Schneider P., Eberly D.H. Geometric Tools for Computer Graphics
Подождите немного. Документ загружается.

864 Appendix A Numerical Methods
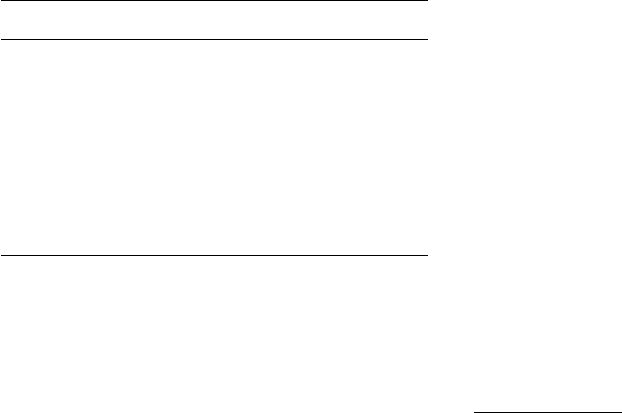
Table A.2 Comparison of operation counts for converting between representations of rotations.
Conversion A M D F C
Axis-angle to matrix 13 15 2
Matrix to axis-angle 8 7 1 2
Axis-angle to quaternion 1 5 1 2
Quaternion to axis-angle 4 2
Quaternion to matrix 12 12
Matrix to quaternion (τ>0) 6 5 1 1 1
Matrix to quaternion (τ ≤0) 6 5 1 1 3
x = λ(r
21
− r
12
), y = λ(r
02
− r
20
), and z = λ(r
10
− r
01
) require 3 additions and 3
multiplications. The total cost is 6A + 5M + 1D + 1F +1C.
If τ ≤ 0, the maximum of the diagonal entries of the rotation matrix must be
found. This requires two comparisons; call this cost 2C. For the sake of argument,
suppose that r
00
is the maximum. The calculation x =
√
r
00
− r
11
− r
22
+ 1/2re-
quires 3 additions, 1 multiplication, and 1 function call. The expression λ = 1/(4x)
requires 1multiplication and 1 division. The terms w =λ(r
21
−r
12
), y =λ(r
10
+r
01
),
and z = λ(r
20
+r
02
) require 3 additions and 3 multiplications. The total cost is 6A +
5M +1D +1F + 3C.
Table A.2 is a summary of the costs of converting among the various rotation
representations.
Transformation Time
The transformation of v by a rotation matrix is the product u = Rv and requires 9
multiplications and 6 additions for a total of 15 operations.
If v = (v
0
, v
1
, v
2
) and if v = v
0
i + v
1
j + v
2
k is the corresponding quaternion
with zero w-component, then the rotate vector u = (u
0
, u
1
, u
2
) is computed as u =
u
0
i +u
1
j +u
2
k =qvq
∗
. Applying the general formula for quaternion multiplication
directly, the product p = qv requires 16 multiplications and 12 additions. The prod-
uct pq
∗
also uses the same number of operations. The total operation count is 56.
However, since v has no w-term, p only requires 12 multiplications and 8 additions—
one term is theoretically zero, so no need to compute it. We also know that u has
no w-term, so the product pq
∗
only requires 12 multiplications and 9 additions.
Using these optimizations, the total operation count is 41. Observe that conversion
from quaternion q to rotation matrix R requires 12 multiplications and 12 additions.
Transforming v by R takes 15 operations. Therefore, the process of converting to ro-
tation and multiplying uses 39 operations, 2 less than calculating qvq
∗
. Purists who
A.4 Representations of 3D Rotations 865
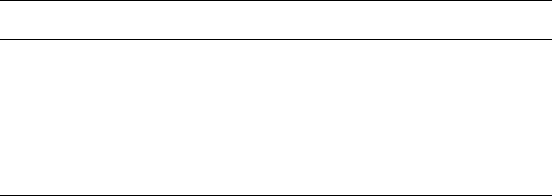
Table A.3
Comparison of operation counts for transforming one vector.
Representation A M Comments
Rotation matrix 6 9
Axis-angle 12 18
Quaternion 24 32 Using generic quaternion multiplies
Quaternion 17 24 Using specialized quaternion multiplies
Quaternion 18 21 Convert to matrix, then multiply
implement quaternion libraries and only use quaternions will sadly lose a lot of cycles
when transforming large sets of vertices.
The formula for transforming v using an axis-angle pair is
Rv =v +(sin θ)ˆa ×v +(1 − cos θ)ˆa ×( ˆa ×v)
As indicated earlier, sin θ and 1 − cos θ should be precomputed and stored in addi-
tion to the axis and angle, a total of 6 floats. The cross product ˆa ׈v uses 6 multi-
plications and 3 additions. So does ˆa × ( ˆa ׈v), assuming the cross product in the
parentheses was computed first and stored in temporary memory. Multiplying the
cross products by a scalar requires 6 multiplications. Adding three vectors requires 6
additions. Therefore, we need to use 18 multiplications and 12 additions, for a total
of 30 operations.
Therefore, the rotational formulation yields the fastest transforming. The quater-
nion formulation yields the slowest transforming for a single vector. But keep in mind
that a batch transform of n vectors requires converting the quaternion to a rotation
matrix only once at a cost of 24 operations. The total operations for transforming
by quaternion are 24 + 15n. The axis-angle formulation uses 30n, so the quaternion
transformation is faster for two or more vectors. Table A.3 is a summary of the opera-
tion counts for transforming a single vector. Table A.4 is a summary of the operation
counts for transforming n vectors.
Composition
The product of two rotation matrices requires 27 multiplications and 18 additions,
for a total cost of 18A + 27M.
The product of two quaternions requires 16 multiplications and 12 additions, for
a total cost of 12A + 16M, clearly outperforming matrix multiplication. Moreover,
renormalizing a quaternion to adjust for floating-point errors is cheaper than renor-
malizing a rotation matrix using Gram-Schmidt orthonormalization.
866 Appendix A Numerical Methods
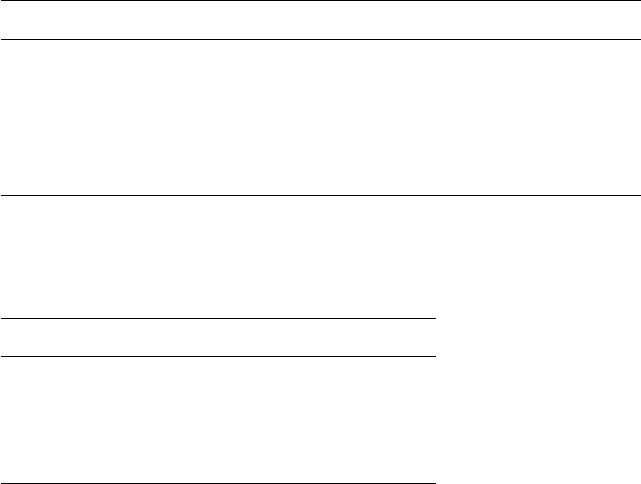
Table A.4 Comparison of operation counts for transforming n vectors.
Representation A M Comments
Rotation matrix 6n 9n
Axis-angle 12n 18n
Quaternion 24n 32n Using generic quaternion multiplies
Quaternion 17n 24n Using specialized quaternion multiplies
Quaternion 12 + 6n 12 +9n Convert to matrix, then multiply
Table A.5 Comparison of operation counts for composition.
Representation A M D F
Rotation matrix 18 27
Quaternion 12 16
Axis-angle (convert to matrix) 52 64 1 6
Axis-angle (convert to quaternion) 14 30 2 6
Composition of two axis-angle pairs is unthinkable in an application that requires
computational efficiency. One way to do the composition is to convert to matrices,
multiply the matrices, then extract the axis-angle pair. The two conversions from
axis-angle to matrix cost 26A + 30M + 4F , the matrix product costs 18A + 27M,
and the conversion from matrix to axis-angle costs 8A + 7M + 1D + 2F . The total
cost is 52A + 64M + 1D +6F .
Another way to do the composition of two axis-angle pairs is to convert to quater-
nions, multiply the quaternions, then extract the axis-angle pair. The two conversions
from axis-angle to quaternion cost 2A + 10M + 2D +4F , the quaternion product
costs 12A +16M, and the conversion from quaternion to axis-angle costs 4M + 2F .
The total cost is 14A + 30M + 2D +6F . Table A.5 is a summary of the operation
counts for composing two rotations.
Interpolation
This section discusses how to interpolate rotations for each of the three representa-
tion schemes.

A.4 Representations of 3D Rotations 867
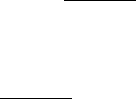
Table A.6
Operation counts for quaternion interpolation.
Term AMDF
a
0
= p · q 34
θ = cos
−1
(a
0
) 1
1 − t 1
(1 − t)θ 1
tθ 1
sin(θ) 1
sin((1 − t)θ) 1
sin(tθ) 1
a
1
= 1/ sin(θ) 1
a
2
= a
1
sin((1 − t)θ) 1
a
3
= a
1
sin(tθ) 1
a
2
p + a
3
q 48
Total 8 16 1 4
Quaternion Interpolation
Quaternions are quite amenable to interpolation. The standard operation that is used
is spherical linear interpolation, affectionately known as slerp. Given quaternions p
and q with acute angle θ between them, slerp is defined as s(t; p, q) = p(p
∗
q)
t
for
t ∈[0, 1]. Note that s(0; p, q) =p and s(1; p, q) =q. An equivalent definition of slerp
that is more amenable to calculation is
s(t; p, q) =
sin((1 − t)θ)p + sin(tθ )q
sin(θ)
If p and q are thought of as points on a unit circle, the formula above is a parameter-
ization of the shortest arc between them. If a particle travels on that curve according
to the parameterization, it does so with constant speed. Thus, any uniform sampling
of t in [0, 1]produces equally spaced points on the arc.
We assume that only p, q, and t are specified. Moreover, since q and −q rep-
resent the same rotation, you can replace q by −q if necessary to guarantee that
the angle between p and q treated as 4-tuples is acute. That is, p · q ≥ 0. As 4-
tuples, p and q are unit length. The dot product is therefore p · q = cos(θ). Table
A.6 shows the operation counts. Any term shown on the left that includes an already
computed term has only its additional operations counted to avoid double-counting
operations.
868 Appendix A Numerical Methods
Rotation Matrix Interpolation
The absence of a meaningful interpolation formula that directly applies to rotation
matrices is used as an argument for the superiority of quaternions over rotation
matrices. However, rotations can be interpolated directly in a way equivalent to what
slerp produces. If P and Q are rotations corresponding to quaternions p and q, the
slerp of the matrices is
S(t; P, Q) = P(P
T
Q)
t
the same formula that defines slerp for quaternions. The technical problem is to
define what is meant by R
t
for a rotation R and real-valued t. If the rotation has axis
ˆa and angle θ, then R
t
has the same rotation axis, but the angle of rotation is tθ.The
procedure for computing the slerp of the rotation matrices is
1. Compute R = P
T
Q.
2. Extract an axis ˆa and an angle θ from R.
3. Compute R
t
by converting the axis-angle pair ˆa, tθ.
4. Compute S(t; P, Q) = PR
t
.
This algorithm requires an axis-angle extraction that involves an inverse trigonomet-
ric function call and a square root operation, a couple of trigonometric evaluations
(for tθ), and a conversion back to a rotation matrix. This is quite a bit more expen-
sive than computing the slerp for quaternions, which requires three trigonometric
function calls. The quaternion interpolation is therefore more efficient, but a purist
wishing to avoid quaternions in an application has, indeed, a method for interpolat-
ing rotation matrices.
Table A.7 shows the operation counts and uses the same format and rules as the
table for quaternion interpolation. Both the quaternion and rotation matrix interpo-
lation use 1 division and 4 function evaluations. However, the number of additions
and multiplications in the rotation matrix interpolation is excessive compared to that
of quaternion interpolation.
Axis-Angle Interpolation
There is no obvious and natural way to produce the same interpolation that occurs
with quaternions and rotation matrices. The only choice is to convert to one of the
other representations, interpolate in that form, then convert the interpolated result
back to axis-angle form. A very expensive proposition, just as in composition of
rotations.

A.5 Root Finding 869
Table A.7
Operation counts for rotation matrix interpolation.
Term A M D F
R = P
T
Q 18 27
a
0
= 0.5(Tra ce (R) − 1) 41
θ = cos
−1
(a
0
) 1
d = (r
21
− r
12
, r
02
− r
20
, r
10
− r
01
) 3
a
1
= 1/|
d| 2311
ˆa =a
1
d 3
tθ 1
a
2
= sin(tθ ) 1
a
3
= 1 − cos(tθ ) 11
Matrix S,nocost
S
2
36
R
t
= I + a
2
S + a
3
S
2
99
PR
t
18 27
Total 58 77 1 4
A.5 Root Finding
Given a continuous function
F : D ⊂R
n
→ R
n
, the problem is to find an x (or find
a set of points) for which
F(x) = 0.
A.5.1 Methods in One Dimension
Given a continuous function f :[a, b] → R, the first question is whether or not
f(r)=0 for some r ∈[a, b]. I f f(a)f(b)<0, then there is at least one root. However,
there may be multiple roots. If a root r is computed, other analyses are required to
locate others. For example, if f is a polynomial and r is a root, the function can be
factored as f(t)= (t − r)
p
g(t),wherep ≥ 1 and g is a polynomial with degree(g) =
degree(f ) − p. The root-finding process is now continued with function g on [a, b].
If f(a)f(b)>0, there is no guarantee that f hasarooton[a, b].Forproblemsof
this type, a root-bounding preprocessing step can be used. The interval is partitioned
into t
i
= a + i(b − a)/n for 0 ≤ i ≤ n.Iff(t
i
)f (t
i+1
)<0 for some i, then that
subinterval is bisected to locate a root. A reasonable choice of n will be related to
what information the application knows about its function f .

870 Appendix A Numerical Methods
Finally, it might be necessary to find roots of f : R → R where the domain of f
is not a bounded interval. Roots of f can be sought in the interval [−1, 1]. Any root
t of f outside this interval can be computed as t = 1/r,wherer ∈ [−1, 1]is a root of
g(r) = f(1/r).
Bisection
Bisection is the process of finding a root to a continuous function f :[a, b] → R by
bracketing a root with an interval, then successively bisecting the interval to narrow in
on the root. Suppose that initially f(a)f(b)<0. Since f is continuous, there must
bearootr ∈ (a, b). The midpoint of the interval is m = (a + b)/2. The function
value f (m) is computed and compared to the function values at the end points. If
f (a)f (m) < 0, then the subinterval (a, m) brackets a root and the bisection process
is repeated on that subinterval. If f (m)f (b) < 0, then the subinterval (m, b) brackets
a root and the bisection process is repeated instead on that subinterval. If f (m) = 0
or is zero within a specified tolerance, the process terminates. A stopping condition
might also be based on the length of the current subinterval—that is, if the length
becomes small enough, terminate the algorithm. If a root exists on [a, b], bisection is
guaranteed to find it. However, the rate of convergence is slow.
Newton’s Method
Given a differentiable function f : R → R, an initial guess is chosen about where f
is zero, (x
0
, f(x
0
)). The tangent line to the graph at this point is used to update the
estimate to a (hopefully) better one. The tangent line is y − f(x
0
) = f
(x
0
)(x − x
0
)
and intersects the x-axis at (0, x
1
),so−f(x
0
) =f
(x
0
)(x
1
−x
0
). Assuming f
(x
0
) =
0, solving for x
1
yields
x
1
= x
0
−
f(x
0
)
f
(x
0
)
The next point in the iteration is (x
1
, f(x
1
)), and the process is repeated until a
stopping condition is met, typically one based on closeness of the function value to
zero. Unlike bisection, the iterations are not guaranteed to converge, but if there is
convergence, it is at a faster rate. Success depends a lot on the initial guess for x
0
.
Polynomial Roots
A polynomial of degree n is f(t)=
n
i=0
a
i
t
n
,wherea
n
= 0. While standard root
finders may be applied to polynomials, a better approach takes advantage of the
A.5 Root Finding 871
nature of such functions. For 2 ≤ n ≤ 4, there are closed-form equations for the
roots of the polynomial. Direct application of the formulas is possible, but numer-
ical problems tend to occur, particularly when the polynomial has a root of mul-
tiplicity larger than 1. For example, the roots of a quadratic f(t)= at
2
+ b
t
+ c
are t = (−b ±
√
b
2
− 4ac)/(2a).Ifb
2
− 4ac = 0, the quadratic has a double root
t =−b/(2a). However, numerical round-off errors might cause b
2
− 4ac =−.<0
for very small .. Another condition that leads to numerical problems is if a is nearly
zero. If so, it is possible to solve g(t) = t
2
f(1/t) = ct
2
+ bt + a = 0 and get t =
(−b ±
√
b
2
− 4ac)/(2c). But the problem still exists if c is also nearly zero. Similar
problems occur with the formulas for cubic and quartic polynomials.
An approach based on iteration schemes is to attempt to bracket the roots in a
way that each bracketing interval contains exactly one root. For each such interval,
bisection can be applied to find the root. A hybrid scheme is also possible that mixes
bisection steps with Newton steps; the bisection step is used only when the Newton
step generates an iterate outside the current bracketing interval. The hope is that the
Newton iterates converge quickly to the root, but if they appear not to, bisection
attempts to generate better initial guesses for the Newton iteration.
Bounding Roots by Derivative Sequences
A simple approach to the bracketing problem is to partition R into intervals, the
polynomial f(t) being monotone on each interval. If it can be determined where
the derivative of the polynomial is zero, this set provides the partition. If d
i
and
d
i+1
are consecutive values for which f
(d
i
) =f
(d
i+1
) =0, then either f
(t) > 0on
(d
i
, d
i+1
) or f
(t) < 0on(d
i
, d
i+1
). In either case, f can have at most one root on the
interval. The existence of this root is guaranteed by the condition f(d
i
)f (d
i+1
)<0
or f(d
i
) = 0orf(d
i+1
) = 0.
Solving f
(t) =0 requires the same techniques as solving f(t)=0. The difference
is that degree(f
) =degree(f ) − 1. A recursive implementation is warranted for this
problem, the base case being the constant polynomial that is either never zero or
identically zero on the real line.
If f
(t) = 0 for t ∈ (−∞, d
0
), it is possible that f has a root on the semi-infinite
interval (−∞, d
0
]. Bisection does not help locate a root because the interval is un-
bounded. However, it is possible to determine the largest bounded interval that con-
tains the roots of a polynomial. The construction relies on the concepts of spectral
radius and norm of a matrix (see Horn and Johnson 1985). Given a square matrix
A, the spectral radius, denoted ρ(A), is the maximum of the absolute values of the
eigenvalues for the matrix. A matrix norm of A, denoted A, is a scalar-valued func-
tion that must satisfy the five conditions: A≥0, A=0 if and only if A = 0,
cA=|c|A for any scalar c, A + B≤A+B, and AB≤AB||.The
relationship between the spectral radius and any matrix norm is ρ(A) ≤A.Given
f(t)=
n
i=0
a
i
t
i
,wherea
n
= 1, the companion matrix is
872 Appendix A Numerical Methods
A =
−a
n−1
−a
n−2
··· −a
1
−a
0
10··· 00
01··· 00
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
00··· 10
The characteristic polynomial is f(t)= det(A − tI), so the roots of f are the
eigenvalues of A. The spectral norm therefore provides a bound for the roots. Since
there are lots of matrix norms to choose from, there are many possible bounds. One
such bound is Cauchy’s bound:
|t|≤max{|a
0
|,1+|a
1
|, ...,1+|a
n−1
|} = 1 + max{|a
0
|, ..., |a
n−1
|}
Another bound that can be obtained is the Carmichael and Mason bound:
|t|≤
1 +
n−1
i=0
|a
i
|
2
If a
0
= 0, then f(0) = 0, so the roots of f are bounded away from zero. It is possible
to construct lower bounds by using g(t) = [t
n
f(1/t)]/a
0
. The roots of g(t) are the
reciprocal roots of f(t). Cauchy’s bound applied to g(t), then taking reciprocals, is
|t|≥
|a
0
|
1 + max{1, |a
1
|, ..., |a
n−1
|}
The Carmichael and Mason bound is
|t|≥
|a
0
|
1 +
n−1
i=0
|a
i
|
2
These bounds are used in the recursive call to determine where f(t)is monotone.
The polynomial can be factored f(t)=t
p
g(t),wherep ≥0 and g is a polynomial for
which g(0) = 0. If p = 0, then f =g and f is processed for 0 <a≤|t |≤b,where
a and b are bounds computed from the previously mentioned inequalities. If p>0,
then g is processed on the intervals obtained by using the bounds from the same
inequalities.
Bounding Roots by Sturm Sequences
Consider a polynomial f(t)defined on interval [a, b]. A Sturm sequence for f isaset
of polynomials f
i
(t),0≤i ≤m, such that degree(f
i+1
)>degree(f
i
) and the number
of distinct real roots for f in [a, b]isN = s(a) − s(b),wheres(a) is the number
of sign changes of f
0
(a), ..., f
m
(a) and s(b) is the number of sign changes of

A.5 Root Finding 873
Table A.8
Signs of the Sturm polynomials for t
3
+ 3t
2
− 1 at various t values.
t Sign f
0
(t) Sign f
1
(t) Sign f
2
(t) Sign f
3
(t) Sign changes
−∞ − + − + 3
−3 −+−+ 3
−2 + 0 −+ 2
−1 +−−+ 2
0 − 0 ++ 1
+1 ++++ 0
+∞ + + + + 0
Table A.9 Signs of the Sturm polynomials for (t − 1)
3
at various t values.
t Sign f
0
(t) Sign f
1
(t) Sign f
2
(t) Sign changes
−∞ − + 01
0 −+01
+∞ + + 00
f
1
(b), ..., f
m
(b). The total number of real-valued roots of f on R is s(−∞) −s(∞).
It is not always the case that m = degree(f ).
The classic Sturm sequence is f
0
(t) =f(t), f
1
(t) =f
(t), and f
i
(t) =−Remain-
der (f
i−2
/f
i−1
) for i ≥ 2. The polynomials are generated by this method until the
remainder term is a constant. An instructive example from the article by D. G. Hook
and P. R. McAree in Glassner (1990) is f(t)= t
3
+ 3t
2
− 1. The Sturm sequence is
f
0
(t) =t
3
+3t
2
−1, f
1
(t) =3t
2
+6t, f
2
(t) =2t +1, and f
3
=9/4. Table A.8 lists the
signs of the Sturm polynomials for various t values. Letting N(a, b) denote the num-
ber of real-valued roots on the interval (a, b), the table shows that N(−∞, −3) = 0,
N(−3, −2) =1, N(−2, −1) =0, N(−1, 0) =1, N(0, 1) =1, and N(1, ∞) =0. More-
over, the number of negative real roots is N(−∞,0) =2, the number of positive real
roots is N(0, ∞) = 1, and the total number of real roots is N(−∞, ∞) = 3.
The next example shows that the number of polynomials in the Sturm sequence is
not necessarily the degree(f ) +1. The function f(t)=(t −1)
3
has a Sturm sequence
f
0
(t) = (t − 1)
3
, f
1
(t) = 3(t − 1)
2
, and f
2
(t) ≡ 0 since f
1
exactly divides f
0
with no
remainder. Table A.9 lists sign changes for f at various t values. The total number of
real roots is N(−∞, ∞) = 1.