six faces and take the minimum of these; however, this would be quite
expensive because of the arbitrary orientation of the faces and also would fail to
exploit the fact that each face is parallel or orthogonal to every other face.
The approach we take here is analogous to that taken for the problem of comput-
ing the distance of a point to an OBB, as described in Section 10.4.2.
The OBB’s centerpoint C and ˆu, ˆv, and ˆw define a frame. Observe that, relative
to that frame, the OBB is an axis-aligned box centered at the origin, whose sides are
each parallel to either the x-, y-, or z-axis. If we transform the line {P ,
d} into this
frame, then we can exploit this axis-aligned, origin-centered nature of the OBB and
compute the closest point, and the distance to it, more efficiently.
Given the OBB’s center C and ˆu, ˆv, and ˆw, a point P ’s coordinates in that frame
can be computed as
P
=
[
(P − C) ·ˆu(P− C) ·ˆv(P− C) ·ˆw
]
10.9 Linear Component to Triangle, Rectangle, Tetrahedron, Oriented Box 451
P
C
d
w
ˆ
û
v
ˆ
h
v
h
w
h
u
Figure 10.46
Distance between a line and an oriented bounding box.
That is, we simply project the vector between the P and C onto each of the OBB’s
basis vectors. Note that this is functionally equivalent to creating a transform T from
global space into the local space of the OBB with matrix
T =
ˆu
T
ˆv
T
ˆw
T
0
T
−C 1
and multiplying by P , but is more efficient. The same process may be applied to
d,
the direction vector for the line.
Once inside the frame of the OBB, we can compute three things:
The coordinates of the closest point on the OBB to the line.
The parameter of the point on the line closest to the OBB.
The squared distance between the OBB and the line.
(Note that, of course, if the line intersects the OBB, then the distance is 0, and the
other two pieces of information are moot.)
The coordinates of the closest point on the OBB are found in a frame whose
origin is [
000
] and whose basis vectors are orthonormal. Because of this, we
452 Chapter 10 Distance in 3D
P
v
C
û
ˆ
v
C
P
û
ˆ
P' = T(P)
x
y
Q
T
T
–1
Figure 10.47 Schematic for line-OBB distance algorithm.
can view these coordinates as parameter values of the closest point on the OBB, in
the untransformed frame. If we want the actual location of the closest point in that
frame, we simply have to compute the following:
Q = C + Q
x
ˆu + Q
y
ˆv + Q
z
ˆw
Of course, the parameter of the point on the transformed line can simply be applied
to the untransformed line, in order to find the actual point (if this is desired) in the
untransformed frame. Figure 10.47 shows a schematic of this process (shown in 2D
for clarity).
Once the line has been transformed into the OBB’s local frame, we can exploit
the fact that the faces are all parallel to the basis vectors of the frame. Certainly, it is
more efficient to compute intersections and distances when the “target” is parallel to
a basis vector, but we exploit this even further by breaking down the configurations
into several cases, to which we apply an algorithm that computes only the minimum
necessary for each case.
10.9 Linear Component to Triangle, Rectangle, Tetrahedron, Oriented Box 453
The configurations are categorized by looking at the (now-transformed) direc-
tion vector
d
of the line L. Specifically, we look for how many components of
d
are zero—there may be none, one, two, or three. We discuss these cases in order of
increasing complexity.
For the cases of zero, one, or two zero-components, we employ a bit of a “trick” in
the implementation. We consider the values of the components of
d
:ifacomponent
is negative, we flip its sign and flip the sign of the corresponding component of P
.
We then proceed with the rest of the algorithm, and then flip the corresponding
components of the resulting nearest point on the OBB (this works because the OBB
is symmetric about the origin in all three dimensions). This ensures that all the
components of
d
are nonnegative, which reduces the number of cases we have to
consider.
Three Zero-Components
In this case, the line is simply a point, and the problem degenerates into finding the
distance from a point to an axis-aligned box, the solution to which may be found in
Section 10.4.2.
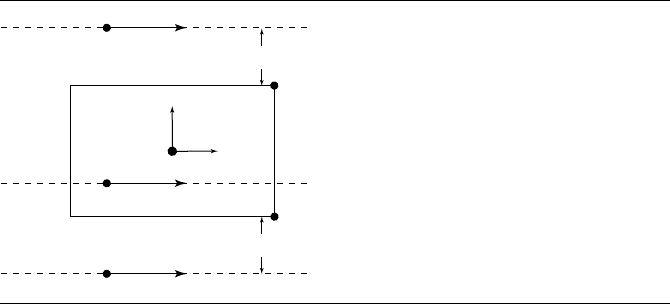
Two Zero-Components
In this case, the transformed line is perpendicular to two of the basis vectors and
parallel to the third. Figure 10.48 shows a line that is perpendicular to the y- and
z-axes of the OBB; the line may be above, within, or below the OBB.
x
y
Q
dist
dist = 0
dist
Q
Figure 10.48 Case of two zero-components.