Schneider P., Eberly D.H. Geometric Tools for Computer Graphics
Подождите немного. Документ загружается.


604 Chapter 11 Intersection in 3D
The object-type-specific implicit equations for the sphere, cone, and cylinder are
as follows:
Sphere: (P − B) · (P −B) − r
2
= 0 (11.35)
Cylinder: (P −B) · (P −B) − ((P − B) ·ˆw)
2
− r
2
= 0 (11.36)
Cone: ((P − B) ·ˆw)
2
− cos
2
(α)(P −B) · (P −B) =0 (11.37)
The basic steps of Miller’s method can be outlined as follows:
1. Choose one of the two (possibly) intersecting surfaces as the parameterization
surface.
2. Substitute the parametric form of the parameterization surface (e.g., Equa-
tion 11.33 or 11.34) into the implicit equation for the other surface (i.e., one
of Equations 11.35, 11.36, or 11.37).
3. Manipulate the resulting equation until it is in the form a(t)s
2
+b(t)s +c(t) =0.
The resulting equation’s functions a, b, and c will have, as Miller points out, “obvious
geometric interpretations.”
11.9.2 Ellipsoids
This section describes how to compute information about intersections of ellipsoids.
We cover the typical query: test for intersection without actually computing the
intersection set. Additionally we show how to determine if one ellipsoid is properly
contained in another. The latter method is based on the same idea shown in Section
7.5.3 for ellipses. The precise queries we answer for testing for intersection of two
ellipsoids E
0
and E
1
are
Do E
0
and E
1
intersect?
Are E
0
and E
1
separated? That is, does there exist a plane for which the ellipsoids
are on opposite sides?
Is E
0
properly contained in E
1
,orisE
1
properly contained in E
0
?
Finding the set of intersection points is more complicated. A couple of meth-
ods are discussed. In this section, ellipsoid E
i
is defined by the quadratic equation
Q
i
(X) = X
T
A
i
X +B
T
i
X +c
i
= 0, where A
i
isa3× 3 positive definite matrix, B
i
isa3× 1vector,c
i
is a scalar, and X
i
isa3× 1 vector that represents an ellipsoid
point. Because A is positive definite, Q
i
(X) < 0 defines the inside of the ellipsoid
and Q
i
(X) > 0 defines the outside.

11.9 Quadric Surfaces 605
Testing for Intersections
The analysis is based on level surfaces of the quadratic functions. Section A.9.1 pro-
vides a discussion of level sets of functions. All level surfaces defined by Q
0
(x, y, z) =
λ are ellipsoids, except for the minimum (negative) value λ for which the equation
defines a single point, the center of every level surface ellipsoid. The ellipsoid defined
by Q
1
(x, y, z) = 0 is a surface that generally intersects many level surfaces of Q
0
.The
problem is to find the minimum Q
0
-level value λ
0
and the maximum Q
0
-level value
λ
1
attained by any point (x, y, z) on the ellipsoid E
1
.Ifλ
1
< 0, E
1
is properly con-
tained in E
0
.Ifλ
0
> 0, then E
0
and E
1
are separated, or E
1
contains E
0
. Otherwise,
0 ∈[λ
0
, λ
1
]and the two ellipsoids intersect. Illustrations in two dimensions are shown
in Figures 7.7, 7.8, and 7.9, but apply equally well to the three-dimensional case.
The problem can be formulated as a constrained optimization that is solved
by the method of Lagrange multipliers (Section A.9.3). Optimize Q
0
(X) subject
to the constraint Q
1
(X) = 0. Define F(X, t) = Q
0
(X) + tQ
1
(X). Differentiating
with respect to the X-components yields
∇F =
∇Q
0
+ t
∇Q
1
. Differentiating with
respect to t yields ∂F /∂t = Q
1
. Setting the t-derivative equal to zero reproduces the
constraint Q
1
=0. Setting the X-derivative equal to zero yields
∇Q
0
+t
∇Q
1
=
0 for
some t. Geometrically this means the gradients are parallel.
Note that
∇Q
i
= 2A
i
X + B
i
,so
0 =
∇Q
0
+ t
∇Q
1
= 2(A
0
+ tA
1
)X + (B
0
+ tB
1
)
Formally solving for X yields
X =−
1
2
(A
0
+ tA
1
)
−1
(B
0
+ tB
1
) =
1
δ(t)
Y(t)
where A
0
+ tA
1
is a matrix of linear polynomials in t and δ(t) is its determinant, a
cubic polynomial in t. The components of Y(t)are cubic polynomials in t. Replacing
this in Q
1
(X) = 0 yields
Y(t)
T
A
1
Y(t)+ δ(t)B
T
1
Y(t)+ δ(t)
2
C
1
= 0
a sixth-degree polynomial in t. The roots can be computed, the corresponding values
of X computed, and Q
0
(X) evaluated. The minimum and maximum values are
stored as λ
0
and λ
1
, and the earlier comparisons with zero are applied.
Finding Intersections
The quadratic equations for the ellipsoid can be written as quadratic polynomials in
z whose coefficients are functions of x and y: Q
0
(x, y, z) = α
0
(x, y) + α
1
(x, y)z +
α
2
(x, y)z
2
and Q
1
(x, y, z) =β
0
(x, y) +β
1
(x, y)z +β
2
(x, y)z
2
. Using the method of

606 Chapter 11 Intersection in 3D
elimination discussed in Section A.2, the two equations have a common z-root if and
only if the B
´
ezout determinant is zero,
R(x, y) = (α
2
β
1
− α
1
β
2
)(α
1
β
0
− α
0
β
1
) − (α
2
β
0
− α
0
β
2
)
2
= 0 (11.38)
The polynomial R(x, y) has degree at most 4. If (x, y) is a solution to R(x, y) = 0,
the common z-root is
z =
α
2
β
0
− α
0
β
2
α
1
β
2
− α
2
β
1
If Equation 11.38 has any solutions, there must be at least one solution (x, y) that
is closest to the origin. This problem can be set up as a constrained minimization:
Minimize x
2
+ y
2
subject to the constraint R(x, y) = 0. Applying the method of
Lagrange multipliers (see Section A.9.3), define F(x, y, t) =x
2
+y
2
+tR(x, y).The
derivatives are
(F
x
, F
y
, F
t
) = (2x +tR
x
,2y +tR
y
, R)
where the variable subscripts indicate partial derivatives with respect to those vari-
ables. The equation F
t
=0 just reproduces the constraint R = 0. The equations F
x
=
0 and F
y
= 0 yield 2x + tR
x
= 0 and 2y +tR
y
= 0. Eliminating t produces another
polynomial equation
S(x, y) = yR
x
− xR
y
= 0. (11.39)
The polynomial S(x, y) also has degree at most 4.
We now have two polynomial equations in two unknowns, R(x, y) = 0 and
S(x, y) = 0. Each polynomial can be written as polynomials in y whose coefficients
are polynomials in x: R(x, y) =
4
i=0
α
i
(x)y
i
and S(x, y) =
4
i=0
β
i
(x)y
i
.The
B
´
ezout matrix for the two polynomials in y is the 4 × 4 matrix M = [M
ij
] with
M
ij
=
min(4,7−i−j)
k=max(4−j ,4−i)
w
k,7−i−j−k
for 0 ≤i ≤ 3 and 0 ≤j ≤3, with w
i,j
=α
i
β
j
−α
j
β
i
for 0 ≤i ≤ 4 and 0 ≤ j ≤4. In
expanded form,
M =
w
4,3
w
4,2
w
4,1
w
4,0
w
4,2
w
3,2
+ w
4,1
w
3,1
+ w
4,0
w
3,0
w
4,1
w
3,1
+ w
4,0
w
2,1
+ w
3,0
w
2,0
w
4,0
w
3,0
w
2,0
w
1,0

11.9 Quadric Surfaces 607
The degrees of α
i
and β
i
are at most 4 −i. The degree of w
i,j
is at most 8 −i −j .The
B
´
ezout determinant is D(x) = det(M(x)), a polynomial of degree at most 16 in x.
The roots of D(x) = 0 are computed. For each root ¯x, the coefficients of f(y)
are computed and the y-roots for R( ¯x, y) = 0 are computed. If ¯y is such a root,
the pair ( ¯x, ¯y) is tested to make sure S(¯x, ¯y) = 0. If so, we have found a point of
intersection for the two ellipsoids. If the point is an isolated one, the two ellipsoids are
tangent at that point. The point is isolated if ∇Q
0
( ¯x, ¯y) and ∇Q
1
( ¯x, ¯y) are parallel. A
simple verification that the cross product of the gradient vectors is the zero vector will
suffice. If the point is not isolated, the intersection set will consist of a closed curve.
A differential equation solver can be used to traverse the curve:
dx
dt
= R
y
(x, y),
dy
dt
=−R
x
(x, y), (x(0), y(0)) = ( ¯x, ¯y) (11.40)
The vector (R
x
, R
y
) is normal to the level curve defined by R = 0, so the vector
(R
y
, −R
x
) is tangent to the level curve. The differential equations just specify to
traverse the curve by following the tangent vector.
The main problem with the former algorithm is that numerically finding the roots
of a degree 16 polynomial can be an ill-conditioned problem. An alternative is to use
an iterative search by setting up a system of differential equations that allows you to
walk along one ellipsoid in search of a point of intersection with the other ellipsoid.
The search will either find a point or determine that there is none.
Start with a point X
0
on ellipsoid E
0
,soQ
0
(X
0
) = 0. If Q
1
(X
0
) = 0, we already
have a point of intersection. If Q
1
(X
0
)<0, then X
0
is inside the ellipsoid E
1
.The
idea is to walk tangentially along the first ellipsoid while increasing the value of Q
1
to zero. In space, the direction of largest increase of Q
1
is
∇Q
1
. This vector is normal
to ellipsoid E
1
but is usually not tangent to the ellipsoid E
0
. The vector must be
projected onto the tangent space of E
0
by subtracting the contribution by
∇Q
0
.The
path on E
0
with the largest increase in Q
1
locally is determined by
dX
dt
=
∇Q
1
−
∇Q
1
·
∇Q
0
∇Q
0
2
∇Q
0
, X(0) = X
0
In the event that Q
1
(X
0
)>0, the tangent direction must be reversed so that Q
1
is
decreased as rapidly as possible to zero. The differential equations for this case are
dX
dt
=−
∇Q
1
+
∇Q
1
·
∇Q
0
∇Q
0
2
∇Q
0
, X(0) = X
0
Regardless of whether the ellipsoids intersect, eventually the traversal will lead to
a point for which the gradients are parallel. In this case the right-hand side of the
differential equation reduces to the zero vector. The length of the right-hand side
vector can be used as a termination criterion in the numerical solver. Another concern
is that the numerical solver will produce a new position from an old one and, because

608 Chapter 11 Intersection in 3D
of numerical error, the new position might not be on the first ellipsoid. A correction
can be made to adjust the new position so that it is on the first ellipsoid. The corrected
value can be used to generate the next iterate in the solver.
Once a point X
1
=X(T ) at some time T>0 for which Q
1
(X
1
) =0, the 2D level
curve traversal of Equation 11.40 can be applied. However, it is possible to traverse the
curve of intersection directly in 3D. A tangent vector for the curve is perpendicular
to both
∇Q
0
and
∇Q
1
. The system of equations to solve is
dX
dt
=
∇Q
0
×
∇Q
1
, X(0) = X
1
Regardless of which system of differential equations is used to traverse the intersec-
tion curve, some type of stopping criterion must be implemented that detects the
traversal has reached the point X
0
at which the traversal originated.
11.10 Polynomial Surfaces
In this section, we briefly discuss the general problem of computing the intersection
of two polynomial surfaces and point you to some of the wealth of literature address-
ing this difficult and important problem.
The problem of surface-surface intersections (SSIs) arises quite frequently in
many computer graphics applications—modeling, finite-element mesh generation,
tool path specification, scientific visualization, interference and feature detection,
and so on. SSIs are obviously very significant in boundary-rep geometric modeling
applications, and the intersection of algebraic and NURBS surfaces is considered to
be a fundamental consideration in the integration of geometric and solid modeling
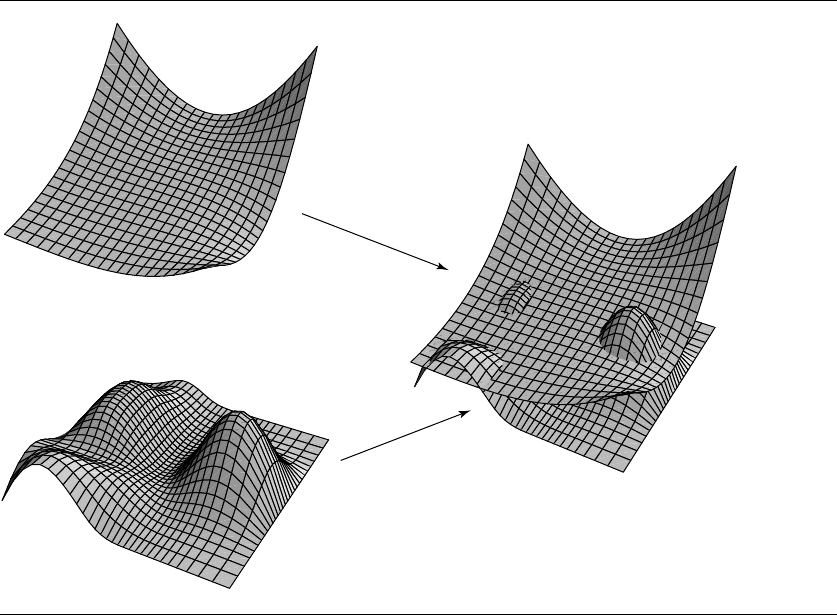
systems. Figure 11.59 shows two B-spline surfaces intersecting in two closed loops
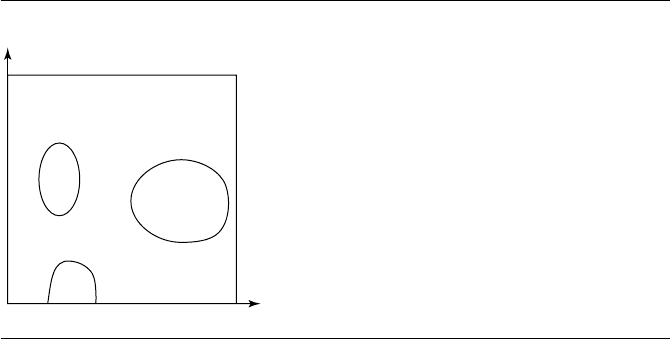
and one open curve. Figure 11.60 shows the intersection curves in the parameter
space of one of the surfaces.
A very large body of work, stretching back several decades, addresses the problems
associated with SSI. Recent surveys can be found in Patrikalakis (1993), Pratt and
Geisow (1986), and Hoffman (1989). SSI algorithms are typically classified into four
categories: subdivision methods, lattice evaluation, analytic methods, and marching
methods. Various hybrids involving several of these methods have been proposed as
well.
11.10.1 Subdivision Methods
The core idea here is to (recursively) decompose the problem into smaller and sim-
pler problems; a trivial example would be to recursively subdivide the surfaces into
bilinear patches, which would then be intersected. Subdivision continues until some
stated criteria are reached, at which point the individual curves are pieced together
to form one or more contiguous curves. Typically, subdivision control is based on
11.10 Polynomial Surfaces 609
Figure 11.59 Intersection of two B-spline surfaces.
geometric properties of the control polygon—for example, variation-diminishing
property, convex hull, and so on (Lane and Riesenfeld 1980; Lasser 1986). In the limit,
subdivision methods converge on the actual intersection curve, but tend to produce
very large amounts of data and run quite slowly. Attempts to reduce these problems
by constraining the level of subdivision can improve the speed, but risk missing small
features such as loops, or miss or incorrectly connect singularities.
11.10.2 Lattice Evaluation
In this approach, the surface intersection problem is reduced to a series of problems
of lower geometric complexity, such as curve-surface intersections (Rossignac and
Requicha 1987). Like the subdivision methods, lattice approaches tend to be slow
and also exhibit problems with respect to missing loops and singularities.
610 Chapter 11 Intersection in 3D
u
v
Figure 11.60 Intersection curves in one surface’s parameter space.
11.10.3 Analytic Methods
The approach here is to attempt to find an explicit representation of the intersection
curve. This has found success only in a limited area—generally cases in which the
intersection curve is of low degree (Sederberg 1983; Sarraga 1983) and/or is limited
to special cases or specific types of surfaces (Piegl 1989; Miller 1987; Miller and
Goldman 1992, 1995) using a geometric (as opposed to strictly algebraic) approach.
11.10.4 Marching Methods
Also known as curve tracing, the basic idea behind marching is this (Hoffman 1989,
206):
Atapointp on the intersection, a local approximation of the curve is constructed;
for example, the curve tangent at p. By stepping along the approximation a spe-
cific distance, we obtain an estimate of the next curve point that we then refine
using an iterative method.
Tracing/marching methods seem to be the most widely used (Barnhill and Kersey
1990; Farouki 1986; Bajaj et al. 1989). The reasons cited (Krishnan and Manocha
1997) are their (relative) ease of implementation and their generality (they can handle
such things as offsets and blends, which are particularly important in CAD appli-
cations). Two major issues arise in this approach: first, the starting points for the
intersection curves must be identified. Intersection curves, as we have seen, may be
boundary segments or closed loops, and degeneracies such as singularities may be
present. Boundary segment start points can be identified by curve-surface intersec-
11.11 The Method of Separating Axes 611
tion methods (Sederberg and Nishita 1991). Detection of closed loops has proven
more problematic; most approaches use Gauss maps for bounding and simply sub-
divide the surface until “sufficient conditions for the non-existence of loops are sat-
isfied” (Krishnan and Manocha 1997).
The second major issue for tracing methods is this: once the start point(s) are
identified, most algorithms use a variant of Newton’s method to do the actual tracing.
However, in practice the step size must be kept very small to avoid what is referred to
as component jumping. The result is that this operation can be very slow. Relatively
more recent work by Krishnan and Manocha (1997) has addressed these significant
issues with a good deal of success.
11.11 The Method of Separating Axes
The concept of separating axes in three dimensions is identical to that of two dimen-
sions in Section 7.7. Two stationary convex objects do not intersect if there exists
a line for which the projections of the objects onto that line do not intersect. The
method applies to moving convex objects, and the geometric queries test-intersection
and find-intersection can be formulated just as in two dimensions.
11.11.1 Separation of Stationary Convex Polyhedra
In two dimensions we concentrated our efforts on convex polygons. In three dimen-
sions we focus on convex polyhedra, but particular attention must be given to the
case when both polyhedra are really planar polygons. For a pair of convex polyhedra,
only a finite set of direction vectors needs to be considered for separation tests. This
is analogous to the two-dimensional problem with convex polygons, but we do not
provide a proof of the claim in three dimensions. The intuition, however, is similar
to that of convex polygons in two dimensions. If the two polyhedra are just touching
with no interpenetration, the contact is one of face-face, face-edge, face-vertex, edge-
edge, edge-vertex, or vertex-vertex. The set of potential directions that capture these
types of contact includes the normal vectors to the faces of the polyhedra and vectors
generatedbyacrossproductoftwoedges,onefromeachpolyhedron.
Let C
j
for j = 0, 1 be the convex polyhedra with vertices {V
(j)
i
}
N
j
−1
i=0
, edges
{e
(j)
i
}
M
j
−1
i=0
, and faces {F
(j)
i
}
L
j
−1
i=0
. Let the faces be planar convex polygons whose ver-
tices are counterclockwise ordered as you view the face from outside the polyhedron.
Outward-pointing normal vectors can be stored with each face as a way of storing the
orientation. We assume that each face has queries that allow access to the face normal
and to vertices on the face. We assume that each edge has a query that allows access
to its vertices.
The pseudocode for testing for intersection of two convex polyhedra, both having
positive volume (so L
j
≥ 4), is similar to the direct implementation in 2D:
612 Chapter 11 Intersection in 3D
bool TestIntersection(ConvexPolyhedron C0, ConvexPolyhedron C1)
{
// test faces of C0 for separation
for (i = 0; i < C0.L; i++) {
D = C0.F(i).normal;
ComputeInterval(C0, D, min0, max0);
ComputeInterval(C1, D, min1, max1);
if (max1 < min0 || max0 < min1 )
return false;
}
// test faces of C1 for separation
for (j = 0; j < C1.L; j++) {
D = C1.F(j).normal;
ComputeInterval(C0, D, min0, max0);
ComputeInterval(C1, D, min1, max1);
if ( max1 < min0 || max0 < min1)
return false;
}
// test cross products of pairs of edges
for (i = 0; i < C0.M; i++) {
for (j = 0; j < C1.M; j++) {
D = Cross(C0.E(i), C1.E(j));
ComputeInterval(C0, D, min0, max0);
ComputeInterval(C1, D, min1, max1);
if (max1 < min0 || max0 < min1)
return false;
}
}
return true;
}
void ComputeInterval(ConvexPolyhedron C, Point D, float& min, float& max)
{
min = Dot(D, C.V(0)); max = min;
for (i = 1; i < C.N; i++) {
value = Dot(D, C.V(i));
if (value < min) min = value; else max = value;
}
}
11.11 The Method of Separating Axes 613
The asymptotically better algorithm for finding the extreme points of a convex
polygon in 2D does have a counterpart in 3D. Given n vertices, it is possible to find
extreme points in O(log n) time (Kirkpatrick 1983; Dobkin and Kirkpatrick 1990). A
well-written presentation of the algorithm is provided in O’Rourke (1998). However,
for applications that have small n or those that have polyhedra with a lot of symmetry,
typically oriented bounding boxes, the time spent implementing, testing, and debug-
ging this algorithm is probably not justified, especially if the constant in the O(log n)
algorithm is sufficiently large compared to the constant in the straightforward O(n)
algorithm.
The
TestIntersection pseudocode listed earlier has problems when both convex
polyhedra are convex polygons in the same plane. In this case the common normal
vector is not a separating direction. The cross product of any pair of edges is again a
normal vector to the plane, so it cannot separate the two polygons. In fact, coplanar
convex polygons in 3D must be handled with the algorithm for convex polygons
in 2D. All that we need in 3D are vectors that are in the plane of the polygons
and are perpendicular to the appropriate edges. If n is a plane normal and if e is
an edge vector for a polygon, then n ×e is a potential separating direction. The
pseudocode is
bool TestIntersection(ConvexPolygon C0, ConvexPolygon C1)
{
// test normal of C0 for separation
D = C0.normal;
ComputeInterval(C0, D, min0, max0);
ComputeInterval(C1, D, min1, max1);
if (max1 < min0 || max0 < min1)
return false;
Point N0xN1 = Cross(C0.normal, C1.normal);
if (N0xN1 != 0) {
// polygons are not parallel
// test normal of C1 for separation
D = C1.normal;
ComputeInterval(C0, D, min0, max0);
ComputeInterval(C1, D, min1, max1);
if (max1 < min0 || max0 < min1)
return false;
// test cross products of pairs of edges
for (i = 0; i < C0.M; i++) {
for (j = 0; j < C1.M; j++) {
D = Cross(C0.E(i), C1.E(j));
ComputeInterval(C0, D, min0, max0);
ComputeInterval(C1, D, min1, max1);