Balakumar Balachandran, Magrab E.B. Vibrations
Подождите немного. Документ загружается.

0 2 4 6 8 10 12
0.1
0
0.05
0.1
t
(a)
0 2 4 6 8 10 12
0.1
0.05
0
0.05
t
x
2
(t)
(b)
0.05
x
1
(t)
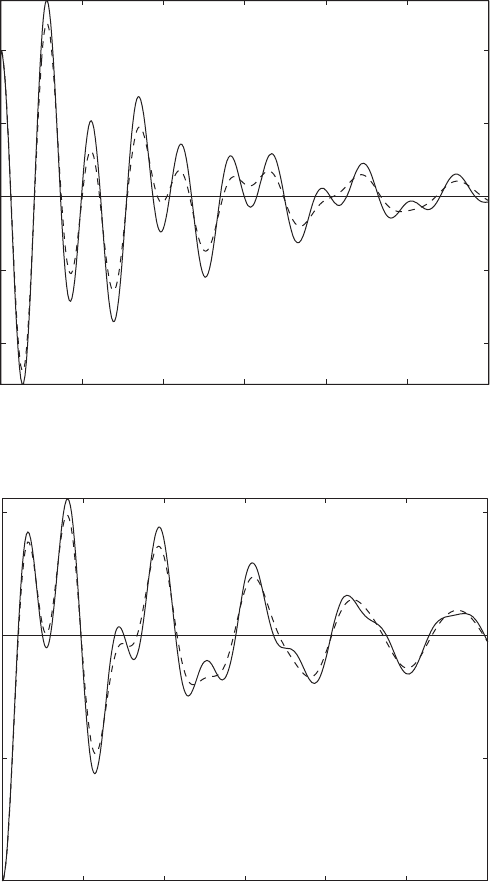
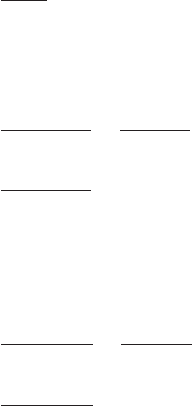
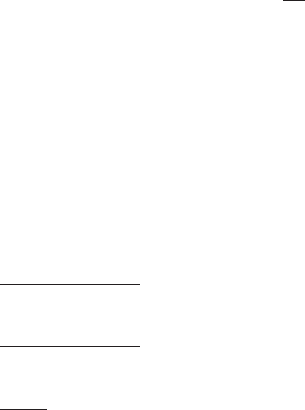
FIGURE 8.7
Displacements of a two degree-of-freedom system with two different damping models when
both masses are subjected to equal, but opposite, initial displacements: (a) displacement of
m
1
and (b) displacement of m
2
. Solid lines correspond to the constant damping model of Ex-
ample 8.2 with z 0.05 and dashed lines correspond to an arbitrary damping model whose
damping matrix is given by Eq. (g).
which is not a diagonal matrix. In this case, the matrix given by Eq. (g) is
used along with the matrices and from Eqs. (a) of Example 7.20 to
form the matrices and in Eqs. (8.58). These matrices are used, in turn,
in Eq. (8.56) to numerically obtain the state vector {Y}. The results for the dis-
placement states are shown in Figure 8.7.
On comparing the results of Figure 8.7, it is seen that there are discernible
differences between the free oscillations of the two cases in which the only dif-
ference between the models of the two systems is due to the damping matrix.
8.4
LAPLACE TRANSFORM APPROACH
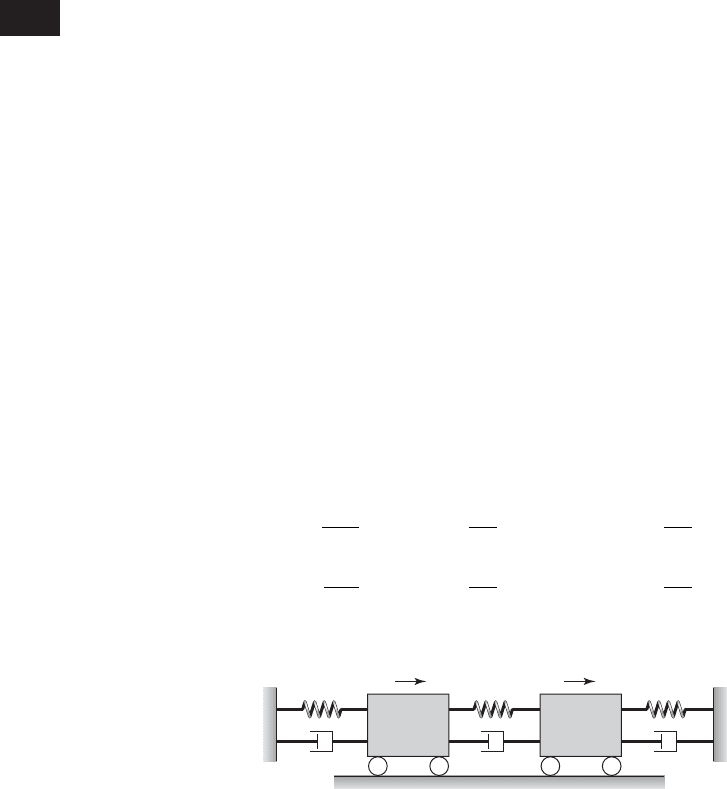
In this section, the general solution for the response of a system such as that
shown in Figure 8.8 is determined by using Laplace transforms. This method
is applicable to linear systems of differential equations with constant coeffi-
cients, either in the second-order form of Eq. (7.3) or in the first-order form
of Eq. (8.56). The procedure to determine the solution follows along the lines
of what was illustrated in Appendix D for single degree-of-freedom systems.
First, the governing system of differential equations is transformed into an al-
gebraic system of equations by using Laplace transforms. Next, we solve this
algebraic system to determine the responses of the different inertial elements
in the Laplace domain. In the final step, these responses are transformed back
to the time domain by using the inverse Laplace transform. As had been done
in Chapter 4, this final step is not explicitly carried out here. Instead, we ei-
ther take recourse to tables such as those presented in Appendix A or numer-
ically evaluate the quantities with the appropriate MATLAB functions.
For purposes of illustration and algebraic ease, the discussion is re-
stricted to two degree-of-freedom systems. The governing equations of mo-
tion of the system shown in Figure 8.8 are given by Eq. (7.1b), which are re-
peated below.
(8.60) m
2
d
2
x
2
dt
2
1c
2
c
3
2
dx
2
dt
1k
2
k
3
2x
2
c
2
dx
1
dt
k
2
x
1
f
2
1t 2
m
1
d
2
x
1
dt
2
1c
1
c
2
2
dx
1
dt
1k
1
k
2
2x
1
c
2
dx
2
dt
k
2
x
2
f
1
1t 2
3B 43A 4
3K 43M 4
3C 4
8.4 Laplace Transform Approach 471
k
3
c
3
k
2
c
2
x
1
, f
1
(t) x
2
, f
2
(t)
k
1
c
1
m
1
m
2
FIGURE 8.8
System with two degrees of freedom.
Introducing the nondimensional quantities from Eqs. (7.41) and the following
additional quantities for the nondimensional time, damping factor, and damp-
ing coefficient ratio, respectively,
(8.61)
Eqs. (8.60) are rewritten as
(8.62)
Carrying out the Laplace transforms of the different terms on each side
of Eqs. (8.62) and making use of Laplace transform pair 2 in Table A of
Appendix A, we arrive at
(8.63)
where the coefficients A(s), B(s), C(s), and E(s) are given by
(8.64)
and
(8.65)
In Eqs. (8.65), the transforms K
1
(s) and K
2
(s) are determined by the forcing
and the initial conditions, the overdot indicates the time derivative with re-
spect to the nondimensional time t, X
1
(s) and X
2
(s) are the Laplace transforms
of x
1
(t) and x
2
(t), respectively, and F
1
(s) and F
2
(s) are the Laplace transforms
of the force inputs, f
1
(t) and f
2
(t), respectively. Furthermore, x
1
(0) and (0)
are the initial displacement and the initial velocity of mass m
1
, respectively,
and x
2
(0) and are the initial displacement and the initial velocity of mass
m
2
, respectively.
x
#
2
10 2
x
#
1
K
2
1s 2
F
2
1s 2
k
1
m
r
x
#
2
10 2 3s 2z
2
v
r
11 c
32
24x
2
10 2 2z
2
v
r
x
1
10 2
K
1
1s 2
F
1
1s 2
k
1
x
#
1
10 2 3s 2z
1
2z
2
m
r
v
r
4x
1
10 2 2z
2
m
r
v
r
x
2
10 2
E1s2 s
2
2z
2
v
r
11 c
32
2s v
2
r
11 k
32
2
C1s 2 B1s 2/m
r
2z
2
v
r
s v
2
r
B1s 2 2z
2
m
r
v
r
s m
r
v
2
r
A1s 2 s
2
21z
1
z
2
m
r
v
r
2s 1 m
r
v
2
r
C1s 2X
1
1s 2 E1s2X
2
1s 2 K
2
1s 2
A1s2X
1
1s 2 B1s2X
2
1s 2 K
1
1s 2
v
2
r
11 k
32
2x
2
2z
2
v
r
dx
1
dt
v
2
r
x
2
f
2
1t 2
k
1
m
r
d
2
x
1
dt
2
2z
2
v
r
11 c
32
2
dx
2
dt
11 m
r
v
2
r
2x
1
2z
2
m
r
v
r
dx
2
dt
m
r
v
2
r
x
2
f
1
1t 2
k
1
d
2
x
1
dt
2
12z
1
2z
2
m
r
v
r
2
dx
1
dt
t v
n1
t,
2z
j
c
j
m
j
v
nj
,
and
c
32
c
3
c
2
472 CHAPTER 8 Multiple Degree-of-Freedom Systems

Solving for X
1
(s) and X
2
(s) from Eqs. (8.63) yields
(8.66)
where the denominator D
1
(s) is given by
(8.67)
From Eq. (8.67), we can obtain the characteristic equation associated
with free oscillations of a two degree-of-freedom system by setting the damp-
ing factors z
1
z
2
0 and s j. This results in the characteristic equation,
Eq. (7.45), which was obtained in the context of free oscillations of the un-
damped system.
The desired displacement responses x
1
(t) and x
2
(t) are determined by ex-
ecuting the inverse Laplace transforms of X
1
(s) and X
2
(s) given by Eqs. (8.66).
The solution
(8.68)
is referred to as the general solution for the response of the two degree-of-
freedom system given by Eqs. (8.62). The symbol L
1
denotes the inverse
Laplace transform. To determine the inverse Laplace transforms in Eqs.
(8.68), the method of partial fractions and the table provided in Appendix A
can be used. Alternatively, readily available algorithms such as the ones in the
MATLAB Controls Toolbox and Symbolic Math Toolbox can be used to de-
termine the responses based on Eqs. (8.66). In the next two sections, we il-
lustrate how the responses can be determined for arbitrary forcing and arbi-
trary initial conditions.
8.4.1 Response to Arbitrary Forcing
If we assume that the initial conditions are zero and that we have arbitrary
forcing, the transforms K
1
(s) and K
2
(s) in Eqs. (8.65) reduce to
(8.69)
where F
i
(s) is the Laplace transform of the force input f
i
(t). We now consider
two cases of forcing.
K
2
1s 2
F
2
1s 2
k
1
m
r
K
1
1s 2
F
1
1s 2
k
1
x
j
1t 2 L
1
3X
j
1s 24
for
j 1, 2
v
2
r
31 k
32
11 m
r
v
2
r
24
32z
2
v
r
2z
1
v
2
r
2k
32
v
2
r
1z
1
z
2
v
r
m
r
2 2c
32
z
2
v
r
11 m
r
v
2
r
24s
31 m
r
v
2
r
v
2
r
4z
1
z
2
v
r
v
2
r
k
32
4z
2
v
r
c
32
1z
1
z
2
v
r
m
r
24s
2
D
1
1s 2 s
4
32z
1
2z
2
v
r
m
r
2z
2
v
r
11 c
32
24s
3
X
2
1s 2
K
1
1s 2C1s2
D
1
1s 2
K
2
1s 2A1s2
D
1
1s 2
X
1
1s 2
K
1
1s 2E1s2
D
1
1s 2
K
2
1s 2B1s2
D
1
1s 2
8.4 Laplace Transform Approach 473
Impulse Excitation
As a first case, we determine the response of the vibratory system shown in
Figure 8.8, when the second mass is subjected to an impulse; that is,
(8.70)
Upon using the Laplace transform pair 5 in Table A of Appendix A, we de-
termine that
(8.71)
Then, from Eqs. (8.69), the transforms K
1
(s) and K
2
(s) are
(8.72)
Based on Eqs. (8.66) and (8.72), the displacement responses in the Laplace
domain are given by
(8.73)
For the special case where k
3
c
3
0 in Figure 8.8—that is k
32
c
32
0—the polynomial D
1
(s) reduces to
(8.74)
and Eqs. (8.73) reduce to
(8.75)
Step Input
As a second case, we consider the determination of the response of the vibra-
tory system shown in Figure 8.8 when the second mass is subjected to a step
input; that is,
(8.76)
Upon using the Laplace transform pair 6 in Table A of Appendix A, we de-
termine that
(8.77)F
2
1s 2
F
o
s
f
1
1t 2 0
and
f
2
1t 2 F
o
u1t 2
X
2
1s 2
F
o
A1s 2
k
1
m
r
D
2
1s 2
X
1
1s 2
F
o
B1s 2
k
1
m
r
D
2
1s 2
F
o
C1s 2
k
1
D
2
1s 2
32z
2
v
r
2z
1
v
2
r
4s v
2
r
D
2
1s 2 s
4
32z
1
2z
2
v
r
m
r
2z
2
v
r
4s
3
31 m
r
v
2
r
v
2
r
4z
1
z
2
v
r
4s
2
X
2
1s 2
F
o
A1s 2
k
1
m
r
D
1
1s 2
X
1
1s 2
F
o
B1s 2
k
1
m
r
D
1
1s 2
F
o
C1s 2
k
1
D
1
1s 2
K
2
1s 2
F
2
1s 2
k
1
m
r
F
o
k
1
m
r
K
1
1s 2
F
1
1s 2
k
1
0
F
2
1s 2 F
o
f
1
1t 2 0
and
f
2
1t 2 F
o
d1t 2
474 CHAPTER 8 Multiple Degree-of-Freedom Systems
Then, from Eqs. (8.69), the transforms K
1
(s) and K
2
(s) are given by
(8.78)
Based on Eqs. (8.66) and (8.78), the displacement responses in the Laplace
domain are
(8.79)
For the special case where k
3
c
3
0 in Figure 8.8—that is k
32
c
32
0—the polynomial D
1
(s) reduces to D
2
(s) given by Eq. (8.74) and the
responses given by Eqs. (8.79) reduce to
(8.80)
To determine the time-domain responses, the inverse Laplace transforms
of the impulse response given by Eqs. (8.75) and the step response given by
Eqs. (8.80) were evaluated numerically,
9
and the results obtained are shown
in Figures 8.9 and 8.10. In each of Figures 8.9 and 8.10, the response of the
mass m
1
is graphed by using a dashed line and the response of mass m
2
is
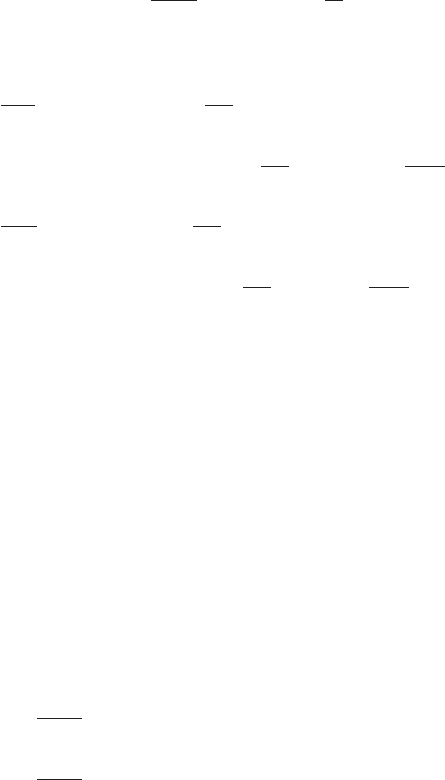
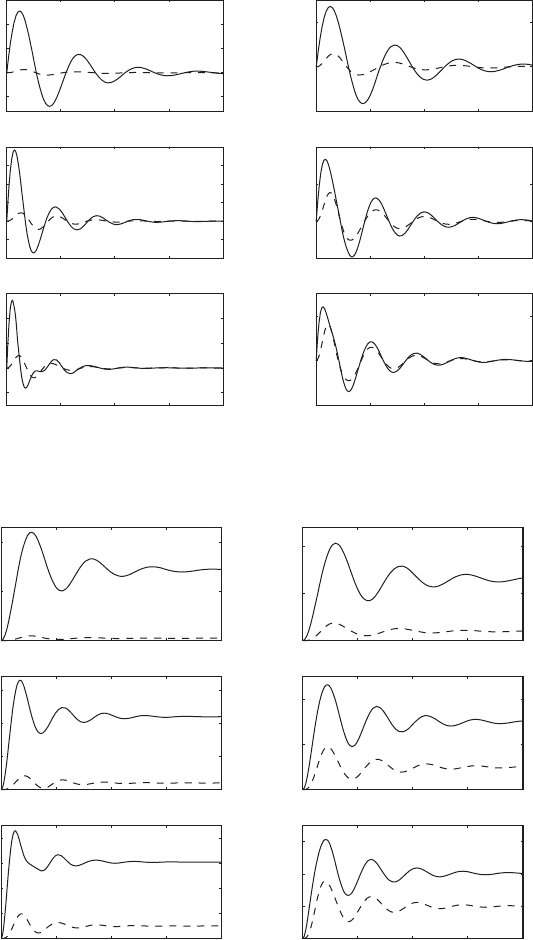
graphed by using a solid line. The response of the second mass is more pro-
nounced compared to the response of the first mass, since the forcing is di-
rectly applied to the second mass. However, due to the coupling in the stiff-
ness and damping matrices, the mass m
1
also responds to the forcing. In the
case of the impulse excitation applied to the second mass, at the higher value
of the mass ratio m
r
, the responses of the first and second masses are charac-
terized by damped oscillations with the same period for v
r
1. In the case of
the step input, this observation is true of the transient oscillations. On exam-
ining Figure 8.10, it is seen that the settling positions of the two masses are
different for the given step input.
8.4.2 Response to Initial Conditions
We use the general solution given by Eqs. (8.66) to examine free oscillations of
the system shown in Figure 8.8 for different initial conditions. In order to iso-
late the response to initial conditions, we set the forcing f
1
(t) and f
2
(t)in
X
2
1s 2
F
o
A1s 2
k
1
m
r
sD
2
1s 2
X
1
1s 2
F
o
B1s 2
k
1
m
r
sD
2
1s 2
F
o
C1s 2
sk
1
D
2
1s 2
X
2
1s 2
F
o
A1s 2
sk
1
m
r
D
1
1s 2
X
1
1s 2
F
o
B1s 2
sk
1
m
r
D
1
1s 2
F
o
C1s 2
sk
1
D
1
1s 2
K
2
1s 2
F
o
sk
1
m
r
K
1
1s 2 0
8.4 Laplace Transform Approach 475
9
The MATLAB functions tf, step, and impulse from the Controls Toolbox were used.
0 10 20 30 40
5
0
5
10
15
r
0.6
r
0.6
r
1
r
1
r
1.4
r
1.4
0 10 20 30 40
0
2
4
6
8
x
1,2
()/(F
o
/k
1
)
x
1,2
()/(F
o
/k
1
)
0 10 20 30 40
2
0
2
4
6
0 10 20 30 40
2
0
2
0 10 20 30 40
1
0
1
2
0 10 20 30 40
1
0
1
(a) (b)
2
4
0 10 20 30 40
0
20
40
0 10 20 30 40
0
5
10
15
x
1,2
()/(F
o
/k
1
)
x
1,2
()/(F
o
/k
1
)
0 10 20 30 40
0
2
4
6
8
0 10 20 30 40
0
5
10
0 10 20 30 40
0
2
4
0 10 20 30 40
0
1
2
3
(a) (b)
r
0.6
r
1
r
1.4
r
0.6
r
1
r
1.4
FIGURE 8.9
Normalized displacement responses
of a two degree-of-freedom system
when m
2
is subjected to an impulse
force, z
1
z
2
0.2, k
3
c
3
0,
and t v
n1
t: (a) m
r
0.1 and
(b) m
r
0.5. [Dashed line x
1
(t);
solid line x
2
(t).]
FIGURE 8.10
Normalized displacement responses
of a two degree-of-freedom system
when m
2
is subjected to a step
force, z
1
z
2
0.2, k
3
c
3
0,
and t v
n1
t: (a) m
r
0.1 and
(b) m
r
0.5. [Dashed line x
1
(t);
solid line x
2
(t).]
Eqs. (8.62) to zero. Therefore, the corresponding Laplace transforms are F
1
(s)
0 and F
2
(s) 0, and the transforms K
1
(s) and K
2
(s) in Eqs. (8.65) reduce to
(8.81)
For the special case where the spring k
3
and the damper c
3
are not present in
Figure 8.8—that is, k
32
c
32
0—the coefficient E(s) in Eqs. (8.64) reduces to
(8.82)
and the function K
2
(s) in Eqs. (8.81) reduces to
(8.83)
The polynomial D
1
(s) in Eq. (8.67) reduces to the polynomial D
2
(s) given by
Eq. (8.74) and, therefore, the responses of the masses m
1
and m
2
given by Eqs.
(8.66) in the Laplace domain reduce to
(8.84)
where K
1
(s) is given by Eqs. (8.81), K
22
(s) is given by Eq. (8.83), E
2
(s) is
given by Eq. (8.82), D
2
(s) is given by Eq. (8.74), and A(s) and B(s) are given
by Eqs. (8.64).
We now consider the special case where the masses m
1
and m
2
in Fig-
ure 8.8 are both subjected to the same initial velocity V
o
; that is, the initial
conditions are
(8.85)
Noting from Eqs. (8.61) that the nondimensional time t v
n1
t, the transforms
K
1
(s) and K
22
(s) given by Eqs. (8.81) and (8.83), respectively, reduce to
(8.86)
and, therefore, Eqs. (8.84) reduce to
(8.87)
The time-domain responses x
1
(t) and x
2
(t) are the inverse transforms of
Eqs. (8.87). These have been obtained numerically
10
and they are shown in
Figure 8.11. In Figure 8.11, solid lines are used to depict the response of the
X
2
1s 2
V
o
v
n1
D
2
1s 2
3C1s2 A1s 24
X
1
1s 2
V
o
v
n1
D
2
1s 2
3E
2
1s 2 B1s24
K
22
1s 2 x
#
2
10 2 V
o
/v
n1
K
1
1s 2 x
#
1
10 2 V
o
/v
n1
x
1
10 2 0,
dx
1
10 2
dt
V
o
,
x
2
10 2 0,
and
dx
2
10 2
dt
V
o
X
2
1s 2
K
1
1s 2C1s2
D
2
1s 2
K
22
1s 2A1s2
D
2
1s 2
X
1
1s 2
K
1
1s 2E
2
1s 2
D
2
1s 2
K
22
1s 2B1s2
D
2
1s 2
K
22
1s 2 x
#
2
10 2 3s 2z
2
v
r
4x
2
10 2 2z
2
v
r
x
1
10 2
E
2
1s 2 s
2
2z
2
v
r
s v
2
r
K
2
1s 2 x
#
2
10 2 3s 2z
2
v
r
11 c
32
24x
2
10 2 2z
2
v
r
x
1
10 2
K
1
1s 2 x
#
1
10 2 3s 2z
1
2z
2
m
r
v
r
4x
1
10 2 2z
2
m
r
v
r
x
2
10 2
8.4 Laplace Transform Approach 477
10
The MATLAB function ilaplace from the Symbolic Toolbox was used.
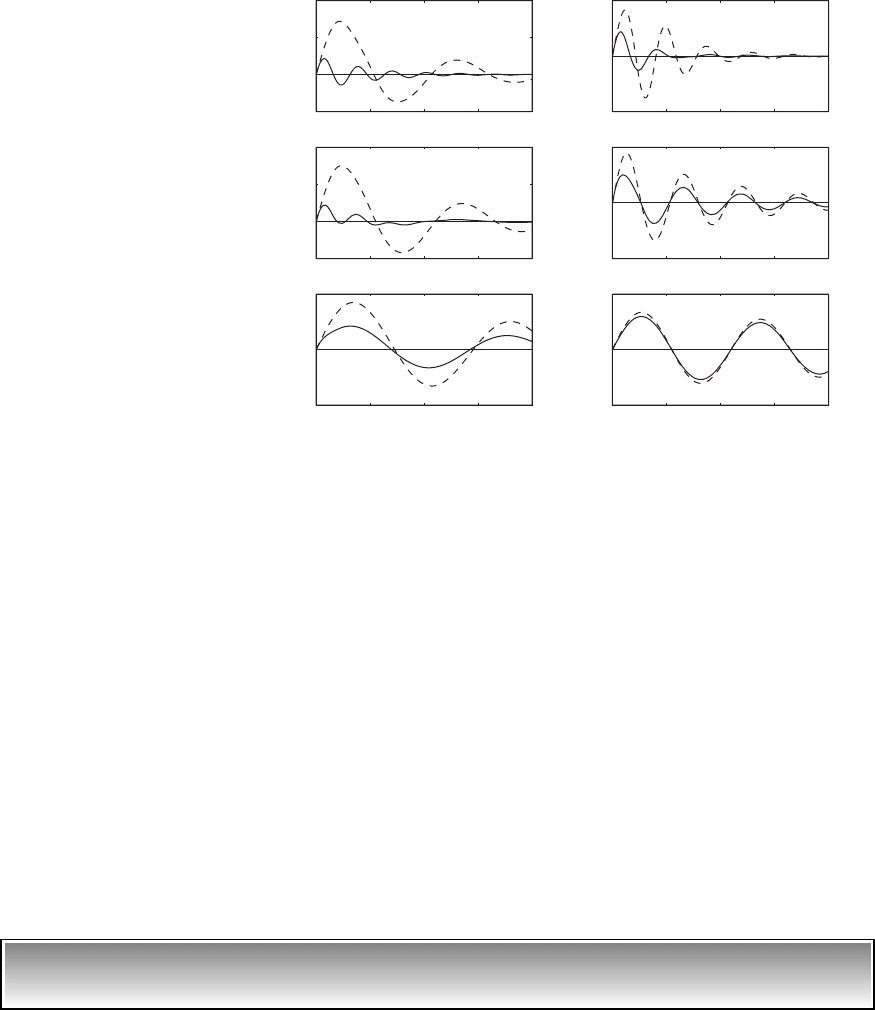
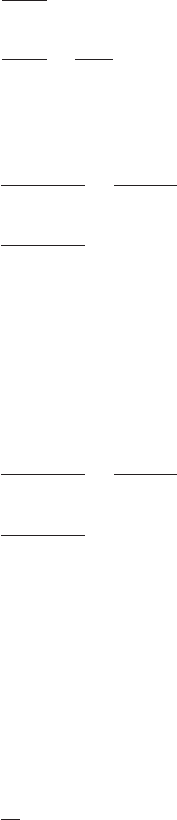
mass m
1
and broken lines are used to depict the response of the mass m
2
. As
expected, the free oscillations of the two masses show characteristics of
damped oscillations, and the long-time responses of these two masses settle
down to the equilibrium position; that is,
(8.88)
For m
r
0.1, it is seen that the periods of the damped oscillations of the two
masses are different. As the mass ratio m
r
increases—that is, the mass m
2
in-
creases in comparison to the mass m
1
—the periods of damped oscillations of
both masses approach each other. As seen for single degree-of-freedom sys-
tems, the responses to initial velocity seen in Figure 8.11 and the responses to
impulses seen in Figure 8.9 have similar characteristics.
EXAMPLE 8.10
Damped free oscillations of a spring-mass system revisited
We return to Example 8.2 and solve for the free-oscillation response of a two
degree-of-freedom system by using Laplace transforms. The mass, stiffness,
and damping matrices used in Examples 7.20 and 8.9 are used to generate the
numerical results for the following initial conditions:
lim
t씮 q
x
1
1t 2 0
and
lim
t씮 q
x
2
1t 2 0
478 CHAPTER 8 Multiple Degree-of-Freedom Systems
0 10 20 30 40
2
0
2
4
m
r
0.1
0 10 20 30 40
2
0
2
4
x
j
()/(V
o
/
n
)
x
j
()/(V
o
/
n
)
m
r
1
0 10 20 30 40
5
0
5
m
r
10
0 10 20 30 40
2
0
2
m
r
0.1
0 10 20 30 40
2
0
2
m
r
1
0 10 20 30
40
5
0
5
m
r
10
(a) (b)
FIGURE 8.11
Responses of m
1
and m
2
when the masses are each subjected to the same initial velocity for
different mass ratios m
r
, z
1
0.1, z
2
0.2, and different values of v
r
: (a) v
r
0.3 and
(b) v
r
0.865. [Solid line x
1
(t); dashed line x
2
(t).]
(a)
In Eqs. (a) of Example 8.2, d 0.1.
For the initial conditions given in Eqs. (a), Eqs. (8.81) reduce to
(b)
From Eqs. (a) of Example 7.20 and Eqs. (7.41), we determine the following
quantities:
(c)
Furthermore, for the constant modal damping case of Example 8.9, we found
that
(d)
By using Eqs. (8.61), we determine that
(e)
Upon substituting the values given in Eqs. (c), (d), and (e) into
Eqs. (8.64), (8.67) and (b), we obtain
(f)K
2
1s 20.1s 0.0147
K
1
1s 2 0.1s 0.0238
D
1
1s 2 s
4
0.282s
3
4.573s
2
0.479s 2.889
E1s2 s
2
0.115s 1.556
C1s2 0.032s 0.889
B1s2 0.071s 2
A1s2 s
2
0.167s 3
c
32
0.654
0.246
2.662
z
2
0.246
2 2.7 2.722
0.017
z
1
0.332
2 1.2 2.887
0.048
c
3
0.654 N
#
s/m
c
2
0.246 N
#
s/m
c
1
0.332 N
#
s/m
v
r
0.943,
m
r
2.25,
and
k
32
15
20
0.75
v
n1
2.887 rad/s,
v
n2
2.722 rad/s
d5s 2z
2
v
r
12 c
32
26
K
2
1s 23s 2z
2
v
r
11 c
32
24d 2z
2
v
r
d
d5s 2z
1
4z
2
m
r
v
r
6
K
1
1s 2 3s 2z
1
2z
2
m
r
v
r
4d 2z
2
m
r
v
r
d
x
1
10 2 d m,
x
#
1
10 2 0 m/s,
x
2
10 2d m,
and
x
#
2
10 2 0 m/s
8.4 Laplace Transform Approach 479